 +1 credit
+1 credit
Video Upload Options
Based on the ingenious design and distinguished performance of the reported flexible strain sensors, there are a great deal of applications that have been demonstrated for various occasions. The in vitro detections for human health and implantable in vivo devices for biomedical engineering, as well as human-machine interface and soft robotics applications are reviewed.
1. Human Motion Detection and Biomedical Health Monitoring
The variation of electrical signals against the applied strain of the flexible strain sensors brings plenty of applications on wearable and skin-mountable electronics from the body, top to bottom. Figure 1 shows the reported sensors demonstrated in different parts of the human body. For monitoring eyeball movement, porous graphene fibers have been demonstrated and moved into a gauze as strain sensors for the detection of eyeball rotation and eyelid blinking [1]. Our group proposed a highly sensitive strain sensor for sensing of facial muscle stretch [2]. In addition, other low strain motions, such as swallowing, [3][4][5] voice vibrations, [6][7][8] pulsing, [9][10] blowing, [11][12] and neck joint motion [13][14] biomedical test have also been presented by different composites. On the other hand, large strain movements, including finger [15][16] and knee bending [17][18], wrist [19] and elbow motions [20][21], plantar distribution [22], respiration rate [23], and some derived sports behaviors requires high stretchability and better sensitivity of the sensors. For example, a strain sensor with multidirectional sensing capability and high GF value of 180 has been introduced based on carbon nanofiber-PDMS composites [24]. The highly aligned structure of carbon nanofibers exhibited different morphological changes and distinct electrical resistance changes in different loading directions. Besides those applications on human body, the growth of a bamboo plant was monitored using a PEDOT:PSS-based strain sensor. The grew up by 2 cm during the 4 days monitoring of bamboo was studied, which subtly revealed the higher growth rate at night and peaked at midnight. Generally, combined with signal processing and output circuit on flexible board, the real-time monitoring of human motions for evaluating of sport performances and biomedical demonstrations of wearable and skin-mountable electronics show tremendous application potential in the future.
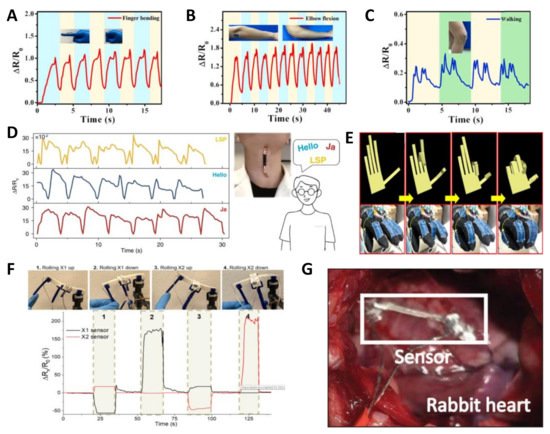
Figure 6. (A–C) The application for strain sensor used in human motion detection (finger bending and releasing, elbow flexion, walking). Reproduced with the permission from [25], copyright the Elsevier B.V., 2020. (D) Sensing application of the strain sensor when monitoring speaking different words with sample fixing at neck. Reproduced with the permission from [26], copyright the Springer Nature, 2021. (E) Control of avatar fingers in the virtual environment using wireless smart glove system. Reproduced with the permission from [27], copyright the ACS Publications, 2014. (F) Four types of actuations were applied to the actuator, proving the capability of multidirectional bending detection. Reproduced with the permission from [11], copyright the ACS Publications, 2020. (G) The fabricated sensor on the surface of a beating heart of a rabbit by the liquid-metal-based cardiac patch. Reproduced with the permission from [28], copyright the Wiley Online Library, 2019.
2. Implantable Devices
For implantable electronics and devices, higher standards are required due to the complicated and variable internal environment. Stability, non-poisonous, biocompatible, flexibility, and conformity are some basic characters for bioinert implant strain sensors. Toward real-time monitoring of bladder volume, a novel soft conductor (gold-coated titanium dioxide nanowire layers embedded in an ultrasoft silicone elastomer) with high cyclic stability and a strain sensor with a chipless wireless readout was presented by János Vörös’ group [29]. The mechanical properties of designed strain sensing elements are similar with the tissue, which is vital to avoid interference signals. Additionally, the distinct linearity was observed when the bladder volume above 95 mL. Besides, a buckled sheath–core fiber composed of CNTs and thermal plastic elastomer was reported as an implantable device, which attached on the tendon of a lab rat for real-time quantitative assessment of tendon rehabilitation [30]. By calculating the defined angle, the sensing signals versus variation of the angle reflect the loaded force from the muscle to the ankle, which is helpful to guide rehabilitation training.
In addition to the above-mentioned implantable applications, cardiac health detection and time treatment are other key missions for flexible electronics and devices. To this end, great efforts have been made seeking effective approaches and materials. In order to calculate the pressure between 3D multifunctional integumentary membranes (3D-MIM) and the heart with arbitrary shape for organs, a universal and easy-to-use model was established by Su et al. [31] They found the average pressure is insensitive to the frication and delamination between 3D-MIM and the heart by finite element analysis (Figure 1). Park et al. developed an epicardial mesh consisted of ligand exchanged AgNWs and Styrene-butadiene-styrene (SBS) rubber to resemble the innate cardiac tissue and confer cardiac conduction system function, to enable electromechanical cardioplasty [32]. The excellent contractility and conductivity ensured the reliable electrical signal detection and rational electrical shock. Through theoretical estimation and practical test on rat heart, the authors proved the improved systolic function without impeded ventricular relaxations. Besides, Au coated epicardial mesh showed the same effective functions and biocompatibility. Also for this purpose, other 3D-MIMs were proposed by using different approaches (such as 3D printing [33]) and materials (such as Ag-Au core-sheath nanowire composite [34]), which were multi-functional electronics. Overall, the further development of flexible sensing materials will promote greater development of the implantable electronics and devices with real-time monitoring and immediate treatment beyond functions.
3. Human-Machine Interface and Virtual Reality Technology
Flexible strain sensors could be able to detect the finger bending based on the changes of electrical signals. By further development of human-machine interfaces, the changed electrical signals can be transferred to smart devices or robots, and synchronously control the actions of that equipment. For example, a smart glove system was fabricated by integrating AuNWs/PANI strain sensors with wireless devices [35]. The remote control of a robotic arm to pick up and put down the target object kept the risks away from people. Recently, a group of tactile sensors using piezoresistive foams was proposed and mounted to each finger of the 3D printed gripper, [36] the state of each sensor was displayed by virtual LED when the gripper works and releasing. Moreover, combined with the concept of “second skin” for human motor assistance raised by Eugene C. Goldfield et al., [37] those reported sensors could be widely carried forward in the field of soft robots and remote manipulation requirement. For emerged virtual reality technology, flexible strain sensors were utilized as an interactive drive to control the finger motion of an avatar in the computer virtual environment [38]. As shown in Figure 1, the synchronized actions of finger bending were achieved in reality and virtual environment. This technology is beneficial to rehabilitation engineering and entertainment demand.
References
- Zhao, Y.; Ren, M.; Shang, Y.; Li, J.; Wang, S.; Zhai, W.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Ultra-sensitive and durable strain sensor with sandwich structure and excellent anti-interference ability for wearable electronic skins. Compos. Sci. Technol. 2020, 200, 108448.
- Wang, X.; Liu, X.; Schubert, D.W. Highly Sensitive Ultrathin Flexible Thermoplastic Polyurethane/Carbon Black Fibrous Film Strain Sensor with Adjustable Scaffold Networks. Nano-Micro Lett. 2021, 13, 1–19.
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire-Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163.
- Mousavi, S.; Howard, D.; Zhang, F.; Leng, J.; Wang, C.H. Direct 3D Printing of Highly Anisotropic, Flexible, Constriction-Resistive Sensors for Multidirectional Proprioception in Soft Robots. ACS Appl. Mater. Interfaces 2020, 12, 15631–15643.
- Liu, Y.; Yang, T.; Zhang, Y.; Qu, G.; Wei, S.; Liu, Z.; Kong, T. Ultrastretchable and Wireless Bioelectronics Based on All-Hydrogel Microfluidics. Adv. Mater. 2019, 31, 1902783.
- Chen, S.; Wei, Y.; Yuan, X.; Lin, Y.; Liu, L. A highly stretchable strain sensor based on a graphene/silver nanoparticle synergic conductive network and a sandwich structure. J. Mater. Chem. C 2016, 4, 4304–4311.
- Wang, Y.; Yang, T.; Lao, J.; Zhang, R.; Zhang, Y.; Zhu, M.; Li, X.; Zang, X.; Wang, K.; Yu, W.; et al. Ultra-sensitive graphene strain sensor for sound signal acquisition and recognition. Nano Res. 2015, 8, 1627–1636.
- Yin, B.; Liu, X.; Gao, H.; Fu, T.; Yao, J. Bioinspired and bristled microparticles for ultrasensitive pressure and strain sensors. Nat. Commun. 2018, 9, 5161.
- Xu, H.; Lv, Y.; Qiu, D.; Zhou, Y.; Zeng, H.; Chu, Y. An ultra-stretchable, highly sensitive and biocompatible capacitive strain sensor from an ionic nanocomposite for on-skin monitoring. Nanoscale 2019, 11, 1570–1578.
- Gao, Y.; Li, Q.; Wu, R.; Sha, J.; Lu, Y.; Xuan, F. Laser Direct Writing of Ultrahigh Sensitive SiC-Based Strain Sensor Arrays on Elastomer toward Electronic Skins. Adv. Funct. Mater. 2019, 29, 1806786.
- Li, H.; Chen, J.; Chang, X.; Xu, Y.; Zhao, G.; Zhu, Y.; Li, Y. A highly stretchable strain sensor with both an ultralow detection limit and an ultrawide sensing range. J. Mater. Chem. A 2021, 9, 1795–1802.
- Yu, Y.; Zhai, Y.; Yun, Z.; Zhai, W.; Wang, X.; Zheng, G.; Yan, C.; Dai, K.; Liu, C.; Shen, C. Ultra-Stretchable Porous Fiber-Shaped Strain Sensor with Exponential Response in Full Sensing Range and Excellent Anti-Interference Ability toward Buckling, Torsion, Temperature, and Humidity. Adv. Electr. Mater. 2019, 5, 1900538.
- Gao, L.; Fan, R.; Zhou, W.; Hu, X.; Cao, K.; Wang, W.; Lu, Y. Biomimetic and Radially Symmetric Graphene Aerogel for Flexible Electronics. Adv. Electr. Mater. 2019, 5, 1900353.
- Kim, E.H.; Han, H.; Yu, S.; Park, C.; Kim, G.; Jeong, B.; Lee, S.W.; Kim, J.S.; Lee, S.; Kim, J.; et al. Interactive Skin Display with Epidermal Stimuli Electrode. Adv. Sci. 2019, 6, 1802351.
- Ryplida, B.; Lee, K.D.; In, I.; Park, S.Y. Light-Induced Swelling-Responsive Conductive, Adhesive, and Stretchable Wireless Film Hydrogel as Electronic Artificial Skin. Adv. Funct. Mater. 2019, 29, 1903209.
- Zhou, L.-Y.; Gao, Q.; Fu, J.-Z.; Chen, Q.-Y.; Zhu, J.-P.; Sun, Y.; He, Y. Multimaterial 3D Printing of Highly Stretchable Silicone Elastomers. ACS Appl. Mater. Interfaces 2019, 11, 23573–23583.
- Zhang, H.; Niu, W.; Zhang, S. Extremely Stretchable and Self-Healable Electrical Skin with Mechanical Adaptability, an Ultrawide Linear Response Range, and Excellent Temperature Tolerance. ACS Appl. Mater. Interfaces 2019, 11, 24639–24647.
- Huang, J.; Li, D.; Zhao, M.; Mensah, A.; Lv, P.; Tian, X.; Huang, F.; Ke, H.; Wei, Q. Highly Sensitive and Stretchable CNT-Bridged AgNP Strain Sensor Based on TPU Electrospun Membrane for Human Motion Detection. Adv. Electron. Mater. 2019, 5, 1900241.
- Liu, Q.; Chen, J.; Li, Y.; Shi, G. High-Performance Strain Sensors with Fish-Scale-Like Graphene-Sensing Layers for Full-Range Detection of Human Motions. ACS Nano 2016, 10, 7901–7906.
- Jeong, Y.R.; Park, H.; Jin, S.W.; Hong, S.Y.; Lee, S.-S.; Ha, J.S. Highly Stretchable and Sensitive Strain Sensors Using Fragmentized Graphene Foam. Adv. Funct. Mater. 2015, 25, 4228–4236.
- Ding, Y.; Yang, J.; Tolle, C.R.; Zhu, Z. A highly stretchable strain sensor based on electrospun carbon nanofibers for human motion monitoring. RSC Adv. 2016, 6, 79114–79120.
- Lei, K.F.; Lee, K.-F.; Lee, M.-Y. Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron. Eng. 2012, 99, 1–5.
- Atalay, O.; Kennon, W.R.; Demirok, E. Weft-Knitted Strain Sensor for Monitoring Respiratory Rate and Its Electro-Mechanical Modeling. IEEE Sens. J. 2015, 15, 110–122.
- Lee, J.-H.; Kim, J.; Liu, D.; Guo, F.; Shen, X.; Zheng, Q.; Jeon, S.; Kim, J.-K. Highly Aligned, Anisotropic Carbon Nanofiber Films for Multidirectional Strain Sensors with Exceptional Selectivity. Adv. Funct. Mater. 2019, 29, 1901623.
- Stauffer, F.; Zhang, Q.; Tybrandt, K.; Llerena Zambrano, B.; Hengsteler, J.; Stoll, A.; Trüeb, C.; Hagander, M.; Sujata, J.-M.; Hoffmann, F.; et al. Soft Electronic Strain Sensor with Chipless Wireless Readout: Toward Real-Time Monitoring of Bladder Volume. Adv. Mater. Technol. 2018, 3, 3.
- Li, L.; Xiang, H.; Xiong, Y.; Zhao, H.; Bai, Y.; Wang, S.; Sun, F.; Hao, M.; Liu, L.; Li, T.; et al. Ultrastretchable Fiber Sensor with High Sensitivity in Whole Workable Range for Wearable Electronics and Implantable Medicine. Adv. Sci. 2018, 5, 1800558.
- Su, Y.; Liu, Z.; Xu, L. An Universal and Easy-to-Use Model for the Pressure of Arbitrary-Shape 3D Multifunctional Integumentary Cardiac Membranes. Adv. Health. Mater. 2016, 5, 889–892.
- Park, J.; Choi, S.; Janardhan, A.H.; Lee, S.-Y.; Raut, S.; Soares, J.; Shin, K.; Yang, S.; Lee, C.; Kang, K.-W.J.S.T.M. Electromechanical cardioplasty using a wrapped elasto-conductive epicardial mesh. Sci. Transl. Med. 2016, 8, 344ra86.
- Xu, L.; Gutbrod, S.R.; Bonifas, A.P.; Su, Y.; Sulkin, M.S.; Lu, N.; Chung, H.J.; Jang, K.I.; Liu, Z.; Ying, M.; et al. 3D multifunctional integumentary membranes for spatiotemporal cardiac measurements and stimulation across the entire epicardium. Nat. Commun. 2014, 5, 3329.
- Choi, S.; Han, S.I.; Jung, D.; Hwang, H.J.; Lim, C.; Bae, S.; Park, O.K.; Tschabrunn, C.M.; Lee, M.; Bae, S.Y.; et al. Highly conductive, stretchable and biocompatible Ag-Au core-sheath nanowire composite for wearable and implantable bioelectronics. Nat. Nanotechnol. 2018, 13, 1048–1056.
- Gong, S.; Lai, D.T.; Wang, Y.; Yap, L.W.; Si, K.J.; Shi, Q.; Jason, N.N.; Sridhar, T.; Uddin, H.; Cheng, W. Tattoolike Polyaniline Microparticle-Doped Gold Nanowire Patches as Highly Durable Wearable Sensors. ACS Appl. Mater. Interfaces 2015, 7, 19700–19708.
- Sencadas, V.; Tawk, C.; Alici, G. Highly Sensitive Soft Foam Sensors to Empower Robotic Systems. Adv. Mater. Technol. 2019, 4, 4.
- Goldfield, E.C.; Park, Y.-L.; Chen, B.-R.; Hsu, W.-H.; Young, D.; Wehner, M.; Kelty-Stephen, D.G.; Stirling, L.; Weinberg, M.; Newman, D.; et al. Bio-Inspired Design of Soft Robotic Assistive Devices: The Interface of Physics, Biology, and Behavior. Ecol. Psychol. 2012, 24, 300–327.
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire-Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163.


