Domestic cradles are beds that are movable but non-mobile for babies up to five months of age. The “anthropo-mechanical” cradle simulates the physiological movement of the human body. The article reviews scientific literature discussing the impacts of swinging on infants, provides classifications of all currently used cradles due to how the child moves, and briefly describes modern technologies within cradle automation. This made it possible to calculate and propose safe motion parameters within mechatronic cradles. The main conclusions of the article are as follows: (1) the scientific literature reports the beneficial effects of harmonic movement on a child, (2) motion analyses substantiating the classifications of all cradles into six types (tilting, yawing, hammock, Sarong, swing, and surging cradle; the classification criterion included the nature of the cradle movement in relation to the planes and anatomical axes of the child’s body), (3) modern technologies allowing for the use of movement with thoughtful parameters, thus, safer for a child, (4) movement within the parameters similar to the motion and speed passively performed by the child in the womb while a mother is walking was considered beneficial and safe, and (5) the use of advanced technology allows for the possibility to devise and create an automatic mechatronic cradle with a child-safe motion. Future innovative anthropo-mechanical cradles that follow physiological human motion parameters can be used safely, with a vertical amplitude ranging from −13 to + 15 mm and a frequency of up to 2 Hz.
- cradle
- human health
- energy
- monitoring of physical parameters
1. Introduction
2. The Proposed Categorization of Cradle Types Based on State of the Art and Types of Cradles
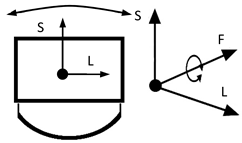
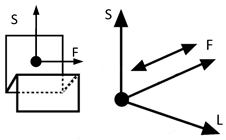
Understanding how cradles are typically designed is crucial to understanding how to improve existing designs and potential automation. Veselovský and Baďura analyzed the history of the development of cradle forms and distinguished three main categories: hanging cradles, pedestal cradles, and base cradles. The hanging cradles were hung inside or outside of the rooms. The pedestal cradles consisted of two subassemblies, a fixed pedestal, and a movable bed, while the base cradles had a “single-body” structure [37][11]. The typology of cradles used in the 19th and the first half of the 20th century, according to Veselovský and Baďura, is presented in Figure 1.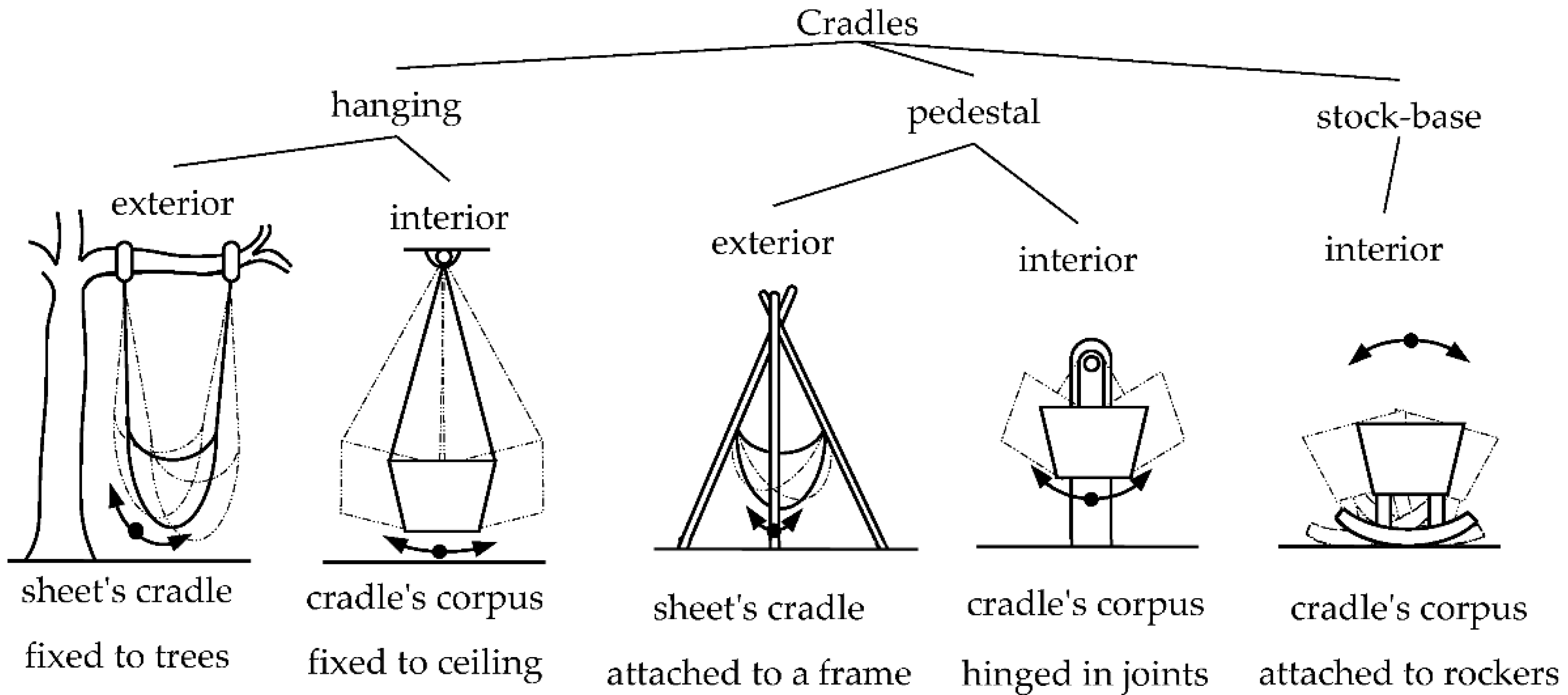
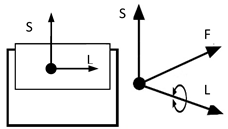
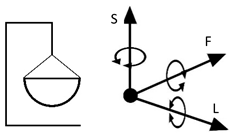
| (a) Tilting Cradle | (b) Yawing Cradle | (c) Hammock Cradle—Two Variants: | |
|---|---|---|---|
 |
 |
 |
|
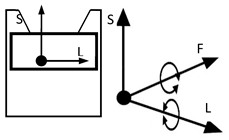
| (d) sarong cradle or one pendulum | (e) swing cradle or two pendulums | (f) surging cradle or four pendulums cradle | |
 |
 |
 |
|
| Notation: F—frontal axis, L— longitudinal axis, S—sagittal axis (according to Figure 3) | |||
| Longitudinal Axis (LA) | Sagittal Axis (SA) | Frontal Axis (FA) | Transverse Plane (TP) | Sagittal Plane (SP) | Coronal Plane (CP) | No. Degrees of Freedom (DoF) | |
|---|---|---|---|---|---|---|---|
| Cradle a | ✓ | (–) | (–) | ✓ | (–) | (–) | 2 |
| Cradle b |
| Bibliographic Reference, Publication Year and No. of Citations in Scopus | The Essence of the Concept | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| [39][17], 1997, 2 | Pendulum swinging system. Swing parameters are in the range of 0.4–1 Hz and 0.36–3.6° | |||||||||
| (–) | (–) | ✓ | (–) | ✓ | (–) | 2 | ||||
| [40][18], 1998, 0 | A swinging system with a noncontact magnetic driving force and various programmable swinging patterns. The band of frequency is limited from 0.4 Hz to 1 Hz, desired swing amplitude of ±0.0018 rad (±0.1°) | Cradle c | ✓ | (–) | (–) | ✓ | (–) | (–) | 2 | |
| [41][19], 2000, 2 | A “static” (nonadaptive) system of a remote swing program selection. Swing parameters within the range 45–50 cycles/min. were used (0.75–83 Hz). The system should not be operated for more than 30 min. | Cradle d | ✓ | ✓ | ✓ | ✓ | 5 | |||
| [42][20] | Cradle e | ✓ | (–) | ✓ (–) | ✓ | ✓ (–) | (–) | 3 + 1 (–) | ||
| Cradle f | ✓ (–) | (–) | (–) | (–) | (–) | ✓ | 1 + 1 (–) | |||
4. Mechatronic Cradle Designs in the Scientific Literature
Many hours of rocking the cradle are arduous, and attempts have been made to mechanize this activity; an early example may be the invention of Marie R. Harper, La Mirada, and Maxine R. Blea, “Automatically rocking baby cradle”, US 3769641, 1973, or the invention of Gim Wong, “Automatic baby crib rocker” US 3952343, 1976. These hnological developments made it possible to construct mechatronic cradles, which relieve the parents of the child and eliminate the risk of spontaneous suffocation of a child left unattended in an excessively tilted cradle [26,28][14| , 2009, 1 |
| Motion sensors, a microphone for recording a baby’s cry, and a system that performs the movement with parameters selected by the algorithm. The cradle movement limits have not been specified. | ||
| ✓ | ||
| (–) | ||
| [43][21], 2011, – | A system detects the baby’s crying, then activates swinging and colored lights. Cradle movement limits the use of parameters that have not been specified (San Jose State University project, not indexed in Scopus). | |
| [44][22], 2013, 4 | A real-time baby sleeping position monitoring and correction system to avoid SIDS (the cradle motors prevent the baby against to sleep in its prone position). Cradle movement limits parameters have not been specified | |
| [45][23], 2015, 6 | Electrically driven cradle with infant cry recognition. The cradle drive uses resonance to reduce energy consumption during use. The desired movement parameters were not specified | Automatic “intelligent” rocking programs, e.g., automatic start swinging when the baby cries, if the baby stops crying before the specified time, the cradle will stop if no alarm or message will be sent to baby caretakers. |
| [46][24], 2016, – | Electric-powered cradle with baby cry recognition and mattress wet alarm. | |
| [47][25], 2017, 1 | The mother’s motion while sleeping with her baby on her lap was modeled and re-created in the cradle. A maximum speed of 0.04 m/s was adopted, and 2 m/s2 was the starting acceleration of the cradle. | |
| [48][26], 2018, 0 | The crying detection and classification (hungry, pain, sleepy, non-crying) system saves the collected data on the server and shares them via the mobile application. Three types of cradle operation: rocking, activating calming music, and alarm. The swing motion parameters have not been specified. | |
| [49][27], 2019, 0 | Infant cry detector and wet mattress sensor, then swinging or sending a message to caregivers. The swing motion parameters have not been specified. | |
| [50][28], 2019, 30 | Remote supervision of a child in the cradle using a laptop or smartphone. Infant crying detection and automatic swing activation. Supervise the humidity and temperature of the air and turn on the fan if it exceeds 28 °C. Possibility of remote switching on calming music. The cradle movement parameters used are not reported. | |
| [51][29], 2020, 0 | Automatic rocking when the baby cries (if the baby stops crying before the specified time has elapsed, the cradle will stop). Alarm or information to caregivers if the baby cries for more than a specific time and when the mattress is wet. Remote monitoring of infant body temperature, heart rate, air temperature, and humidity). Incubator for hospital and home use. | |
| [52][30], 2020, 0 | The web camera, humidity and temperature sensor, cry detector, remote monitoring, and automatic swing system. The swing motion parameters have not been specified. | |
| [53][31] | ||
| , 2021, 0 | ||
| Android-based, remote monitoring system with a motor to swing the cradle, a cry detector, and a wet mattress sensor. | ||
| [56][34], 2021, 0 | A remote monitoring system with sensors identifying a baby’s cry, body temperature, heart rate, and motion and posture status of the infant. The cradle offers electronic swinging, pleasant sounds, and other features, e.g., switching the fan on or off. | |
| [57][35], 2022, 0 | The remote monitoring system of a baby cry, body temperature, and wet mattress sensors. A cradle is equipped with pre-fitted air purification system. The cradle works based on the Internet of Things (IoT) principles and offers electronic swinging, pleasant sounds, and other features, e.g., self-activated automated eye-catching moving toys. | |
| [58][36], 2022, 0 | A machine learning remote monitoring system with baby’s vital signs and ambient parameters sensors. The system automatically swings the infant’s cradle. | |
5. Kinematics of the Gait of a Pregnant Woman: A Brief Review of the Literature and Basic Calculations
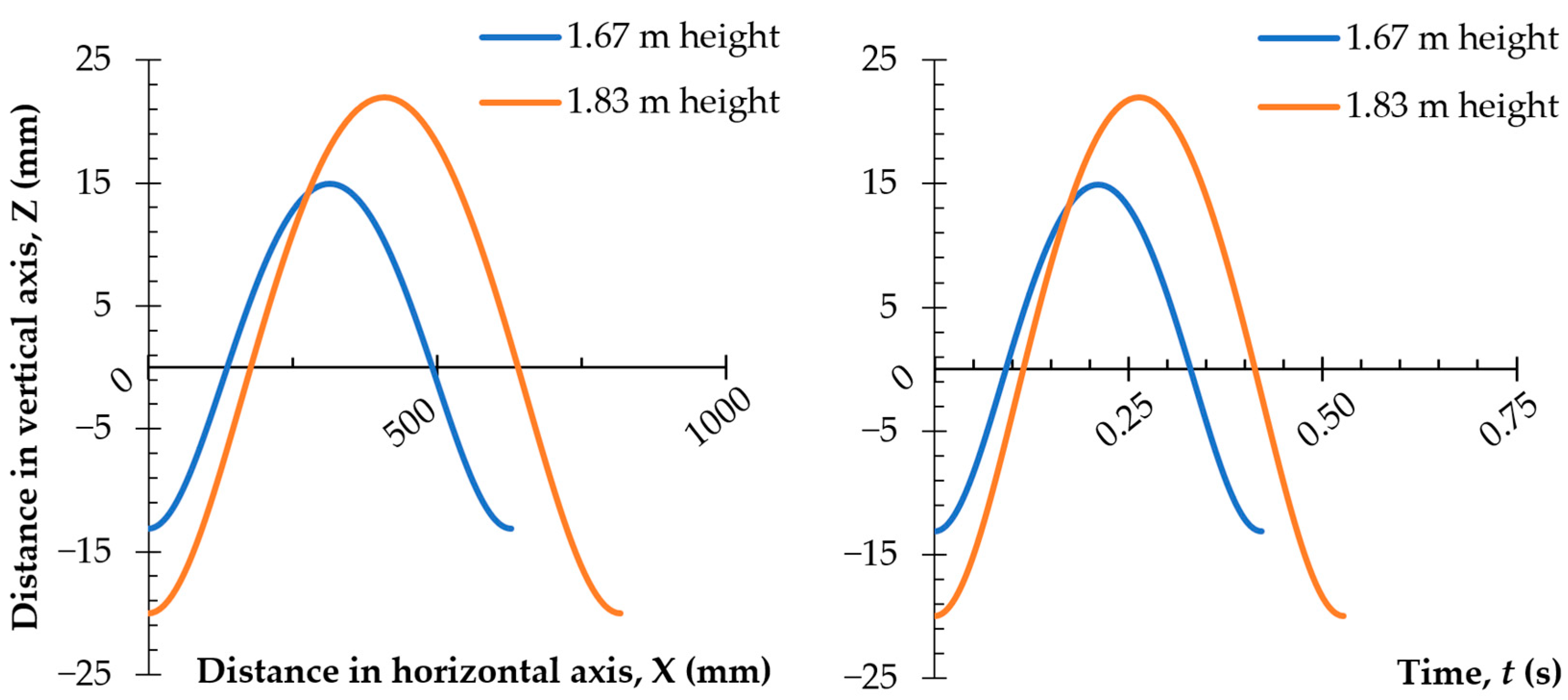
A fetus in intrauterine life is stimulated kinematically by the gait of the pregnant woman. The gait of a pregnant woman is modeled by changes in the position of the center of mass (CoM) within her body while walking at a comfortable speed, the so-called physiological. The first step in evaluating gait is to establish the value of the velocity of various body heights in the advanced pregnancy stage. Knowing the velocity value produced during walking makes it possible to compute the parameters of harmonic movement (amplitude and frequency) concerning the body’s center of gravity. Attaining these parameters allow ilding a cradle with a mechanically forced motion corresponding to the “anthropo-mechanical” parameters. According to Gedliczka and Pochopień, nonpregnant women between the ages of twenty and forty, with a height of 1.61 m, had an average speed of 1.49 m/s while walking [63][41]. The angular range of motion within the joints of the lower limbs of a pregnant woman did not change significantly when compared to the studied control group; however, a change in the length of stride was observed by 3 to 4 cm shorter than the control. [64][42]. The average total length of a pregnant woman’s right and left steps (in the third trimester) was 1.247 m, and the duration of one gait cycle was 1.086 s [65][43]. The inverted pendulum model, a standard human gait model, can determine the approximate characteristics of the movement of the center of mass within the examined body [66][44]. This movement follows a roulette described by the trochoid equation or a specific trochoid like a cycloid. The epicycloid represents the path of a point at the end of the radius on a wheel that rolls without skidding on a flat surface. Figure 5 depicts a graphic representation of this movement.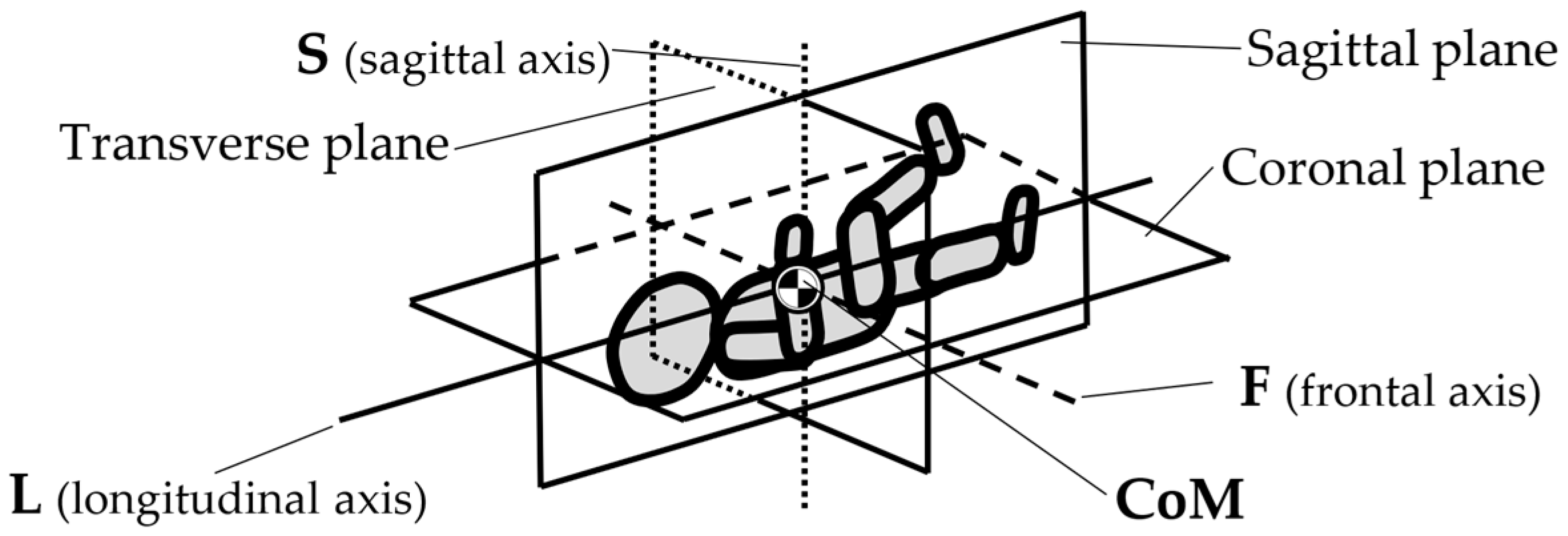
| Height of the Woman (m) | Radius of the Circle R (mm) | Distance of the Point Attached to the Radius from the Center of the Circle r (mm) | Height of the Center of the Circle zo (mm) |
|---|---|---|---|
| 1.67 | 100 | 14 | 0.91 |
| 1.83 | 130 | 21 | 1 |
| , 2020, 1 | |||
| When a cry is detected, the cradle can sway automatically or display a warning light when an abnormality is detected. The swing motion parameters haven’t been specified. | |||
| [ | |||
| 54 | |||
| ] | |||
| [ | |||
| 32 | |||
| ] | |||
| , 2020, 1 | The user can control the cradle’s swing in manual mode and start music playing using a smartphone. The cradle detects crying, in the following, swings automatically, plays calming music, and send messages to the designated phone. | ||
| [55][33] | |||

-
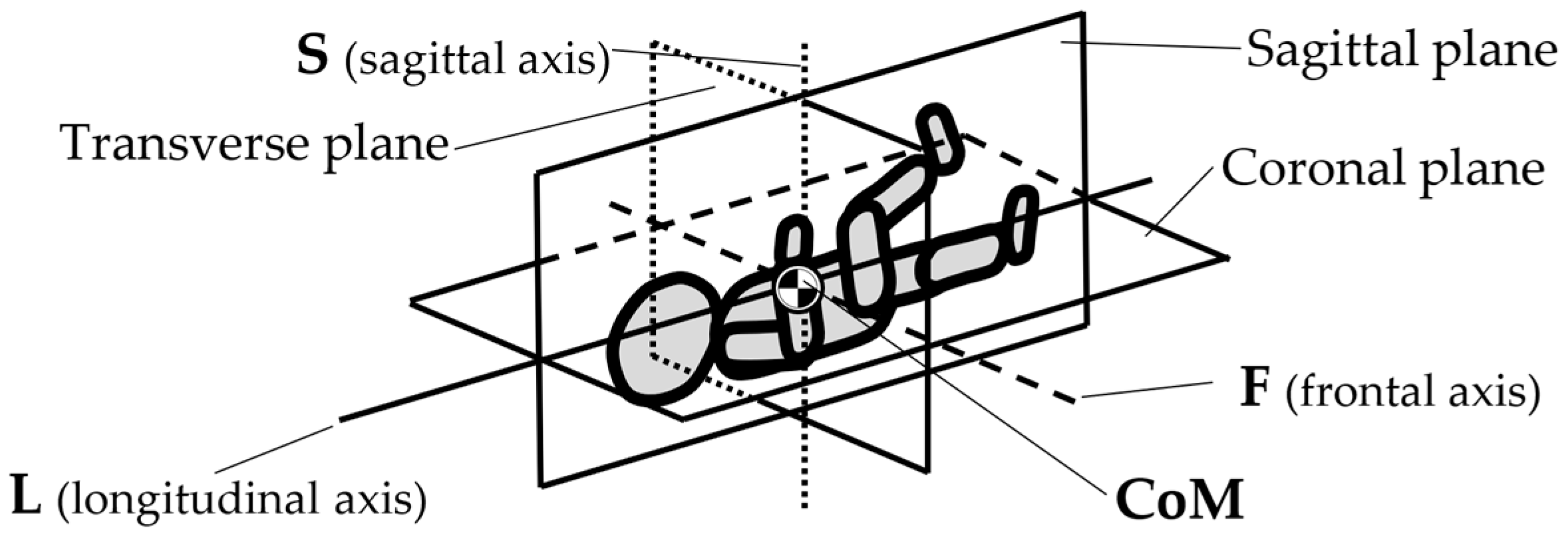
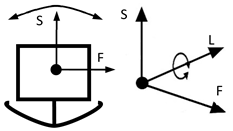
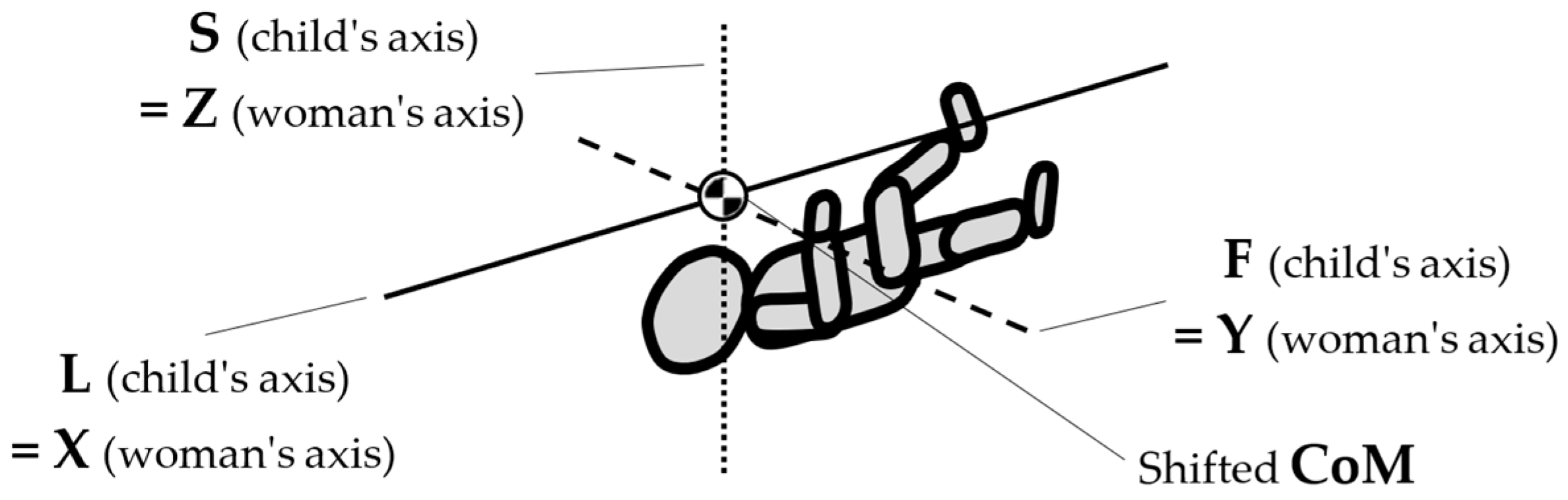
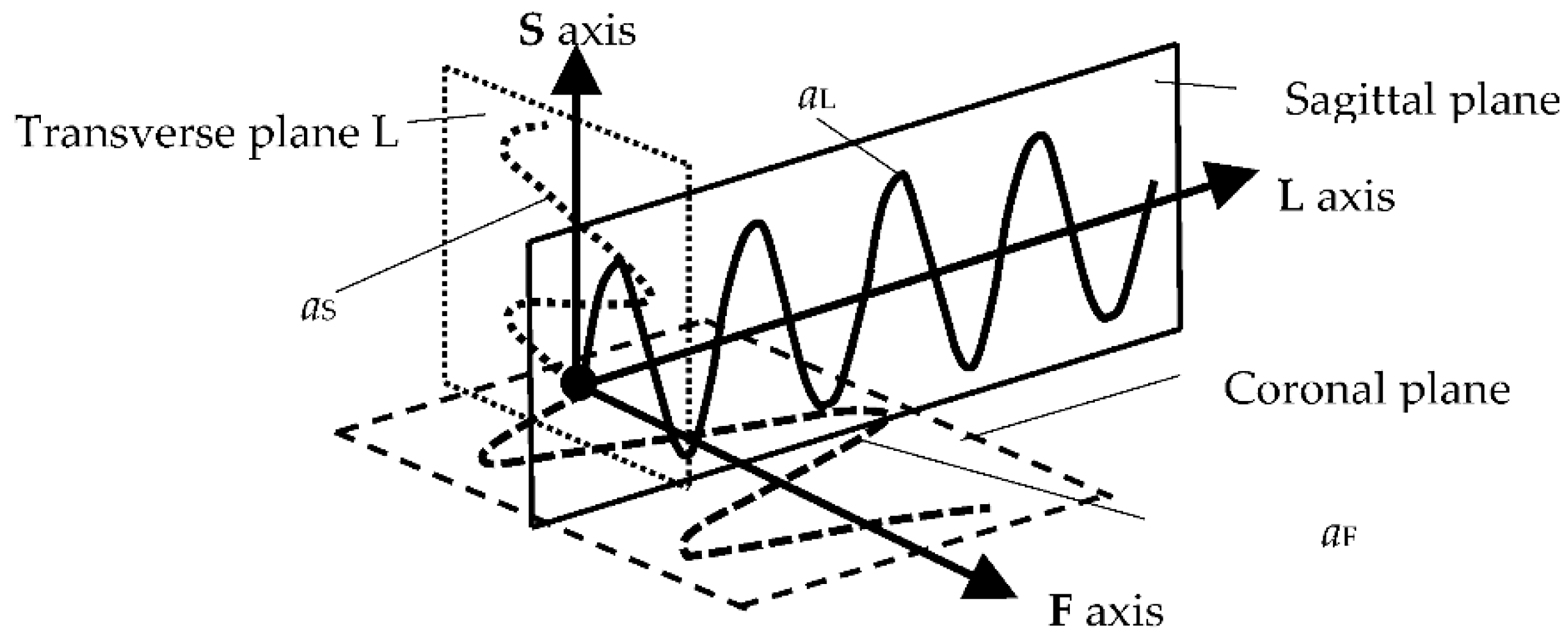
When selecting the parameters of the movement of the anthropo-mechanical cradle, apart from the amplitude in the vertical axis (Z axis in mm) and the frequency (in Hz), it is worth taking into account the remaining parameters of the dynamics of the movement of the woman’s center of mass (CoM) while walking, i.e., amplitudes and accelerations acting on the three anatomical axes of the body (L, F, and S).
-
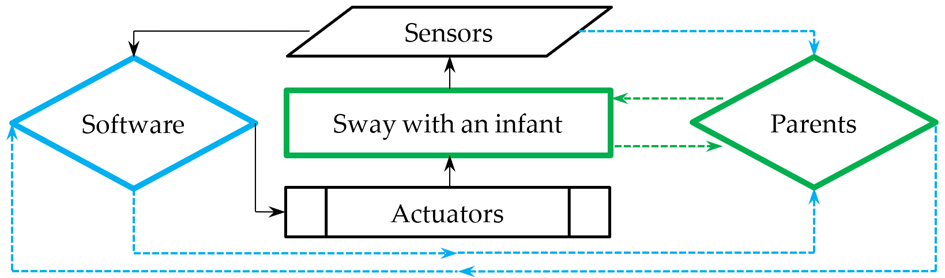
At each tilt, the directions of the accelerations aL, aF, and aS change in the cradle. The direction of the CoM acceleration vector changes only for the S (vertical) and F (transverse) axes during the mother’s gait. For the L axis, the direction of the acceleration vector is constant. Thus, the resultant movement of CoM is quite complex. It takes place simultaneously within the three axes L, F, and S. The challenge would be to obtain a cradle movement where the position of the fetus during pregnancy and the parameters of the physiological gait of a given mother would be correlated. It would then be possible to program the cradle to adjust to each child individually and imitate the movement of being in its mother’s womb. It seems that typical cradles (Table 3) do not best reflect the movement of the CoM within a pregnant woman’s gait. Therefore, a new solution for the cradle structure should be proposed.
-
The frequency of the cradle’s motion must not exceed the resonant frequency of the baby’s organs, as it could pose a danger to the child’s health. Fortunately, these frequencies are larger than the postulated range (up to 2 Hz). As is known, the resonant frequency of the human body ranges from 5 to 10 Hz—depending on the individual’s body structure and position—lying, standing, or sitting [68][46]. However, excitations of a lower frequency can stimulate the abdominal organs to experience strong vibrations [69][47].
6. Conclusions
The harmonic movement has a beneficial calming effect on normal developing babies and a beneficial therapeutic effect on premature babies. The literature cited in Section 2 of the article highlights that constant stimulation of babies’ vestibular system due to systematic rocking improves development and the formation of a restful and consistent sleep cycle. Thus, rocking allows for the transition from being awake to sleeping easier. However, using cradles could increase the risk of suffocation and injury if a limb gets stuck or the baby falls out. Therefore, cradles should meet the minimum requirements described in the standards cited in the Introduction. Mechatronic cradles that mechanize a rocking movement have been described in the literature (usually having an added remote supervision function). However, such devices can be dangerous and may have excessive movement on the child. The information and calculations within the cited literature made it possible to use physiological movements that do not increase the risk of overstimulation; therefore, the parameters of this movement were calculated, and five innovative concepts of cradle design were proposed. The review of the literature and own analysis described in this study suggest that:-
The harmonic movement has a beneficial effect on babies; in particular, rhythmic rocking of the cradle has a positive impact on the development of an infant’s brain and a beneficial therapeutic effect on premature babies. Cradle rocking can naturally link a baby’s two stages of life: when the fetus is rocked in the womb by the mother’s motion of locomotion and the period of independent walking.
-
A crucial component of a cradle’s design involves the safety requirements to prevent falls and entrapment. To avoid the risk of the child falling out: footholds in the cradles are not allowed, minimum side heights are strictly defined, and the maximum age of a child sleeping in the cradle is five months. An excessive tilt of the cradle greater than 10° should be avoided to prevent strangulation or suffocation risks.
-
The multidisciplinary literature review and kinematic analyses suggest that cradles should be classified from the point of view of the possibilities and limitations of a child’s rocking motion parameters and not from a view of the external forms. That is why wresearche rs proposed a classification of cradles into six types, offering from 2 to 5 degrees of freedom in various configurations (tilting, yawing, hammock, Sarong, swing, and surging cradle).
-
Modern technology enables the design of cradle movement to include more thoughtful parameters and ensure the safety of the child. This includes calculating the approximate movement characteristics of the center of mass within the human body while in motion, as well as designing the limits of a cradle’s tilt to correspond with the directions and parameters of the spatial positions of the pelvis during human gait patterns.
-
Compared to mechanically driven cradles, it is preferable to use “anthropo-mechanical” cradle movements to prevent a child from being overstimulated. Child movement in an “anthropo-mechanical” cradle should be maintained within the parameters of the passive motion, and speed performed within the mother’s womb while walking can be considered safe. The movement parameters in such a safe cradle should be determined based on the mother’s height. According to our the analysis, safe cradle movements could be achieved by having a vertical amplitude ranging from −13 to +15 mm and a frequency of up to 2 Hz. The frequencies of the cradle’s movement must not coincide with the resonant frequencies of the baby’s organs, as it can pose dangerous effects on the child’s health.
Literature cited are in open acces article Sydor, M.; Pop, J.; Jasińska, A.; Zabłocki, M. Anthropo-Mechanical Cradles: A Multidisciplinary Review. Int. J. Environ. Res. Public Health 2022, 19, 15759, doi:10.3390/ijerph192315759.
References
- Branowski, B.; Zabłocki, M.; Sydor, M. Experimental Analysis of New Furniture Joints. Bioresources 2018, 13, 370–382.
- Réh, R.; Krišťák, Ľ.; Hitka, M.; Langová, N.; Joščák, P.; Čambál, M. Analysis to Improve the Strength of Beds Due to the Excess Weight of Users in Slovakia. Sustainability 2019, 11, 624.
- Branowski, B.; Starczewski, K.; Zabłocki, M.; Sydor, M. Design Issues of Innovative Furniture Fasteners for Wood-Based Boards. Bioresources 2020, 15, 8472–8495.
- Skorupińska, E.; Wiaderek, K.; Sydor, M. The Withdrawal Resistance of T-Nuts in Various Furniture Materials. Drv. Ind. 2022, 73, 271–277.
- Hitka, M.; Gejdoš, M.; Klement, I.; Simanová, Ľ. Dimensional Solution for Beds from Wood Composites for the Bariatric Population. BioRes 2022, 17, 6656–6667.
- Branowski, B.; Zabłocki, M.; Kurczewski, P.; Sydor, M. A Method for Modeling the Individual Convenient Zone of a Human. Int. J. Environ. Res. Public Health 2022, 19, 10405.
- Parsons, G.G.; Carlson, A.A. Functional Beauty; Oxford University Press: Oxford, UK, 2009; p. 272. ISBN 9780191709296.
- Bonenberg, A.; Branowski, B.; Kurczewski, P.; Lewandowska, A.; Sydor, M.; Torzyński, D.; Zabłocki, M. Designing for Human Use: Examples of Kitchen Interiors for Persons with Disability and Elderly People. Hum. Factors Man. 2019, 29, 177–186.
- Agran, P.F.; Anderson, C.; Winn, D.; Trent, R.; Walton-Haynes, L.; Thayer, S. Rates of Pediatric Injuries by 3-Month Intervals for Children 0 to 3 Years of Age. Pediatrics 2003, 111, e683–e692.
- Reynolds, H.M. A Foundation for Systems Anthropometry: Phase 1; Highway Safety Research Institute, University of Michigan: Ann Arbor, MI, USA, 1977; p. 131.
- Veselovský, J.; Baďura, R. Slovakian Folk Wooden Cradle Design, Construction, Typology and Kinematics. Acta Fac. Xylologiae 2017, 59, 155–1666.
- Anderson, W. A Plea for Uniformity in the Delimitation of the Regions of the Abdomen. J Anat Physiol 1892, 26, 543–547.
- Ng, I.; Seow, E.; Lee, L.; Ho, L. Closed Head Injuries in Children Following the Use of a Sarong Cradle. Singapore Med. J. 1997, 38, 517–519.
- Moore, L.; Bourne, A.J.; Beal, S.; Collett, M.; Byard, R.W. Unexpected Infant Death in Association with Suspended Rocking Cradles. Am. J. Forensic Med. Pathol. 1995, 16, 177–180.
- Saha, A.; Batra, P.; Bansal, A. Strangulation Injury from Indigenous Rocking Cradle. J. Emerg. Trauma Shock 2010, 3, 298.
- Nimityongskul, P.; Anderson, L.D. The Likelihood of Injuries When Children Fall Out of Bed. J. Pediatr. Orthop. 1987, 7, 184–186.
- Lu, C.-H.; Luo, C.-H.; Chen, Y.-J.; Yeh, T.-F. An Automatic Swinging Instrument for Better Neonatal Growing Environment. Rev. Sci. Instrum. 1997, 68, 3192–3196.
- Ching-Hsing, L.; Cheng-Hsing, L.; Yung-Jung, C.; Tsu-Fuh, Y. Adaptive Cradle for the Neonatal Growth. In Proceedings of the 20th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Hong Kong, China, 1 November 1998; Volume 20, pp. 1803–1807.
- Burunkaya, M.; Güler, İ. Remote Control of Microcontroller-Based Infant Stimulating System. J. Med. Syst. 2000, 24, 131–140.
- Hu, Y.; Gui, W. Adaptive Sway Control for Baby Bassinet Based on Artificial Metabolic Algorithm. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 2426–2429.
- Bang, S.; Lam, R.; LoCicero, N. Rock Me Baby: The Automatic Baby Rocker; San Jose State University, Department of Mechanical and Aerospace Engineering: San Jose, CA, USA, 2011.
- Sudharsanan, S.; Karthikeyan, B. The Design of a Real-Time Accelerometer-Based Baby Sleeping Position Monitoring and Correction System. IJBET 2013, 12, 189.
- Chao, C.-T.; Wang, C.-W.; Chiou, J.-S.; Wang, C.-J. An Arduino-Based Resonant Cradle Design with Infant Cries Recognition. Sensors 2015, 15, 18934–18949.
- Bhatnagar, N.; Shinghal, K.; Saxena, A.; Tiwari, N.; Bhatnagar, S.; Kumar, S. Design of Automatic & Indigenous E-Cradle. Imp. J. Interdiscip. Res. 2016, 2, 328–333.
- Elmas, F.; Yilmaz, A.; Garip, M. Rocking Motion of the Baby Sleeping on the Mother’s Lap: Modeling and Prototype Automatic Swing Cradle Design. In Proceedings of the 2017 Electric Electronics, Computer Science, Biomedical Engineerings’ Meeting (EBBT), Istanbul, Turkey, 20 April 2017; pp. 1–4.
- Liu, Y.; Zheng, D.; Lin, T.; Liu, X.; Wang, D.; Hopfgartner, F. Smart Crib Control System Based on Sentiment Analysis. In Proceedings of the 2018 IEEE 16th Intl Conf on Dependable, Autonomic and Secure Computing, 16th Intl Conf on Pervasive Intelligence and Computing, 4th Intl Conf on Big Data Intelligence and Computing and Cyber Science and Technology Congress(DASC/PiCom/DataCom/CyberSciTech), Athens, Greece, 12 August 2018; pp. 222–229.
- Anish, M.N.; Ajith, T.G.; Ashraf, A.; Shaji, R.; Sangeetha, C. Infant Cry Detection Based On Artificial Neural Network for an Intelligent Baby Cradle. In Proceedings of the 2019 International Conference on Intelligent Computing and Control Systems (ICCS), Madurai, India, 5 May 2019; pp. 27–30.
- Jabbar, W.A.; Shang, H.K.; Hamid, S.N.I.S.; Almohammedi, A.A.; Ramli, R.M.; Ali, M.A.H. IoT-BBMS: Internet of Things-Based Baby Monitoring System for Smart Cradle. IEEE Access 2019, 7, 93791–93805.
- Nasimsha, N.; Kumar, G.M.; Rajalakshmi, T.; Gafoor, E.R. Automated Cradle with Incubator for Infants. Biomed. Eng. Appl. Basis Commun. 2020, 32, 2050037.
- Prusty, V.; Rath, A.; Biswal, P.K.; Rout, K.K. Internet of Things Based Smart Baby Cradle. In Innovative Data Communication Technologies and Application; Lecture Notes on Data Engineering and Communications Technologies; Raj, J.S., Bashar, A., Ramson, S.R.J., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 46, pp. 793–799. ISBN 978-3-030-38039-7.
- Duman, U.; Aydin, E. IoT Based Baby Cradle System with Real Time Data Tracking. In Proceedings of the 2020 5th International Conference on Computer Science and Engineering (UBMK), Diyarbakır, Turkey, 9 September 2020; pp. 274–279.
- Shahadi, H.I.; Muhsen, D.H.; Haider, H.T.; Taherinia, A.H. Design and Implementation of a Smart Baby Crib. IOP Conf. Ser. Mater. Sci. Eng. 2020, 671, 012050.
- Devi, R. Design and Development of IOT Based Baby Cradle. In Proceedings of the International Conference on Emerging Technologies: AI, IoT and CPS for Science & Technology Applications; CEUR Workshop Proceedings (CEUR-WS.org): Chandigarh, India, 2021; Volume 3058, p. 17.
- Pratap, N.L.; Anuroop, K.; Devi, P.N.; Sandeep, A.; Nalajala, S. IoT Based Smart Cradle for Baby Monitoring System. In Proceedings of the 2021 6th International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 20 January 2021; pp. 1298–1303.
- Malhotra, R.; Bansal, I.; Muskan; Sandhu, M. The Smart Anti COVID Cradle with Geometrical Interventions. In Proceedings of the AIP Conference Proceedings 2357; AIP Publishing: Rajpura, India, 2022; p. 100014.
- Kumar, V.S.; Pullagura, L.; Kumari, N.V.; Pooja Nayak, S.; Devi, B.P.; Alharbi, A.; Asakipaam, S.A. Internet of Things-Based Patient Cradle System with an Android App for Baby Monitoring with Machine Learning. Wirel. Commun. Mob. Comput. 2022, 2022, 1–11.
- Reyes-Galaviz, O.F.; Cano-Ortiz, S.D.; Reyes-García, C.A. Evolutionary-Neural System to Classify Infant Cry Units for Pathologies Identification in Recently Born Babies. In Proceedings of the 2008 Seventh Mexican International Conference on Artificial Intelligence, Mexico, Mexico, 27 October 2008; pp. 330–335.
- Saraswathy, J.; Hariharan, M.; Yaacob, S.; Khairunizam, W. Automatic Classification of Infant Cry: A Review. In Proceedings of the 2012 International Conference on Biomedical Engineering (ICoBE), Penang, Malaysia, 27 February 2012; pp. 543–548.
- Zamzmi, G.; Kasturi, R.; Goldgof, D.; Zhi, R.; Ashmeade, T.; Sun, Y. A Review of Automated Pain Assessment in Infants: Features, Classification Tasks, and Databases. IEEE Rev. Biomed. Eng. 2018, 11, 77–96.
- Ji, C.; Mudiyanselage, T.B.; Gao, Y.; Pan, Y. A Review of Infant Cry Analysis and Classification. J. Audio Speech Music Proc. 2021, 2021, 8.
- Gedliczka, A.; Pochopień, P. Atlas Miar Człowieka: Dane do Projektowania i Oceny Ergonomicznej: Antropometria, Biomechanika, Przestrzeń Pracy, Wymiary Bezpieczeństwa/Atlas of Human Measures: Data for Ergonomic Design and Assessment: Anthropometry, Biomechanics, Work Space, Safety Dimensions; Centralny Instytut Ochrony Pracy: Warszawa, Poland, 2001; ISBN 978-83-88703-38-6.
- Forczek, W.; Staszkiewicz, R. Changes of kinematic gait parameters due to pregnancy. Acta Bioeng. Biomech. 2012, 14, 113–119.
- Branco, M.; Santos-Rocha, R.; Aguiar, L.; Vieira, F.; Veloso, A. Kinematic Analysis of Gait in the Second and Third Trimesters of Pregnancy. J. Pregnancy 2013, 2013, 1–9.
- Carpentier, J.; Benallegue, M.; Laumond, J.-P. On the Centre of Mass Motion in Human Walking. Int. J. Autom. Comput 2017, 14, 542–551.
- Jansen, K.; De Groote, F.; Duysens, J.; Jonkers, I. How Gravity and Muscle Action Control Mediolateral Center of Mass Excursion during Slow Walking: A Simulation Study. Gait Posture 2014, 39, 91–97.
- Brownjohn, J.M.W.; Zheng, X. Discussion of Human Resonant Frequency. In Proceedings of the Second International Conference on Experimental Mechanics; Chau, F.S., Quan, C., Eds.; The International Society for Optical Engineering: Bellingham, WA, USA, 2001; Volume 4317, pp. 469–474.
- Lucas, L.K.; Ko, Y.H. Modelling of the Human Body Under the Exposure to Recumbent Whole-Body Vibration. IOP Conf. Ser. Mater. Sci. Eng. 2020, 815, 012015.
- Byrne, J.M.; Horowitz, F.D. Rocking as a Soothing Intervention: The Influence of Direction and Type of Movement. Infant Behav. Dev. 1981, 4, 207–218.
- Vrugt, D.T.; Pederson, D.R. The Effects of Vertical Rocking Frequencies on the Arousal Level in Two-Month-Old Infants. Child Dev. 1973, 44, 205.
- Thomas, S. Soothing Crying Babies and Preventing Shaken Baby Syndrome. Inter. J. Nurs. Educ. 2016, 8, 34.
- Provasi, J.; Blanc, L.; Carchon, I. The Importance of Rhythmic Stimulation for Preterm Infants in the NICU. Children 2021, 8, 660.
- Roach, J.A. Newborn Stimulation. Awhonn Lifelines 2003, 7, 530–535.
- Esposito, G.; Yoshida, S.; Ohnishi, R.; Tsuneoka, Y.; Rostagno, M.; Del Carmen Rostagno, M.; Yokota, S.; Okabe, S.; Kamiya, K.; Hoshino, M.; et al. Infant Calming Responses during Maternal Carrying in Humans and Mice. Curr. Biol. 2013, 23, 739–745.
- Berecz, B.; Cyrille, M.; Casselbrant, U.; Oleksak, S.; Norholt, H. Carrying Human Infants—An Evolutionary Heritage. Infant Behav. Dev. 2020, 60, 101460.
- Bornstein, M.H.; Putnick, D.L.; Suwalsky, J.T.D.; Rigo, P.; Esposito, G.; Swain, J.E.; Su, X.; Du, X.; Zhang, K.; Cot, L.R.; et al. Neurobiology of Culturally Common Maternal Responses to Infant Cry. In Parenting: Selected Writings of Marc H. Bornstein; World Library of Psychologists; Routledge: New York, NY, USA, 2022; p. 18. ISBN 978-1-00-316757-0.