Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Camila Xu and Version 1 by Anton Kos.
Biomechanical feedback (BMF) is a treatment and body control method that uses sensors to measure a person’s physiological and physical body functions, parameters, and activities, including the ones that cannot be perceived by the human senses
- real-time
- concurrent
- biomechanical feedback
- system
- sensor
- actuator
- modality
- motion
- sport
- rehabilitation
1. Introduction
The use of smart devices and wearable technology in everyday life has increased considerably in the last decade [1,2,3,4][1][2][3][4]. This is also true in the field of sports and physical rehabilitation. In sports, professional and recreational athletes are constantly trying to improve their skills and performance by using advanced (wearable) technology, which can ultimately lead to a competitive advantage [5,6][5][6]. Similarly, in physical rehabilitation, patients use technology to shorten the rehabilitation process and improve its effectiveness [7].
A large number of electronic devices used in sports and physical rehabilitation are classified into three groups using terminology in the field of electronics: consumer devices, high-end devices and systems, and purpose-built devices and systems. Consumer devices include smart wristbands, heart rate monitors, smartwatches, smartphones, and many others. They usually contain various sensors, such as kinematic sensors to measure motion [8] and sensors to measure the physiological parameters of the user. Generally, users employ these devices to self-quantify their physical activity. Consumer devices are easy to use and predominantly provide some sort of statistical results, such as event counts, averages, progress, and the like. High-end devices and systems are primarily used for professional laboratory testing and research. They include optical tracking systems, force plate systems, video analysis systems, and others. They provide precise and accurate measurements of various activity parameters, such as movement patterns or force distribution, but their use is limited and restricted to specific tasks, environments, and experts; not to mention their high acquisition and operating costs. Purpose-built devices and systems attempt to bridge the gap between consumer and high-end devices and systems. In most cases, they are designed to be task-specific and implemented (at least in part) as wearable devices. They are used to assess the kinetics and kinematics of movement or physiological parameters of the user, preferably without interfering with the performance of the activity. In general, their use is more complex than consumer devices, which typically do not require a special setup, but are less complex than high-end systems, which may require a complicated setup and trained personnel. Purpose-built devices and systems using wearable technology enable task-specific acquisition of biomechanical and physiological parameters of activity. When compared to consumer or high-end devices, the task-specific data allows for targeted processing and analysis, resulting in higher quality results regarding the specific task. This ultimately increases rehabilitation benefits and training performance [9,10,11][9][10][11].
One concept that leads to improved execution of activity and performance, and thus a competitive advantage in sports or a better rehabilitation process, is biomechanical feedback (BMF) [2,5,6,7][2][5][6][7]. BMF is a treatment and body control method that uses sensors to measure a person’s physiological and physical body functions, parameters, and activities, including the ones that cannot be perceived by the human senses. The data from the sensors are processed and the results are fed back to the person via one of the human senses. The person tries to respond to the received information in order to change the sensed functions, parameters, and activities in the desired way, thus closing a feedback loop [2]. BMF systems generally consist of at least four basic elements: a user, one or more sensors, a processing unit, and one or more actuators, as shown in Figure 1. There can be more than one instance of each element [2].
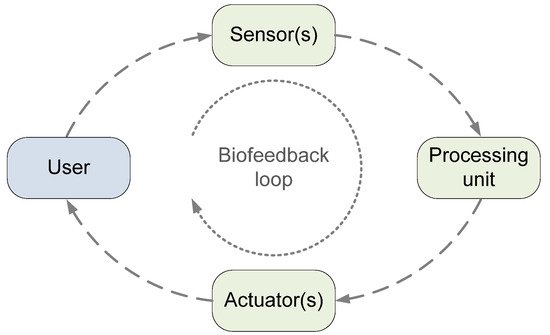
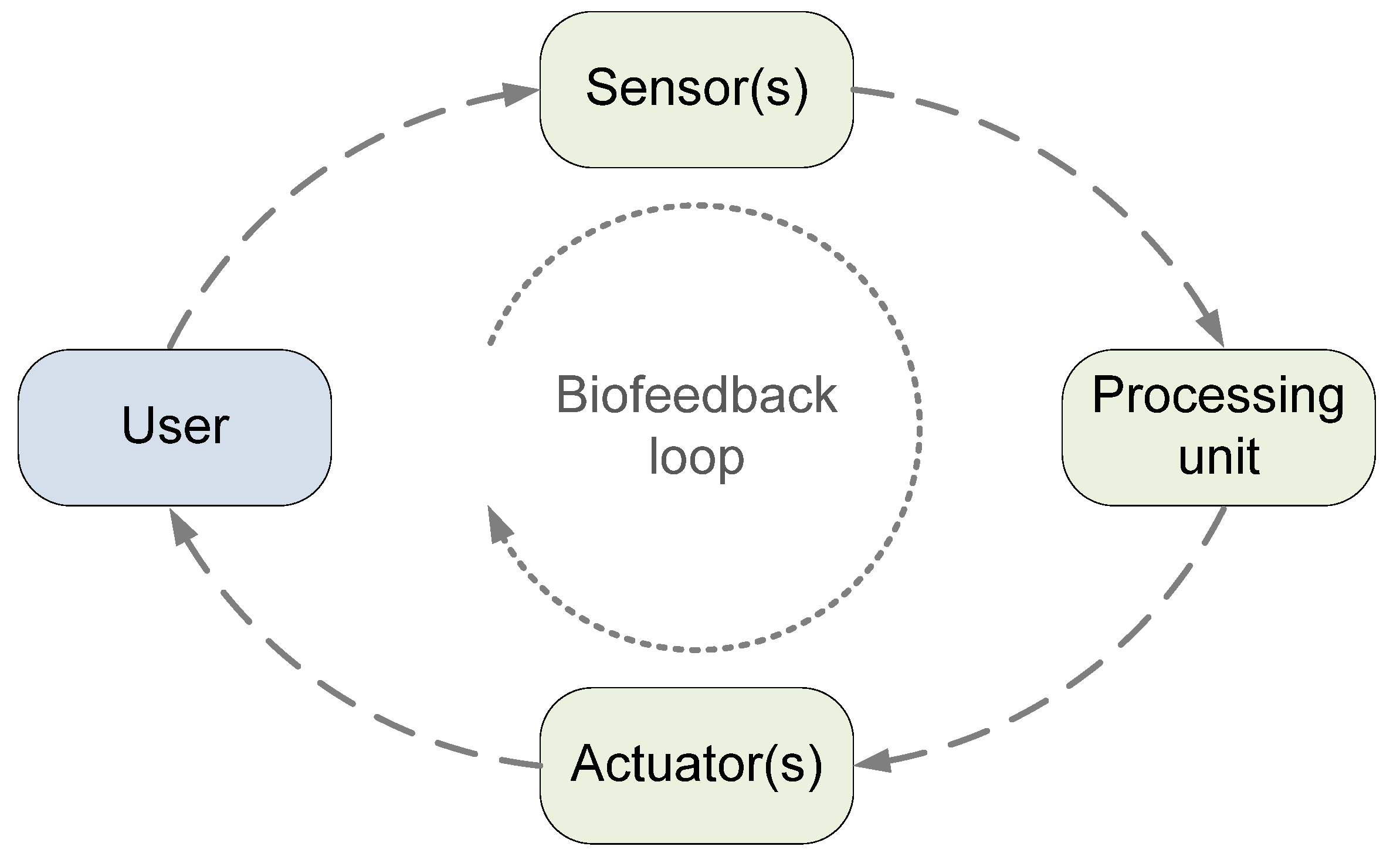 Figure 1. BMF system—Sensor(s) measure the user’s activity and send data to the processing unit. The processing unit analyses the data and generates feedback that is provided to the user via the actuator(s). The user responds to this feedback by correcting or changing their activity.
Figure 1. BMF system—Sensor(s) measure the user’s activity and send data to the processing unit. The processing unit analyses the data and generates feedback that is provided to the user via the actuator(s). The user responds to this feedback by correcting or changing their activity.
Different sensors that measure physiological or biomechanical parameters of the body [12] are used and studied in different applications in sports and physical rehabilitation [13]. The selection of the most suitable sensors depends strongly on the measured parameters and variables, the activity performed, and the intended use of the BMF system.
The processing unit receives signals and data from sensors and processes them. The type and operation of the processing unit depend on the processing requirements of the system. The sensor and the processing unit may be integrated into the same device or they may be implemented as two separate devices. In the latter case, they are usually wirelessly connected, but in certain cases, a wired connection is also used. Theoretically, there is no limit to the number of processing units; multiple computers may share the task of processing data, but this is usually not required. Some or all processing tasks can also be performed in the cloud. Currently, there is no need for devices with high processing power, and, in general, processing power is not an issue in application development, as microcontrollers and personal computers can perform almost all required tasks.
Feedback information must be meaningful and understandable to the user. It is provided in different modalities defined by stimulation of the human senses: auditory for sound, visual for sight, vibrotactile, or haptic for touch. The BMF system communicates with the user by presenting information through a variety of actuators such as visual displays, headphones or speakers, vibrating wristbands, or augmented reality glasses. It is very important to use the right type of modality—the feedback information should not interfere with modalities used to perform the activity and should not impose too much additional cognitive load. Nevertheless, different modalities can be used simultaneously or in the same application, but only under the conditions mentioned above.
In BMF systems, it is very important how early wresearchers provide the feedback information to the user in relation to the activity being performed. WeThe researchers understand the concept of timing from two perspectives: the user’s perspective and the system’s perspective. Users experience feedback in different modes: concurrent, cyclic, event-driven, and terminal. Concurrent feedback is provided throughout the duration of the activity. Cyclic feedback is given after the completion of a specific part or cycle of activity. Event-driven feedback is given to the user only at times when certain events (triggers) occur during the movement and when these events are significant to the user. Terminal feedback is given after the action. Feedback timing, from the perspective of the system, can be categorized into real-time or post-processing feedback. The understanding of what is real time varies in different domains. In BMF systems the notion of real-time depends on human perception of the operation of the system. The BMF system interacts with the user via feedback modality, and the user interacts with the system by changing motion that is detected by sensors. WeIt can assumed that a system operates in real time, if the user is not able to perceive the interaction as delayed or uncoordinated [14,15][14][15]. Depending on the stimulus (feedback modality), humans can normally perceive latencies between 25 ms (auditory and haptic) and 100 ms (visual) [14]. The total delay of the BMF loop includes the sum of delays of all BMF system elements and the communication between them. WeIt can be concluded that real-time BMF systems should operate under the above constraints to be effective and perceived as natural. Unlike real-time feedback, post-processing feedback is much easier to implement because there are no strict and rigid time constraints on when processing must be carried out. WRe focus on real-time BMF systemss is focused.
The implementation of real-time BMF systems and applications may vary in different sports or rehabilitation cases. A BMF system for aquatics sports may be quite different from a system for martial arts or a system for gait rehabilitation. However, similar or even the same systems can also be used in both sport and rehabilitation. For example, the same BMF system can be used in running practice and in gait rehabilitation. Additionally, Wi-Fi communication and smartphone display actuators are applicable in many cases in sports, but they are useless underwater. When designing BMF devices, obstructiveness is an important factor that limits the size, weight, type of communication, and operation of the device. The device should not restrict the user, should not obstruct the movement, and should be virtually imperceptible.
Sensors are often integrated into wearable sensor devices that contain a processor (i.e., a microcontroller), a battery, and a (wireless) communication module, allowing the sensor device to communicate with other devices such as computers, smartphones, or tablets. Wearable sensor devices must be small, lightweight, and should have sufficiently long autonomy. Signal and data processing and analysis are performed on a wearable device itself or sent to a computer or smart device. Digital signal processing techniques are used for analysis and feedback generation. The actuator must also communicate with the processing unit. It can use the same communication technology as the sensor or a different one. The choice of the actuator depends on the modality used. Auditory feedback can be provided to the athlete through headphones, speakers, or other acoustic devices. Visual feedback can be displayed on a screen or projector, via smart glasses or a VR/AR (virtual reality/augmented reality) headset. Vibrotactile feedback is typically generated with small haptic vibrators or piezoelectric elements. In some implementations, the sensor, processing unit, and actuator are integrated into the same device, such as smartwatches or smartphones.
2. Real-Time Biomechanical Feedback Systems in Sport and Rehabilitation
The development of BMF systems focuses on physical activity, and everything related to the technical components is guided by the principle that human movement should not be obstructed by the equipment used. If that is the case, the BMF systems can bring benefits and be useful for the user, otherwise, they can have opposite effects. Sensor, communication, and actuator technologies must be able to work in the desired environment; equipment for swimming studies must be different from that used for gait rehabilitation or running. However, both walking studies and running applications can use similar or the same system for assessing two different movements [33,36,88,100][16][17][18][19].
The same set of sensors is often used for balance training. Advanced use of a kinematic sensor is demonstrated in the dancing application [24][20], where complex motions are captured and used as an input for auditory feedback. Wearable sensors in the form of smart clothing and textiles [161][21] will probably be very interesting for BMF studies in the future. In observed studies [27,153][22][23], there are examples of sensors that can be used to assess whole-body activity, and these will evolve in the future into smart textiles that use optical fibers and strain sensors for motion sensing. The general trend in this area is toward wearable sensors [9] and smart sport equipment [3]. The placement of wearable sensors is of paramount importance, as only the sensor placed in the correct location on the body or equipment is able to detect the desired motion, which is, however, application-specific and cannot be generalized.
It is also worth noting that most papers use a sampling frequency of about 100 Hz. This frequency is suitable for capturing the majority of human movement patterns. Although, certain specific motions or events, such as impacts do require higher sampling frequencies, and with that more capable hardware [32,37,83][24][25][26]. The sampling frequency is also related to the communication bandwidth used. That is, if the devices cannot communicate faster and are limited in regard to data transmission, the sampling frequency can be reduced to compensate for the limitations of the hardware.
Sufficient processing power can be provided either by a remote device or by a wearable device. Basic digital signal processing techniques are currently used in the majority of studies, but researchers are already exploring machine learning techniques that can take advantage of potential information about the movement by learning different behavioral and motion patterns of the user.
There are different BMF system architectures depending on whether the application is intended as a tool for everyday use or if it is specifically used in a laboratory setting. If the BMF system is intended as an everyday wearable or training device, a compact solution in a single device is appropriate. However, if the system is intended for more precise and monitored rehabilitation or sports training, complex distributed systems may be used. As the BMF field evolves, more commercial end-user devices are expected to be available, and wresearchers expect them to implement a compact architecture.
An interesting research question of BMF systems is the feedback modality, where further studies are needed on the effects of the different modalities in different situations. Once the movement has been captured and processed, relevant information about the motion is returned to the user via a specific modality. This can be achieved in a variety of ways. Researchers should decide at the beginning of BMF system development what information they want to convey to the user and how they want to accomplish this. The complexity and presentation of feedback information can vary significantly between modalities. Most of the papers use visual feedback, which is not surprising as sight is a human’s primary sense. Visual information can be presented on a display and is, in most cases, self-explanatory to users, requiring minimal learning. On the other hand, auditory and haptic feedback require a certain amount of learning before use. Visual feedback can be provided primarily during stationary exercises in sports training or rehabilitation. One way to make visual feedback useful in wearable applications is through the use of augmented reality. Some rudimentary studies using augmented reality and virtual reality with head-mounted displays are also worth investigating [47,84,110[27][28][29][30],138], although more studies are needed in this area in the future. WeIt is believed that other, simpler modalities should be thoroughly investigated before exploring the possibilities of augmented reality. In most cases where mobility is required, both haptic [23,35,36,88,159][17][18][31][32][33] and auditory [24,33,37,44,105,113][16][20][25][34][35][36] feedback would be more appropriate.
References
- Lee, J.; Wheeler, K.; James, D.A. Wearable Sensors in Sport: A Practical Guide to Usage and Implementation; SpringerBriefs in Applied Sciences and Technology; Springer: Singapore, 2019; ISBN 9789811337765.
- Kos, A.; Umek, A. Biomechanical Biofeedback Systems and Applications; Springer: Cham, Switzerland, 2018; ISBN 978-3-319-91349-0.
- Lightman, K. Silicon Gets Sporty. IEEE Spectr. 2016, 53, 48–53.
- Baca, A.; Dabnichki, P.; Heller, M.; Kornfeind, P. Ubiquitous Computing in Sports: A Review and Analysis. J. Sports Sci. 2009, 27, 1335–1346.
- Pustišek, M.; Wei, Y.; Sun, Y.; Umek, A.; Kos, A. The Role of Technology for Accelerated Motor Learning in Sport. Pers. Ubiquitous Comput. 2019, 25, 969–978.
- Zhang, X.; Shan, G.; Wang, Y.; Wan, B.; Li, H. Wearables, Biomechanical Feedback, and Human Motor-Skills’ Learning & Optimization. Appl. Sci. 2019, 9, 226.
- Giggins, O.M.; Persson, U.M.; Caulfield, B. Biofeedback in Rehabilitation. J. Neuroeng. Rehabil. 2013, 10, 60.
- Kos, A.; Tomažič, S.; Umek, A. Suitability of Smartphone Inertial Sensors for Real-Time Biofeedback Applications. Sensors 2016, 16, 301.
- Heikenfeld, J.; Jajack, A.; Rogers, J.; Gutruf, P.; Tian, L.; Pan, T.; Li, R.; Khine, M.; Kim, J.; Wang, J.; et al. Wearable Sensors: Modalities, Challenges, and Prospects. Lab Chip. 2018, 18, 217–248.
- Van Hooren, B.; Goudsmit, J.; Restrepo, J.; Vos, S. Real-Time Feedback by Wearables in Running: Current Approaches, Challenges and Suggestions for Improvements. J. Sports Sci. 2020, 38, 214–230.
- Aroganam, G.; Manivannan, N.; Harrison, D. Review on Wearable Technology Sensors Used in Consumer Sport Applications. Sensors 2019, 19, 1983.
- Freedson, P.S.; Miller, K. Objective Monitoring of Physical Activity Using Motion Sensors and Heart Rate. Res. Q. Exerc. Sport 2000, 71, 21–29.
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873.
- Attig, C.; Rauh, N.; Franke, T.; Krems, J. System Latency Guidelines Then and Now—Is Zero Latency Really Considered Necessary? In International Conference on Engineering Psychology and Cognitive Ergonomics; Springer: Cham, Switzerland, 2017; pp. 3–14.
- Amano, K.; Goda, N.; Nishida, S.; Ejima, Y.; Takeda, T.; Ohtani, Y. Estimation of the Timing of Human Visual Perception from Magnetoencephalography. J. Neurosci. 2006, 26, 3981–3991.
- Cheung, R.T.H.; Davis, I.S. Landing Pattern Modification to Improve Patellofemoral Pain in Runners: A Case Series. J. Orthop. Sports Phys. 2011, 41, 914–919.
- Sheerin, K.R.; Reid, D.; Taylor, D.; Besier, T.F. The Effectiveness of Real-Time Haptic Feedback Gait Retraining for Reducing Resultant Tibial Acceleration with Runners. Phys. Sport 2020, 43, 173–180.
- Ma, C.Z.-H.; Zheng, Y.-P.; Lee, W.C.-C. Changes in Gait and Plantar Foot Loading upon Using Vibrotactile Wearable Biofeedback System in Patients with Stroke. Top Stroke Rehabil. 2018, 25, 20–27.
- Khoo, I.-H.; Marayong, P.; Krishnan, V.; Balagtas, M.; Rojas, O.; Leyba, K. Real-Time Biofeedback Device for Gait Rehabilitation of Post-Stroke Patients. Biomed. Eng. Lett. 2017, 7, 287–298.
- Grosshauser, T.; Blaesing, B.; Spieth, C.; Hermann, T. Wearable Sensor-Based Real-Time Sonification of Motion and Foot Pressure in Dance Teaching and Training. J. Audio Eng. Soc. 2012, 60, 580–589.
- Mokhlespour Esfahani, M.I.; Nussbaum, M.A. Preferred Placement and Usability of a Smart Textile System vs. Inertial Measurement Units for Activity Monitoring. Sensors 2018, 18, 2501.
- Koyama, Y.; Nishiyama, M.; Watanabe, K. Self Sports Motion Instruction System with Auditory Feedback Using Multi-Function Hetero-Core Fiber Optics. IEEJ Trans. Sens. Micromach. 2016, 136, 55–64.
- Caviedes, J.E.; Li, B.; Jammula, V.C. Wearable Sensor Array Design for Spine Posture Monitoring During Exercise Incorporating Biofeedback. IEEE Trans. Biomed. Eng. 2020, 67, 2828–2838.
- Clansey, A.C.; Hanlon, M.; Wallace, E.S.; Nevill, A.; Lake, M.J. Influence of Tibial Shock Feedback Training on Impact Loading and Running Economy. Med. Sci. Sports Exerc. 2014, 46, 973–981.
- Van den Berghe, P.; Gosseries, M.; Gerlo, J.; Lenoir, M.; Leman, M.; de Clercq, D. Change-Point Detection of Peak Tibial Acceleration in Overground Running Retraining. Sensors 2020, 20, 1720.
- Redd, C.B.; Bamberg, S.J.M. A Wireless Sensory Feedback Device for Real-Time Gait Feedback and Training. IEEE-Asme Trans. Mechatron. 2012, 17, 425–433.
- Kuwahara, T.; Takahashi, I.; Harikae, S. Real-Time Snowboard Training System for a Novice Using Visual and Auditory Feedback. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 4230–4235.
- Held, J.P.O.; Yu, K.; Pyles, C.; Veerbeek, J.M.; Bork, F.; Heining, S.-M.; Navab, N.; Luft, A.R. Augmented Reality-Based Rehabilitation of Gait Impairments: Case Report. JMIR Mhealth Uhealth 2020, 8, e17804.
- Karatsidis, A.; Richards, R.E.; Konrath, J.M.; van den Noort, J.C.; Schepers, H.M.; Bellusci, G.; Harlaar, J.; Veltink, P.H. Validation of Wearable Visual Feedback for Retraining Foot Progression Angle Using Inertial Sensors and an Augmented Reality Headset. J. Neuroeng. Rehabil. 2018, 15, 78.
- Stanica, I.-C.; Moldoveanu, F.; Portelli, G.-P.; Dascalu, M.-I.; Moldoveanu, A.; Ristea, M.G. Flexible Virtual Reality System for Neurorehabilitation and Quality of Life Improvement. Sensors 2020, 20, 6045.
- Peeters, T.; Vleugels, J.; Garimella, R.; Truijen, S.; Saeys, W.; Verwulgen, S. Vibrotactile Feedback for Correcting Aerodynamic Position of a Cyclist. J. Sports Sci. 2020, 38, 2193–2199.
- Fiorentino, M.; Uva, A.E.; Foglia, M.M. Self Calibrating Wearable Active Running Asymmetry Measurement and Correction. Control. Eng. Appl. Inform. 2011, 13, 3–8.
- Ashapkina, M.S.; Alpatov, A.V.; Sablina, V.A.; Melnik, O.V. Vibro-Tactile Portable Device for Home-Base Physical Rehabilitation. In Proceedings of the 2021 10th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 7–10 June 2021; pp. 1–4.
- Godbout, A.; Boyd, J.E. Rhythmic Sonic Feedback for Speed Skating by Real-Time Movement Synchronization. Int. J. Comput. Sci. Sport 2012, 11, 37–51.
- Horsak, B.; Dlapka, R.; Iber, M.; Gorgas, A.-M.; Kiselka, A.; Gradl, C.; Siragy, T.; Doppler, J. SONIGait: A Wireless Instrumented Insole Device for Real-Time Sonification of Gait. J. Multimodal User Interfaces 2016, 10, 195–206.
- Biesmans, S.; Markopoulos, P. Design and Evaluation of SONIS, a Wearable Biofeedback System for Gait Retraining. Multimodal Technol. Interact. 2020, 4, 60.
More