The emerging industry of offshore wind turbines mounted on floating bases has garnered significant attention from both academia and industry. The desire to understand the complex physics of these floating structures has led to the development of numerical and physical modelling techniques. While physical testing has traditionally been employed, there is a growing focus on cost-effective and accurate high-fidelity numerical modelling as a potential alternative or supplement. However, commonly used numerical engineering tools in the offshore industry are considered mid- to low-fidelity and may lack the desired precision for floating offshore wind turbines (FOWTs). Given the complexity of these simulation codes, it is crucial to validate their accuracy.
- floating offshore wind turbine
- numerical modelling
- physical testing
- scale models
1. Introduction
2. Structural Codes
In the analysis of structural modules, a variety of approaches have been employed, including modal-based, finite element codes, and multibody methods. Some simulations have utilized combinations of these techniques to enhance accuracy. For instance, HAWC2 adopted a comprehensive approach, employing both multibody and linear finite element representations to model the turbine. On the other hand, ADCoS-Offshore opted for a nonlinear finite element system to capture intricate interactions. Codes like FAST, Bladed, and FLEX5 adopted a blend of modal and multibody techniques, incorporating modal elements derived from a finite-element-based preprocessor [10]. It is worth noting that modal-based codes yield slightly different second and higher coupled eigenmodes compared to their higher-fidelity multibody and finite element counterparts which indicates a stiffer behavior of a structure. As a result, variations in dynamic response and energy content are anticipated, particularly in the higher-frequency range. Multibody and FEM codes accommodate more DOF and thus allow for more vibrational modes and higher local vibrational modes. This results in reduced stiffness of the structure, which should better mimic reality. Mode-shape-based tools might not accurately predict these vibrations due to the limited number of mode shapes used for the model. The modal-based codes are categorized into two groups based on their formulation: Euler–Bernoulli and Timoshenko. The former is utilized by Bladed, FLEX5-Poseidon, ADCoS-Offshore, WaveLoads-ANSYS, HAWC2-BE, and ANSYS Beam, while the latter is employed by HAWC2, ANSYS Pipe, and Bladed (Timoshenko) [10][11][10,11]. When it comes to predicting natural frequencies of flexible body modes, not all codes exhibit the same level of accuracy. Codes that account for tower and blade bending, along with drivetrain torsion modes, tend to yield similar results with only minor discrepancies. Notably, codes neglecting tower torsion, like FAST, project higher natural frequencies, reflecting the stiffer compliance about the tower centerline.3. Aerodynamic Codes
In the realm of aerodynamic modelling, a blade-element-momentum-theory-based model was predominantly employed across simulation tools, albeit with variations in corrections and attributes. Some tools went further to encompass a dynamic wake element, which accounts for the time lag in induced velocities created by vorticity shed from the blades. In the domain of floating offshore wind turbine system modelling, various fidelity approaches were adopted, categorized under blade element momentum (BEM) theory, dynamic BEM (DBEM) incorporating dynamic inflow effects, generalized dynamic wake (GDW), free-vortex wake (FVW), and blade-resolved or actuator-line-based computational fluid dynamics (CFD). Several of these approaches, including BEM, DBEM, GDW, select FVW, and actuator-line-based CFD, are rooted in the lifting-line theory. The conventional BEM theory operates on the premise of an instantaneous wake reaction, where induced velocities based on axial and tangential induction factors are quasi-steady. In reality, however, there exists a delay for the wake to respond to shifts in flow conditions arising from changes in wind patterns or turbine responses. To address this, the dynamic inflow model (or dynamic wake) in BEM theory incorporates low-pass filters to rectify the unsteady aerodynamic response from this delayed wake reaction. On the other hand, GDW explicitly calculates dynamic inflow by representing induced velocity through series expansion and accounting for apparent mass. Most BEM and DBEM models accommodate prevalent aerodynamic corrections, critical in wind turbine design, such as blade-root and blade-tip losses. Tools utilizing FVW or CFD gain valuable insights into wind turbine wake behavior. However, it is important to note that most numerical models exhibit a slight overprediction of wake expansion, potentially influenced by the proximity of the blade tip to the experimental ceiling. While the motion of the turbine itself does not mandate an unsteady aerodynamic modelling approach for accurate load prediction, a realistic scenario involving generator torque control and blade pitch angle control would necessitate unsteady aerodynamic models—encompassing airfoil unsteady aerodynamics and dynamic inflow models—for precise load projections [16][17].4. Hydrodynamic Codes
Hydrodynamic loads on a floating structure encompass the influence of incident waves, the generation of outgoing waves due to platform movement (incorporating added mass and damping effects), and the effects of viscous forces. Typically, modelling these loads relies on two main techniques: potential flow (PF) theory and Morison’s equation (ME). The choice between these theories is contingent on the scale of the structure being simulated and the prevailing water flow conditions. The hydrodynamic approaches used in the simulation tools are based on one of these methods, or a blend of both. For large structures in the water, where their size is significantly greater than the wavelength, the water remains attached as it flows past the structure, making potential flow theory applicable. The most common technique for modelling potential loads is through panel methods. This approach encompasses capturing excitation from waves (including diffraction) and radiation effects (including added mass and damping effects). However, it does not encompass viscous drag resulting from flow separation.5. Mooring Codes
The numerical techniques for analyzing mooring systems can be broadly categorized into three methods: static, quasi-static, and dynamic [17][18]. The static method exclusively considers constant loads like gravity, buoyancy, steady currents, wind, and mean wave-drift forces. The quasi-static method is introduced due to the absence of an absolute static state. It assumes that within a given time step, the motion of a system motion is uniform and linear between two static positions, and the system loads remain constant. Typically employed during preliminary design, the quasi-static method assumes that the mooring line is in static equilibrium at each time step, with the body’s position dependent solely on the static restoring force. For greater accuracy in mooring loads, especially during large displacements where inertial effects are more pronounced, dynamic mooring models are utilized. Dynamic models fall into three main types: lumped-mass model, finite element method (FEM), and finite difference (FD) models [17][18][18,20]. In dynamic mooring models, the mooring line is discretized into small elements, accounting for hydrodynamic drag and added mass [19][21]. The lumped-mass model is a simpler numerical approach, assuming the mooring line consists of concentrated masses connected by massless springs. Mooring dynamics are derived by solving a system of equations of motion for each individual mass. FEM and FD provide high-fidelity solutions, treating the mooring line as infinitesimally small differential elements. The key distinction lies in the formulation of the governing equation, which is in a differential and integral form for FEM and FD, respectively [17][18].6. Numerical Simulation Tools
6.1. FAST Computer-Aided Engineering Tool
FAST (Fatigue, Aerodynamics, Structures, and Turbulence) is the primary computer-aided engineering (CAE) tool applicable to wind turbines. It was developed by the National Renewable Energy Laboratory (NREL) with support from the United States Department of Energy. It simulates the coupled dynamic response of a variety of wind turbine configurations, including two- and three-bladed horizontal-axis rotors, pitch or stall regulation, rigid or teetering hubs, upwind or downwind rotors, and lattice or tubular towers [20][21][22][27,28,29]. FAST includes a number of modules that use mathematical models to simulate one or more turbine components, such as AeroDyn (aerodynamics), HydroDyn (hydrodynamics of platforms for offshore structures), ServoDyn (control and electrical systems), and BeamDyn or ElastoDyn (structural dynamics). The schematic of various modules available in FAST is depicted in Figure 2.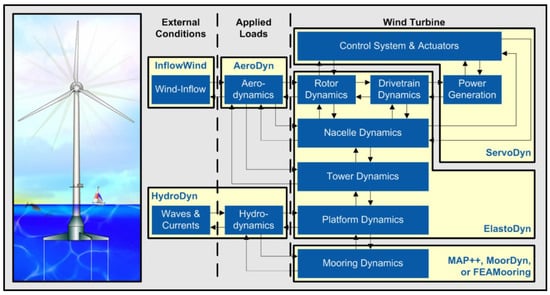
6.2. OrcaFlex
6.3. OPASS
Offshore Platform Anchorage System Simulator (OPASS), developed by the Spanish National Renewable Energy Center (CENER), is a tool for simulating nonlinear mooring dynamics using a lumped-mass model [28][29]. OPASS is built using the finite element method, with three translational DOF at each node and element mass lumped at nodes. Each element is made up of a slender line with a constant circular section, with the effects of inertia, gravity, hydrodynamic added mass, hydrostatic, wave kinematics, hydrodynamic drag, structural damping, and axial elasticity all taken into account [28]. The code can be used as a standalone tool to simulate mooring lines, or it can be used with FAST to model mooring lines using a quasi-static technique [28][30].6.2. OrcaFlex
6.3. OPASS
Offshore Platform Anchorage System Simulator (OPASS), developed by the Spanish National Renewable Energy Center (CENER), is a tool for simulating nonlinear mooring dynamics using a lumped-mass model [69,70]. OPASS is built using the finite element method, with three translational DOF at each node and element mass lumped at nodes. Each element is made up of a slender line with a constant circular section, with the effects of inertia, gravity, hydrodynamic added mass, hydrostatic, wave kinematics, hydrodynamic drag, structural damping, and axial elasticity all taken into account [69]. The code can be used as a standalone tool to simulate mooring lines, or it can be used with FAST to model mooring lines using a quasi-static technique [69,71]. The collaboration between CENER and Norway’s Institute for Energy Technology (IFE) has resulted in various scaled experiments for experimental validation and verification of OPASS. OPASS was initially validated using 3DFloat code computations [31][72], a dynamic mooring line module based on a finite element formulation [28][32][69,73]. Following that, OPASS was combined with FAST V6.02, and the final tool was satisfactorily confirmed as an aerohydroservoelastic simulation code under IEA task 30’s OC4 project [5][28][5,69]. Furthermore, OPASS was experimentally confirmed in a tank test at the Ecole Centrale de Nantes (ECN) against a submerged chain. OPASS was recently verified against test data from a submerged chain in which the suspension point was excited with horizontal harmonic motions of various periods in the plane of the catenary [28][29][69,70].6.4. Bladed
Bladed is an integrated aerohydroservoelastic modelling package developed by Det Norske Veritas (Norway) and Germanischer Lloyd (Germany) (DNV GL) which is capable of modelling both onshore and offshore wind turbines. Bottom-fixed offshore structures, such as jackets, can be designed in Bladed with beam components and flexible joints, or imported from third-party offshore design tools like SESAM and SACS [33][76]. Bladed can also simulate FOWTs using a mooring line system. Bladed models the dynamics of the mooring line as a multibody system in which bar components are linked together with universal joints to form a chain [33][76]. Bladed uses a flexible multibody dynamics technique in its structural dynamics code. Various flexible and rigid bodies can be linked together to model the entire system in this method. The Craig–Bampton approach is used to calculate the mode shapes and frequencies for each flexible body as a linear finite element body [33][34][35][36][76,77,78,79]. Each blade splits into several flexible bodies to form a geometrically nonlinear model capable of large deflections, whereas the tower is modelled using modal analysis [33][35][36][76,78,79]. This approach is a key feature of Bladed that allows stability analysis and determining the dynamic response of large modern wind turbine blades. Bladed’s multibody dynamics framework is also used to describe other physical components of wind turbines, such as pitch drives and generators [33][76]. The Morison equation provides the basis for Bladed’s hydrodynamic module. Since the Morison equation cannot be applied adequately for structures with large members, wave diffraction and radiation terms can be important, and the boundary element approach can be utilized to calculate hydrodynamic loads [5].6.5. HAWC2
The coupled aeroelastic Horizontal Axis Wind Turbine Simulation Code 2nd Generation (HAWC2) was created at Risoe National Laboratory in Denmark between 2003 and 2006 as part of an aeroelastic design research program [37][80]. The code has been tested both internally against the previous version, HAWC, and empirically against other offshore simulation codes used in OC research projects under IEA Annex 23 and Annex 30 [5][9][10][11][12][13][14][15][37][38][5,9,10,11,12,13,14,15,16,80]. The HAWCStab2 is another software tool created by Technical University of Denmark (DTU) Wind Energy for computing and analyzing the modal parameters of a wind turbine in both closed- and open-loop operations with or without unsteady aerodynamic loads [39][81]. HAWC2 is a time-domain tool for analysis of wind turbine dynamic response. Each body is an assembly of Timoshenko beam elements, and the structural module is formulated using a multibody dynamics technique. Modelling and analysis of complicated structures with large deflections and rotations of the bodies are possible with this formulation method. HAWC2 simulates a wind turbine by connecting bodies with constraint equations, with a constraint being a fixed connection to a global point (e.g., tower bottom clamping), a fixed coupling of relative motions (e.g., fixed pitch or yaw), frictionless bearings, and bearings with user-controlled rotation angles [37][40][80,82]. The aerodynamic loads are estimated using the conventional BEM approach, which has been extended to account for dynamic stall, skew inflow, dynamic inflow, and shear effects on the induction factor, as well as the effects of modern wind turbine blade deflection. In addition, the new Dynamic Wake Meandering (DWM) model has been included in HAWC2 [39][81], which is capable of capturing the response of turbines running in the wake of upstream turbines.6.6. aNySIM
aNySIM is an in-house time-domain hydrodynamic code developed by the Netherlands’ Maritime Research Institute (MARIN) in 2006. The goal of aNySIM is to simulate the coupled behavior of floating structures, taking into consideration wave, current, and wind loadings, as well as floating body dynamics and mooring dynamics [41][83]. Offshore oil and gas facilities including one or more vessels in offloading operations, mooring simulations and multibody lifting operations, and dynamic positioning capability investigations are some of the traditional applications of aNySIM [42][43][44][84,85,86]. However, aNySIM has recently been utilized to simulate floating wind turbines [45][87].6.7. PHATAS
The Energy Research Centre of the Netherlands (ECN) developed the computer Program for Horizontal Axis Wind Turbine Analysis and Simulation (PHATAS) tool to determine loads on horizontal axis wind turbines and model their dynamic response in the time-domain. PHATAS is part of the wind turbine design package FOCUS which was developed by the Wind Turbine, Materials and Constructions (WMC) group at Technology Center Netherlands (TCN) [46][47][89,90].6.8. 3DFloat
3DFloat is a fully coupled algorithm created by the Wind Energy Department at IFE and is frequently used to simulate the dynamic response of floating wind turbines during the conceptual design stage [48][92]. IEA has evaluated 3DFloat against various codes as part of OC initiatives. It has also been used to model the OC3-Hywind floating wind turbine for the OC3 project [10], the bottom-fixed (with jacket type) wind turbine for the OC4 project [11], and the semisubmersible platform for the OC4 project [5]. It has also been tested in wave tanks for three different types of tension-leg buoys [49][93], a semisubmersible platform [50][94], and the OC5 project [13]. 3DFloat is based on a nonlinear co-rotational FEM framework that takes into account geometric nonlinearities and connects computational nodes with elements. Each element is modelled as a 12-DOF Euler–Bernoulli beam. In addition, each element has structural, aerodynamic, and hydrodynamic characteristics in relation to the principal axes of the section and the axial direction. The calculation is done in the time-domain using either implicit methods such as the generalized 𝛼 method and the Newmark scheme, or explicit methods such as the central difference scheme [51][95]. Wind, waves, gravity, and buoyancy are all applied as distributed external loads on the structure in 3DFloat. Regular wave kinematics can be defined using either Airy theory or stream functions up to order 12 [31][52][72,96]. The Morison equation is used to compute wave and current loads on the wet part of the structure and for slender beams [31][72]. Furthermore, a third-party module such as WAMIT [53][97], NEMOH [54][98], or WADAM [55][99] can be utilized to compute the frequency-dependent added mass and damping coefficient matrices for a given structural element. BEM theory is used to determine the aerodynamic loads and induced velocity over the rotors with modification for dynamic inflow and yaw errors. The turbulence model is imported from HAWC or TURBSIM turbulence files [31][72]. For wind speeds below the rated wind speed, the control system in 3DFloat is designed for a variable speed rotor with constant blade pitch angle. For wind speeds greater than the rated wind speed, proportional integral (PI) control of pitch angle is utilized to control the rotor’s speed and power. The control module of 3DFloat includes a Dynamic Link Library interface [31][72].6.9. DeepLines Wind
DeepLines Wind is a comprehensive software developed jointly by Principia and IFP Energies Nouvelles [56][100] for the dynamic response of fixed-bottom and FOWTs subjected to ultimate and fatigue offshore environmental loadings. Constant winds, unsteady wind gusts, conventional wind spectra, and full-field turbulent wind are all represented as environmental loads in DeepLines Wind using Airy and nonlinear wave theories; user-defined or random wave spectra like JONSWAP; and steady and unsteady current profiles [56][57][58][100,101,102]. The structural dynamics of the blades are characterized using 3D beam dynamic finite elements that account for the structural twist, variable stiffness, structural damping along the blade, as well as in-plane and out-of-plane pre-bends [56][57][58][100,101,102]. The rotor’s aerodynamic loads are computed using BEM theory, which includes improvements for dynamic stall and tower shadow effects [56][57][58][100,101,102]. The hydrodynamic loads are calculated using drag and inertia Morison elements, diffraction and radiation loads, first-order wave loads (based on potential flow), and second-order wave loads (based on Newman or Quadratic Transfer Function (QTF)). Nonlinear hydrostatic loads can alternatively be represented by pressure integrals across the hull surface or by bar elements [56][57][58][59][100,101,102,103]. The mooring system for floating wind turbines can be modelled either as a solid subjected to hydrodynamic loads using potential flow theory or as deformable assembled elements subjected to hydrodynamic loads using Morison equations [56][57][58][100,101,102].6.10. SAMCEF
CAESAM, SAMCEF Field, and SAMCEF Mecano [60][61][62][104,105,106] are among the SAMTECH general tools used by S4WT. CAESAM is a general framework for integrating models and computational tools to perform transient, modal, and fatigue analysis of wind turbines. SAMCEF is a graphical preprocessor tool that helps S4WT build wind turbine components. Finally, SAMCEF Mecano is SAMCEF’s implicit nonlinear finite element solver [60][61][104,105], which contains multibody simulation elements. In S4WT, the structural formulation is based on geometrically exact nonlinear beam theory, and the blades are modelled using a nonlinear FEM approach that is suitable for nonlinear modelling and composite blades subjected to large deformation. Furthermore, the blade model can be expressed as super elements or nonlinear beam elements [61][62][105,106]. The aerodynamic loads are computed using BEM theory with various corrections and additional models to account for tip and hub losses, the tower shadow effect, dynamic inflow, and dynamic stall. S4WT may import wind loads from external software such as Bladed or Flex 5, or build them using its built-in models [62][63][106,107]. To account for structural and hydrodynamic coupling effects, the hydrodynamic formulation is implemented in SAMCEF Mecano and uses the Morison equation [63][107].6.11. Sesam
Sesam has been in use since 1969 for hydrodynamic and structural analysis of offshore structures. The key tools in Sesam, including GeniE, Sima, HydroD, and DeepC, are utilized for modelling and simulation programs as entry points for various sectors [64][65][66][108,109,110]. The preprocessor, hydrodynamic analysis programs, structural analysis programs, and postprocessors are the four programs that make up Sesam [64][108]. An overview of Sesam is presented in Figure 3.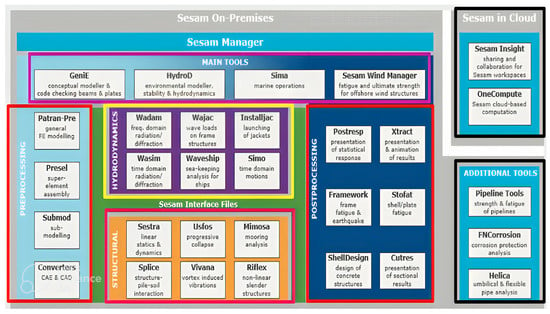
6.12. UTWind
7. Summary
The investigation into FOWTs necessitates a comprehensive exploration of aerodynamic, structural, hydrodynamic, and mooring aspects. This intricate analysis aims to unravel the interconnected dynamics of aerodynamic forces, structural responses, hydrodynamic behaviors, and mooring system intricacies. As FOWTs stand at the forefront of renewable energy advancements, understanding the synergies and challenges within each domain becomes imperative. This multifaceted examination is pivotal for optimizing design, enhancing reliability, and maximizing the performance of FOWTs.
Aerodynamic loads are conventionally assessed using the BEM theory, a method combining momentum and blade element theories. Despite its efficiency in computation, BEM theory relies on assumptions such as rotor discretization as annuli, neglecting of root and tip losses, and consideration of steady flow. To enhance accuracy, correction models are introduced, addressing issues like hub and root losses. The BEM theory, while widely employed, requires further investigation, especially for FOWTs facing complex inflow wind conditions due to platform motions.