 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Min Thu Soe | + 5634 word(s) | 5634 | 2021-01-07 06:39:12 | | | |
| 2 | Karina Chen | Meta information modification | 5634 | 2021-01-13 03:15:09 | | | | |
| 3 | Karina Chen | Meta information modification | 5634 | 2021-01-14 03:09:05 | | |
Video Upload Options
The indoor positioning system (IPS) is becoming increasing important in accurately determining the locations of objects by the utilization of micro-electro-mechanical-systems (MEMS) involving smartphone sensors, embedded sources, mapping localizations, and wireless communication networks.
1. Introduction
With the increasing improvement of the Internet of Things (IoT), location-based services and localization-based computing have attracted much attention because of their widespread applications [1]. Hence, information on the locations of the targets plays an important role in localization systems [2]. Localization systems are used to locate or track people or devices, in developing existing systems, which can use different technologies and methods depending on the application. For instance, the estimation of outdoor positioning, tracking and navigation have been used by satellite system with Google Maps, which supports global coverage, such as GPS, assisted-global positioning system (AGPS), global navigation satellite systems (GNSS), assisted-global navigation satellite systems (AGNSS). All these systems provide their coordinates (latitude and longitude) from a satellite location parameter that estimates the desired target location obtained from other network resources. Among them, GPS is one of the most well-known and universal technologies for outdoor localization systems used in vehicle navigation and missile guidance.
Indoor location positioning systems can develop the service areas provided by smart homes, warehouses, museums, healthcare centres, indoor parking lots, and shopping malls. For that reason, it is attractive to research on a low-cost design that can provide accurate localization in the indoor surroundings. However, indoor localization has more challenges than outdoor localization. By the consideration of extra information, the ray tracing techniques are widely used for increasing indoor radio wave propagation in the wireless communication system [3]. The authors described 3D smart ray tracing approach by varying frequency values such as at 4.5, 28 and at 38 GHz. which are compared with former methods, targeting to improve accuracy and efficiency [4][5][6][7][8][9].
Indeed, the pattern of signals in indoor environments is more complicated than outdoor environments due to the multipath effect, fading, reflecting, deep shadowing effect and the deterioration of delay resulting from pervasive hindrances and interactive interference [10][11]. Therefore, the common GPS-based localization system is difficult for indoor localization systems because of the dependence on the line-of-sight (LoS) communication of radio signals. Additionally, indoor localization systems need a much higher precision than the meter-level solution of outdoor localization [12]. As GPS signals are met with challenges in indoor localization systems, many researchers have proposed a variety of technologies such as infrared, visible light, sound (audible and ultrasound) magnetic field, an inertial navigation system (INS), computer vision-based and radio frequency to achieve indoor localization.
Among these technologies of short and medium-range communication, infrared (IR) and visible light are included in the seven-segment of the electromagnetic spectrum. Infrared technology and visible light exist under the optical technology of electromagnetic radiation. The tracking and positioning of the user are described based on light beams [13] in which infrared transmitters are mounted on the room corner and the user is engaged with an infrared receiver. The drawback of IR technology is that it cannot easily pass through the making room with strong materials for LoS environment. Furthermore, it required hardware components to tag on the human body. In [14], the authors exploited passive infrared indoor localization methods through thermal radiation due to the formation of motion body, instead of using a hardware tag as a connection device. In the visible spectrum, the human eye can see the electro-magnetic waves as a white light that is a combination of the rainbow colours. Fluorescent lamps and light-emitting diodes (LEDs) are used to transmit signals as a visible light communication (VLC) which includes a short-range optical wireless communication of indoor appliances. The transmission data can be obtained via light beams as the light pulses and these receiving data change with distance. The authors in [15] performed a comprehensive survey of VLC innovation by applying LED light bulbs. VLC has been intended to replace the usage of other radio frequency areas, as a more efficient and commercially orientated high bandwidth transmission but requires higher hardware complexity [16]. For computer vision and image processing, adequate illumination from the light source can support the camera to detect the location of things successfully. Consequently, the camera-based location determinations are dependent on the lighting condition.
2. Parameter Based Positioning
This section presents measurement parameters for localization systems. Several parameters are utilized to determine the target position for indoor localization systems. The fundamental wireless signal measuring theorems in indoor positioning systems are RSSI, TOA, and AOA or DOA. In addition, TDOA, RTT, angle difference of arrival (ADOA), phase difference of arrival (PDOA), POA, CSI, RSRP, and RSRQ are also used in indoor positioning and tracking environments. Figure 1 depicts the distance-based and direction-based signal measurement parameters for indoor positioning systems.
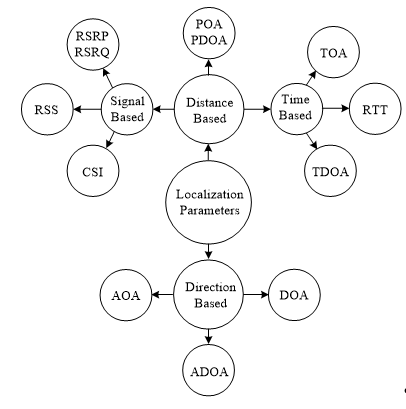
Figure 1. Localization system parameters for distance and direction measurement.
2.1. RSSI
The received signal strength indicator (RSSI) is a comparative measurement of the RSS which has random units and is commonly described by a single chip vendor [17]. RSSI is a commonly used metric to find an estimation of the distance between a target and the node without resorting to complicated calculations. It computes distance by power loss, the signal strength deficiency, between two nodes. Figure 2 shows the RSSI-based trilateration method. This method can work using only a couple of nodes to obtain a distance estimation [18]. The RSSI-based algorithm only requires the received signal strength and does not require an auxiliary hardware apparatus and time synchronization, able to achieve higher accuracy than other methods.
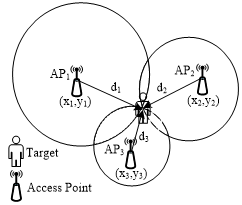
Figure 2. RSSI-based trilateration
The RSSI technique can be classified into a range-based and range-free approach. The first approach is an RSSI based on a path loss model. The propagation model involves building a map associated with the physical regulations of the wireless signal. The precision and flexibility of the environment are poorer in the range-based method, which can locate the position of the object by using trilateration, min–max, and maximum likelihood algorithms. The latter approach generates the use of a fingerprinting database (radio map) for localization [19]. A range-free method does not require angle or distance measurements among nodes. The fingerprinting technique is higher in accuracy and can be used for various indoor environments. However, RSSI measurement can cause an error due to environmental effects. The real indoor environment consists of multiple obstacles that affect radio signal propagation [1].
RSSI is susceptible to noise and multipath effects which significantly decreases its localization accuracy [20]. In addition, there is the LoS problem between the two nodes, which can significantly influence error. However, RSSI calculation accuracy is increased by calibrating and analysing the radio signal propagation.
2.2. TOA
TOA is also known as TOF [21] and is described as the first period within which the signal reaches the receiver. It can estimate the distance to the node by computing the broadcast time travel of a wireless radio signal [22][23] as shown in Figure 3. The traditional TOA schemes needs a minimum of two or three reference nodes in a LoS situation with a target, to support a high level of position accuracy [24]. The nodes can be synchronized or the miss-synchronization in TOA and the signal must consist of the timestamp data [25]. To solve these issues, the TDOA method, as well as the round trip time of arrival (RTOA) method, also called RTOF, is implemented. RTOA ranging mechanisms are identical to TOA, but it does not need a corporate time reference within nodes. TOA is influenced by multipath and additive noise. Additive noise imitates the precision of the signal arrival time. This problem can be fixed by applying the TDOA instead of TOA [26].
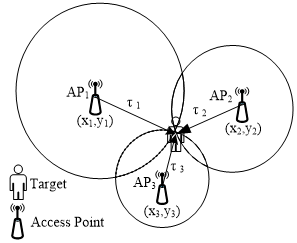
Figure 3. TOA-based trilateration.
2.3. TDOA
It is a technique to calculate the distance information between the two nodes. TDOA determines the variance of arriving times (timestamps) between the anchor nodes in the same package from the target. Figure 4 illustrates its basic operation for the TDOA-based method. This method requires at least three anchor nodes with known coordinates to find the object position. The anchor nodes listen to transmissions from the target and compute a position estimated by comparing the variances in the arrival times [27]. This method performs by determining the change in the time between a couple of anchor nodes.
On the other hand, the multi-signal needs two different types of signals that have varying propagation speeds to compute its distance to another node. The accuracy of TDOA is due to complex indoor propagation such as multipath transmission and shadowing. The radio signals reaching the receiving antenna by different paths cause multipath transmission. This method needs extra equipment. The ultrasound or audible frequency can be used in this method using the same algorithm [26]. The achievement of the TDOA is subject to synchronization between the anchor nodes and the precision of the taken timestamp.
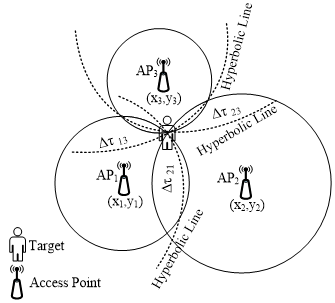
Figure 4. TDOA-based trilateration.
2.4. RTT
Wi-Fi-based two-way ranging approaches have been proposed for indoor positioning and tracking systems to improve the positioning accuracy. These positioning systems are based on fine time measurement (FTM) of the RTT of a signal between a smartphone (target) and an access point. The RTT or RTOF technique estimates the distance by the broadcast timestamp of the FTM message and the response of its acknowledgement [28] in Figure 5. This measurement approach is based on the TOF and develops to solve the synchronization problem subjected to the use of TOA. The RTT measurement does not need the clock synchronization between the nodes. This means less complexity and high reliability. In addition, the ranging error and range between a couple of devices are nearly independent when the clock operates at the same rate on the nodes. The FTM can give a large range estimation and a large update rate compared to the scene analysis system. However, the RTT ranging measurement has limitations with respect to its reflection, fading, shadowing, and unstable clock speed due to phase noise as well as a different processing time delay. Moreover, the FTM protocol has a concurrent processing capacity problem and an access point cannot concurrently reply to higher amounts of FTM inquiries [29].
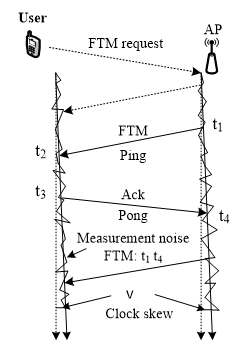
Figure 5. RTT with a skewed clock.
One approach is the Wi-Fi RTT-based indoor positioning system in car parks [30]. The proposed system used a trilateration method and a probabilistic method to estimate the car’s location. The result of this system shows that the Wi-Fi RTT is suitable for industrial indoor positioning in a dynamic environment. This system achieves an average accuracy of 2.33 m and the accuracy can be improved with higher radio communication or a larger number of access points. Another approach is a hybrid algorithm based on the RTT and RSS, which was exploited to solve the restrictions of the Wi-Fi RTT ranging technique [29].
This approach presents the RTT estimation with a clock skew and investigates the RTT range error distribution. It also removes the RTT ranging offset at the emitter end by using the calibration method. The proposed system achieves scalability and accuracy in static and dynamic experiments in both the outside and inside environment. The average location accuracy of this work is 1.435 m and an update rate is 0.19 s in a real environment. Although the RTT-based indoor positioning system can achieve standard deviations of 1–2 m, in some applications, for example, an emergency worker in a multi-story building, this can impact the position error due to the signal bandwidth, the delay of the signal, and the noise gain. Therefore, the frequency diversity method was introduced for the accurate position estimation using weighted averages of evaluations with uncorrelated errors acquired in various networks [31].
2.5. AOA and ADOA
AOA is a technique of determining the position of objects by taking the angular data of that object with respect to the orientation of the receivers. A simple AOA calculation is to work on an antenna array on one sensor node. The angle-based method needs a minimum of three reference nodes coordinated to determine the position of the object by using a triangulation method as shown in Figure 6 [32]. In general, the AOA method can obtain angle data using radio array techniques and can estimate by using directional or multiple antennas. In multiple antennas, this acts by analysing the phase or time variation between the signals at different array items that have seen locations regarding the centre element.
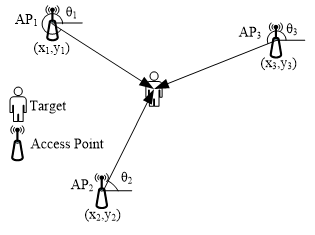
Figure 6. AOA-based triangulation.
In directional antennas, it acts by computing the RSSI ratio between many directional antennas that are carefully located to have a similarity between their major beams [33]. AOA determinations with the support of exact antenna design or hardware apparatus are utilized for inferencing the location of the receiver. The improved complexity and the hardware necessity are the major interferences for the extensive success of AOA-based location systems [34]. AOA is also disturbed by noise, NLoS and the multipath. Moreover, the defects of LoS can be more serious than those of TDOA- or RSS-based techniques [35]. AOA needs additional space to offer spatial diversity and extra hardware that is a real waste of power, but it does not require time synchronization between nodes [36]. Both TOA and AOA parameters require reference units that can decide the arrival time and angle of the received signal which is unattainable to common WLAN devices. Thus, the RSSI technique is most extensively used in an indoor localization, positioning and tracking system. ADOA does not need the information on angles as it can be ignored in the variance between two AOA values. This means that the receivers are to be located towards a definite angle. AOA-based optical indoor positioning systems are more challenging due to the necessity to identify the orientation of the receiver. The optical receiver is either limited to certain orientations or it must be combined with gyroscopes and accelerometers to define its exact orientation. To solve this problem, ADOA is used for an optical indoor positioning system [37]. Hence, the ADOA does not require extra sensors like gyroscopes [38].
2.6. DOA
DOA-based measurements use the angle information of the received signal to estimate its position [39]. The DOA approach, also called AOA, is simpler than time-based measurements because of the estimation of the 2D position with only two angle measurements. The DOA-based positioning system is the evaluation of the signal AOA. The accuracy of the DOA-based localization system is highly impactful with regard to multipath effects. However, this technique depends on accurate angle measurements. The DOA estimation can be done by using an antenna array or direction. In addition, DOA-based systems have proposed and applied for a localization system integrating with different measurement techniques such as RSS, TOF, TDOA, and RTOF. There are several different antenna implementations such as the narrowband system, switch beam, phase antenna array, and UWB-based system estimate localization based on DOA algorithms [40]. The DOA-based localization systems need a suitable antenna with different requirements.
DOA-based techniques are divided into the offline and online technique based on the applications [39]. In offline method, this computes multiple times, and the average value label as the fingerprints. By using these fingerprints, the triangulation method estimates the location. The offline systems have larger complexity and can be utilized for offline applications. In online method, the angles are determined from the received signals and the triangulation method estimates the position. These methods have smaller complexity and utilize real time applications. The DOA techniques have been presented for an indoor localization system to estimate channel characteristics and focus on the multipath propagation interference problem [41][42]. Moreover, a hybrid joint direction and time difference of arrival (JDTDOA) approach has introduced the precision of the system performance [43].
2.7. POA and PDOA
POA ranging techniques estimate the distance by measuring the phase of the carrier signal [17]. It is also called received signal phase (RSP). There is a number of POA measurements that have been used in RFID-based localization systems. The POA-based approach was introduced to increase accuracy and decrease disturbances due to multipath propagation in passive RFID 2D localization system [44]. The results of the estimated POA existed in an unlimited number of paths due to the 2π uncertainty in phase estimations. By means of the frequency-stepped continuous-waveform principle, the distance of the propagation path can compute definitely for a high bandwidth system. The POA techniques can be used integrated with different techniques such as TOF, TDOA, and RSSI to increase their performance. However, POA-based approaches may need LoS for high accuracy.
The ranging measurement based on PDOA uses the phase difference of the propagation path between the anchor nodes or the reader to the tag to calculate its distance [45]. It is also mostly used in RFID and wireless sensor networks (WSNs) system. The phase errors can be small due to the very small signal bandwidth. Unfortunately, unavoidable ambiguities can occur during the evaluation of the true distance due to the multipath effects and a 2 π phase periodicity [46].
2.8. CSI
With new technology developments in wireless communication systems, 4G long-term evolution (LTE) mobile transmissions, and Wi-Fi systems have used orthogonal frequency division multiplexing (OFDM). OFDM converts information on several altered subcarriers at one band. In the IEEE 802.11 standard, the receiver wants to approximate CSI in the physical (PHY) layer for the data translation. The CSI is the channel frequency response of each subcarrier under the OFDM system within the frequency field. Thus, CSI utilizes dozens of times more data than traditional RSSI in the network features between the sender and the receiver [47]. In the frequency field, CSI is definitely the PHY layer data with a fine-grained characteristic value that defines the amplitude and phase of a single subcarrier [48]. In the field of narrowband transmissions, this denotes the network property of the transmission link that expresses the reduction in the signal in the development of communication between the two nodes, containing scattering, distance and environmental attenuation, as well as other information [49]. The CSI-based method uses the physical layer channel state information of a communication link. A corresponding CSI can be measured when a target is displayed indoors. The CSI fingerprint matching, triangulation, and trilateration method can be used to determine the location of the target [50][51].
The CSI-based method shows good stability and can achieve higher location accuracy than the RSSI-based method [52]. Moreover, CSI is favoured more than RSSI, since it develops the frequency diversity of Wi-Fi networks and is not coarse-grained like RSSI. The CSI-based approach has many advantages such as the ease of arrangement given the pervasiveness of a Wi-Fi setup [53]. In addition, the CSI-based Wi-Fi localization system can achieve decimetre-level accuracy. On the other hand, CSI-based Wi-Fi schemes need a labour-intensive site survey to calibrate the access points (APs) location and the antenna array direction, which obstructs real-world implementation [54]. Another disadvantage is that the CSI-based fingerprinting method needs larger space and more comprehensive time due to a larger measurement of CSI compared with RSSI, which is not appropriate for most situations [55].
2.9. RSRP and RSRQ
The RSRP and RSRQ parameters are physical layer data from the 4G cellular system that are used to reasonably forecast the user position [56]. The RSRP computation is based on RSSI. It calculates mean obtainable strength by cell-specific reference signals [57]. Thus, it can afford greater signal strength information associated with various positions contrasting normal RSSI. The PHY layer RSRP reduces local disturbances in the surroundings. In the office location, the RSSI estimates from 4G towers produce a better forecast than RSSI signals from 2G towers, due to the existence of small cells.
The RSRQ parameter that delivers the value of received signals within the object device is developed from the RSSI and RSRP value. RSRQ is influenced by adjacent station interference and thermal noise and thus, when only RSRQ is utilized, achieves less precision than RSRP estimates. On the other hand, the accuracy of the RSRQ-based system is better than that by the RSRP signals when RSRQ values are used together with RSRP values [56].
3. Radio Signals-Based Positioning
This section describes radio and non-radio-based systems for IPS, depicted in Figure 7. A GPS that receives signals from satellites is broadly used and very popular in outdoor localization applications, but it is ineffective for indoor localization due to the LoS transmission problem. Therefore, various wireless technologies such as infrared, optical (LED, laser), ultrasound, an IMU, vision, VLC, and the radio signals—including Wi-Fi, ZigBee, RFID, Bluetooth low energy (BLE), UWB, long-range radio (LoRa), sigfox, near field communication (NFC) and cellular networks—have been used in IPS. In addition, some of the works have been utilized in hybrid approaches for indoor positioning and tracking. This paper will discuss only the radio signal technologies.
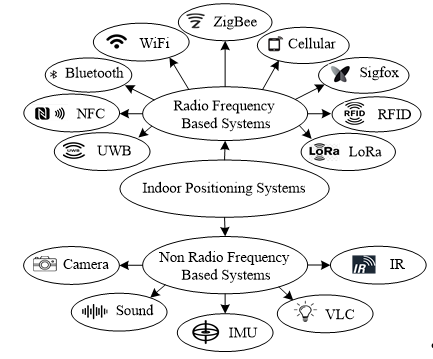
Figure 7. Categorization of indoor positioning technologies.
3.1. Wi-Fi Technology
Wi-Fi, which is a wireless local area network (WLAN), is a well known technology in broadband communications, specifically for machine-to-machine schemes and human communication [58]. The Wireless Ethernet IEEE 802.11 (Wi-Fi) devices generally transmit over 2.4 GHz, nevertheless, now 5 GHz is extensively being utilized for transmission due to less interference, less noise, higher constant connection, and enhanced speed [59]. The Wi-Fi network is available through mobile devices such as laptops, tablets, mobile phones and others in consequence of an active saleable off-the-self simple infrastructure for an IPS [60][61]. Wi-Fi signal is used to focus the problem of indoor positioning and tracking, due to the ubiquitous placement of Wi-Fi access points, low cost over other indoor wireless technologies, low energy consumption, and without additional hardware requirements [62]. Several algorithms and ranging parameters have been presented to increase Wi-Fi-based IPS; however, most of the algorithms and measurement solutions need large computing properties and specific hardware [63]. Wi-Fi localization algorithms are introduced, including an AOA-based algorithm (triangulation) [64], trilateration algorithm [65], RSSI-based fingerprinting algorithm [66][67] and CSI-based fingerprinting algorithm [68].
Among the algorithms, the fingerprinting algorithm and the trilateration algorithm are often employed in Wi-Fi-based indoor localization. However, fingerprinting localization algorithms give the best performance and attract the researcher’s attention due to easy implementation, low complexity, no need for the LoS measurements of APs and specialized hardware [69]. The average localization errors are described as 2~3 m in Wi-Fi-based positioning algorithms [57]. Wireless signals of Wi-Fi access points can protect huge areas, however, they need multipart hardware and software collaboration with each other [70]. In addition, Wi-Fi-based positioning implementation can be extremely affected by environmental effects such as the geography of the barrier, people’s mobility or crowdedness, and weather [57]. The multipath failing of Wi-Fi signals affects the time-varying RSSI of signals that influence the precision of the Wi-Fi location. Furthermore, Wi-Fi scanning time, around 3~4 s in common smartphones, gives the low quality of its services in the context of a refreshment time [57].
3.2. Bluetooth Technology
Bluetooth low energy (BLE) is mostly supported by smart devices today. It is based on the Institute of Electrical and Electronics Engineers (IEEE) 802.15 standard. The Bluetooth 4.0 protocol was distributed and it was announced in 2010 [71]. BLE signal is a kind of electromagnetic signal that works in the range from 2.4 GHz to 2.4835 GHz band in Industrial Scientific and Medical (ISM) [72]. In 2013, a new iBeacon technology was presented by Apple Inc. The iBeacon technology was created based on BLE technology that can send directly with smartphones and it is has lower power and a lower cost than conventional Bluetooth and Wi-Fi technologies [73][74][75][76]. In addition, the launch of Google’s EddystoneTM open standard in 2015 produced new and better broadcast formats that have aided in the development of interest in the widespread use and embedding of Bluetooth beacon platforms [77].
BLE is designed with very short ranged wireless transmissions. Hence, the estimated errors using Wi-Fi-based systems are normally much higher than those in BLE-based systems [78]. The sensing length of Bluetooth is at most 10 m, with great power cost and is only ideal for a small space [38]. Bluetooth devices are varied because of different productions, rated voltage, and energy, and therefore, the RSS can change as much as 20 dBm [79]. Moreover, in reality, Bluetooth broadcast power takes time-varying characteristics [74].
Although the Bluetooth-based system needs further hardware devices in contrast with the Wi-Fi-based system, it can attain accuracies in the range of 1.2 m [62]. In addition, low power Bluetooth is chosen in indoor positioning systems and IoT applications because of advantages such as low cost, low power (0.367 mW average power consumption) [73], small size and easy deployment [80][81][82][83]. It can be as extended as much as 100 m by adjusting the broadcast power, which creates the possibility of a wider range of indoor positioning using Bluetooth 4.0 [84]. The Bluetooth-based indoor location system mainly use proximity detection, trilateration, and fingerprinting. However, the positioning accuracy will be affected by the stability of the Bluetooth node and the indoor propagating environment. Several experiments with the Bluetooth scheme show that accurate positioning needs additional exploration [71]. Furthermore, Bluetooth technology obstructs Wi-Fi for the reason that they share the same frequency band [57].
3.3. ZigBee Technology
The ZigBee technology is a short-range wireless communication technology, based on the IEEE 802.15.4 standard as its medium access control (MAC) layer and physical layer (PHY) standard. It operates at the 2.4 GHz frequency with a lower bit rate. ZigBee can be applied with a star, tree networks, and mesh networks by relating to a microcontroller [85][86][87]. The ZigBee design classifies three types of devices such as the ZigBee coordinator, ZigBee Router, and ZigBee End Device that combines ZigBee radios. A ZigBee End Device is cheaper to produce than a ZigBee coordinator or ZigBee Router [18].
ZigBee devices can control their own data and prevent some data damage by using carrier-sense multiple access/collision avoidance (CSMA/CA). ZigBee devices are defined by aspects, for instance, of energy detection and link characteristics that permit RSS measurements to be simply resolved. ZigBee technology has a wider range than BLE technology, as such it is able to communicate further by using a mesh network of relay nodes to arrive at a destination [73]. The ZigBee-based localization system used to link quality indication (LQI) instead of the RSSI [88]. The ZigBee standard-based wireless technology has many advantages such as its low cost, low power (17.68 mW average power consumption) [73], safety, reliability, robustness, and low data rates. In addition to its light weight, it has low-bandwidth and a faster computation processing. [89][90][91].
The ZigBee technology was commonly used to measure indoor positioning and tracking previously because of its advantages [92][93]. Conversely, ZigBee-based positioning impacts accuracy because of the interference and strength of the signals [70]. ZigBee positioning also has a definite constraint on positioning in real time when using RSSI, due to the short-range and great latency shortcoming of 802.15.4 wireless technology [84]. Furthermore, it requires extra hardware and is not a trend among current IoT users. The low power features of ZigBee technology have not happened because of its limitations in data transmissions. This network usually allows a device to succeed in its data transmission over almost 100 m despite its low powered characteristics. In the network, each node can connect directly with other nodes or through neighbouring nodes in the network [94][95].
3.4. RFID Technology
RFID is a wireless non-contact technology that obtains automatic identification by transmitting data from an RFID tag to the reader through an electromagnetic signal. Generally, RFID technology consists of a reader, tags, and a computer [96]. RFID technologies are based on an active tag technology [97] and passive tag technology [98][99]. Active tags have a larger detecting range using high power consumption and higher cost, although the passive tags are appropriate for short distance static point location, and only applicable for a small space [70]. However, RFID passive tags are more common than active RFID tags in localization systems. Furthermore, RFID technologies achieved high improvement in the tracking of assets, warehousing, management, logistics, car inventory, personnel location, and robot navigation. Its advantages are a high read range, rapid read speed, low price, suitability for large-scale deployments, high security, battery-free tags, and scalability [96]. Moreover, RFID technology is widely used in industries other than in laser scanners, cameras, or ultrasound technology [100]. However, the localization approach based on RFID can easily be changed by the random moving objects in the domain, due to the multipath effect and signal fluctuation that reduce its accuracy. Moreover, due to diffraction, reflection, and NLoS, RFID signal transmissions are complex in an indoor environment. In addition, RFID signals collected from the real-time environment are noisy [101].
In many applications, the position identification of objects is also of extreme importance. Thus, the RFID technology-based localization has been analysed extensively. The RFID-based conventional localization systems usually use the characteristics of radio signals such as the signal strength, travel time, and direction. In RFID-based indoor localization systems, the triangulation methods, zone or building level solutions, and LANDMARC, a location sensing prototype methods, are usually developed to locate a target [102]. For the RFID-based ultra-high frequency position scheme, the power signals received by the readers have to be computed in the RSSI-based IPS. The RSSI based methods contain the referenced tag-based methods and distance-based methods. The distance-based algorithms create signal propagation models such as the free-space path-loss model, logarithmic distance model, and logarithmic normal distribution model for the signal power reduction and the signal propagation distance [103].
Furthermore, location tracking based on the RFID system can be divided into reader tracking and tag tracking [97]. In the RFID tag tracking, the target to be located is connected with an RFID tag. The RFID reader is positioned in the surroundings. When the target steps into the surroundings, the RFID reader stores the information. The RFID reader can either send the information to a centralized server, which computes the location, or collaborate with each other to compute the location by themselves. Then, the location outcome is returned to the target. In the reader tracking, each object to be localized brings in a reader in addition to an antenna integrated with the reader. The tags are installed in the surroundings. A reader acquires the information and estimates its position. Reader tracking decreases setup costs by using inexpensive tags [100]. The RFID reader positioning is also vital for RFID large-scale implementation. Therefore, the RFID reader positioning was investigated to develop a higher accurate positioning and tracking system for the indoor environment, and to improve the tracking performance that can be used for various active and passive RFID standards [104][105].
3.5. UWB Technology
UWB is an attractive technology in wireless sensor networks, which allows for very high data rates over a short distance because of its wide bandwidth. This broad bandwidth also involves a high temporal resolution, enabling a higher accuracy, and hence more accurate positioning of each target device in the network [106]. The IEEE 802.15.4a (UWB) wireless communication technologies are quickly developing and they will be in the 5G technology [107]. UWB transmission is described by its capacity to communicate short pulses with low-power spectral density in a high-frequency range, from 3.1 to 10.6 GHz. UWB wireless technology is an innovative technology for greater resolution in indoor positioning and tracking applications, such as in healthcare, medical facilities, construction sites, and sports [108][109]. Moreover, due to the nature of large bandwidth, UWB signals offer greater protection against interference. In addition, it has less impact on the human body due to the short-transmission power [110].
Localization based on UWB concentrates on the trilateration and angulation methods [111][112][113][114] on the unknown location of a target device using three or more beacon nodes. Range-based approaches such as TOA and TDOA have good accuracy and are most suited for localization and ranging for wireless networks because of the large bandwidth of UWB signals [22]. However, RSS is hardly utilized in UWB-based positioning systems, since distance calculation is less accurate compared with using the TOA, TDOA, and AOA-based method [115]. UWB technology has many advantages, including the protection of multipath intrusion, large data rate, convenience, low power consumption, and suitable for wearable networks and body-centric applications [116]. The UWB technologies are mostly focused on non-line- of-sight (NLoS) modifications [113]. It is able to offer centimetre and sub-metre accuracy for position measurement in an indoor localization system [117]. However, an ultra-wideband-based positioning system has many challenges for high-accuracy applications in buildings, which includes sampling rate limits, device synchronization, human-body shadowing effects, antenna phase-axis variation, and multipath interference. There are many reasons for a millimetre or sub-millimetre accuracy [111][112]. To make the higher range accuracy, the UWB-based positioning technologies require complex infrastructure and high cost [118].
3.6. Cellular Technology
Cellular wireless signals such as 2G, 3G, 4G, and 5G (millimetre wave technology) have been used for localization systems [119][120][121][122][123][124]. Also, the cellular implementations aim to give effective coverage in the indoor environment. Specifically, the new LTE signals have a large bandwidth, a structure and a synchronization frame that can create them, which are well matched for location determinations [125]. In 4G LTE web systems, the RSRP and RSRQ values are used to observe the signal strength. The RSRP is termed and received as a signal indicator. The RSRP and RSRQ are defined in the 3rd Generation Partnership Project (3GPP) typical design [126]. Normally, 3GPP LTE divides between the frequency division duplexing mode and the time-division duplexing mode. The time-division duplexing mode uses the same frequency while the frequency division duplexing mode uses two dissimilar frequency ranges for uplink and downlink.
The LTE downlink physical layer is constructed in accordance with the OFDM modulation. The LTE signal-based positioning systems consider a number of aspects. These signals should rather occur within the downlink with no operator demand, thus no precise operation of the system is required, preventing further cost and system traffic. The LTE signal would be excluded for a base position, therefore the signals from various base positions working on a similar frequency range can be divided. Furthermore, the bandwidth of the communicated signal would be exploited in the network bandwidth to give a frequency impulse response with better resolution [125].
The radio signal scatterings for base stations on various radio channels change with positions. Thus, a radio channel combination can support escape from misclassification instead of depending on one radio channel. In addition, the cellular signals are obtained by smartphones without extra cost. Furthermore, coarse location data can be obtained from cellular networks, although its precision is lacking for most indoor applications. Moreover, 2G cellular signals only apply averaged RSSI that is less crude, as it consists of power associating with thermal noise, serving cells, and co-channel cells [56]. The propagation channel actually disturbs the accuracy of an LTE-based localization system, which is unsuitable for location approximation in a distributed antenna system (DAS) [127]. Moreover, the LTE commercial systems are not developed for TDOA-based positioning system due to the non-compromise of positioning reference signals (PRS) and non-synchronized base stations [128].
References
- Rusli, M.E.; Ali, M.; Jamil, N.; Din, M.M. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT). In Proceedings of the 2016 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 26–27 July 2016; pp. 72–77. [Google Scholar]
- Hou, Z.-G.; Fang, L.; Yi, Y. An Improved Indoor UHF RFID Localization Method Based on Deviation Correction. In Proceedings of the 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–25 July 2017; pp. 1402–1405. [Google Scholar]
- Geok, T.K.; Hossain, F.; Kamaruddin, M.N.; Rahman, N.Z.A.; Thiagarajah, S.; Chiat, A.T.W.; Hossen, J.; Liew, C.P. A Comprehensive Review of Efficient Ray-Tracing Techniques for Wireless Communication. Int. J. Commun. Antenna Propag. (IRECAP) 2018, 8, 123. [Google Scholar] [CrossRef]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Tso, C.P.; Kamaruddin, M.N. A Smart 3D RT Method: Indoor Radio Wave Propagation Modelling at 28 GHz. Symmetry 2019, 11, 510. [Google Scholar] [CrossRef]
- Hossain, F.; Kim Geok, T.; Abd Rahman, T.; Nour Hindia, M.; Dimyati, K.; Ahmed, S.; Tso, C.P.; Abdaziz, A.; Lim, W.; Mahmud, A.; et al. Indoor 3-D RT Radio Wave Propagation Prediction Method: PL and RSSI Modeling Validation by Measurement at 4.5 GHz. Electronics 2019, 8, 750. [Google Scholar] [CrossRef]
- Geok, T.K.; Hossain, F.; Chiat, A.T.W. A novel 3D ray launching technique for radio propagation prediction in indoor environments. PLoS ONE 2018, 13, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Abdaziz, A. Indoor Millimeter-Wave Propagation Prediction by Measurement and Ray Tracing Simulation at 38 GHz. Symmetry 2018, 10, 464. [Google Scholar] [CrossRef]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Ahmed, S.; Tso, C.P.; Rahman, N.Z.A. An Efficient 3-D Ray Tracing Method: Prediction of Indoor Radio Propagation at 28 GHz in 5G Network. Electron. 2019, 8, 286. [Google Scholar] [CrossRef]
- Qasem, S.A.; Geok, T.K.; Alias, M.Y.; Hossain, F.; Alsowaidi, N. Design and Analysis of Wideband Dielectric Resonator Antenna with Bandwidth and Gain Enhancement for C-Band Applications. Int. Rev. Model. Simul. (IREMOS) 2018, 11, 352. [Google Scholar] [CrossRef]
- Wang, X.; Mao, S.; Pandey, S.; Agrawal, P. CA2T: Cooperative Antenna Arrays Technique for Pinpoint Indoor Localization. Procedia Comput. Sci. 2014, 34, 392–399. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Fei, H.; Xiao, F.; Sheng, B.; Huang, H.; Sun, L. Motion Path Reconstruction in Indoor Environment Using Commodity Wi-Fi. IEEE Trans. Veh. Technol. 2019, 68, 7668–7678. [Google Scholar] [CrossRef]
- Sayeef, S.; Madawala, U.; Handley, P.; Santoso, D. Indoor personnel tracking using infrared beam scanning. In Proceedings of the IEEE Symposium on Position Location and Navigation (PLANS) (IEEE Cat. No. 04CH37556), Monterey, CA, USA, 26–29 April 2004; pp. 698–705. [Google Scholar]
- Kemper, J.; Linde, H. Challenges of passive infrared indoor localization. In Proceedings of the IEEE 5th WPNC’08, Hannover, Germany, 27 March 2008; pp. 63–70. [Google Scholar]
- Khan, L.U. Visible light communication: Applications, architecture, standardization and research challenges. Digit. Commun. Netw. 2017, 3, 78–88. [Google Scholar] [CrossRef]
- Ergul, O.; Dinc, E.; Akan, O.B. Communicate to illuminate: State-of-the-art and research challenges for visible light communications. Phys. Commun. 2015, 17, 72–85. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Dong, Y.; Shan, F.; Dou, G.; Cui, Y. The Research and Application of Indoor Location Algorithm Based on Wireless Sensor Network. In Proceedings of the IEEE 3rd International Confernce Communication Software and Networks, Xi’an, China, 27–29 May 2011; pp. 719–722. [Google Scholar]
- Cui, W.; Zhang, L.; Li, B.; Guo, J.; Meng, W.; Wang, H.; Xie, L. Received Signal Strength Based Indoor Positioning Using a Random Vector Functional Link Network. IEEE Trans. Ind. Informatics 2018, 14, 1846–1855. [Google Scholar] [CrossRef]
- Zafari, F.; Member, S.; Papapanagiotou, I.; Member, S. An iBeacon Based Proximity and Indoor Localization System. arXiv 2017, arXiv:1703.07876. [Google Scholar]
- Ab Razak, A.A.W.; Samsuri, F. Active RFID-based Indoor Positioning System (IPS) for Industrial Environment. In Proceedings of the 2015 IEEE International RF and Microwave Conference (RFM), Kuching, Malaysia, 14–16 December 2015; pp. 89–91. [Google Scholar]
- Bharadwaj, R.; Parini, C.; Alomainy, A. Experimental Investigation of 3-D Human Body Localization Using Wearable Ultra-Wideband Antennas. IEEE Trans. Antennas Propag. 2015, 63, 5035–5044. [Google Scholar] [CrossRef]
- Chen, R. A Novel Method for Indoor Location Identification. In Proceedings of the IEEE 2nd International Symposium on Aware Computing, Tainan, China, 1–4 November 2010; pp. 257–262. [Google Scholar]
- Chen, S.W.; Seow, C.K.; Tan, S.Y. Elliptical Lagrange-Based NLOS Tracking Localization Scheme. IEEE Trans. Wirel. Commun. 2016, 15, 3212–3225. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Kulaib, A.R.; Shubair, R.M.; Ng, J.W.P. An Overview of Localization Techniques for Wireless Sensor Networks. In Proceedings of the 2011 International Conference on Innovations in Information Technology, Abu Dhabi, UAE, 25–27 April 2011; pp. 167–172. [Google Scholar]
- Li, Z.; Dimitrova, D.C.; Raluy, D.H.; Braun, T. TDOA for Narrow-band Signal with Low Sampling Rate and Imperfect Synchronization. In Proceedings of the IEEE 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–24 May 2014. [Google Scholar]
- Want, R.; Wang, W.; Chesnutt, S. Accurate Indoor Location for the IoT. Computer 2018, 51, 66–70. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Jathe, N.; Lütjen, M.; Freitag, M. Indoor Positioning in Car Parks by using Wi-Fi Round-Trip-Time to support Finished Vehicle Logistics on Port Terminals. IFAC-PapersOnLine 2019, 52, 857–862. [Google Scholar] [CrossRef]
- Horn, B.K.P. Doubling the Accuracy of Indoor Positioning: Frequency Diversity. Sensors 2020, 20, 1489. [Google Scholar] [CrossRef]
- Peng, R.; Sichitiu, M.L. Angle of Arrival Localization for Wireless Sensor Networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; pp. 374–382. [Google Scholar]
- Silva, B.; Pang, Z.; Akerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-based High Precision Localization for Industrial Applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-dubai, A. Simultaneous Context Inference and Mapping using mm-Wave for Indoor Scenarios. In Proceedings of the IEEE International Confencence on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L. Localization Technologies for Indoor Human Tracking. In Proceedings of the IEEE 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010. [Google Scholar]
- Bergen, M.H.; Schaal, F.S.; Klukas, R.; Cheng, J.; Holzman, J.F. Toward the implementation of a universal angle-based optical indoor positioning system. Front. Optoelectron. 2018, 11, 116–127. [Google Scholar] [CrossRef]
- Zhu, B.; Cheng, J.; Wang, Y.; Yan, J.; Wang, J. Three-Dimensional VLC Positioning Based on Angle Difference of Arrival with Arbitrary Tilting Angle of Receiver. IEEE J. Sel. Areas Commun. 2017, 36, 8–22. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.-S. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef]
- Brás, L.; Carvalho, N.B.; Pinho, P.; Kulas, L.; Nyka, K. A Review of Antennas for Indoor Positioning Systems. Int. J. Antennas Propag. 2012, 2012, 1–14. [Google Scholar] [CrossRef]
- Hafiizh, A.; Imai, F.; Minami, M.; Ikeda, K.; Obote, S.; Kagoshima, K. Study of DOA-based indoor location positioning utilizing MIMO WLAN system in typical room environment. In Proceedings of the ISAP2007, Niigata, Japan, 20–24 August 2007. [Google Scholar]
- Cidronali, A.; Collodi, G.; Maddio, S.; Passafiume, M.; Pelosi, G. 2-D DoA Anchor Suitable for Indoor Positioning Systems Based on Space and Frequency Diversity for Legacy WLAN. IEEE Microw. Wirel. Components Lett. 2018, 28, 627–629. [Google Scholar] [CrossRef]
- Grenier, D.; Elahian, B.; Blanchard-Lapierre, A. Joint delay and direction of arrivals estimation in mobile communications. Signal Image Video Process. 2014, 10, 45–54. [Google Scholar] [CrossRef]
- Scherhaufl, M.; Pichler, M.; Schimback, E.; Muller, D.J.; Ziroff, A.; Stelzer, A. Indoor Localization of Passive UHF RFID Tags Based on Phase-of-Arrival Evaluation. IEEE Trans. Microw. Theory Tech. 2013, 61, 4724–4729. [Google Scholar] [CrossRef]
- Qiu, L.; Li, S.; Huang, Z.; Zhang, S.; Jing, C.; Li, H. Multifrequency Phase Difference of Arrival Range Measurement: Principle, Implementation, and Evaluation. Int. J. Distrib. Sens. Netw. 2015, 11, 715307. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef]
- Tsai, H.; Chiu, C.; Tseng, P.; Feng, K. Refined Autoencoder-based CSI Hidden Feature Extraction for Indoor Spot Localization. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor Localization via Channel Response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Song, Q.; Guo, S.; Liu, X.; Yang, Y. CSI Amplitude Fingerprinting-Based NB-IoT Indoor Localization. IEEE Internet Things J. 2018, 5, 1494–1504. [Google Scholar] [CrossRef]
- Ma, R.; Yu, G.-J.; Chen, G.; Zhao, S.; Yang, B. Hierarchical CSI-fingerprints Classification for Passive Multi-person Localization. In Proceedings of the 2017 International Conference on Networking and Network Applications, Kathmandu, Nepal, 16–19 October 2017; pp. 112–117. [Google Scholar]
- He, D.; Bouras, T.; Chen, X.; Yu, W.; Zhang, Y.; Yang, Y. 3-D Spatial Spectrum Fusion Indoor Localization Algorithm Based on CSI-UCA Smoothing Technique. IEEE Access 2018, 6, 59575–59588. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2016, 66, 1. [Google Scholar] [CrossRef]
- Samadh, S.A.; Liu, Q.; Liu, X.; Ghourchian, N.; Allegue, M. Indoor Localization Based on Channel State Information. In Proceedings of the 2019 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Orlando, FL, USA, 20–23 January 2019. [Google Scholar]
- Tong, X.; Li, H.; Tian, X.; Wang, X. Triangular Antenna Layout Facilitates Deployability of CSI Indoor Localization Systems. In Proceedings of the 2019 16th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Boston, MA, USA, 10–13 June 2019. [Google Scholar]
- Kui, W.; Mao, S.; Hei, X.; Li, F. Towards Accurate Indoor Localization using Channel State Information. In Proceedings of the IEEE International Confernce Consumer Electronics-Taiwan (ICCE-TW), Taichung, Taiwan, 19–21 May 2018. [Google Scholar]
- Poosamani, N.; Rhee, I. Towards a practical indoor location matching system using 4G LTE PHY layer information. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), St. Louis, MO, USA, 23–27 March 2015; pp. 284–287. [Google Scholar]
- Kim, B.; Kwak, M.; Lee, J.; Kwon, T.T. A Mulit-proned Approach for indoor Positioning with Wi-Fi, Magnetic and Cellular Signals. In Proceedings of the International Confernce on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 723–726. [Google Scholar]
- Hsieh, H.-Y.; Prakosa, S.W.; Leu, J.-S. Towards the Implementation of Recurrent Neural Network Schemes for WiFi Fingerprint-Based Indoor Positioning. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018. [Google Scholar]
- Ding, N.; Wagner, D.; Chen, X.; Pathak, A.; Hu, Y.C.; Rice, A. Characterizing and modeling the impact of wireless signal strength on smartphone battery drain. ACM Sigmetrics Perform. Eval. Rev. 2013, 41, 29–40. [Google Scholar] [CrossRef]
- Sosa-Sesma, S.; Perez-Navarro, A. Fusion System Based on Wi-Fi and Ultrasounds for In-home Positioning Systems: The UTOPIA. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Molina, B.; Olivares, E.; Palau, C.; Esteve, M. A Multimodal Fingerprint-Based Indoor Positioning System for Airports. IEEE Access 2018, 6, 10092–10106. [Google Scholar] [CrossRef]
- Thuong, N.T.; Phong, H.T.; Do, D.; van Hieu, P.; Loc, D.T. Android Application for Wi-Fi Based Indoor Position: System Design and Performance Analysis. In Proceedings of the 2016 International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia, 13–15 January 2016; pp. 416–419. [Google Scholar]
- Shi, S.; Sigg, S.; Chen, L.; Ji, Y. Accurate Location Tracking From CSI-Based Passive Device-Free Probabilistic Fingerprinting. IEEE Trans. Veh. Technol. 2018, 67, 5217–5523. [Google Scholar] [CrossRef]
- Cidronali, A.; Maddio, S.; Giorgetti, G.; Manes, G. Analysis and Performance of a Smart Antenna for 2.45-GHz Single-Anchor Indoor Positioning. IEEE Trans. Microw. Theory Tech. 2010, 58, 21–31. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, S.; Chen, C.L.P. TOA-Based Passive Localization in Quasi-Synchronous Networks. IEEE Commun. Lett. 2014, 18, 592–595. [Google Scholar] [CrossRef]
- Ren, J.; Wang, Y.; Niu, C.; Song, W.; Huang, S. A Novel Clustering Algorithm for Wi-Fi Indoor Positioning. IEEE Access 2019, 7, 122428–122434. [Google Scholar] [CrossRef]
- Ren, J.; Wang, Y.; Niu, C.; Song, W.; Yunan, W.; Changliu, N.; Wei, S. A Novel High Precision and Low Consumption Indoor Positioning Algorithm for Internet of Things. IEEE Access 2019, 7, 86874–86883. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor Wi-Fi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Jaffe, A.; Wax, M. Single-Site Localization via Maximum Discrimination Multipath Fingerprinting. IEEE Trans. Signal Process. 2014, 62, 1718–1728. [Google Scholar] [CrossRef]
- Chu, C.-H.; Wang, C.-H.; Liang, C.-K.; Ouyang, W.; Cai, J.-H.; Chen, Y.-H. High-Accuracy Indoor Personnel Tracking System with a ZigBee Wireless Sensor Network. In Proceedings of the 2011 Seventh International Conference on Mobile Ad-hoc and Sensor Networks, Beijing, China, 16–18 December 2011; pp. 398–402. [Google Scholar]
- Yu, N.; Zhan, X.; Zhao, S.; Wu, Y.; Feng, R. A Precise Dead Reckoning Algorithm Based on Bluetooth and Multiple Sensors. IEEE Internet Things J. 2018, 5, 336–351. [Google Scholar] [CrossRef]
- Chowdhury, T.I.; Rahman, M.M.; Parvez, S.; Alam, A.K.M.M.; Basher, A.; Alam, A. A Multi-step Approach for RSSI-Based Distance Estimation Using Smartphones. In Proceedings of the 2015 International Conference on Networking Systems and Security (NSysS), Dhaka, Bangladesh, 5–7 January 2015. [Google Scholar]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, Z.; Xu, Y.; Zhu, H. An Indoor Positioning Algorithm Based on RSSI Real-time Correction. In Proceedings of the 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 129–133. [Google Scholar]
- Feng, Z.; Mo, L.; Li, M. Analysis of Low Energy Consumption Wireless Sensor with BLE. In Proceedings of the IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar]
- Liu, D.-Y.; Wang, C.-S.; Hsu, K.-S. Beacon applications in information services. In Proceedings of the 2016 International Conference on Advanced Materials for Science and Engineering (ICAMSE), Tainan, Taiwan, 12–13 November 2016; pp. 438–440. [Google Scholar]
- Dickinson, P.; Cielniak, G.; Szymanezyk, O.; Mannion, M. Indoor Positioning of Shoppers Using a Network of Bluetooth Low Energy Beacons. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Sou, S.-I.; Lin, W.-H.; Lan, K.-C.; Lin, C.-S. Indoor Location Learning Over Wireless Fingerprinting System With Particle Markov Chain Model. IEEE Access 2019, 7, 8713–8725. [Google Scholar] [CrossRef]
- Paek, J.; Ko, J.; Shin, H. A Measurement Study of BLE iBeacon and Geometric Adjustment Scheme for Indoor Location-Based Mobile Applications. Mob. Inf. Syst. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Sthapit, P.; Gang, H.-S.; Pyun, J.-Y.; Pyurr, J.-Y. Bluetooth Based Indoor Positioning Using Machine Learning Algorithms. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics—Asia (ICCE-Asia), Jeju, Korea, 24–26 June 2018; pp. 206–212. [Google Scholar]
- Jeon, J.; Kong, Y.; Nam, Y. An Indoor Positioning System using Bluetooth RSSI with an Accelerometer and a Barometer on a Smartphone. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 528–531. [Google Scholar]
- Leong, C.Y.; Perumal, T.; Yaakob, R.; Peng, K.W. Enhancing Indoor Positioning Service for Location Based Internet of Thinngs (IOT): A Source Selecting Approach with Error Compensation. In Proceedings of the IEEE International Symposium on Consumer Electronics (ISCE), Kuala Lumpur, Malaysia, 14–15 November 2017; pp. 52–55. [Google Scholar]
- Chen, W.-C.; Kao, K.-F.; Chang, Y.-T.; Chang, C.-H. An RSSI-based distributed real-time indoor positioning framework. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1288–1291. [Google Scholar]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the IEEE International Confernce on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 526–533. [Google Scholar]
- Dong, Z.; Mengjiao, C.; Wenjuan, L. Implementation of indoor fingerprint positioning based on ZigBee. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 2654–2659. [Google Scholar]
- Torat, K.; Promwong, S. Extension of Quadratic Means for Weighted Centroid Localization with ZigBee Technology. In Proceedings of the 2017 21st International Computer Science and Engineering Conference (ICSEC), Bangkok, Thailand, 15–18 November 2017. [Google Scholar]
- Barrau, F.; Paille, B.; Kussener, E.; Goguenheim, D. Distance measurement using narrowband ZigBee devices. In Proceedings of the 2014 23rd Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 9–10 May 2014. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. ZigBee-based wireless sensor network localization for cattle monitoring in grazing fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Chuenurajit, T.; Phimmasean, S.; Cherntanomwong, P. Robustness of 3D indoor localization based on fingerprint technique in wireless sensor networks. In Proceedings of the 2013 10th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 15–17 May 2013. [Google Scholar]
- Gharghan, S.K.; Nordin, R.; Ismail, M. Statistical Validation of Performance of ZigBee-based Wireless Sensor Network for Track Cycling. In Proceedings of the International Conference on Smart Sensors and Applications, Kuala Lumpur, Malaysia, 26–28 May 2015; pp. 44–49. [Google Scholar]
- Mhamdi, J.; El Abkari, S. Contriving an RFID system for Alzheimer patients tracking. In Proceedings of the 2015 Third International Workshop on RFID and Adaptive Wireless Sensor Networks (RAWSN), Agadir, Morocco, 13–15 May 2015; pp. 23–28. [Google Scholar]
- Yan, D.; Kang, B.; Zhong, H.; Wang, R. Research on positioning system based on Zigbee communication. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1027–1030. [Google Scholar]
- Habaebi, M.H.; Khamis, R.O.; Zyout, A.; Islam, M.R. RSSI Based Localization Techniques for Zigbee Wireless Swensor Network. In Proceedings of the 2014 IEEE International Confernce on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 23–25 September 2014; pp. 72–75. [Google Scholar]
- Lee, W.C.; Hung, F.H.; Tsang, K.F.; Wu, C.K.; Chi, H.R. RSS-based localization algorithm for indoor patient tracking. In Proceedings of the 2016 IEEE 14th International Conference on Industrial Informatics (INDIN), Poitiers, France, 19–21 July 2016; pp. 1060–1064. [Google Scholar]
- Ros, M.; Schoots, B.; D’Souza, M. Using context-aware sub sorting of received signal strength fingerprints for indoor localisation. In Proceedings of the 2012 6th International Conference on Signal Processing and Communication Systems, Gold Coast, Australia, 12–14 December 2012. [Google Scholar]
- Lo, L.; Li, C. Passive UHF-RFID Localization Based on the Similarity Measurement of Virtual Reference Tags. IEEE Trans. Instrum. Meas. 2019, 68, 2926–2933. [Google Scholar]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003. [Google Scholar]
- Hasani, M.; Talvitie, J.; Sydanheimo, L.; Lohan, E.S.; Ukkonen, L. Hybrid WLAN-RFID Indoor Localization Solution Utilizing Textile Tag. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1. [Google Scholar] [CrossRef]
- Bartoletti, S.; DeCarli, N.; Dardari, D.; Chiani, M.; Conti, A. Order-of-Arrival of Tagged Objects. IEEE J. Radio Freq. Identif. 2018, 2, 185–196. [Google Scholar] [CrossRef]
- Yang, L.; Cao, J.; Zhu, W.; Tang, S. Accurate and Efficient Object Tracking Based on Passive RFID. IEEE Trans. Mob. Comput. 2015, 14, 2188–2200. [Google Scholar] [CrossRef]
- Li, J.-Q.; Feng, G.; Wei, W.; Luo, C.; Cheng, L.; Wang, H.; Song, H.; Ming, Z. PSOTrack: A RFID-Based System for Random Moving Objects Tracking in Unconstrained Indoor Environment. IEEE Internet Things J. 2018, 5, 4632–4641. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B. Performance-based evaluation of RFID-based indoor location sensing solutions for the built environment. Adv. Eng. Inform. 2011, 25, 535–546. [Google Scholar] [CrossRef]
- Papapostolou, A.; Chaouchi, H. RFID-assisted indoor localization and the impact of interference on its performance. J. Netw. Comput. Appl. 2011, 34, 902–913. [Google Scholar] [CrossRef]
- Reza, A.W.; Geok, T.K.; Dimyati, K. Tracking via Square Grid of RFID Reader Positioning and Diffusion Algorithm. Wirel. Pers. Commun. 2010, 61, 227–250. [Google Scholar] [CrossRef]
- Reza, A.W.; Geok, T.K. Objects Tracking in A Dense reader Environment Utilising Grids of RFID Antenna Poitioning. Int. J. Electron. 2009, 96, 1281–1307. [Google Scholar] [CrossRef]
- Hanssens, B.; Plets, D.; Tanghe, E.; Oestges, C.; Gaillot, D.P.; Lienard, M.; Li, T.; Steendam, H.; Martens, L.; Joseph, W. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters. IEEE Trans. Antennas Propag. 2018, 66, 2522–2533. [Google Scholar] [CrossRef]
- Chaisang, A.; Promwong, S. Indoor Localization Distance Error Analysis with UWB Wireless Propagation Model Using Positioning Method. In Proceedings of the 2018 International Conference on Digital Arts, Media and Technology (ICDAMT), Phayao, Thailand, 25–28 February 2018; pp. 254–257. [Google Scholar]
- Mahfouz, M.R.; Kuhn, M.J. UWB Channel Measurements and Modeling for Positioning and Communications Systems in the Operating Room. In Proceedings of the 2011 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems, Phoenix, AZ, USA, 16–19 January 2011; pp. 47–50. [Google Scholar]
- Bharadwaj, R.; Swaisaenyakorn, S.; Parini, C.G.; Batchelor, J.C.; Alomainy, A. Impulse Radio Ultra-Wideband Communications for Localization and Tracking of Human Body and Limbs Movement for Healthcare Applications. IEEE Trans. Antennas Propag. 2017, 65, 7298–7309. [Google Scholar] [CrossRef]
- Mekonnen, Z.W.; Slottke, E.; Luecken, H.; Steiner, C.; Wittneben, A. Constrained maximum likelihood positioning for UWB based human motion tracking. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Hernandez, A.; Badorrey, R.; Chóliz, J.; Alastruey, I.; Valdovinos, A. Accurate indoor wireless location with IR UWB systems a performance evaluation of joint receiver structures and TOA based mechanism. IEEE Trans. Consum. Electron. 2008, 54, 381–389. [Google Scholar] [CrossRef]
- Mahfouz, M.R.; Zhang, C.; Merkl, B.C.; Kuhn, M.; Fathy, A. Investigation of High-Accuracy Indoor 3-D Positioning Using UWB Technology. IEEE Trans. Microw. Theory Tech. 2008, 56, 1316–1330. [Google Scholar] [CrossRef]
- Kim, H.J.; Xie, Y.; Yang, H.; Lee, C.; Song, T.L. An Efficient Indoor Target Tracking Algorithm Using TDOA Measurements with Applications to Ultra-Wideband Systems. IEEE Access 2019, 7, 91435–91445. [Google Scholar] [CrossRef]
- Selimis, G.; Romme, J.; Pflug, H.; Philips, K.; Dolmans, G.; De Groot, H. Sub-meter UWB localization: Low complexity design and evaluation in a real localization system. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 186–191. [Google Scholar]
- Sang, C.L.; Adams, M.; Korthals, T.; Hormann, T.; Hesse, M.; Ruckert, U. A Bidirectional Object Tracking and Navigation System using a True-Range Multilateration Method. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019. [Google Scholar]
- Gezici, S.; Poor, H.V. Position Estimation via Ultra-Wide-Band Signals. Proc. IEEE 2009, 97, 386–403. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.-K.; Salcic, Z. Human Body Shadowing Effect on UWB-Based Ranging System for Pedestrian Tracking. IEEE Trans. Instrum. Meas. 2019, 68, 4028–4037. [Google Scholar] [CrossRef]
- Xu, Y.; Ahn, C.K.; Shmaliy, Y.S.; Chen, X.; Li, Y. Adaptive Robust INS / UWB-integrated Human Tracking Using UFIR Filter Bank. Measurement 2018, 123, 1–7. [Google Scholar] [CrossRef]
- Pei, D.; Gong, J.; Xu, X. An HMM-Based Localization Scheme Using Adaptive Forward Algorithm for LTE Networks. In Proceedings of the 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018. [Google Scholar]
- Rastorgueva-foi, E.; Koivisto, M.; Lepp, K. Dynamic Beam Selection for Beam-RSRP Based Direction Finding in mmW 5G Networks. In Proceedings of the IEEE International Confernce Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar]
- Mirowski, P.; Ho, T.K.; Yi, S.; Macdonald, M. SignalSLAM: Simultaneous localization and mapping with mixed WiFi, Bluetooth, LTE and magnetic signals. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Varshavsky, A.; De Lara, E.; Hightower, J.; Lamarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Laitinen, H.; Lahteenmaki, J.; Nordstrom, T. Database Correlation Method for GSM Location. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Rhodes, Greece, 6–9 May 2001; Volume 4, pp. 2504–2508. [Google Scholar]
- Rastorgueva-foi, E.; Koivisto, M.; Lepp, K. User Positioning in mmW 5G Networks using Beam-RSRP Measurements and Kalman Filtering. In Proceedings of the IEEE 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1150–1156. [Google Scholar]
- Driusso, M.; Marshall, C.; Sabathy, M.; Knutti, F.; Mathis, H.; Babich, F. Indoor Positioning Using LTE Signals. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Liu, C.; Tian, Z.; Zhou, M.; Yang, X. Gene-Sequencing-Based Indoor Localization in Distributed Antenna System. IEEE Sens. J. 2017, 17, 6019–6028. [Google Scholar] [CrossRef]
- Loyez, C.; Bocquet, M.; Lethien, C.; Rolland, N. A Distributed Antenna System for Indoor Accurate WiFi Localization. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1184–1187. [Google Scholar] [CrossRef]
- Seco-granados, G.; Crosta, P.; Zanier, F.; Crisci, M. Downlink Synchronization of LTE Base Stations for Opportunistic ToA Positioning. In Proceedings of the IEEE International Confernece on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 24–25 June 2015. [Google Scholar]
- Driusso, M.; Marshall, C.; Sabathy, M.; Knutti, F.; Mathis, H.; Babich, F. Indoor Positioning Using LTE Signals. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Liu, C.; Tian, Z.; Zhou, M.; Yang, X. Gene-Sequencing-Based Indoor Localization in Distributed Antenna System. IEEE Sens. J. 2017, 17, 6019–6028. [Google Scholar] [CrossRef]
- Loyez, C.; Bocquet, M.; Lethien, C.; Rolland, N. A Distributed Antenna System for Indoor Accurate WiFi Localization. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1184–1187. [Google Scholar] [CrossRef]
- Seco-granados, G.; Crosta, P.; Zanier, F.; Crisci, M. Downlink Synchronization of LTE Base Stations for Opportunistic ToA Positioning. In Proceedings of the IEEE International Confernece on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 24–25 June 2015. [Google Scholar]

