In the early stages of fruit-harvesting robotic arms, the designs were rudimentary, with basic grippers and single-axis movements characterizing their mechanical form
[24][25][26][27,28,29]. These early arms lacked adaptability to different fruit shapes and sizes, leading to a quest for more sophisticated solutions
[27][30]. As the years progressed, a breakthrough came with the introduction of multi-axis movement, granting these robotic arms greater flexibility and reach
[28][31]. The incorporation of force sensors and vision systems marked another milestone, enabling the arms to delicately handle fruits and precisely locate them within their environment
[29][32]. However, it was the 2010s that saw a true revolution in gripper design. Adaptive grippers emerged, their flexible fingers and suction cups adapting seamlessly to a variety of fruit shapes
[30][31][32][33][33,34,35,36]. Soft grippers, employing compliant materials, further improved interactions, reducing the risk of damage. In the subsequent years, advanced materials and electromagnetic actuators transformed the landscape, making arms lightweight, energy-efficient, and precise. The hybrid gripper systems of the 2020s brought a new level of versatility, combining different gripping mechanisms for enhanced fruit handling. Simultaneously, artificial intelligence emerged as a key player, empowering these arms with real-time decision-making capabilities
[34][35][36][37,38,39]. Through specialized attachments and end-effectors, from gentle suctions for delicate fruits to cutting tools for stalked ones, these robotic arms evolved into versatile, indispensable tools in fruit harvesting
[37][38][39][40,41,42]. Ergonomics and safety considerations also received due attention, ensuring that these mechanical marvels not only excelled in function but also in user-friendly operation. The design of the fruit-harvesting robotic arm is one of continuous innovation, driven by a quest for precision, adaptability, and efficiency, ultimately reshaping the landscape of agricultural practices.
Researchers have made significant strides in addressing the challenge of localizing fruits in fruit-harvesting robotic arms since the last century
[40][43]. Before the 2000s, research in the field of fruit-harvesting robotic arms faced significant challenges in localizing fruits due to the limited availability of advanced technology
[41][44]. Their efforts primarily focused on rudimentary methods of fruit detection and localization. One of the earliest approaches involved basic computer vision techniques. Researchers developed algorithms to analyze 2D images of fruit-bearing trees
[42][43][44][45,46,47]. These algorithms relied on color-based segmentation and shape recognition to identify potential fruit locations
[45][46][48,49]. However, this method had limitations, especially in varying lighting conditions and with occluded or partially hidden fruits.
Another approach was the use of ultrasonic sensors
[47][48][50,51]. These sensors emitted high-frequency sound waves and measured the time taken for the waves to bounce back after hitting an object. Although they were effective in detecting obstacles, they were less precise in identifying individual fruits. Furthermore, some researchers explored the use of infrared sensors to detect temperature variations associated with ripe fruits
[49][52]. This approach, however, had limited success, as factors like ambient temperature and humidity could affect the readings. Researchers also experimented with mechanical contact-based systems. These systems involved probes or robotic arms that physically touched fruits to assess their ripeness
[50][53]. Although this approach could provide valuable information, it was not suitable for delicate fruits or those in high-density clusters. Initially, in the early 2000s, the focus was on basic computer vision techniques for fruit recognition. This involved developing algorithms to detect and identify fruits based on color, shape, and texture. As technology advanced, researchers began integrating more sophisticated sensing systems, such as multi-spectral imaging, which allowed for a more detailed analysis of fruit characteristics. This enabled the robots to distinguish between ripe and unripe fruits with higher accuracy. In the mid-2010s, the implementation of depth sensors marked a crucial advancement. These sensors provided precise information about the location of fruits in three-dimensional space, allowing for more accurate localization
[51][52][53][54,55,56]. Additionally, force feedback systems were introduced to ensure the gentle handling of delicate fruits during the harvesting process
[35][38]. A significant breakthrough came with the introduction of machine learning algorithms around 2013. These algorithms enabled the robotic systems to learn and adapt to different fruit varieties and environmental conditions, enhancing their ability to accurately identify and localize fruits
[54][55][56][57][57,58,59,60]. By 2015, researchers had achieved simultaneous multi-fruit harvesting capability, a milestone that greatly increased the efficiency of fruit harvesting robots
[58][61]. Furthermore, the development of robotic arms with multiple degrees of freedom allowed for more flexible and precise manipulation, further improving localization accuracy. In recent years, advancements in artificial intelligence (AI) have played a pivotal role. Integration of AI algorithms has enabled real-time assessment of fruit ripeness, allowing the robots to make decisions on the spot. Edge computing, introduced around 2021, further enhanced the speed and efficiency of AI processing directly on the robot, reducing reliance on external computational resources
[59][62]. Furthermore, the integration of LiDAR technology has provided the capability for 3D mapping of orchard terrain. This allows robots to navigate and localize fruits in complex and dynamic environments
[60][61][63,64]. Overall, researchers have employed a combination of computer vision, sensor technologies, machine learning, and AI algorithms to progressively refine the localization capabilities of fruit harvesting robots. These advancements have not only improved the efficiency and accuracy of fruit harvesting but also have the potential to revolutionize the agricultural industry by addressing labor shortages and increasing productivity.
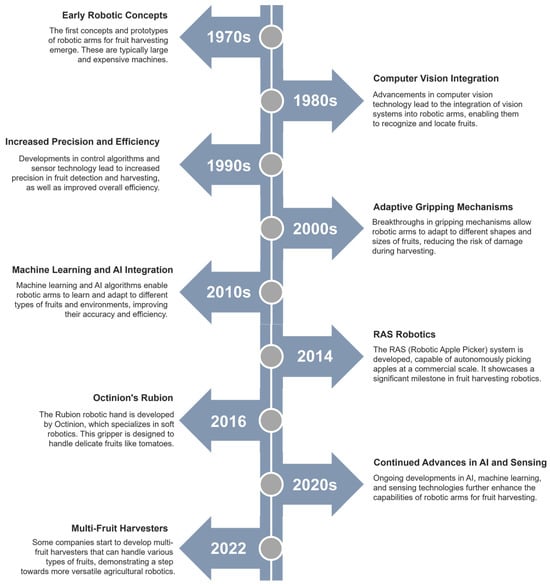
Figure 1 shows the timeline of the significant contributions to the design and development of fruit-harvesting robotic arms in decades. It can be seen that there has been a major contribution to its development in the recent decade due to its growing demand in the agricultural sector.
Figure 1.
Timeline showing significant contributions in fruit-harvesting robotic arms development.
An autonomous robotic arm developed by for apple harvesting that comprises a custom-made end-effector. A Pentium IV 2 GHz PC with 1 GB RAM, Panasonic VR006L robotic arm, tractor, generator, and touch panel PC with HMI are used in the manufacturing of a prototype.
Huang
[62][65] developed a robotic arm with a path-planning plate form simulated in MATLAB. Their focus is to find a solution for the end-effector harvester to reach its destination with high precision by implementing an inverse kinematics technique.
Another low-cost prototype for a fruit harvester is designed by
[63][66] using a stereo vision camera. The vision system is installed in the end-effector so that the updated information related to arm movement is sent to the controller for further necessary actions. The complete prototype is constructed using Minoru 3D for the vision system, DC gear motors, 3D printed arm parts using dimension SST 1200es, 3D printer, and an STM32F407VGT6 controller.
It is observed from the literature the main key issues are due to achieving low harvesting time, which was examined by
[64][67]. A low-cost, high-speed robotic apple harvester has been proposed, which boasts the ability to sense, plan, and harvest. The entire prototype is mounted on a John Deere Gator electric utility vehicle and comprises a manipulator, custom-made end-effectors, TOF camera, and color camera. The detection of objects (apples in this case) is achieved using circular Hough transformation (CHT) and blob analysis (BA) techniques.
An autonomous sweet pepper recognition and tracking system has been developed using a simulation approach
[65][68]. The simulation is carried out using MATLAB, V-REP, and ROS software for analysis. The algorithms are executed in MATLAB, and the real-time images captured by an external camera are filtered to remove color noise. The system’s performance was evaluated using 78 images.
A real-time image processing algorithm is used to determine the location of fruit, and their kinematic solution is obtained using C#
[66][69]. A mechanical custom-made end-effector is developed to detach the fruit, and the pressure required for the desired fruit is calculated precisely by determining the tolerable pressure. Visual tasks are carried out using a two-dimensional camera with the addition of a depth sensor. The results were validated using 100 images, demonstrating an acceptable level of accuracy in fruit localization and harvesting.
A geometrical solution that can transform the exact location of peduncle coordinates into robotic arm joint functions using a Convolutional Neural Network (CNN) is validated
[67][70]. Kinect RGB-Depth camera is mounted on the robot for real-time image processing. The result validation shows a harvested success rate of about 52%.
Another robotic arm harvesting prototype based on deep learning techniques implemented for fruit harvesting and recognition are Point Net-based and Mobile-DasNet, respectively, which is designed in
[68][71]. The complete prototype is customized using a Universal Robotic manipulator UR5, self-design end-effector, intel D-435 depth camera, and NVIDIA GTX-1070 GPU.
Feng incorporated laser technology into an apple-harvesting robot
[69][72]. A laser vision system that allows the robot to accurately measure the distance to the target. This laser vision system enables the robot to perform a three-dimensional scan of the target scene, capturing detailed spatial geometry information and analyzing the relationship between the fruits and branches.
An integrated prototype is designed in
[70][73], whose testing and validation are carried out in the greenhouse. The whole system is implemented by acquiring six Degree of Freedom (DOF) robotic arms, a Fotonic F80 depth camera, GPU, and PLC. The software counterpart in this model consists of C++ and ROS indigo on Ubuntu. Although attractive work is carried out, it has several drawbacks in terms of harvest success rate and detachment time.
A novel apple harvesting robot end effector that incorporates a pneumatic flexible actuator as a curved joint is created in
[71][74]. This innovative design allows for a substantial output force, enabling the end effector to firmly grasp the target fruit with excellent flexibility. This breakthrough development has the potential to significantly enhance the efficiency and effectiveness of apple harvesting processes.
A localization-based detection and fruit harvesting prototype is prepared in
[72][75] with a custom cutting mechanism. The proposed system contains a Braccio robotic arm, depth camera, and Arduino Due controller. The software part is established using MATLAB and Arduino IDE environment. The prototype has several limitations in terms of performance, and the system is not fully automated because, during testing, it requires some manual modification.
A closed-range vision-based chili harvesting robot with a custom end-effector is designed in
[49][52]. The proposed manipulator detaches the chili using a suction and grasping mechanism. To minimize fruit damage, the detachment process is developed the same as manual harvesting. The prototype contains a laser diode, a laser receiver
[73][76], five DOF manipulators, and a computer. The drawback of this design is a single trunk training model that works only on aligning a single trunk, so this type of prototype is not used for harvesting in a field environment.
Zhang designed a manipulator for an apple-picking robot and conducted experiments to study the control stability of the manipulator
[74][77]. The control area was divided into a stretching area and a harvesting area to ensure smooth operation. The trial showed that once the robot ranges the target, the required stabilization time is less than two seconds. This suggests that the manipulator’s control system is stable and capable of quickly stabilizing once it reaches the harvesting area.
Another designed prototype for an automated mushroom harvester is proposed in
[75][78]. Special custom end-effectors are designed for the delicate control of mushrooms. The algorithm developed for localizing and identification of mushrooms is based on the calculated area of the mushroom top. The maximum diameter of the mushroom top harvested by the system is 75 mm. To solve the problem of low lightning conditions, a Phillips TLE 23Watt bulb is used near end-effectors to maintain a better environment for target identification by the vision system. The calculated damage rate claim by the author during the testing of the developed prototype is 3%.
Zhao has developed a robot for apple harvesting that features a 5° series joint with an integrated arm that has both lifting and telescopic capabilities
[76][79]. The robot’s performance was tested under controlled laboratory conditions, resulting in an 80% success rate, with a harvesting period of 15 s.
An Automated Robotic arm for the orange harvester was developed in
[77][80]. The vision system for fruit identification is composed of two cameras (ZED Stereo camera and A4tecch Webcam) and one ultrasonic sensor. A stereo camera is used to detect orange trees by applying a green detection algorithm. A webcam is used to serve the end-effector to reach the fruit, and an ultrasonic sensor is used for the distance measurement of the fruit from the end-effector.
The intelligent fruit-harvesting robot designed by Gu was equipped with advanced technologies such as autonomous navigation, computer vision, and robotic arm control
[78][81]. The robot was able to autonomously navigate through the orchard using sensors and algorithms to detect obstacles and plan its path. It could identify mature fruits using computer vision algorithms with a high recognition rate in the field of agricultural robotics.
Most of the above developments show that the basic aim of their work is the successful harvesting of fruit using an optimal detachment mechanism. Results claimed by the manufacturer in the previous developments are shown in
Table 1.
It is observed from previous work that harvesting time, harvesting success rate, and localization success rate are the main focused parameters that are discussed by the authors in the literature. The harvesting cycle is the period for the detachment of a single fruit that starts from the initial manipulator movement to the successful reach of the fruit to the container. The localization success rate is the ratio of the total number of available fruits and detected fruits by the vision systems. Harvesting success rate is the ratio of total number of fruits harvested and the number of fruits detected by the system.