Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Pho Van Nguyen | -- | 3494 | 2023-12-03 17:12:27 | | | |
| 2 | Jessie Wu | Meta information modification | 3494 | 2023-12-04 04:14:45 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Nguyen, P.V.; Dhyan, S.B.; Chow, W.T. Human-Hand-like Grippers. Encyclopedia. Available online: https://encyclopedia.pub/entry/52286 (accessed on 12 June 2026).
Nguyen PV, Dhyan SB, Chow WT. Human-Hand-like Grippers. Encyclopedia. Available at: https://encyclopedia.pub/entry/52286. Accessed June 12, 2026.
Nguyen, Pho Van, Sunil Bohra Dhyan, Wai Tuck Chow. "Human-Hand-like Grippers" Encyclopedia, https://encyclopedia.pub/entry/52286 (accessed June 12, 2026).
Nguyen, P.V., Dhyan, S.B., & Chow, W.T. (2023, December 03). Human-Hand-like Grippers. In Encyclopedia. https://encyclopedia.pub/entry/52286
Nguyen, Pho Van, et al. "Human-Hand-like Grippers." Encyclopedia. Web. 03 December, 2023.
Copy Citation
Robotics has gained substantial popularity and holds the potential to facilitate a myriad of remarkable tasks. Manipulation, which plays a pivotal role in the realm of robotics, constitutes an emerging and intricate field. In contemporary times, several materials, actuators, and fabrication techniques have been employed to develop grippers.
robotic gripper
soft gripper
conventional gripper
bioinspired gripper
biomimetic gripper
hybrid gripper
1. Introduction
The human hand consists of a combination of rigid bone phalanges and flexible ligamentous joints that make it the most advanced manipulator among all animals. The hybrid nature of the human hand contributed to the strength as well as dexterity of human fingers [1], which enabled them to handle intricate objects and construct complex structures. Due to differences in the shapes, sizes, and surface properties of the objects to be grasped, each case requires a specific grasping configuration. Schlesinger [2] categorized hand-grasping postures into six functional types based on the shape characteristics of both the hand and the grasped objects. These categories included fingertip pinch, side pinch, clamp pinch, hook, spherical grab, and cylindrical grab. Building upon this, Napier [3] highlighted the influence of the surface characteristics, size, and shape of the target object on grasping movements, leading to a distinction between precision grip and power grip.
Traditional robotic grippers are constructed with rigid joints and links, making them a prevalent choice for industrial robotic applications. These grippers operate using conventional transmission systems like gear-link transmission or tendon-driven mechanisms. They excel in structural stiffness and load-bearing capabilities, delivering substantial force for meticulous control and operation. As outlined in [4], these traditional grippers encompass a spectrum ranging from robot grippers with two or three fingers to multi-finger and adaptive grippers, depending on the finger count and adaptability techniques.
While traditional grippers offer agility in manipulating objects, they pose challenges due to mechanical and control intricacies. Particularly, they struggle with handling soft, deformable objects [5]. Moreover, their high structural stiffness renders human interaction unsafe [6]. To surmount these drawbacks, researchers have turned to soft robotic technologies, prioritizing end-effector compliance and adaptability for various objects [7][8]. The biological realm underscores the value of softness and compliance in simplifying interactions with the environment [9]. Soft grippers predominantly utilize SMPs, SMAs, and low-melting-point alloys (LMPAs) responsive to temperature changes. Additionally, stimuli like pH, light, electricity, and magnetism have been explored for advancing soft-compliant gripper development.
Despite substantial advancements in manipulator gripping research, attaining an equivalent degree of robustness and adaptability to that found in the human hand remains a challenging endeavour [10]. Existing R-Hs vary from simple single-DOF parallel grippers to high-DOF anthropomorphic hands. Some R-Hs utilize one or a few actuators with limited DOF, while others integrate fully actuated, passive joints and multiple DOF [11][12][13][14][15][16][17].
2. Traditional Rigid-Link Grippers
In this section, researchers conduct a comprehensive examination of traditional rigid-link grippers, encompassing a spectrum from simple two-fingered configurations to complex anthropomorphic hands featuring articulated fingers and joints. These grippers are activated through either external or integrated motors, utilizing contact-driven direct actuation or tendon-driven actuated structures.
2.1. Two-Finger Grippers
Two-finger robot grippers, also known as parallel claw grippers, represent a prevalent category of industrial grippers due to their straightforward usability, manufacturability, and cost-effectiveness. These grippers find extensive application in pick-and-place operations, palletizing, assembly tasks, and other uncomplicated manipulations.
Researchers have dedicated significant efforts to advancing two-finger grippers in order to enhance object manipulation, taking inspiration from the way humans predominantly utilize two fingers—the index finger and thumb—for in-hand manipulation [18][19][20]. To extend the capabilities of two-finger robots, several authors, including those in [21][22][23], introduced additional DOF by implementing actuated moving surfaces on the fingertips. These solutions, however, generally confine gripper motion to a single plane and limit in-hand manipulation to rolling motions without the ability to twist.
Maxwell [24] pioneered a multi-DOF two-finger robot gripper designed to handle larger objects and execute in-hand rolling and twisting. Employing a tendon-driven mechanism to operate the linkages, this gripper also incorporates a folding mechanism, enabling it to function effectively in tight spaces. This particular gripper has proven valuable for conducting minimally invasive surgeries in humans.
Zhiguo [25] developed a two-finger dexterous bionic hand featuring three distinct grasping patterns: power grasping, precision pinch, and lateral pinch. This bionic hand boasts six DOF, with the thumb and index finger each composed of three rigid phalanx links and three rotational joints.
In another advancement, researchers in [26] introduced a versatile gripper that seamlessly blends two of the most prominent gripping technologies: two-finger and suction-cup grippers. This innovative design involves a retractable rod-mounted suction cup located within the R-H’s palm, carefully positioned to avoid interference from the two fingers. By utilizing a single actuator to drive both finger motion and the sliding rod, this gripper minimizes complexity while achieving versatile functionality.
2.2. Three-Finger Grippers
Three-finger grippers, as the name suggests, are composed of three fingers utilized for grasping objects. While these grippers are more intricate compared to their two-finger counterparts, they find application in scenarios demanding heightened precision and accuracy for handling delicate items.
The BarrettHand™ BH8-282 [27], developed by the University of Pennsylvania, is a notable example of a three-finger gripper. It features three articulated fingers and a palm, enabling object grasping. With a high degree of flexibility through its eight axes, this gripper, controlled by four brushless DC servomotors, can adapt in real time to securely encompass diverse objects. Each finger is independently controlled by servomotors, operating two joint axes. The Torque Switch™ facilitates torque transmission through joints, aiding in the grasping process. While the inner and outer fingers follow an anthropomorphic design, the opposing thumb’s motion replicates non-anthropomorphic primates’ spreading motion. Precise control over position, velocity, acceleration, and torque is achievable for each finger across 200,000 encoder positions. Additionally, integrating tactile and strain-gauge sensors enhances BarrettHand’s grasp intelligence.
In the realm of three-finger grippers, the success of grasping is reliant on the interaction between object and hand strategies. In the context of underactuated hands, Model S [28] introduced a novel approach. Consisting of three coupled prismatic joints and single-joint fingers, this 3D-printed ABS hand adapts passively to an object’s principal axis. By curling all three fingers around an object until they tangentially make contact with its curvature, this grasp maximizes contact and minimizes dropping risks [29]. Similarly, Schunk’s three-finger R-H uses a single common actuator to drive three prismatic joints. The works of Hanafusa and Asada [30] present a radially symmetric three-finger hand featuring rollers at the fingertip to reduce tangential friction during grasping. The MLab hand [31] incorporates elastic elements into its radially symmetric fingers, enhancing conformance to grasped objects. Vignesh [32] introduced an underactuated gripper with three fingers driven by linkage and six DOF, leveraging unconventional anthropomorphic designs and 3D-printed PLA plastic fabrication. Incorporating a spring mechanism for compliance, a single motor powered the fingers through a gear train mechanism, providing differential motion. This design process drew on online human grasp data for parameterization and validation through 3D-printed models.
2.3. Multi-Finger Grippers
Multi-finger and adaptive grippers bring the ability for robots to adeptly conform to objects of varying shapes and sizes, enhancing grip strength and overall reliability. One of the early instances of such a gripper was the UTAH/MIT Dexterous Hand [33], a robotic end-effector jointly developed by the University of Utah and the Massachusetts Institute of Technology. Created as a research tool for comprehending machine dexterity, the Dexterous Hand (DH) emulated anthropomorphic design principles, inspired by the versatile capabilities of the human hand in performing intricate manipulation tasks. With over twenty-five DOF, including its wrist, the DH prioritized speed and strength to interact with materials spanning from soft foams to rigid metals. To enable this, the actuation system was positioned external to the hand for enhanced flexibility, and flexible tensile tendons were employed to transmit energy from actuators to the hand. The configuration of thirty-two individual actuators controlled the tendons, which boasted a lifespan of six million cycles [34][35].
The Stanford-JPL hand [36] introduced a distinct approach by siting motors on the forearm, with flexible conduits housing Teflon-coated tension cables that looped around the wrist joints. This strategic arrangement reduced the impact of gravity and inertia from hand actuators on the entire system. In doing so, the design minimized the hand’s dimensions and improved its durability by eliminating the need for actuators within the fingers.
The realm of multi-fingered R-Hs also encompasses the JPL four-fingered hand [37] and the Anth R-H [38]. The latter, Anthrobot, stands out with its focus on achieving anatomical similarity to the human hand, encompassing not only the finger count but also aspects such as thumb positioning, movement, link lengths, and palm shape. While the hand consists of a total of 20 joints (four per finger and four for the thumb), it leverages 16 motors for control.
The robot hands previously mentioned are governed by remote actuation systems, utilizing flexible tendon cables. However, these cables introduce inaccuracies in joint angle control, and the intricate mechanical design can complicate maintenance. In response, researchers directed their efforts toward crafting robot hands featuring integrated actuation systems within the finger bodies and palms.
Examples of such internally actuated hands include the Belgrade/USC hand [39], the Omni hand [40], the NTU hand [41], and DLR’s hand [42]. A notable instance is the DLR/HIT Hand I, developed by Liu [43], comprising four fingers with a total of thirteen DOF. The subsequent iteration, DLR/HIT Hand II [44], a five-fingered hand with fifteen DOF, was designed to resemble the human hand more closely while integrating the actuation and communication systems within the fingers’ bases. Each finger is composed of a finger body housing super-flat BLDC motors and a finger base accommodating a bevel gear transmission, facilitating curling and extension motions. However, the last two joints of the fingers are mechanically coupled and controlled by steel wires, preventing the individual control of the middle and distal phalanges. The thumb, not utilized in the DLR/HIT Hand I, was fixed appropriately in the DLR/HIT Hand II design, allowing all five fingers to be conveniently positioned on the palm using spring probes [43].
Another noteworthy development is the Gifu Hand II [45], an anthropomorphic robot hand featuring a thumb and four fingers. The thumb comprises four joints with four DOF, while each finger boasts three DOF across four joints. Similar to the DLR/HIT Hand II, built-in servo motors are integrated into all finger joints for easy palm adaptor mounting. Notably, the Gifu Hand II employs a distributed tactile sensing system with 624 sensing points, coupled with a six-axis force sensor in each finger. This configuration enables compliant pinching and squeezing. The incorporation of high-stiffness gears, such as satellite gears, instead of tendon-driven harmonic drive gears contributes to a high-stiffness hand.
3. Soft Grippers
In this section, researchers undertake an extensive exploration of soft grippers, spanning from pliable two-fingered grippers to intricate, heavily compliant anthropomorphic hands with articulated fingers and joints [46][47][48]. These grippers exhibit various activation methods for grasping objects, including gripping by actuation, gripping by controlled stiffness, and gripping by controlled adhesion.
3.1. Soft Grippers with Gripping by Actuation
Grippers employing external actuation utilize servo-motors positioned outside the gripper body to drive the mechanism and achieve object conformation. In this category, numerous soft-compliant grippers have emerged, characterized by a grasping action accomplished through a singular actuator at the gripper’s base, facilitating the bending and buckling of the structure [49][50][51][52].
Petkovic devised a two-finger underactuated compliant gripper exhibiting concave and convex grasping shapes. Distributed compliance defined its operation, and the entire gripper was 3D-printed as a single unit, thus ensuring cost-effectiveness and adaptability to diverse objects [50]. In a similar vein, Bruno [51] integrated proprioceptive haptic feedback into a two-finger self-adaptive gripper. A novel sea-saw mechanism enabled object grasping without external vision systems. The gripper’s stiffness determined the point of contact with the object. Further advancing this field, Liu [52] conceived a two-finger adaptive compliant gripper (ACG) synthesized through a soft-add topology optimization algorithm. This involved a holistic size optimization approach, amalgamating the augmented Lagrange multiplier (ALM) method, simplex method, and nonlinear finite element analysis. In the research, three distinct silicon rubber prototypes were fabricated. The ACG tool showcased proficiency in manipulating items like clips, coins, batteries, forks, and USB drives.
Furthermore, researchers have also ventured into the development of tendon-driven underactuated grippers, drawing inspiration from the human hand’s mechanics. These grippers employ a single tendon to drive multiple DOF, mirroring the dexterity of the human hand. Generally, such grippers utilizing tendon-driven actuation are composed of rigid links and joints [17][53]. Here, researchers' focus is on compliant soft grippers driven by tendons. Raymond [54] spearheaded the Yale OpenHand Project, dedicated to creating commercially viable underactuated hands. The T42 model featured two autonomously driven, opposing underactuated fingers, constructed via 3D printing. This innovation enabled the gripper to handle objects ranging from delicate glass cups to staplers, showcasing its versatility. Ali [55] introduced a B-I-compliant 3D-printed soft gripper boasting sensorless compliance. This design proved adept at manipulating fragile items like strawberries and even intricately detailed 3D-printed artificial ears. Such advancements in tendon-driven underactuated soft grippers offer promising avenues for enhanced object manipulation across a wide spectrum of tasks and objects.
Manti [56] introduced a B-I three-finger soft-robotic gripper designed for adaptable and effective object grasping. This gripper employed a single actuator within an underactuated C-D mechanism. Similar to the human hand, each finger was comprised of three phalanges. The flexion and extension of these fingers were accomplished through cables that traversed a U-tube channel within each finger. These cables were anchored to spools and connected to the motor shaft at the gripper’s base. The gripper’s variable stiffness enhanced its ability to grasp various objects, including cylinders, spheres, plastic boxes, eggs, fresh tomatoes, and compact discs. Luke [57] proposed a caging-inspired gripper employing three hooked flexible fingers and a mobile palm configuration, forming a cage-like structure around the object while gripping. The flexible fingers, behaving like pre-loaded springs, offered both conformity to object shapes and increased friction for objects not suited for caging. This gripper demonstrated efficient grasping for cuboid and cylindrical objects, making it suitable for supermarket applications, particularly in handling fruits and vegetables.
Additionally, researchers in [58] presented a lightweight tendon-driven robotic gripper with three fingers and a telescopic palm, actuated pneumatically. These fingers exhibited swift pre-contact movements and could grasp and release objects—such as Starbucks cups, plastic bottles, and baseballs—at high speeds. Ahmed [59] developed a pneumatically actuated gripper incorporating rubber hose fingers with a nonuniform wall thickness. This design was tailored for handling small, lightweight, and delicate objects like electronic chips and light bulbs. Each finger was activated by controlled air pressure, enabling the precise gripping and manipulation of objects with the utmost care.
The SDM Hand [60] stands out as a robust four-fingered compliant gripper designed for unstructured environments. Fabricated using polymer-based shape deposition manufacturing, this hand integrates actuators and sensors into rigid polymers. The gripper operates using a single actuator to drive all four fingers, simplifying the mechanism and reducing its weight. Notably, each link’s concave side features a soft finger pad to optimize the friction and contact area, thereby enhancing the gripper’s ability to grasp [61][62]. The SDM Hand has exhibited its capabilities by manipulating objects such as a volleyball, wooden block, wine glass, wine bottle, and box of matches. Xu and Todorov [63] took a similar approach, developing an anthropomorphic hand capable of mimicking human hand behaviours and performing various tasks. Likewise, the PISA/IIT SoftHand [8] represents an innovative robot hand with 19 joints, leveraging a single actuator to activate adaptive soft synergies. The key innovation of this hand lay in its use of inventive articulation and elastic ligaments, replacing the conventional rigid links and joints typically found in R-Hs. This design choice significantly enhanced the hand’s dexterity and adaptability.
3.2. Soft Grippers with Gripping by Controlled Stiffness
Soft grippers that utilize shape-memory alloys or polymers react to thermal stimuli, causing them to change their shape and conform to objects of varying sizes and shapes [64][65]. Lan [66] introduced a self-sensing two-finger microgripper made of an SMA, capable of handling objects like strings, screws, and even a fly. Each finger incorporated resistance for the self-sensing of the finger’s position.
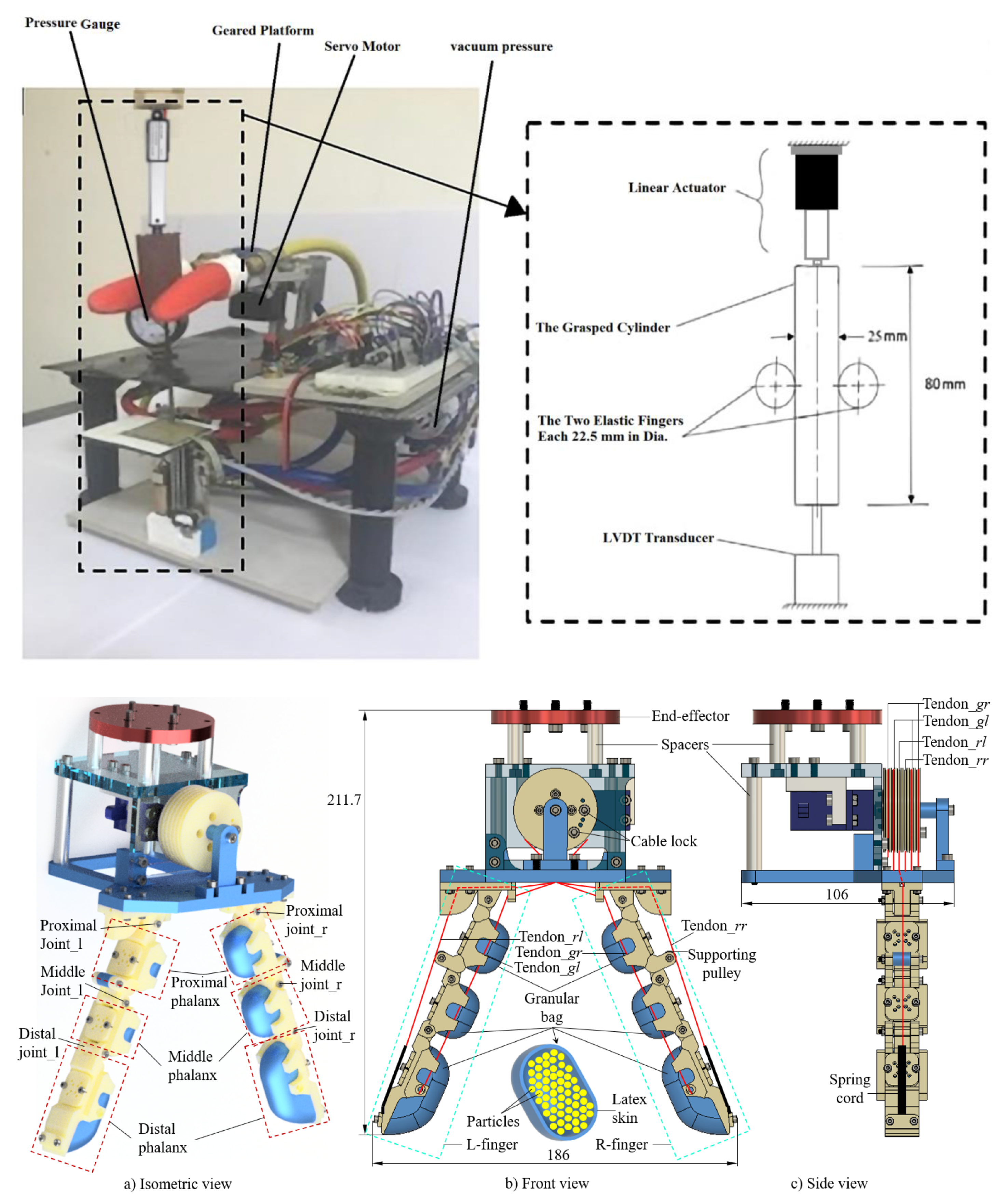
Control-stiffness-based grippers operate on a principle distinct from that of the actuation-based grippers mentioned earlier. These grippers initially reconfigure their structural composition to become soft and then envelop the object to be grasped without causing harm. Researchers have explored several variable-stiffness technologies, including granular jamming, low-melting-point alloys, and shape-memory materials [56][67]. Granular jamming grippers function by manipulating loose particles within a bag, depressurizing them to create a solid object or introducing air to make the gripper soft. While ground coffee is a common choice for jamming particles, glass, plastic, and metallic beads have also been used [25]. Lipson and Amend proposed a two-finger R-H with granular jamming fingers, demonstrating high dexterity in manipulating small objects such as chopsticks [68]. Similarly, Osamah [69] developed a two-finger R-H that utilized vacuum pressure to control stiffness and the finger structure to prevent slippage during grasping as seen in Figure 1 (top). Chow introduced a two-finger granular tendon gripper as shown in Figure 1 (bottom), with a hybrid structure composed of a rigid finger-like skeleton and attached granular pouches [70]. This gripper could lift various objects, including cylinders, brackets, sachets, pulley gears, and bolts.
Low-melting-point alloys (LMPAs) are materials that undergo a phase transition from solid to liquid when exposed to heat. This property is harnessed to achieve variable stiffness structures in the fingers of grippers [71]. Shintake [72] developed a two-finger soft gripper that integrated an LMPA track and pre-stretched dielectric elastomer actuator (DEA). The LMPA track within the finger responded to thermal energy. In its liquid state, the gripper exhibited a soft structure, and electrostatic actuation from the DEAs flattened the finger. To achieve rigid finger shapes, heat was removed from the LMPA while keeping the DEAs actuated. Despite weighing only 2 g, the gripper was able to lift a plastic dish containing 11 grams of metal washers, which was 5.5 times its own weight. SMPs and SMAs have also been employed to adjust the stiffness of grippers through phase transitions. Given that SMPs exhibit greater relative stiffness changes and lower moduli in both rigid and soft states compared to SMAs, researchers' focus is primarily on using SMPs coupled with soft actuators as variable-stiffness components [73][74][75].
Researchers Patel [76] and Thrasher [77] developed three-fingered grippers made from UV-curable elastomers. These grippers offered a modular approach to manipulation tasks. Grippers based on SMPs and SMAs have also been explored for their ability to provide variable stiffness. Wang and Anh [78] introduced an SMP-based soft gripper with three identical fingers, each featuring a soft-composite actuator with a changeable-stiffness material. The fingers incorporated embedded Ni-chrome wires for heating the SMP structure, transitioning it from a glossy state to a rubbery state. The gripper could successfully grasp various objects, such as an egg, a capsicum, a hollow cylinder, and pyramid-shaped objects.
Origami-based tendon-driven three-fingered grippers (often referred to as robogami) were proposed by Firouzeh and Paik [79][80][81]. These grippers were manufactured using layer-by-layer techniques and integrated SMPs to control joint stiffness. The grippers adapted themselves to different objects using quasi-2D fabrication methods. Experimental tests included power and precision grasps, involving the manipulation of an egg with a power grasp and a coin with a precision grasp.
Mingfang [82] presented another shape-memory-alloy-based soft gripper with variable stiffness, featuring an 18-fold stiffness enhancement for each finger. This gripper’s core design included a self-activated actuator with flexible bending deformation and shape-retaining abilities, incorporating two changeable-stiffness joints. The gripper’s construction involved five types of materials: SMA wire, paraffin, Ni-Cr wire, silicone rubber, and PLA plastic. The gripper’s variable stiffness allowed it to pick up objects such as a square box using actuated joint 2 and a plastic cup or an orange using actuated joint 1.
Since SMAs and SMPs exhibit changes in stiffness through phase transitions, they have been utilized by researchers to develop multi-finger grippers. Behl [83] presented a four-finger gripper with a bi-directional SMP that was able to pick up and place a coin. Moreover, She [84] developed an R-H where each finger was comprised of SMA material strips. The integration of SMA materials into grippers allows for greater flexibility in object manipulation. In addition, Shahinpoor [85] developed a four-finger gripper using ionic polymer metal composites (IPMCs).
3.3. Soft Grippers with Gripping by Controlled Adhesion
The fluidic elastomer actuator (FEA) is one of the oldest actuation technologies in soft robotics and was used by Suzumori [86] to develop a four-fingered gripper. The gripper consisted of three pneumatic chambers that allowed for the dexterous grasping of objects like a beaker containing liquid and a metallic wrench, as well as the ability to tighten a bolt without the need for external tools. Several other researchers have developed multi-finger grippers or R-Hs using FEAs, including a six-fingered gripper [87] that could bend upwards and downwards and pick up a raw egg, a five-fingered R-H presented by Yamaguchi [88] that was able to pick up a cup and tape roll, and an R-H introduced by Niiyama [89] with pneumatic pouch actuators and structures that could be printed in 15 min.
References
- Kapandji, I. The Physiology of the Joints: Lower Limb; Edinburgh Churchill Livingstone: Edinburgh, UK, 1987.
- Schlesinger, G. The mechanical structure of the artificial limbs. In Replacement Links and Work Aids: For War Disabled and Accident Victims; Julius Springer: Berlin/Heidelberg, Germany, 1919; pp. 321–661.
- Napier, J.R. The prehensile movements of the human hand. J. Bone Jt. Surgery Br. Vol. 1956, 38, 902–913.
- Samadikhoshkho, Z.; Zareinia, K.; Janabi-Sharifi, F. A Brief Review on Robotic Grippers Classifications. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; pp. 1–4.
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035.
- Zhou, L.; Ren, L.; Chen, Y.; Niu, S.; Han, Z.; Ren, L. Bio-Inspired Soft Grippers Based on Impactive Gripping. Adv. Sci. 2021, 8, 2002017.
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185.
- Catalano, M.G.; Grioli, G.; Farnioli, E.; Serio, A.; Piazza, C.; Bicchi, A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int. J. Robot. Res. 2014, 33, 768–782.
- Dickinson, M.H.; Farley, C.T.; Full, R.J.; Koehl, M.; Kram, R.; Lehman, S. How animals move: An integrative view. Science 2000, 288, 100–106.
- Zheng, W.; Xie, Y.; Zhang, B.; Zhou, J.; Zhang, J. Dexterous robotic grasping of delicate fruits aided with a multi-sensory e-glove and manual grasping analysis for damage-free manipulation. Comput. Electron. Agric. 2021, 190, 106472.
- Dollar, A.M.; Howe, R.D. The Highly Adaptive SDM Hand: Design and Performance Evaluation. Int. J. Robot. Res. 2010, 29, 585–597.
- Crisman, J.; Kanojia, C.; Zeid, I. Graspar: A flexible, easily controllable robotic hand. IEEE Robot. Autom. Mag. 1996, 3, 32–38.
- Odhner, L.U.; Jentoft, L.P.; Claffee, M.R.; Corson, N.; Tenzer, Y.; Ma, R.R.; Buehler, M.; Kohout, R.; Howe, R.D.; Dollar, A.M. A compliant, underactuated hand for robust manipulation. Int. J. Robot. Res. 2014, 33, 736–752.
- Ciocarlie, M.; Hicks, F.M.; Holmberg, R.; Hawke, J.; Schlicht, M.; Gee, J.; Stanford, S.; Bahadur, R. The Velo gripper: A versatile single-actuator design for enveloping, parallel and fingertip grasps. Int. J. Robot. Res. 2014, 33, 753–767.
- Wolf, A.; Schunk, H. Grippers in Motion. In Grippers in Motion; Wolf, A., Schunk, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–13.
- Birglen, L.; Laliberté, T.; Gosselin, C. Underactuated Robotic Hands; Springer: Berlin/Heidelberg, Germany, 2008; Volume 40.
- Hirose, S.; Umetani, Y. The development of soft gripper for the versatile robot hand. Mech. Mach. Theory 1978, 13, 351–359.
- Bullock, I.M.; Dollar, A.M. Classifying human manipulation behavior. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6.
- Bullock, I.M.; Ma, R.R.; Dollar, A.M. A hand-centric classification of human and robot dexterous manipulation. IEEE Trans. Haptics 2012, 6, 129–144.
- Iberall, T. Human Prehension and Dexterous Robot Hands. Int. J. Robot. Res. 1997, 16, 285–299.
- Bicchi, A.; Marigo, A. Dexterous grippers: Putting nonholonomy to work for fine manipulation. Int. J. Robot. Res. 2002, 21, 427–442.
- Chen, F.; Cannella, F.; Canali, C.; D’Imperio, M.; Hauptman, T.; Sofia, G.; Caldwell, D. A study on data-driven in-hand twisting process using a novel dexterous robotic gripper for assembly automation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4470–4475.
- Tincani, V.; Grioli, G.; Catalano, M.G.; Garabini, M.; Grechi, S.; Fantoni, G.; Bicchi, A. Implementation and control of the velvet fingers: A dexterous gripper with active surfaces. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2744–2750.
- Samuels, M.; Lu, L.; Wang, C. Two-finger Multi-DOF Folding Robot Grippers. IFAC-PapersOnLine 2022, 55, 76–81.
- Loeve, A.; Ven, O.; Vogel, J.; Breedveld, P.; Dankelman, J. Vacuum packed particles as flexible endoscope guides with controllable rigidity. Granul. Matter 2010, 12, 543–554.
- Courchesne, J.; Cardou, P.; Rachide Onadja, P.A. A compact underactuated gripper with two fingers and a retractable suction cup. Front. Robot. AI 2023, 10, 1066516.
- Townsend, W.T. BarrettHand Grasper: Programmably Flexible Part Handling and Assembly. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Dordrecht, The Netherlands, 2019; pp. 535–551.
- Backus, S.B.; Dollar, A.M. An Adaptive Three-Fingered Prismatic Gripper with Passive Rotational Joints. IEEE Robot. Autom. Lett. 2016, 1, 668–675.
- Ciocarlie, M.; Miller, A.; Allen, P. Grasp analysis using deformable fingers. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 4122–4128.
- Hanafusa, H.; Asada, H.H. A robot hand with elastic fingers and its application to assembly process. IFAC-PapersOnLine 1977, 10, 127–138.
- Rodriguez, A. Shape for Contact. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2013.
- Sompur, V.; Thondiyath, A.; SKM, V. Design and Development of a Bio-Inspired Novel 3-Fingered Gripper Platform. In Proceedings of the AIR2021: Advances in Robotics-5th International Conference of the Robotics Society, New York, NY, USA, 1 June 2022.
- Jacobsen, S.; Iversen, E.; Knutti, D.; Johnson, R.; Biggers, K. Design of the Utah/MIT dextrous hand. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 1520–1532.
- Jacobsen, S.C.; Wood, J.E.; Knutti, D.; Biggers, K.B. The UTAH/MIT dextrous hand: Work in progress. Int. J. Robot. Res. 1984, 3, 21–50.
- Biggers, K.; Jacobsen, S.; Gerpheide, G. Low level control of the Utah/MIT dextrous hand. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 61–66.
- Salisbury, J.K.; Craig, J.J. Articulated Hands: Force Control and Kinematic Issues. Int. J. Robot. Res. 1982, 1, 4–17.
- Jau, B. Dexterous telemanipulation with four fingered hand system. In Proceedings of the Proceedings of 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 1, pp. 338–343.
- Kyriakopoulos, K.; Van Riper, J.; Zink, A.; Stephanou, H. Kinematic analysis and position/force control of the Anthrobot dextrous hand. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1997, 27, 95–104.
- Bekey, G.A.; Tomovic, R.; Zeljkovic, I. Control architecture for the Belgrade/USC hand. In Dextrous Robot Hands; Springer: Berlin, Germany, 1990.
- Rosheim, M.E. Robot Evolution: The Development of Anthrobotics; John Wiley & Sons: Hoboken, NJ, USA, 1994.
- Lin, L.R.; Huang, H.P. Integrating fuzzy control of the dexterous National Taiwan University (NTU) hand. IEEE/ASME Trans. Mechatron. 1996, 1, 216–229.
- Butterfass, J.; Hirzinger, G.; Knoch, S.; Liu, H. DLR’s multisensory articulated hand. I. Hard- and software architecture. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20 May 1998; Volume 3, pp. 2081–2086.
- Liu, H.; Meusel, P.; Seitz, N.; Willberg, B.; Hirzinger, G.; Jin, M.; Liu, Y.; Wei, R.; Xie, Z. The modular multisensory DLR-HIT-Hand. Mech. Mach. Theory 2007, 42, 612–625.
- Liu, H.; Wu, K.; Meusel, P.; Seitz, N.; Hirzinger, G.; Jin, M.; Liu, Y.; Fan, S.; Lan, T.; Chen, Z. Multisensory five-finger dexterous hand: The DLR/HIT Hand II. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3692–3697.
- Kawasaki, H.; Komatsu, T.; Uchiyama, K. Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu hand II. IEEE/ASME Trans. Mechatron. 2002, 7, 296–303.
- Gupta, A.; Eppner, C.; Levine, S.; Abbeel, P. Learning Dexterous Manipulation for a Soft Robotic Hand from Human Demonstrations. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 3786–3793.
- Bryan, P.; Kumar, S.; Sahin, F. Design of a Soft Robotic Gripper for Improved Grasping with Suction Cups. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October2019; pp. 2405–2410.
- Wang, Z.; Zhu, M.; Kawamura, S.; Hirai, S. Comparison of different soft grippers for lunch box packaging. Robot. Biomimetics 2017, 4, 10.
- Petković, D.; Issa, M.; Pavlović, N.D.; Zentner, L.; Ćojbašić, Ž. Adaptive neuro fuzzy controller for adaptive compliant robotic gripper. Expert Syst. Appl. 2012, 39, 13295–13304.
- Petković, D.; Pavlović, N.D.; Shamshirband, S.; Badrul Anuar, N. Development of a new type of passively adaptive compliant gripper. Ind. Robot. Int. J. 2013, 40, 610–623.
- Belzile, B.; Birglen, L. A compliant self-adaptive gripper with proprioceptive haptic feedback. Auton. Robot. 2014, 36, 79–91.
- Liu, C.H.; Huang, G.F.; Chiu, C.H.; Pai, T.Y. Topology synthesis and optimal design of an adaptive compliant gripper to maximize output displacement. J. Intell. Robot. Syst. 2018, 90, 287–304.
- Ma, S.; Hirose, S.; Yoshinada, H. Design and experiments for a coupled tendon-driven manipulator. IEEE Control Syst. Mag. 1993, 13, 30–36.
- Ma, R.; Dollar, A. Yale OpenHand Project: Optimizing Open-Source Hand Designs for Ease of Fabrication and Adoption. IEEE Robot. Autom. Mag. 2017, 24, 32–40.
- Zolfagharian, A.; Gharaie, S.; Gregory, J.; Bodaghi, M.; Kaynak, A.B.; Nahavandi, S. A Bioinspired Compliant 3D-Printed Soft Gripper. Soft Robot. 2021, 9, 680–689.
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in Soft Robotics: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2016, 23, 93–106.
- Beddow, L.; Wurdemann, H.; Kanoulas, D. A Caging Inspired Gripper using Flexible Fingers and a Movable Palm. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7195–7200.
- Meng, J.; Gerez, L.; Chapman, J.; Liarokapis, M. A Tendon-Driven, Preloaded, Pneumatically Actuated, Soft Robotic Gripper with a Telescopic Palm. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 476–481.
- Abo-Ismail, A. On the development of a new pneumatic versatile gripper. Proc. JFPS Int. Symp. Fluid Power 1993, 1993, 701–706.
- Dollar, A.M.; Howe, R.D. The SDM Hand: A Highly Adaptive Compliant Grasper for Unstructured Environments. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2008.
- Shimoga, K.; Goldenberg, A. Soft materials for robotic fingers. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; Volume 2, pp. 1300–1305.
- Cutkosky, M.; Jourdain, J.; Wright, P. Skin materials for robotic fingers. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; Volume 4, pp. 1649–1654.
- Xu, Z.; Todorov, E. Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3485–3492.
- Sun, L.; Huang, W.; Ding, Z.; Zhao, Y.; Wang, C.; Purnawali, H.; Tang, C. Stimulus-responsive shape memory materials: A review. Mater. Des. 2012, 33, 577–640.
- Monkman, G. Advances in shape memory polymer actuation. Mechatronics 2000, 10, 489–498.
- Lan, C.C.; Lin, C.M.; Fan, C.H. A Self-Sensing Microgripper Module with Wide Handling Ranges. IEEE/ASME Trans. Mechatron. 2011, 16, 141–150.
- Nagase, J.-y.; Wakimoto, S.; Satoh, T.; Saga, N.; Suzumori, K. Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators. Smart Mater. Struct. 2011, 20, 105015.
- Amend, J.; Lipson, H. The JamHand: Dexterous manipulation with minimal actuation. Soft Robot. 2017, 4, 70–80.
- Fakhri, O.; Youssef, G.; Nacy, S.; Jameel Al-Tamimi, A.N.; Hussein, O.; Abbood, W.T.; Abdullah, O.I.; AL-Karkhi, N.K. A Systematic Approach to Stable Grasping of a Two-Finger Robotic Hand Activated by Jamming of Granular Media. Electronics 2023, 12, 1902.
- Nguyen, V.P.; Dhyan, S.B.; Han, B.S.; Chow, W.T. Universally Grasping Objects with Granular—Tendon Finger: Principle and Design. Micromachines 2023, 14, 1471.
- Siegel, A.; Bruzewicz, D.; Weibel, D.; Whitesides, G. Microsolidics: Fabrication of three-dimensional metallic microstructures in poly(dimethylsiloxane). Adv. Mater. 2007, 19, 727–733.
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1097–1102.
- Yun, S.; Niu, X.; Yu, Z.; Hu, W.; Brochu, P.; Pei, Q. Compliant silver nanowire-polymer composite electrodes for bistable large strain actuation. Adv. Mater. 2012, 24, 1321–1327.
- Besse, N.; Rosset, S.; Zarate, J.J.; Shea, H. Flexible active skin: Large reconfigurable arrays of individually addressed shape memory polymer actuators. Adv. Mater. Technol. 2017, 2, 1700102.
- Takashima, K.; Sugitani, K.; Morimoto, N.; Sakaguchi, S.; Noritsugu, T.; Mukai, T. Pneumatic artificial rubber muscle using shape-memory polymer sheet with embedded electrical heating wire. Smart Mater. Struct. 2014, 23, 125005.
- Patel, D.K.; Sakhaei, A.H.; Layani, M.; Zhang, B.; Ge, Q.; Magdassi, S. Highly stretchable and UV curable elastomers for digital light processing based 3D printing. Adv. Mater. 2017, 29, 1606000.
- Thrasher, C.J.; Schwartz, J.J.; Boydston, A.J. Modular elastomer photoresins for digital light processing additive manufacturing. ACS Appl. Mater. Interfaces 2017, 9, 39708–39716.
- Wang, W.; Ahn, S. Non-intrusive load monitoring system for anomaly detection based on energy disaggregation by cascading semi-supervised learning and deep learning methods. Soft Robot. 2017, 3, 379.
- Firouzeh, A.; Paik, J. Grasp Mode and Compliance Control of an Underactuated Origami Gripper Using Adjustable Stiffness Joints. IEEE/ASME Trans. Mechatron. 2017, 22, 2165–2173.
- Firouzeh, A.; Paik, J. An under-actuated origami gripper with adjustable stiffness joints for multiple grasp modes. Smart Mater. Struct. 2017, 26, 055035.
- Firouzeh, A.; Salerno, M.; Paik, J. Stiffness Control with Shape Memory Polymer in Underactuated Robotic Origamis. IEEE Trans. Robot. 2017, 33, 765–777.
- Liu, M.; Hao, L.; Zhang, W.; Zhao, Z. A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420907813.
- Biswas, A.; Aswal, V.K.; Sastry, P.U.; Rana, D.; Maiti, P. Reversible Bidirectional Shape Memory Effect in Polyurethanes through Molecular Flipping. Macromolecules 2016, 49, 4889–4897.
- She, Y.; Chen, J.; Shi, H.; Su, H.-J. Modeling and Validation of a Novel Bending Actuator for Soft Robotics Applications. Soft Robot. 2016, 3, 71–81.
- Shahinpoor, M.; Bar-Cohen, Y.; Simpson, J.O.; Smith, J. Ionic polymer-metal composites (IPMCs) as biomimetic sensors, actuators and artificial muscles—A review. Smart Mater. Struct. 1998, 7, R15.
- Suzumori, K.; Iikura, S.; Tanaka, H. Applying a flexible microactuator to robotic mechanisms. IEEE Control Syst. Mag. 1992, 12, 21–27.
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935.
- Yamaguchi, A.; Takemura, K.; Yokota, S.; Edamura, K. A robot hand using electro-conjugate fluid. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5923–5928.
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch motors: Printable soft actuators integrated with computational design. Soft Robot. 2015, 2, 59–70.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.4K
Revisions:
2 times
(View History)
Update Date:
04 Dec 2023
Table of Contents




Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No