 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Phuoc Nguyen | + 4159 word(s) | 4159 | 2021-02-10 08:51:17 | | | |
| 2 | Peter Tang | Meta information modification | 4159 | 2021-02-18 08:02:05 | | |
Video Upload Options
With the generation of tremendous data, humans are experiencing a rapid development period. The large amount of data is produced from billions of wireless sensor nodes. A wireless sensor node is a sensing device capable of signal processing and data communication. A collection of those sensor nodes in a particular combination forms a wireless sensor network (WSN). Each wireless sensor node typically performs three main functions—sensing, processing, transceiving data, along with optionally issuing commands to actuators.
1. Introduction
Wireless sensor nodes with sensing, computing, and communication capabilities play an integral role in a highly connected world, where data are generated in tremendous volumes at an extremely rapid rate. That is one of the reasons that motivates researchers to pay close attention to detail and to expend tremendous effort toward the development of such devices. Current tendencies in the development of sensor nodes require not only the utilization of appropriate sensor types for the problem of interest, but also the proper usage of the right strategies for signal processing and communication. Furthermore, the ability to operate autonomously and efficiently with an energy harvesting mechanism is also much demanded. This paper aims to identify the challenges of building such systems and paves the way for researchers to create an automated and perpetually-operated wireless sensor node.
The world population in 2020, according to the United Nations [1], is approximately 7.8 billion. As reported by NCTA (The Internet and Television Association) in Figure 1, at the inception of the IoT in 2009, the number of small electronic devices connected to the Internet was around 5 billion. With in a decade, the device volume experienced a rapid increase with an exponential rate of change. By 2020, the number of IoT devices has been estimated at more than 50 billion. The quantity of connected devices will become ten times higher than the number of people on the planet in the coming years. With an enormous number of devices, along with huge masses of data generated, many research activities and efforts have been spent on creating efficient and effective IoT hardware systems where sensors, communications, and energy efficiency play important roles in providing the necessary information about various physical quantities. Therefore, it is necessary to have an overview of the technology involved in the data acquisition, processing, transmission, and power management to create prosperous IoT hardware platforms that can perform efficiently, with environmental friendliness, and with long term usage.
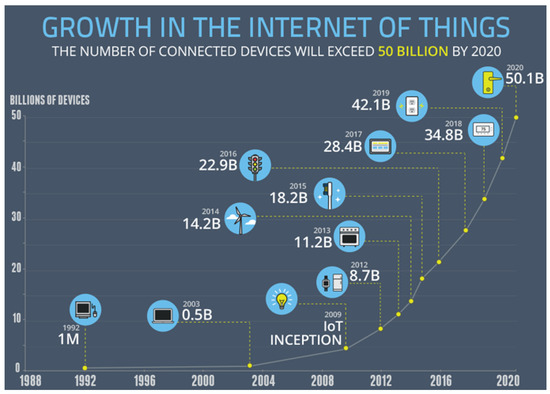
Figure 1. The population growth of the Internet of Things [2].
System characteristics are analyzed and identified based on the type of sensors used, how they are connected to form a network, and how their power is managed and maintained. The selection of sensor types, whether heterogeneous or homogeneous, has a strong effect on processing capabilities, the communication structure, and the total power usage. The application’s nature places most of the constraints on the sensor type choice. If a wireless sensor node uses only one type of sensor, it is classified as a system with homogeneous sensors. Otherwise, the node falls into the array of the heterogeneous sensor category. Depending on how measurements are conducted, users can decide to opt for one or the other. For example, if the application requires one measurement quantity only and needs a wide coverage, a system with a homogeneous sensor array is an appropriate selection. If an application, on the other hand, needs a balance in measurements from various entities to compensate for each other, the suitable choice is to go with a heterogeneous sensor system. After in situ data aggregation and processing, the node needs to send the processed data through wireless communication. An appropriate node placement strategy of the network helps save bandwidth and facilitates data processing scheme. An ad hoc network where nodes can be dynamically and easily deployed is a decent network topology for WSNs. Energy affects every aspect of the node’s operation. Hence, in order to have a sustainable and environmentally friendly solution, an energy harvesting mechanism needs to be incorporated and integrated into the design of the wireless sensor node. The dynamic changes of the environment after the system’s deployment call for an adaptable mechanism, and that is the reason why machine learning is gaining more traction these days. Various machine learning algorithms are exploited in system design, ad hoc networking, and energy harvesting to improve performance.
2. Wireless Sensor System
Each wireless sensor node typically performs three main functions—sensing, processing, transceiving data, along with optionally issuing commands to actuators (Figure 2). The sensing tasks cannot be done without sensors attached. To the best of our knowledge, there has not been any review paper for wireless sensor networks that classify sensor nodes based on their sensor type. We divide the sensors used in a wireless sensor node into two categories: heterogeneous if a node system uses sensors of various types and homogeneous if a system only utilizes only one kind of sensor. A wireless sensor node utilizes sensors for examining various aspects in the surrounding environments, and then uses the main computing unit for handling plenty of signal processing tasks. The heavy lifting jobs can be managed by many types of processing: a microcontroller unit (MCU), digital signal processing (DSP), a field-programmable gate array (FPGA), or combinations of them (Figure 3). The decision on which platform to use depends on the requirements—whether the application needs a higher performance or it demands greater flexibility in terms of usage. In the case of a large amount of data being generated, the application of machine learning in sensor systems is inevitable. The increasing usage of machine learning integrated into the processing unit makes the system adaptable to dynamic changes. However, it requires significant effort to embed a lightweight algorithm into a constrained system. Therefore, researchers are making active attempts at smooth combinations of machine learning algorithms and sensor systems. Not only running in situ processing, the nodes are also capable of sending data through networks or receiving commands to actuate on environments. Sensors in use can be of the same type or different types depending on the requirements of the problem. A heterogeneous sensor type is suitable in applications that require extensive details, while a homogeneous sensor type is relevant to applications with the need for a wide range of and accurate measurements.
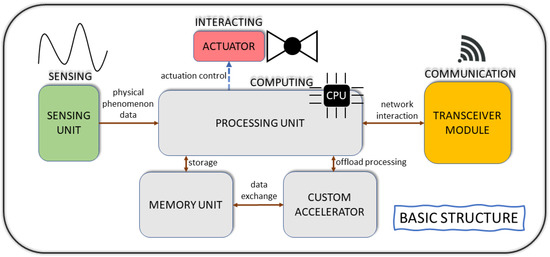
Figure 2. Basic structure of a sensor node (adapted from [3][4]).
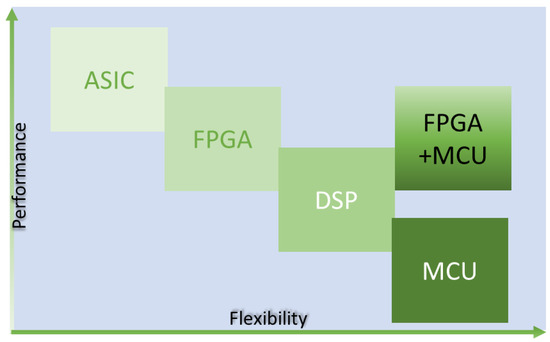
Figure 3. Different processing platforms (adapted from [5]).
2.1. Heterogeneous Sensor System
Systems using heterogeneous sensor arrays are widely used in various applications, such as environmental sensing, health tracking, and structural monitoring. Several control actions need to synthesize and analyze data from various perspectives in order to make a joint decision. For example, in agriculture, a wireless sensor node operating on volumetric water content needs to collect information from the ambient temperature and plant moisture [6]. Therefore, it inherently requires two types of sensors: temperature and moisture sensors. In some other cases, the natural diversification of properties simply renders a single sensor type unqualified to the application, thereby facilitating the use of heterogeneous sensors. For instance, in autonomous driving, each sensing device has its own diversification on the accuracy, while the road traversing action requires more intelligence to make a correct decision. Another group of situations that requires multiple types of sensors is medical and health care services where individual sensors have various data rates (Figure 4).
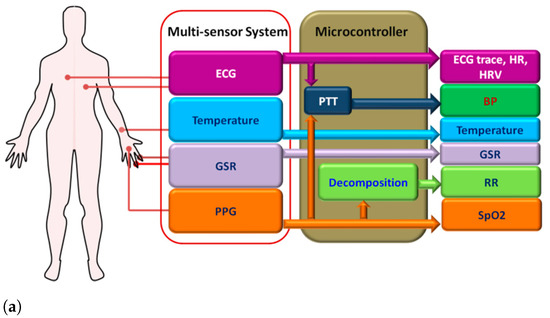
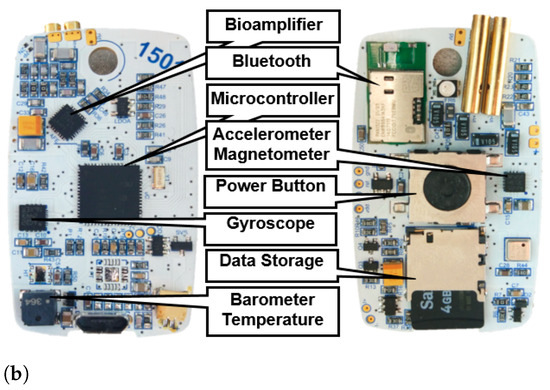
Figure 4. Usage of heterogeneous sensor systems: (a) A system utilizing ECG (electrocardiogram), temperature, GSR (galvanic skin response), and PPG (photo-plethysmograph) sensors [7]. (b) A system utilizing an accelerometer, a magnetometer, a gyroscope, a barometer, and a temperature sensor [8].
A single sensor has limitations in level of detail, such as limited spatial and temporal coverage or uncertainty of measurement data when some features are missing [9]. As pointed out in [10], a camera has a limitation in the detection range, and radar does not consistently give accurate readouts. Despite giving precise data collection and accuracy, lidar’s performance can be highly affected by environmental factors, such as rain, clouds, and the sun. Sonar can deliver information about nearby objects but has a short sensing range. Therefore, the authors in [9][10] have proposed a multi-sensor system to assist the autonomous driving functionality. In [11], a system with heterogeneous sensors was proposed for the detection of partial discharge. It utilized various sensor types, such as piezoelectric, light, and temperature to obtain more features for the detection task while lowering the detection threshold. The flow of diverse data coming from different types of sensors requires a data fusion procedure for the data processing stage. Furthermore, a customized sensor needs to be designed to accommodate application requirements on some occasions. A custom-made sensor design helps overcome drawbacks present in the current operation [12] or augment and incorporate some more functionalities into the sensors, making the design more tailored and adaptable [13]. The sensor system from [14] exhibits a good model for a design with a customized sensor and fusion algorithms. The system was applied to contamination detection in a water distribution system. Several important physicochemical parameters were determined through extensive evaluations and by various drinking water quality standards. After the analysis, five parameters, including pH, oxidation reduction potential (ORP), turbidity (TU), electrical conductivity (EC), and temperature (T), were chosen based on their reliability and performance in continuous monitoring of water quality. A custom-made turbidity sensor was developed using a ratio turbidimeter design. The developed turbidity sensor had satisfactory characteristics, such as low cost, ease of use, and the desired level of accuracy, making it preferable over off-the-shelf components. All chosen sensors were accompanied by a calibration procedure to obtain linear responses and high accuracies. Each sensor’s data went into a PIC controller where data fusion and contamination detection algorithms were used. Processed data were then transmitted wirelessly through a ZigBee 3G/GPRS (General Packet Radio Service) module to a notification node for immediate actions at the local site or to a control node for access over the Internet and real time monitoring. The detection of contamination events was expressed by two algorithms: the vector distance algorithm (VDA) and the polygon area algorithm (PAA). The computations also performed the multi-sensor measurement fusion for TU, ORP, pH, and EC. Sensor measurement outputs were required to be normalized using sensor parameters over a specific monitoring time. The two algorithms expected statistical values such as the mean and standard deviation of sensor measurements over a certain time range along with a sensor parameter to obtain normalized sensor outputs. The detection algorithms formulated the risk of water contamination based on normalized sensor signal vectors. Experiments were set up to assess the hardware performance along with the software’s effectiveness in contamination detection. Two types of controlled injection were performed: one for microbiological contamination using Escherichia coli and one for chemical contamination using Arsenic. In both cases, the system responded with satisfactory results, and one algorithm (PAA) outperformed the other in terms of performance and amount of information utilization.
Besides using traditional MCUs as the main processing units, some applications demand high-speed processing. Thus, other types of processing engines can be used, such as DSP or FPGA. Ledeczi et al. [15] proposed a wireless detection system for fatigue cracks in railways bridges. The system featured appreciative characteristics, such as low cost and easy deployment, in contrast to using costly and cumbersome long-cable systems. Furthermore, the suggested system is favored over a visual inspection due to the useful assessment based on various parameters related to the fracture of the infrastructure. The system fulfilled the functional and non-functional requirements of the structural monitoring problem through various means: by utilizing a high number of sensors for large coverage, exploiting lightweight energy storage and energy harvesting to eliminate the need for a constant power source, removing lengthy wires by wireless communication, and facilitating high volume deployment with low cost components. The system utilized an array of heterogeneous sensors with a four-channel acoustic emissions (AE) sensor and a strain gauge. Multiple AE channels were used to filter out noise in the bridge system, providing consistent observations. Due to the high demand for power and the presence of crack-related acoustic emissions when a train moved across the bridge, AE sensors were not active all the time. The strain gage, therefore, acted as a trigger for the whole system, realizing when a moving object was coming, and it would wake up other parts in the system accordingly. This approach reduced a large amount of power consumption and lengthened the system’s lifetime for one battery charge by up to six weeks. Due to insufficient computing resources in low-power DSP chips, the system used the FPGA as the main computation engine. The FPGA facilitated streaming signal processing, eliminating the demand for signal buffers and increasing the sampling speed. The FPGA-based system performed high-speed samplings and various signal processing tasks, such as feature extraction and source localization. The authors analyzed various aspects of AE events stemming from a bridge rift, such as patterns in the waveform and conspicuous signal features that could tell the difference between events of interest and noise. Two criteria for the AE data evaluation were activity and intensity. The activity was interpreted as acoustic events recognized by all AE sensors with three levels: inactive, active, and critically active, where the peak load constant occurred. The intensity was characterized as the average value of the acoustic event magnitude. Four degrees of intensity were introduced: inactive and low-intensity, intense, and critically intense. The feature extraction process was performed based on the occurrence of an AE event. It started with a surge across a threshold and lasted as long as the signal did not cross the threshold for a specified duration. During those two instances, various values were recorded, such as how many times the threshold had been crossed, the maximum amplitude, the rise time, the event length, and the signal energy. After the event evaluation and detection steps, if the result turned out to be consistent in terms of timestamp, the source localization was consequently performed. The hardware platform was incorporated with the IEEE 802.15.4 radio module for wireless communication in the band of 2.4 GHz. The standard features included a communication range in the order of a hundred meters with a typical power consumption of 50 mW and a data rate of 250 kbps. The system was also deployed with an ad hoc topology where multiple AEpods were placed at strategic places where cracks were most likely to occur on a bridge. This approach promoted great flexibility in the deployment as long as the communication range was sufficient. A multi-hop message routing method was implemented for to realize the ad hoc topology using the directed flood routing framework. Based on the type of AE, which resulted from the classification process, only critical events in level 4 were multi-hop forwarded to the base station. Insignificant events in level 1 were discarded, whereas significant events in levels 2 and levels 3 were stored on the SD (secure digital) card for a more in-depth examination if an operator needed further queries. The system was compared to a wired system regarding the number of events detected and the average intensity measurement. The results showed that not much difference existed between the two systems. Hence, they justified the system’s design philosophy.
Traditional WSNs exhibit regular and predictable behaviors after the deployment, but the environment is always changing dynamically. Therefore, WSNs require some techniques to handle the problem. A machine learning approach emerges as a promising and attractive candidate due to its ability of automated learning without explicit instructions. Odat et al. [16] proposed a unique sensing device for traffic monitoring that utilized various machine-learning based solutions. Besides performing the sensing and estimation tasks, the system wirelessly transmitted its processed results to a sink node to address more complicated inquiries such as the congestion determination, the calculation of optimal path to the destination with the least heavy traffic, or the dynamic traffic light commanding. In this traffic control application, the array of heterogeneous sensors—PIR (passive infrared) sensors and ultrasonic rangefinders—formed a non-intrusive solution and possessed suitable characteristics, such as low cost, reasonable size, efficient power, and environmental friendliness. Furthermore, the two types of sensors chosen acted as complements to each other. Since measurements from the ultrasonic sensor were less noisy than those from PIR sensors, their combination helped mitigate the number of false alarms and missed detections. The layer of PIR sensors imposed an intrinsic distance limitation, which confused the detection for only one long vehicle with multiple vehicles traveling back to back in proximity. Measurements made by ultrasonic rangefinder once again compensated for PIR measurements to obtain more robust vehicle identifications. The system revolved around an ARM Cortex M4 micro controller with 128 KB of RAM (random access memory). A solar power generation estimation was incorporated through an energy monitoring circuit. This combination was suitable for energy harvesting. The platform provided a nice balance between the estimation requirements and the built-in resources to interface with the required number of heterogeneous sensors. In this application, a running vehicle had an ample amount of parameter signatures which contributed to the high dimensionality problem. Thus, the authors proposed an adaptive algorithm that performed reasonably on unseen data. A wavelet transform handled data denoising before the application of any processing algorithms. A nonlinear autoregressive exogenous input neural method was then used to build a network for the ground temperature estimation. The variations in measurement could be observed if there was a difference between the estimated temperature and the actual one from PIR sensors. By cross verification with validation data, the high discrepancies were indicators of the presence of a vehicle within the coverage range of PIR sensors. Therefore, the variations served as inputs to two algorithms for vehicle detection: dynamic Bayesian networks and Gaussian mixture models. The Bayesian Network was also used to address the vehicle classification problem, given the fusion measurements from PIR sensors and ultrasonic rangefinders. A 10W solar panel was used to take advantage of the available ambient energy since the device has been placed at various outdoor locations such as urban streetlights or public street signs. The in-node sensor signal processing largely contributed to a significant reduction in energy consumption compared to direct data forwarding to the sink node Thus, it was greatly beneficial for the system to use the solar panel as a power source. For evaluation, the field tests indicated high accuracy in vehicle detection (99%), an acceptable error in speed estimation, and adequate accuracy in vehicle classification.
Table 1 depicts various characteristics of a heterogeneous sensor system from the system development viewpoint. In order to build strong and robust heterogeneous sensor systems, a thorough analysis needs to be performed to construct proper sensors, capable hardware platforms, effective sensor fusion processes, and innovative algorithm designs. In several designs, machine learning assists heterogeneous sensor systems to resolve obscure situations.
Table 1. Heterogeneous sensor systems with system design features.
| Paper | Conspicuous Features | Field of Application |
|---|---|---|
|
Lambrou et al. [14] |
Custom sensor, data fusion, and detection algorithm design |
Water contamination detection |
|
Ledeczi et al. [15] |
Utilize FPGA, system wakeup using sensor trigger, multi-hop ad hoc network |
Civil structural monitoring |
|
Odat et al. [16] |
Lightweight machine learning algorithms on WSN |
Vehicle classification and speed estimation |
|
Han et al. [17] |
Utilize DSP, process sound and magnetic data, ad hoc network |
Sound search for robots with collaboration |
2.2. Homogeneous Sensor System
An array of homogeneous sensors is multiple identical sensors with a duplicated setting and put together in a particular geometric topography to provide the same input data. Systems with an array of homogeneous sensors possess a high number of dimensions of the problem and need to coordinate the sensors for an appropriate collaboration. Those systems are usually associated with the processing of electromagnetic and acoustic signals (Figure 5).
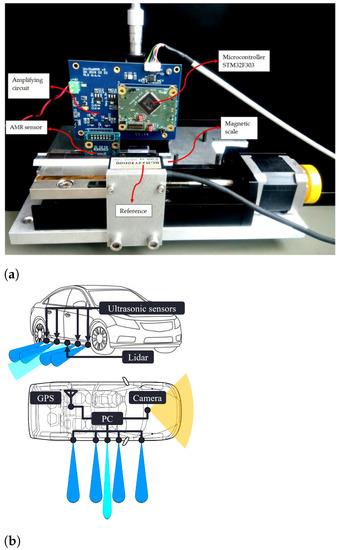
Figure 5. Usage of homogeneous sensor systems: (a) A system using array of magnetoresistive sensors [18]. (b) A system using array of ultrasonic sensors [19].
Applications utilizing homogeneous sensors can have an enhanced coverage range, spread out over the area of interest, and receive more precise measurements. For instance, an array of high-density tunneling magnetoresistance sensors gave a broader and better detection of disturbance in magnetic fields caused by suspected objects [20]. In another design [21], an array of three packaged PZT (packaged piezoelectric transducer) sensors was used in an ultrasonic analysis for the fatigue crack detection. Two PZTs excited two distinguished sinusoidals while the other one performed measurements from the ultrasonic response. The authors attempted to provide a low power device with a convenient deployment. The device could be easily attached to the target structure, and the detection could then be performed autonomously without any past data. The sensor node consisted of four modules, responsible for data sensing, acquiring and processing, communication, and powering. Three channels were present in the excitation/sensing module: one for high frequency (HF) excitation, one for low frequency (LF) excitation, and one sensing channel. The data acquisition/processing module had a combination of FPGA and a micro controller. With its parallel operation nature, the FPGA was perfectly suited for high-speed data logging. The crack detection algorithm was embedded into the micro controller, where most of signal processing tasks were conducted. The two devices both interacted with the ultrasonic data stored on an SRAM (static RAM) memory. The wireless communication module was realized with an off-the-shelf Z1 module, which used the ZigBee standard for low power consumption. Since the node aimed for low power usage, it mainly stayed in the sleep mode and only woke up once every several weeks. A low power timer in the communication module played as the primary system trigger, which allowed the node out of the sleep mode It activated the data/acquisition module and the excitation/sensing module to perform the structure diagnostic algorithm. The detection algorithm was based on the data modulation. A structure applied with two unique frequencies would expose only two original frequencies in case of no damages. On the other hand, if the structure had some fatigue crack, it would manifest harmonics and modulation of the input frequencies. A history data free crack detection algorithm was constructed based on that finding. An ad hoc network was utilized when the system was deployed on the field with the participation of a sink node and relay nodes. The sink node gave an overall look on the whole network operation, and the relay nodes helped for data aggregation. The system used a lithium battery as the primary power source with the consideration to exploit some forms of energy harvesting such as solar power, vibration energy originated from the traffic, and RF-based (radio frequency) wireless energy transmission. The system was thoroughly verified through both a laboratory test and a field test. The deployment outcomes conducted by Non Destructive Testing engineers were used as a confirmation for the detection algorithm implemented on the sensor node. The result justified that the proposed sensor node performed consistently with the validation data. A follow-up design of [21] was later proposed in [22] to harvest low-frequency vibration energy from the bridge, equipping the wireless fatigue crack detector with energy harvesting capability. The system has lengthened battery life up to 2.2 years, thus significantly reducing the maintenance cost.
As with the heterogeneous counterpart, a computing engine can belong to various types, such as DSP or FPGA, to speed up multiple operations. Multimedia data often requires a DSP unit because of its high data volume. The authors in [23] proposed a hand Gesture Recognition System with DSP as the main processing unit and a 434 MHz RF transceiver as the local communication unit. The system performed the palm extraction from image sensors to associate the action with various operations such as interacting with file browsers or manipulating digital libraries. It not only eliminated bulky computing devices, gloves, and makers but also helped to enhance end-user product appreciation. The DSP unit was responsible for conducting the principal duties such as image segmentation, palm extraction, and gesture recognition.
Machine learning, because of its adaptation, outperforms rule-based methods, which are merely built upon a certain threshold level. In [24], the author fed four-second window data from six wearable motion sensor units to various machine learning classifiers to distinguish a fall from a daily life activity. Machine learning-based algorithms achieved an accuracy of over 95% with satisfying computational requirements which made the classifiers applicable for real-time operations.
Table 2 highlights numerous features of homogeneous sensor systems and the gained benefits. Systems with homogeneous sensors might not provide as many features as the ones using heterogeneous sensors, but they are useful in terms of providing intensive details, more precise measurements, and a wide range of coverage. The integration of machine learning algorithms into such systems helps to improve the accuracy of applications.
Table 2. Homogeneous sensor systems with system design features.
| Paper | Conspicuous Features | Field of Application |
|---|---|---|
|
Liu et al. [21] Yang et al. [22] |
Portable deployment, historical data free operation, MCU + FPGA, vibration harvesting |
Fatigue crack detection on bridge |
|
Nikhil et al. [23] |
Utilize DSP, eliminate bulky equipment |
Gesture recognition |
|
Özdemir and Barshan [24] |
Machine learning supported fall detection with high accuracy |
Living healthcare |
|
Hussain et al. [25] |
Parallel processing by FPGA, hardware software co-design, reconfigurability, low power, energy efficacy |
Real-time interferometry system |
References
- United Nations, Department of Economic and Social Affairs, Population Division. World Population Prospects. 2019. Available online: https://population.un.org/wpp/Download/Standard/Population/ (accessed on 30 December 2020).
- National Cable & Telecommunications Association/NCTA—The Internet & Television Association, United States. Behind the Numbers: Growth in the Internet of Things. Available online: https://www.ncta.com/whats-new/behind-the-numbers-growth-in-the-internet-of-things (accessed on 31 December 2020).
- Adu-Manu, K.; Tapparello, C.; Heinzelman, W.; Katsriku, F.; Abdulai, J.D. Water Quality Monitoring Using Wireless Sensor Networks: Current Trends and Future Research Directions. ACM Trans. Sens. Netw. 2017, 13, 1–41.
- Singh, A.; Kumar, S.; Kaiwartya, O. A Hybrid Localization Algorithm for Wireless Sensor Networks. In Proceedings of the 3rd International Conference on Recent Trends in Computing 2015 (ICRTC-2015), Ghaziabad, India, 12–13 March 2015; Volume 57.
- Guruprasad, S.; Bisnath, S.; Lee, R.; Kozinski, J. Design and implementation of a low-cost SoC-based software GNSS receiver. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 14–19.
- Gutiérrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gándara, M.A. Automated Irrigation System Using a Wireless Sensor Network and GPRS Module. IEEE Trans. Instrum. Meas. 2014, 63, 166–176.
- Majumder, S.; Mondal, T.; Deen, M.J. Wearable Sensors for Remote Health Monitoring. Sensors 2017, 17, 130.
- Vavrinsky, E.; Subjak, J.; Donoval, M.; Wagner, A.; Zavodnik, T.; Svobodova, H. Application of Modern Multi-Sensor Holter in Diagnosis and Treatment. Sensors 2020, 20, 2663.
- Bouain, M.; Ali, K.; Berdjag, D.; Fakhfakh, N.; Atitallah, R. An Embedded Multi-Sensor Data Fusion Design for Vehicle Perception Tasks. J. Commun. 2018, 13, 8–14.
- Giacalone, J.; Bourgeois, L.; Ancora, A. Challenges in aggregation of heterogeneous sensors for Autonomous Driving Systems. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–5.
- Nguyen, P.D.; Vo, H.Q.; Le, L.N.; Eo, S.; Kim, L. An IoT Hardware Platform Architecture for Monitoring Power Grid Systems based on Heterogeneous Multi-Sensors. Sensors 2020, 20, 6082.
- Bartsch, M.S.; Federle, W.; Full, R.J.; Kenny, T.W. Small insect measurements using a custom MEMS force sensor. In Proceedings of the TRANSDUCERS ’03, 12th International Conference on Solid-State Sensors, Actuators and Microsystems, Digest of Technical Papers (Cat. No.03TH8664), Boston, MA, USA, 8–12 June 2003; Volume 2, pp. 1039–1042.
- Shih, B.; Drotman, D.; Christianson, C.; Huo, Z.; White, R.; Christensen, H.I.; Tolley, M.T. Custom soft robotic gripper sensor skins for haptic object visualization. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 494–501.
- Lambrou, T.P.; Anastasiou, C.C.; Panayiotou, C.G.; Polycarpou, M.M. A Low-Cost Sensor Network for Real-Time Monitoring and Contamination Detection in Drinking Water Distribution Systems. IEEE Sens. J. 2014, 14, 2765–2772.
- Ledeczi, A.; Hay, T.; Volgyesi, P.; Hay, D.R.; Nadas, A.; Jayaraman, S. Wireless Acoustic Emission Sensor Network for Structural Monitoring. IEEE Sens. J. 2009, 9, 1370–1377.
- Odat, E.; Shamma, J.S.; Claudel, C. Vehicle Classification and Speed Estimation Using Combined Passive Infrared/Ultrasonic Sensors. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1593–1606.
- Han, L.; Shen, Z.; Fu, C.; Liu, C. Design and Implementation of Sound Searching Robots in Wireless Sensor Networks. Sensors 2016, 16, 1550.
- Domajnko, D.; Kriẑaj, D. Lagging-Domain Model for Compensation of Hysteresis of xMR Sensors in Positioning Applications. Sensors 2018, 18, 2281.
- Rhee, J.H.; Seo, J. Low-Cost Curb Detection and Localization System Using Multiple Ultrasonic Sensors. Sensors 2019, 19, 1389.
- Gao, J.; Wang, J.; Zhang, L.; Yu, Q.; Huang, Y.; Shen, Y. Magnetic Signature Analysis for Smart Security System Based on TMR Magnetic Sensor Array. IEEE Sens. J. 2019, 19, 3149–3155.
- Liu, P.; Lim, H.J.; Yang, S.; Sohn, H.; Lee, C.H.; Yi, Y.; Kim, D.; Jung, J.; Bae, I.H. Development of a “stick-and-detect” wireless sensor node for fatigue crack detection. Struct. Health Monit. 2017, 16, 153–163.
- Yang, S.; Jung, S.Y.; Kim, K.; Liu, P.; Lee, S.; Kim, J.; Sohn, H. Development of a tunable low-frequency vibration energy harvester and its application to a self-contained wireless fatigue crack detection sensor. Struct. Health Monit. 2019, 18, 920–933.
- Nikhil, S.; Mohan, S.; Ramya, B.; Kadambi, G.R. Design and development of a DSP processor based reconfigurable hand Gesture Recognition System for real time applications. In Proceedings of the 2010 International Conference on Signal and Image Processing, Chennai, India, 15–17 December 2010; pp. 39–44.
- Özdemir, A.T.; Barshan, B. Detecting Falls with Wearable Sensors Using Machine Learning Techniques. Sensors 2014, 14, 10691–10708.
- Hussain, T.; Amin, S.; Zabit, U.; Bernal, O.D.; Bosch, T. A high performance real-time Interferometry Sensor System Architecture. Microprocess. Microsyst. 2019, 64, 23–33.

