Nowadays, more frequently, it is necessary to perform underwater operations such as surveying an area or inspecting and intervening on industrial infrastructures such as offshore oil and gas rigs or pipeline networks. The use of Autonomous Underwater Vehicles (AUV) has grown as a way to automate these tasks, reducing risks and execution time. One of the used sensing modalities is vision, providing RGB high-quality information in the mid to low range, making it appropriate for manipulation or detail inspection tasks. This research presents the use of a deep neural network to perform pixel-wise 3D segmentation of pipes and valves on underwater point clouds generated using a stereo pair of cameras. In addition, two novel algorithms are built to extract information from the detected instances, providing pipe vectors, gripping points, the position of structural elements such as elbows or connections, and valve type and orientation. The neural network and information algorithms are implemented on an AUV and executed in real-time, validating that the output information stream frame rate of 0.72 fps is high enough to perform manipulation tasks and to ensure full seabed coverage during inspection tasks. The used dataset, along with a trained model and the information algorithms, are provided to the scientific community.
- autonomous intervention
- underwater perception
- deep learning
1. Introduction
2. AUV Description
The used AUV is a SPARUS II model unit [11] (Figure 1) equipped with three motors, granting it three degrees of mobility (surge, heave and yaw). Its navigation payload is composed of: (1) a Doppler Velocity Logger (DVL) to obtain linear and angular speeds and altitude; (2) a pressure sensor which provides depth measurements; (3) an Inertial Measurement Unit (IMU) to measure accelerations and angular speeds; (4) a Compass for heading; (5) a GPS to be georeferenced during surface navigation; and (6) a Short Baseline acoustic Link (USBL) used for localisation and data exchange between the robot and a remote station. Additionally, it is equipped with a stereo pair of Manta G283 cameras facing downwards.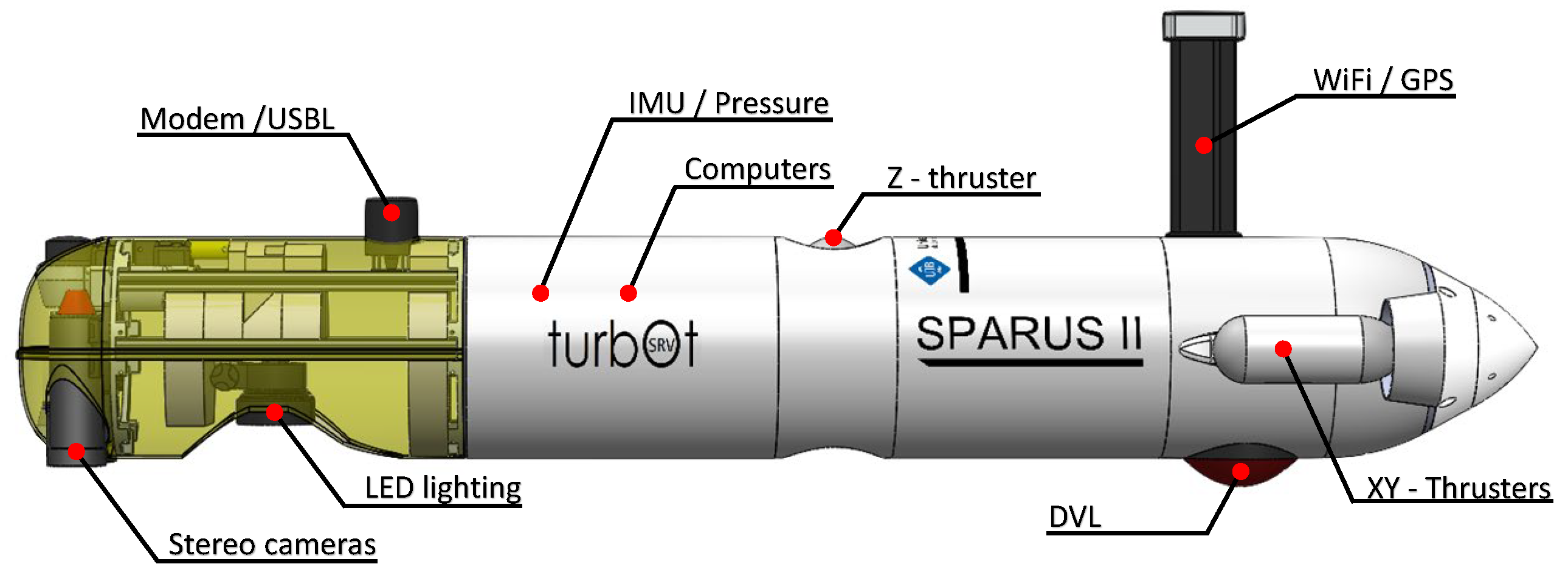
3. Implementation
To perform the online implementation the researchers design a pipeline based on ROS. First, the images published by the stereo pair are transformed into point clouds to be processed by the neural network. To do so, diverse C++ ROS nodes are set up to: (1) rectify the raw images using the camera calibration parameters; (2) decimate the rectified images from their original size (1920×1440 pixels) to 960×720 pixels; (3) calculate the disparity map and generate the point clouds; and (4) downsample the point clouds using a voxel grid. Additionally, a python ROS node is set up to subscribe to the downsampled point clouds. Following this, the point cloud is fed into a previously loaded inference graph of a DGCNN trained model, performing the semantic segmentation. From there, the IEA and IUA are executed. Finally, a publishing python ROS node is set up to publish the extracted information back into ROS to be accessed by other robots, sensors or actuators. This pipeline achieves the implementation of the semantic segmentation network and information algorithms on an AUV and allows its execution online during manipulation and inspection tasks.4. Validation
To validate the online execution, the frame rate of the output information stream is evaluated. An online execution was performed during the immersions conforming the SPOOL-2 and SSEA-3 sets. In total, the online workflow was tested for 15′23″. For each immersion, the inspected pipe and valve configuration are different, making the IEA and IUA algorithms execution time vary, as the number and shape of pipes and valves are different, making the time analysis more robust as it covers a wider variety of scenarios. The average output information stream frame rate and times for each online execution step are calculated as the mean value from both executions. Figure 2 presents a breakdown of the total average online execution time into its different steps.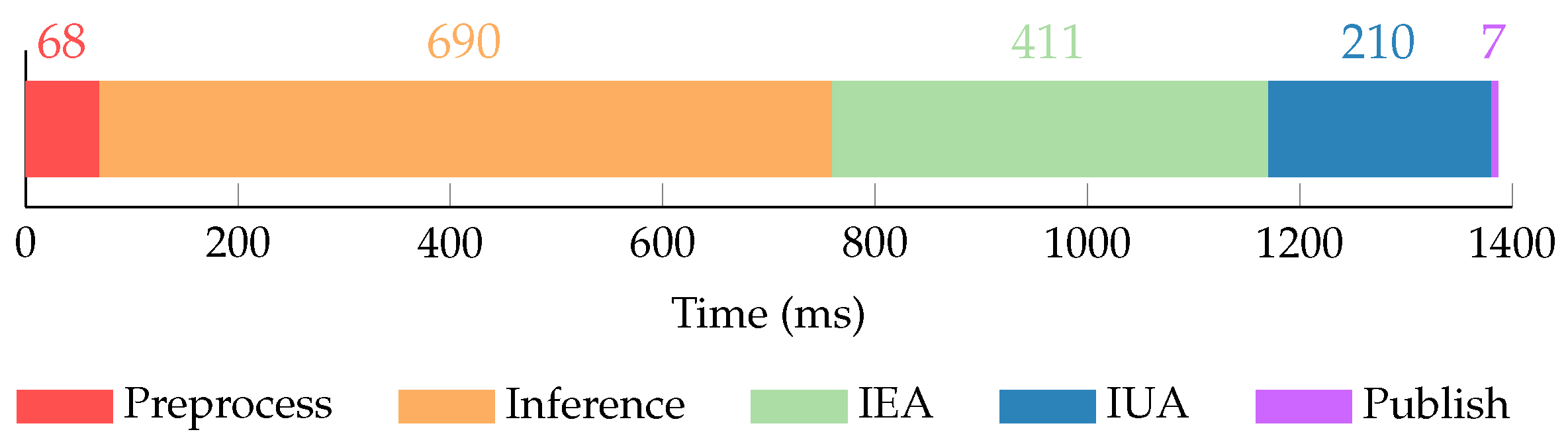
References
- Yu, M.; Ariamuthu Venkidasalapathy, J.; Shen, Y.; Quddus, N.; Mannan, M.S. Bow-tie Analysis of Underwater Robots in Offshore Oil and Gas Operations. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017.
- Costa, M.; Pinto, J.; Ribeiro, M.; Lima, K.; Monteiro, A.; Kowalczyk, P.; Sousa, J. Underwater Archaeology with Light AUVs. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–6.
- Asakawa, K.; Kojima, J.; Kato, Y.; Matsumoto, S.; Kato, N. Autonomous underwater vehicle AQUA EXPLORER 2 for inspection of underwater cables. In Proceedings of the 2000 International Symposium on Underwater Technology (Cat. No.00EX418), Tokyo, Japan, 26 May 2000; pp. 242–247.
- Jacobi, M.; Karimanzira, D. Underwater pipeline and cable inspection using autonomous underwater vehicles. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–6.
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13.
- Ridao, P.; Carreras, M.; Ribas, D.; Sanz, P.J.; Oliver, G. Intervention AUVs: The Next Challenge. Annu. Rev. Control 2015, 40, 227–241.
- Lodi Rizzini, D.; Kallasi, F.; Aleotti, J.; Oleari, F.; Caselli, S. Integration of a stereo vision system into an autonomous underwater vehicle for pipe manipulation tasks. Comput. Electr. Eng. 2017, 58, 560–571.
- Heshmati-Alamdari, S.; Nikou, A.; Dimarogonas, D.V. Robust Trajectory Tracking Control for Underactuated Autonomous Underwater Vehicles in Uncertain Environments. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1288–1301.
- Nikou, A.; Verginis, C.K.; Dimarogonas, D.V. A Tube-based MPC Scheme for Interaction Control of Underwater Vehicle Manipulator Systems. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6.
- Heshmati-Alamdari, S.; Bechlioulis, C.P.; Karras, G.C.; Nikou, A.; Dimarogonas, D.V.; Kyriakopoulos, K.J. A robust interaction control approach for underwater vehicle manipulator systems. Annu. Rev. Control 2018, 46, 315–325.
- Carreras, M.; Hernández, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV - A hovering vehicle for seabed inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355.
- Font, E.G.; Bonin-Font, F.; Negre, P.L.; Massot, M.; Oliver, G. USBL Integration and Assessment in a Multisensor Navigation Approach for field AUVs. Int. Fed. Autom. Control. (IFAC) 2017, 50, 7905–7910.