1. Wireless Localization Technology
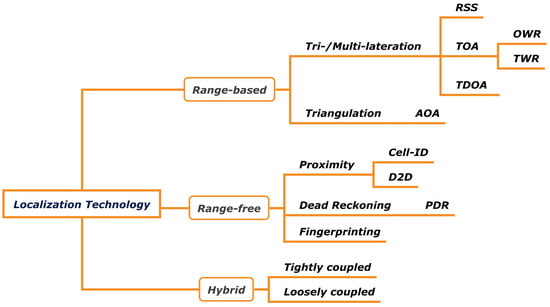
Wireless communication technologies are diversely being utilized for localization. In fact, communication signals have various physical factors such as power, delay, and phase, which are used for wireless localization. The algorithms for estimating the position can be divided into three categories: range-based techniques, which are based on physical factors of radio waves, range-free techniques, which use known information (such as pre-processed data) rather than physical factors, and hybrid techniques, which utilize the two techniques appropriately to complement each other. These three categories are summarized as shown in Figure 1.
Figure 1. Overview of standard localization technology.
1.1. Range-Based Techniques
Range-based techniques involve estimating a device’s location by considering physical factors (such as signal strength, time, and angle) of transmitted and received signals, along with geometric and linear algebraic methods like trilateration and triangulation between the device and anchor/AP/base stations (referred to as anchor).
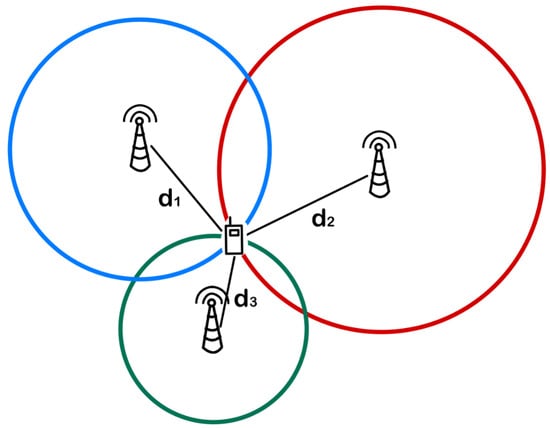
First, the distance information between the device and the anchor is obtained using the physical factors of the signal, and then the location of the device is estimated using trilateration or multilateration. In this case, trilateration or multilateration refers to calculating the device’s location as the intersection point of circles (or spheres) centered at each anchor, with each circle’s radius being the distance from the anchor to the device, using at least 𝑛+1�+1 anchors in n-dimensional space, as shown in Figure 2.
Figure 2. An illustration of the concept of trilateration.
The distance between a device and an anchor is measured by the change in the physical factors of radio waves during transmission and reception. Thus, by using signal strength and propagation time, received signal strength (RSS) and time of arrival (ToA) can be used to estimate the distance between the transceivers.
1.1.1. Received Signal Strength (RSS)
One of the simplest methods for distance measurement is the utilization of received signal strength (RSS). The distance between the device and the anchor through RSS can be obtained through the following equation.
d, 𝑑0, 𝑃𝑅, 𝑃0, and n are the distance between the device and the anchor, the reference distance, the actual RSS, the reference RSS, and the path loss exponent, respectively. Here, 𝑃0, 𝑑0, and n are fixed values, thus the distance d can be simply calculated by substituting 𝑃𝑅. Although this method is quite simple regarding hardware implementation, there is an issue of knowing the path loss exponent n in advance, and it is very vulnerable to the signal-to-noise ratio (SNR).
1.1.2. Time of Arrival (ToA)
ToA is the time it takes for a wireless signal to travel from the transmitter to the receiver. It can be used to estimate the distance between the device and the anchor by using the following equation.
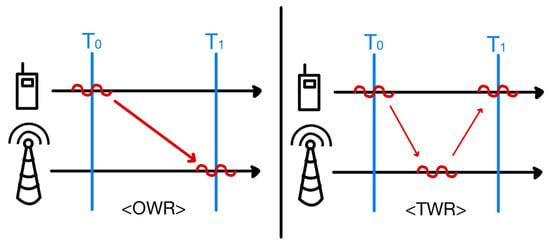
T represents the propagation delay time, d represents the distance between the device and the anchor, and c represents the speed of light. Two methods using the ToA technique, one-way ranging (OWR) and two-way ranging (TWR), are widely used, as shown in Figure 3.
Figure 3. An illustration of the concept of OWR and TWR.
In the case of OWR, ToA can be obtained through the duration of transmission and reception time. While OWR calculates the time on a single path, TWR calculates it using RTT, which means the time from the moment the transmitter transmits the wireless signal to the moment the receiver receives the signal and then retransmits it to reach the transmitter. Through this, ToA can be calculated by subtracting the receiver waiting time (such as network delay time within RTT) from RTT and dividing it by half. Comparing the two methods, OWR is relatively fast and consumes less power in distance measurement; however, TWR does not require precise synchronization for the localization network and has the advantage of lower initial configuration cost as it is robust against network synchronization.
In the case of the ToA technique, if the reference clocks of the anchor and the device are different, it is not possible to obtain the absolute time and the two reference clocks must be identical.
1.1.3. Time Difference of Arrival (TDoA)
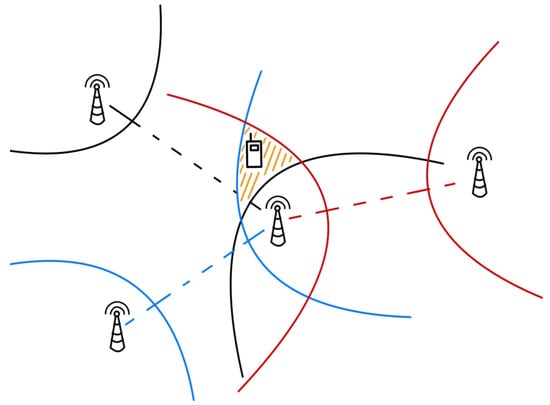
TDoA is the difference between the distances between a device and two anchors, divided by the speed of light, and estimates the location of the device by finding the intersection of the parabolic curves with the two anchors as the focus, as shown in Figure 4. This technology is used even when synchronization between the device and the network is not established, by simply obtaining the time difference from multiple anchors. On the other hand, recent research has aimed at translating the time difference of arrivals for two signals transmitted at different frequency bands simultaneously into the distance to the receiving device.
Figure 4. An illustration of the concept of TDoA.
1.1.4. Angle of Arrival (AoA)
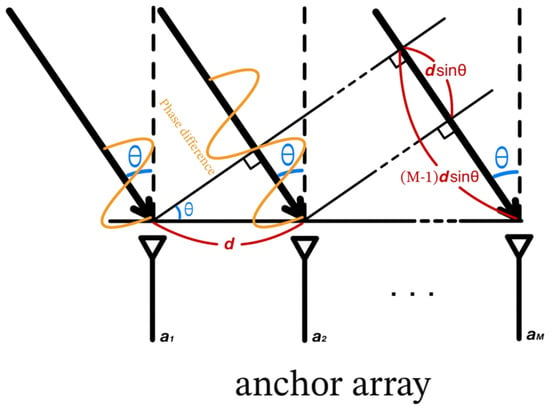
AoA refers to the direction of the signal coming from the device toward the anchor. By leveraging and measuring the delay difference of the arrival at individual antenna array elements, AoA-based methods use the anchor’s antenna arrays to determine the angle at which the transmitted signal arrives at the anchor as shown in Figure 5. The received signal angles from two or more anchors are measured and the position of the device is estimated using trigonometry.
Figure 5. An illustration of the concept of AoA.
2. Range-Free Techniques
Range-based technologies can have limitations in terms of accuracy as wireless signals are influenced by various factors such as distance, spatial structure, humans, objects, temperature, humidity, etc. In contrast, range-free technologies estimate the location of a device by using pre-existing information, rather than relying solely on the physical factors of the wireless signal.
2.1. Proximity
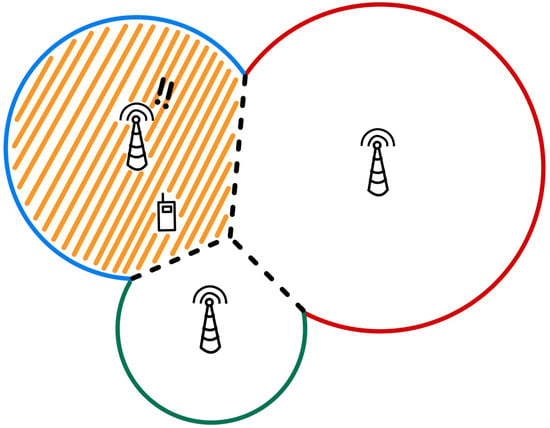
A representative proximity-based technology is Cell-ID technology. Cell-ID is a technology that uses the unique number assigned to each base station in wireless communication. The localization technology based on Cell-ID determines the position of the device based on the location of the base station it is connected to as shown in Figure 6. It is simple to determine the location through information processing, while the disadvantage is that the entire communication range of the base station is the error range, making it difficult to achieve precise localization.
Figure 6. An illustration of the concept of Cell-ID.
Another proximity-based technology is device-to-device (D2D) communication. D2D communication means direct communication between devices without passing through the anchor. This communication method can expand the active area by continuously connecting devices through a relay method. This method can also be applied to localization, where the location of the next device can be measured based on the device that has determined its location, without direct communication with the anchor. This reduces the load on the anchor that communicates with multiple devices; however, the error can increase if the connection between devices becomes overlapping.
2.2. Dead Reckoning
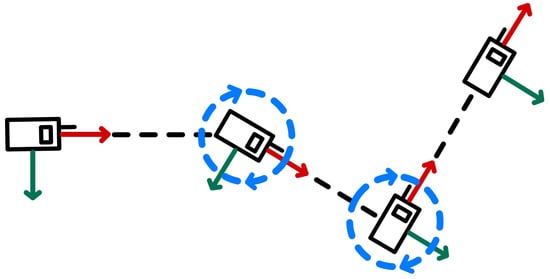
Dead reckoning (DR) is a localization technique that estimates a device’s current position based on the distance and direction it has traveled over a certain period of time. This technique uses inertial navigation systems to measure the movement of a device and continuously updates its position in real time. It involves both movements relative to fixed axes indicated by red and green arrows, as shown in Figure 7, with reference to the device, as well as rotations represented by the blue arrow.
Figure 7. An illustration of the concept of DR.
DR provides stable and continuous position tracking; however, it accumulates errors over time. Moreover, there is also a technology called pedestrian dead reckoning (PDR), which incorporates the estimation of a pedestrian’s direction and stride length into dead reckoning by detecting steps.
2.3. Fingerprinting
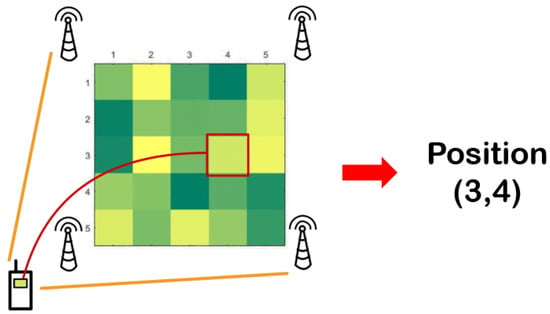
Fingerprinting technology is a technique that determines a device’s location based on the strength of the received signal and the reference location in a radio map with the most similar signal strength as shown in Figure 8. There is a pre-condition that a radio map must be pre-made. During actual localization, only the process of comparing the received signal and the radio map is performed, thus the location can be estimated relatively quickly. The radio map is a kind of set of on-grid values created in advance by measuring the strength of the signal received from the anchor at several reference locations with known positions. The advantage of this technology, if utilized based on Wi-Fi, is that localization is possible without additional infrastructure or equipment, using only existing commercial devices.
Figure 8. An illustration of the concept of fingerprinting.
3. Comparison
Wireless localization technologies can be classified into range-based technologies and range-free technologies, depending on whether or not they use physical factors of communication signals. Table 1 summarizes the advantages and disadvantages of these two technologies.
The range-based technology estimates the location in real-time by measuring physical factors, does not require prior work, and is accurate but has the characteristic of being resource-intensive and the geometric calculation process is complex. On the other hand, the range-free technology does not measure the physical factor of the signal but requires prior work and has the advantage of being a resource-efficient and simple comparison process.
In more detail, the advantages and disadvantages of range-based technologies can be compared as shown in Table 2. RSS-based technology requires simple hardware implementation, leading to low costs, but it also comes with lower accuracy. Its accuracy is compromised by factors such as multipath and reflection. ToA and TDoA technologies have lower attenuation and cost, but they are influenced by hardware resolution and LoS environments. AOA technology offers high accuracy but comes with a higher cost by employing complex antenna arrays. Additionally, it is susceptible to environmental conditions such as multipath, scattering, and NLoS.
Similarly, range-free technologies can be compared as shown in Table 3. Proximity technology enables moderate accurate positioning with inexpensive implementation, leading to high energy efficiency. The accuracy and cost of DR technology depend on the measurement device, and estimating movement distance and direction in DR technology may result in some energy consumption. Fingerprinting technology’s accuracy relies heavily on the precision of the radio map. Although creating a precise radio map can incur high costs and may have relatively low energy efficiency, it provides exceptionally high accuracy.
4. Hybrid Techniques
While both technologies have distinct properties, there is a growing research effort to integrate the two groups. It aims to leverage their unique strengths and weaknesses to complement each other effectively. When combining various technologies, it is possible to categorize the approach into tightly coupled and loosely coupled based on the interdependencies between the technologies
[1]. The tightly coupled approach involves closely integrating various technologies and data sources to achieve a high level of synergy. In positioning technology, this means that each technology simultaneously utilizes the data of others, complementing each other to achieve high accuracy. For example, enhanced Cell-ID is a technology that improves accuracy by adding RTT and AoA information between the anchor and the device to the Cell-ID method. On the other hand, the loosely coupled approach indicates that components operate independently, integrating information only when necessary. In positioning technology, this means that each technology independently measures location data, which is selectively and appropriately corrected depending on the situation. For instance, there are technologies that combine fingerprinting and PDR
[2], which resolve the error of judging the reference location unrelated to the device’s position and the cumulative error of the inertial navigation device due to the flow of time, as the device’s position. Depending on the circumstances, a suitable combination between these two approaches can enhance positioning accuracy.
 +1 credit
+1 credit