 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Saeid Fadaei | -- | 4639 | 2024-01-29 21:26:37 | | | |
| 2 | Lindsay Dong | Meta information modification | 4639 | 2024-01-30 02:45:19 | | |
Video Upload Options
The emerging industry of offshore wind turbines mounted on floating bases has garnered significant attention from both academia and industry. The desire to understand the complex physics of these floating structures has led to the development of numerical and physical modelling techniques. While physical testing has traditionally been employed, there is a growing focus on cost-effective and accurate high-fidelity numerical modelling as a potential alternative or supplement. However, commonly used numerical engineering tools in the offshore industry are considered mid- to low-fidelity and may lack the desired precision for floating offshore wind turbines (FOWTs). Given the complexity of these simulation codes, it is crucial to validate their accuracy.
1. Introduction
2. Structural Codes
3. Aerodynamic Codes
4. Hydrodynamic Codes
5. Mooring Codes
6. Numerical Simulation Tools
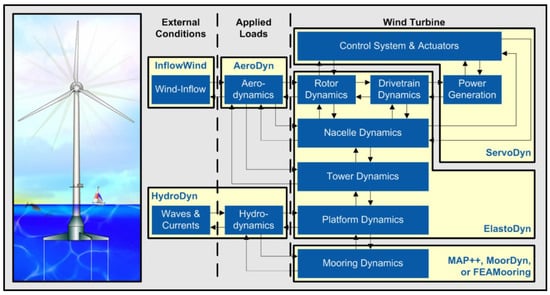
6.1. FAST Computer-Aided Engineering Tool
6.2. OrcaFlex
6.3. OPASS
6.4. Bladed
6.5. HAWC2
6.6. aNySIM
6.7. PHATAS
6.8. 3DFloat
6.9. DeepLines Wind
6.10. SAMCEF
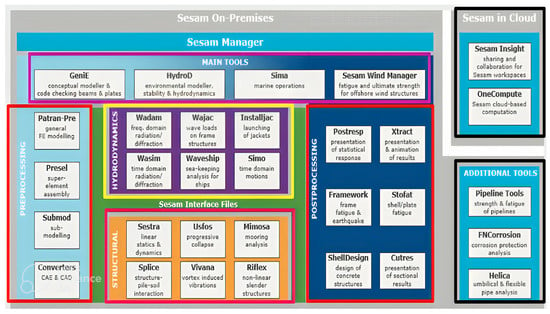
6.11. Sesam
6.12. UTWind
7. Summary
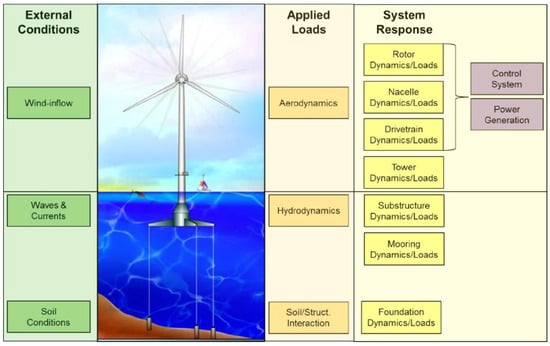
The investigation into FOWTs necessitates a comprehensive exploration of aerodynamic, structural, hydrodynamic, and mooring aspects. This intricate analysis aims to unravel the interconnected dynamics of aerodynamic forces, structural responses, hydrodynamic behaviors, and mooring system intricacies. As FOWTs stand at the forefront of renewable energy advancements, understanding the synergies and challenges within each domain becomes imperative. This multifaceted examination is pivotal for optimizing design, enhancing reliability, and maximizing the performance of FOWTs.
Aerodynamic loads are conventionally assessed using the BEM theory, a method combining momentum and blade element theories. Despite its efficiency in computation, BEM theory relies on assumptions such as rotor discretization as annuli, neglecting of root and tip losses, and consideration of steady flow. To enhance accuracy, correction models are introduced, addressing issues like hub and root losses. The BEM theory, while widely employed, requires further investigation, especially for FOWTs facing complex inflow wind conditions due to platform motions.
References
- Haghshenas, A.; Hasan, A.; Osen, O.; Mikalsen, E.T. Predictive digital twin for offshore wind farms. Energy Inform. 2023, 6, 1.
- Mei, D. A Race to the Top: China 2023; Technical Report; Global Energy Monitor: California, CA, USA, 2023.
- Christopher, T.R.; Goldstein, M.; Williams, M.; Carter, A. The Road to 30 Gigawatts: Key Actions to Scale an Offshore Wind Industry in the United States; Technical Report; Center for American Progress: Washington, DC, USA, 2022.
- Otter, A.; Murphy, J.; Pakrashi, V.; Robertson, A.; Desmond, C. A review of modelling techniques for floating offshore wind turbines. Wind Energy 2022, 25, 831–857.
- Robertson, A.; Jonkman, J.; Vorpahl, F.; Popko, W.; Qvist, J.; Frøyd, L.; Chen, X.; Azcona, J.; Uzunoglu, E.; Soares, C.G.; et al. Offshore code comparison collaboration continuation within IEA wind task 30: Phase II results regarding a floating semisubmersible wind system. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, San Francisco, CA, USA, 8–13 June 2014; Volume 45547, p. V09BT09A012.
- Sayed, M.; Klein, L.; Lutz, T.; Krämer, E. The impact of the aerodynamic model fidelity on the aeroelastic response of a multi-megawatt wind turbine. Renew. Energy 2019, 140, 304–318.
- Riziotis, V.A.; Voutsinas, S.G.; Politis, E.S.; Chaviaropoulos, P.K.; Hansen, A.M.; Madsen, H.A.; Rasmussen, F. Identification of structural non-linearities due to large deflections on a 5 MW wind turbine blade. In Proceedings of the Scientific Proceedings, Brussels, Belgium, 22–24 September 2008; pp. 9–14.
- Jeong, M.S.; Yoo, S.J.; Lee, I. Aeroelastic Analysis for Large Wind Turbine Rotor Blades. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011.
- Wang, L.; Liu, X.; Kolios, A. State of the art in the aeroelasticity of wind turbine blades: Aeroelastic modelling. Renew. Sustain. Energy Rev. 2016, 64, 195–210.
- Jonkman, J.M.; Musial, W. Offshore Code Comparison Collaboration (OC3) for IEA Wind Task 23 Offshore Wind Technology and Deployment; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2010.
- Popko, W.; Vorpahl, F.; Zuga, A.; Kohlmeier, M.; Jonkman, J.; Robertson, A.; Larsen, T.J.; Yde, A.; Sætertrø, K.; Okstad, K.M.; et al. Offshore Code Comparison Collaboration Continuation (OC4), Phase 1—Results of Coupled Simulations of an Offshore Wind Turbine with Jacket Support Structure. In ISOPE International Ocean and Polar Engineering Conference; ISOPE: Rhodes, Greece, 2012.
- Robertson, A.; Jonkman, J.M.; Musial, W.; Vorphal, F.; Popko, W. Offshore Code Comparison Collaboration, Continuation: Phase II Results of a Floating Semisubmersible Wind System. In Proceedings of the Roceedings, EWEA Offshore, Frankfurt, Germany, 19–21 November 2013.
- Robertson, A.N.; Wendt, F.F.; Jonkman, J.M.; Popko, W.; Vorpahl, F.; Stansberg, C.T.; Bachynski, E.E.; Bayati, I.; Beyer, F.; de Vaal, J.B.; et al. OC5 Project Phase I: Validation of Hydrodynamic Loading on a Fixed Cylinder. In ISOPE International Ocean and Polar Engineering Conference; ISOPE: Mountain View, CA, USA, 2015.
- Robertson, A.N.; Wendt, F.; Jonkman, J.M.; Popko, W.; Dagher, H.; Gueydon, S.; Qvist, J.; Vittori, F.; Azcona, J.; Uzunoglu, E.; et al. OC5 Project Phase II: Validation of Global Loads of the DeepCwind Floating Semisubmersible Wind Turbine. Energy Procedia 2017, 137, 38–57.
- Robertson, A.N.; Wendt, F.; Jonkman, J.M.; Popko, W.; Borg, M.; Bredmose, H.; Schlutter, F.; Qvist, J.; Bergua, R.; Harries, R.; et al. OC5 Project Phase Ib: Validation of Hydrodynamic Loading on a Fixed, Flexible Cylinder for Offshore Wind Applications. Energy Procedia 2016, 94, 82–101.
- Bergua, R.; Robertson, A.; Jonkman, J.; Branlard, E.; Fontanella, A.; Belloli, M.; Schito, P.; Zasso, A.; Persico, G.; Sanvito, A.; et al. OC6 project Phase III: Validation of the aerodynamic loading on a wind turbine rotor undergoing large motion caused by a floating support structure. Wind Energy Sci. 2023, 8, 465–485.
- Davidson, J.; Ringwood, J. Mathematical Modelling of Mooring Systems for Wave Energy Converters—A Review. Energies 2017, 10, 666.
- Masciola, M.; Jonkman, J.; Robertson, A. Extending the Capabilities of the Mooring Analysis Program: A Survey of Dynamic Mooring Line Theories for Integration Into FAST. In Proceedings of the Volume 9A: Ocean Renewable Energy, San Francisco, CA, USA, 8–13 June 2014.
- Walton, T.S.; Polachek, H. Calculation of transient motion of submerged cables. Math. Comput. 1960, 14, 27–46.
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Jonkman, J.M.; Wright, A.D.; Hayman, G.J.; Robertson, A.N. Full-System Linearization for Floating Offshore Wind Turbines in OpenFAST. In Proceedings of the ASME 2018 1st International Offshore Wind Technical Conference, San Francisco, CA, USA, 4–7 November 2018.
- Jonkman, J.M. Dynamics of offshore floating wind turbines-model development and verification. Wind Energy 2009, 12, 459–492.
- Arramounet, V.; de Winter, C.; Maljaars, N.; Girardin, S.; Robic, H. Development of coupling module between BHawC aeroelastic software and OrcaFlex for coupled dynamic analysis of floating wind turbines. J. Phys. Conf. Ser. 2019, 1356, 012007.
- Masciola, M.; Robertson, A.; Jonkman, J.; Coulling, A.; Goupee, A. Assessment of the Importance of Mooring Dynamics on the Global Response of the DeepCwind Floating Semisubmersible Offshore Wind Turbine. In Proceedings of the Twenty-Third International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013.
- Tran, T.T.; Kim, D.H. The coupled dynamic response computation for a semi-submersible platform of floating offshore wind turbine. J. Wind. Eng. Ind. Aerodyn. 2015, 147, 104–119.
- Masciola, M.; Robertson, A.; Jonkman, J.; Driscoll, F. Investigation of a FAST-OrcaFlex Coupling Module for Integrating Turbine and Mooring Dynamics of Offshore Floating Wind Turbines: Preprint. In Proceedings of the 2011 International Conference on Offshore Wind Energy and Ocean Energy, Beijing, China, 31 October–2 November 2011.
- Ross, A. Orcina Project 1405 Wind Turbine Validation Report; Technical Report; Orcina Ltd.: Ulverston, UK, 2018.
- Azcona, J.; Munduate, X.; González, L.; Nygaard, T.A. Experimental validation of a dynamic mooring lines code with tension and motion measurements of a submerged chain. Ocean Eng. 2017, 129, 415–427.
- Azcona, J.; Palacio, D.; Munduate, X.; González, L.; Nygaard, T.A. Impact of mooring lines dynamics on the fatigue and ultimate loads of three offshore floating wind turbines computed with IEC 61400-3 guideline. Wind Energy 2017, 20, 797–813.
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; Technical Report; University of Colorado at Boulder: Boulder, CO, USA, 2007.
- Nygaard, T.A.; De Vaal, J.; Pierella, F.; Oggiano, L.; Stenbro, R. Development, Verification and Validation of 3DFloat; Aero-servo-hydro-elastic Computations of Offshore Structures. Energy Procedia 2016, 94, 425–433.
- Armendariz, A.J.; Munduate, X.; Nygaard, T.A.; Hoyos, M.D. Development of OPASS Code for Dynamic Simulation Mooring Lines in Contact with Seabed. In Proceedings of the EWEA Offshore 2011 Conference Proceedings, Amsterdam, The Netherlands, 29 November–1 December 2011; pp. 1–9.
- Hassan, G. Bladed Theory Manual Version 4.0; Technical Report; DNV Services UK Limited: Bristol, UK, 2010.
- Craig, R., Jr. Coupling of substructures for dynamic analyses—An overview. In Proceedings of the 41st Structures, Structural Dynamics, and Materials Conference and Exhibit, Atlanta, GA, USA, 3–6 April 2000.
- Beardsell, A.; Collier, W.; Han, T. Effect of linear and non-linear blade modelling techniques on simulated fatigue and extreme loads using Bladed. J. Phys. Conf. Ser. 2016, 753, 042002.
- Collier, W.; Milian Sanz, J. Comparison of linear and non-linear blade model predictions in Bladed to measurement data from GE 6MW wind turbine. J. Phys. Conf. Ser. 2016, 753, 082004.
- Larsen, T.J.; Hansen, A.M. How 2 HAWC2, the User’s Manual; Technical Report; Risø National Laboratory, Technical University of Denmark: Roskilde, Denmark, 2007.
- Robertson, A.N.; Gueydon, S.; Bachynski, E.; Wang, L.; Jonkman, J.; Alarcón, D.; Amet, E.; Beardsell, A.; Bonnet, P.; Boudet, B.; et al. OC6 Phase I: Investigating the underprediction of low-frequency hydrodynamic loads and responses of a floating wind turbine. J. Phys. Conf. Ser. 2020, 1618, 032033.
- Bellew, S.; Yde, A.; Verelst, D.R. Application of the Aero-Hydro-Elastic Model, HAWC2-WAMIT, to Offshore Data from Floating Power Plants Hybrid Wind- and Wave-Energy Test Platform, P37. In Proceedings of the 5th International Conference on Ocean Energy (ICOE), Halifax, NS, Canada, 4–6 November 2014.
- Pavese, C.; Wang, Q.; Kim, T.; Jonkman, J.; Sprague, M.A. HAWC2 and BeamDyn: Comparison Between Beam Structural Models for Aero-Servo-Elastic Frameworks. In Proceedings of the European Wind Energy Association Annual Conference and Exhibition 2015 (EWEA 2015), Paris, France, 17–20 November 2015.
- Gueydon, S.; Lindenburg, K.; Savenije, F. Coupling of Two Tools for the Simulation of Floating Wind Turbines. In Proceedings of the Volume 8: Ocean Renewable Energy, Melbourne, Australia, 11–16 June 2013.
- Naciri, M.; Waals, O.; de Wilde, J. Time Domain Simulations of Side-by-Side Moored Vessels: Lessons Learnt From a Benchmark Test. In Volume 1: Offshore Technology; Special Symposium on Ocean Measurements and Their Influence on Design; ASMEDC: Stamford, CT, USA, 2007; pp. 801–811.
- de Wilde, J.; van Dijk, A.; van den Berg, J.; Dekker, J. Direct Time Domain Downtime Assessment For LNG Operations Using Computer Cluster. In Proceedings of the Nineteenth International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 July 2009.
- Serraris, J.J. Time Domain Analysis for DP Simulations. Int. Conf. Offshore Mech. Arct. Eng. 2009, 43413, 595–605.
- Gueydon, S.; Weller, S. Study of a Floating Foundation for Wind Turbines. J. Offshore Mech. Arct. Eng. 2013, 135, 031903.
- Lindenburg, C. Comparison of Phatas Versions and the Wind turbine Module; Technical Report; ECN: Petten, The Netherlands, 2011.
- Lindenburg, C. PHATAS Release NOV-2003 and APR-2005 User’s Manual: Program for Horizontal Axis Wind Turbine Analysis and Simulation; Technical Report; ECN: Petten, The Netherlands, 2005.
- Liu, Y.; Li, S.; Yi, Q.; Chen, D. Developments in semi-submersible floating foundations supporting wind turbines: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 60, 433–449.
- Myhr, A.; Nygaard, T.A. Comparison of Experimental Results and Computations for Tension-Leg-Buoy Offshore Wind Turbines. J. Ocean Wind Energy 2015, 2, 12–20.
- Azcona, J.; Bouchotrouch, F.; González, M.; Garciandía, J.; Munduate, X.; Kelberlau, F.; Nygaard, T.A. Aerodynamic Thrust Modelling in Wave Tank Tests of Offshore Floating Wind Turbines Using a Ducted Fan. J. Phys. Conf. Ser. 2014, 524, 012089.
- Pai, P. Highly Flexible Structures: Modeling, Computation, and Experimentation; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2007.
- Chaplin, J.R. Developments of stream-function wave theory. Coast. Eng. 1979, 3, 179–205.
- Lee, C.H. WAMIT Theory Manual; Technical Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 1995.
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015.
- Det Norske Veritaswadam. SESAM User Manual Developed and Marketed; Technical Report; DNV: Bærum, Norway, 2010.
- Le Cunff, C.; Heurtier, J.M.; Piriou, L.; Berhault, C.; Perdrizet, T.; Teixeira, D.; Ferrer, G.; Gilloteaux, J.C. Fully Coupled Floating Wind Turbine Simulator Based on Nonlinear Finite Element Method: Part I—Methodology. In Proceedings of the Volume 8: Ocean Renewable Energy, Melbourne, Australia, 11–16 June 2013.
- Perdrizet, T.; Gilloteaux, J.C.; Teixeira, D.; Ferrer, G.; Piriou, L.; Cadiou, D.; Heurtier, J.M.; Le Cunff, C. Fully Coupled Floating Wind Turbine Simulator Based on Nonlinear Finite Element Method: Part II—Validation Results. In Proceedings of the Volume 8: Ocean Renewable Energy, Melbourne, Australia, 11–16 June 2013.
- Leroy, J.M.; Poirette, Y.; Brusselle Dupend, N.; Caleyron, F. Assessing Mechanical Stresses in Dynamic Power Cables for Floating Offshore Wind Farms. In Volume 10: Ocean Renewable Energy; American Society of Mechanical Engineers: New York, NY, USA, 2017.
- Ledru, R.; Le Cunff, C.; Heurtier, J.M.; Perdrizet, T.; Poirette, Y. Influence of Hydrodynamic Modeling Assumptions on Floating Wind Turbine Behaviour. In Volume 9B: Ocean Renewable Energy; American Society of Mechanical Engineers: New York, NY, USA, 2014.
- Evren, S.; Unel, M.; Adak, O.K.; Erbatur, K.; Aksit, M.F. Modeling and simulation of a horizontal axis Wind Turbine using S4WT. In Proceedings of the 2012 International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Japan, 11–14 November 2012; pp. 1–6.
- Prasad, C.; Chen, Q.Z.; Bruls, O.; D’Ambrosio, F.; Dimitriadis, G. Advanced aeroservoelastic modeling for horizontal axis wind turbines. In Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014, Porto, Portugal, 30 June–2 July 2014; pp. 3097–3104.
- Gözcü, M.O.; Kayran, A. Investigation of the effect of bending twisting coupling on the loads in wind turbines with superelement blade definition. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2014; Volume 524, p. 12040.
- Heege, A.; Gaull, A.; Horcas, S.G.; Bonnet, P.; Defourny, M. Experiences in controller adaptations of floating wind turbines through advanced numerical simulation. In Proceedings of the AWEA WINDPOWER 2013 Conference and Exhibition, Chicago, IL, USA, 21–22 October 2013; pp. 5–8.
- Digital Solutions at DNV. Sesam Feature Description; Technical Report; DNV: Bærum, Norway, 2022.
- Alblas, L. Fixed Offshore Wind Structure Design, What Sesam Can Do for Fixed Offshore Wind Turbine Structure Design and Analysis; Technical Report; DNV GL—Digital Solutions: Bærum, Norway, 2018.
- Barrera, C.; Guanche, R.; Rodríguez, Á.; Armesto, J.A.; Losada, I.J. On the importance of mooring system parametrisation for accurate floating structure designs. Mar. Struct. 2020, 72, 102765.
- Suzuki, H.; Shibata, H.; Fujioka, H.; Hirabayashi, S.; Ishii, K.; Kikuchi, H. Development of an Analysis Code of Rotor-Floater Coupled Response of a Floating Offshore Wind Turbine. In Proceedings of the Volume 8: Ocean Renewable Energy, Melbourne, Australia, 11–16 June 2013.
- Ishii, K.; Suzuki, H.; Hirabayashi, S. 2015S-OS1-7 Improvement of Accuracy of Wave Drift Force of a Floating Offshore Wind Turbine. In Conference Proceedings The Japan Society of Naval Architects and Ocean Engineers 20; The Japan Society of Naval Architects and Ocean Engineers: Tokyo, Japan, 2015; pp. 25–28.
- Shiohara, H.; Gonçalves, R.T.; Houtani, H.; Suzuki, H.; Schnepf, A.; Hirabayashi, S.; Carmo, L.H.S.; Nihei, Y. Numerical and experimental comparison of the wave response of a very light floating offshore wind turbine with guy wires. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84317, p. V001T01A055.
- Suzuki, H.; Xiong, J.; do Carmo, L.H.S.; Vieira, D.P.; de Mello, P.C.; Malta, E.B.; Simos, A.N.; Hirabayashi, S.; Gonçalves, R.T. Elastic response of a light-weight floating support structure of FOWT with guywire supported tower. J. Mar. Sci. Technol. 2019, 24, 1015–1028.
- Hooft, J.P. Hydrodynamic Aspects of Semi-Submersible Platforms. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1972.
- Faraggiana, E.; Giorgi, G.; Sirigu, M.; Ghigo, A.; Bracco, G.; Mattiazzo, G. A review of numerical modelling and optimisation of the floating support structure for offshore wind turbines. J. Ocean Eng. Mar. Energy 2022, 8, 433–456.



