Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Hyoseong Hwang | -- | 1339 | 2023-11-17 15:33:02 | | | |
| 2 | Jessie Wu | Meta information modification | 1339 | 2023-11-20 04:30:45 | | | | |
| 3 | Jessie Wu | + 4 word(s) | 1343 | 2023-11-20 04:31:21 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Hwang, H.; Joe, I. Ship Automation System and Ship Data Collection. Encyclopedia. Available online: https://encyclopedia.pub/entry/51758 (accessed on 26 July 2026).
Hwang H, Joe I. Ship Automation System and Ship Data Collection. Encyclopedia. Available at: https://encyclopedia.pub/entry/51758. Accessed July 26, 2026.
Hwang, Hyoseong, Inwhee Joe. "Ship Automation System and Ship Data Collection" Encyclopedia, https://encyclopedia.pub/entry/51758 (accessed July 26, 2026).
Hwang, H., & Joe, I. (2023, November 17). Ship Automation System and Ship Data Collection. In Encyclopedia. https://encyclopedia.pub/entry/51758
Hwang, Hyoseong and Inwhee Joe. "Ship Automation System and Ship Data Collection." Encyclopedia. Web. 17 November, 2023.
Copy Citation
As technologies such as eco-friendly ships, electric propulsion vessels, and multi-fuel propulsion systems advance, the scope of IoT applications in maritime fields is expanding, resulting in increased complexity in control factors. The gradual progression towards Maritime Autonomous Surface Ships (MASS) is further driving the evolution of ship-based IoT applications. These advancements underscore the necessity for a platform capable of ensuring reliable connectivity between ships and onshore.
multi-region fog cloud
ship multi-service platform
Internet of Things (IoT)
collision avoidance
Automatic Identification System (AIS)
1. Ship Automation System
The ship’s automation system plays a crucial role in aiding users in making informed decisions by collecting and conveying operational data, while also integrating control components to ensure the ship adheres to these decisions. Figure 1 illustrates a comprehensive configuration consisting of two essential systems: The Integrated Navigation System (INS) for ship navigation and the Integrated Control and Monitoring System overseeing control of onboard facilities. Within the INS, critical unit systems like the Electronic Chart Display Information System (ECDIS), RADAR, Track Control System (TCS), Bridge Alarm Monitoring System (BAMS), and Autopilot work harmoniously, playing vital roles in planning and executing the ship’s route. The INS follows the IEC61924-2 standard, precisely defining its modular structure and performance criteria, ensuring the monitoring of connected sensor availability, effectiveness, and integrity [1].
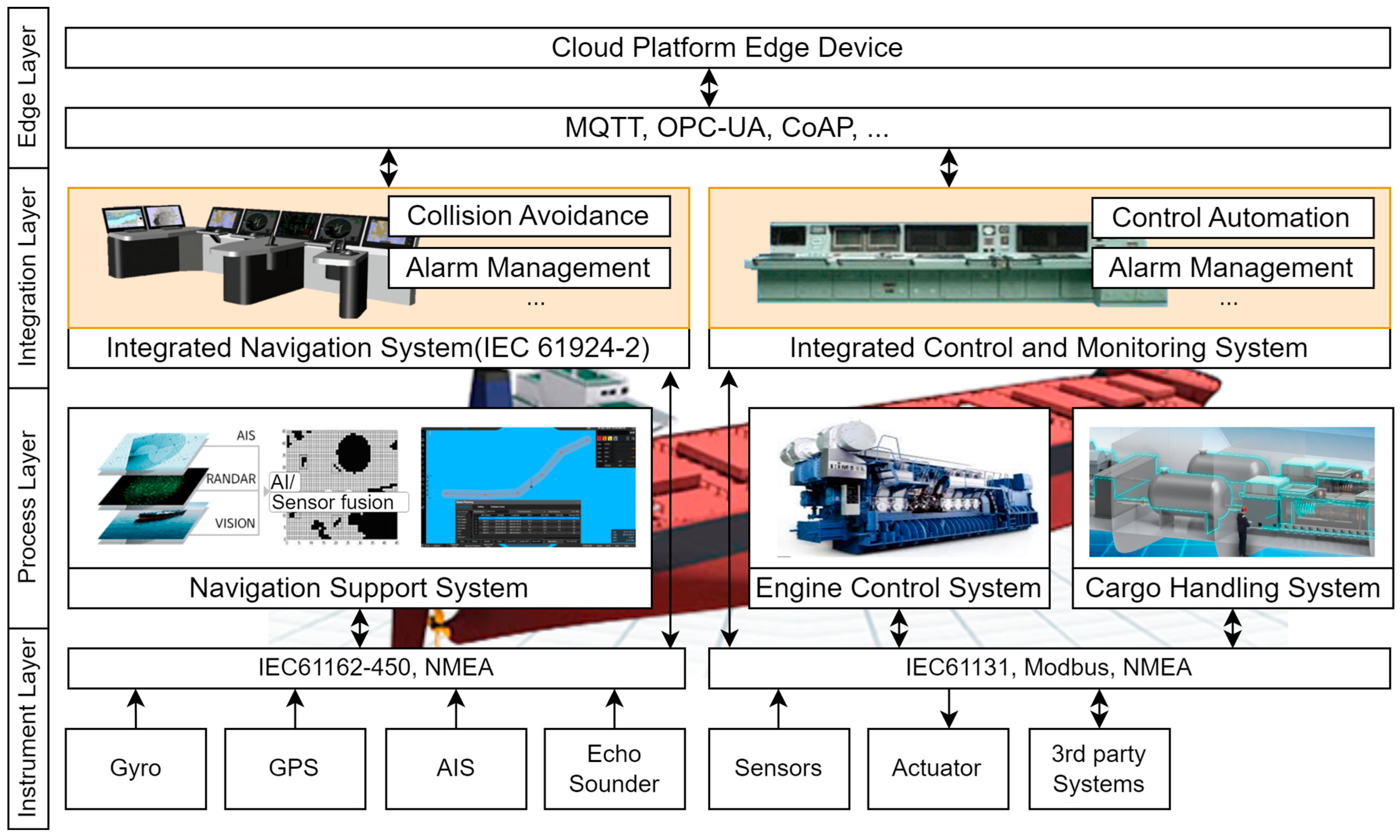
Figure 1. Conceptual diagram of ship automation system.
While traditional INS systems mainly support human decision-making by visualizing data, ongoing research aims to minimize human intervention and empower the system to navigate autonomously by perceiving its surroundings. Studies focus on developing stable algorithms, guidance, and control mechanisms for collision avoidance, with the goal of significantly enhancing the system’s capability to effectively avert potential collisions [2][3].
The ship is outfitted with an Integrated Control and Monitoring System (ICMS), functioning as a decentralized control system overseeing the operation of machinery and electrical equipment. Figure 2 illustrates the system architecture of ICMS. The green section signifies the area where the controller manages each piece of equipment. Within the orange area is the Operator Work Station (OWS), offering a Human Machine Interface (HMI) for users to monitor or directly control the operational status. The rising demand for eco-friendly ships, such as LNG carriers, electric propulsion vessels, and Dual Fuel Engine ships, has introduced greater complexity and diversity of control factors within the ICMS. To address these advancements, dedicated research efforts are concentrated on creating an environment that supports the swift and secure development of sophisticated ships and control technologies, leveraging digital twin technology [4]. Furthermore, ongoing studies aim to integrate and optimize systems through virtual simulation environments [5]. However, to transform these research activities into tangible outcomes and effectively implement them on actual ships, the existence of a real-time data platform seamlessly connecting and managing ship data is imperative.
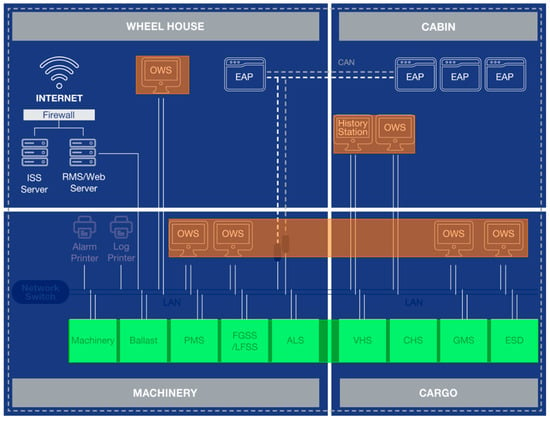
Figure 2. System Architecture of ICMS.
2. Generation and Propagation of Ship Navigation Data
The ship’s navigation-related sensor data is generated following the IEC61162-1 standard [6] in the case of serial communication and the IEC61162-450 standard [7] for Ethernet communication, which has been expanded to handle various types of data. The Automatic Identification System (AIS) extracts the data generated by these protocols and disseminates messages containing the location and voyage information of the ship to surrounding vessels over the Very High Frequency (VHF) frequency. The transmission period is shorter for faster vessels, ensuring neighboring ships can promptly and safely detect them.
The AIS data encompasses different categories based on message types [8]. Among these, the message types directly related to navigation status are 1, 2, and 3, allowing ships to gain insight into the current navigation status and the locations of surrounding vessels through the distribution of these messages. Additionally, AIS transmits the data it sends and receives to the INS network using a standard protocol based on IEC61162-1 [6], enabling navigation equipment to comprehend the surrounding context and display relevant data to users.
Numerous ongoing studies are actively striving to enhance the operational and management performance of ships through the effective utilization of AIS data. In [9], researchers integrated AIS data to cluster ship trajectories, suggesting its potential use in collision avoidance by predicting ship paths. In [10], a preprocessing technique was proposed to manage and analyze the substantial quantities of AIS data collected. This technique aimed to enhance data management performance and route monitoring capabilities. Recognizing the limitations imposed by the limited transmission distance of AIS data through VHF due to Earth’s curvature, research is underway to harness satellites for collecting and utilizing a broader spectrum of AIS data, as demonstrated in [11]. This research successfully tracked ships through coastal images and AIS data obtained from satellites, effectively detecting unauthorized ship access.
While AIS data provides substantial navigational information, it is confined to data pertinent to the current ship state due to bandwidth restrictions. As the deployment of Low Earth Orbit (LEO) satellites expands the communication connectivity of ships and the phased realization of Maritime Autonomous Surface Ships (MASS) necessitates more advanced automation, a broader array of data delivery methods is imperative. This need arises to address the evolving requirements of maritime systems and unlock the potential benefits of advanced autonomous ship capabilities.
3. Ship Data Collection and Service
In conjunction with AIS data, a multitude of sensors embedded in engine systems, including the engines themselves, generate real-time data based on the ship’s operational status. Diverse research endeavors are actively contributing to the creation of a comprehensive platform capable of gathering such ship-related data and facilitating the expansion of data sharing and functionalities between ships and onshore systems.
In [12], the research centers on applying IoT technologies to unmanned ships, exploring intelligent recognition, sensor fusion, and communication. This research culminates in the proposal of an E-Navigation framework aimed at connecting ships with onshore systems. In [13], a Machine-Type Communication Framework is presented to enable efficient communication between peripheral ships and cloud systems, utilizing short-range and broadband connections. It aims to enhance MASS capabilities, promote interoperability, and facilitate seamless data exchange and collaboration in the maritime domain.
As the integration of IoT technology in ships advances, research has also delved into new services and service management. In addition to the earlier discussion on collision avoidance, there is a significant focus on creating optimal routes using weather forecast data to enhance operational performance in a safe and cost-effective manner [14]. In addition, there has been research aimed at creating an Operator Training Simulator (OTS) environment. This simulation setup onshore closely replicates the ship’s operating conditions [15]. The primary purpose of the OTS environment is to train both the crew and the ship’s system to collaborate effectively, eliminating the need to physically visit the site during the development stage of ship operation technology, which is becoming increasingly intricate. An investigation in [16] revealed that education through remote OTS environments contributes to enhanced navigation skills, especially as we move towards an era of training remote operators to handle actual MASS.
The expansion of technology and services in the maritime industry has led to a growing number of software applications that need to be managed. This increase in software complexity has posed challenges in management. In [17], a study was conducted to address this issue by efficiently allocating Software Quality Assurance (SQA) resources in ship operating environments. The focus was on predicting defects in newly developed software based on models trained using historical software defect data. As software becomes increasingly vital for ship operations, the importance and reliance on S/W quality management techniques have grown. This has created an essential research area dedicated to maintaining service quality within the unique context of the maritime environment.
Research was also conducted to build a cloud-based IoT service platform in conjunction with ship IoT devices [18][19][20]. Cloud platforms provide scalability, flexibility, security, and availability, which makes them well-suited for creating expansive IoT environments [21]. In [22], prominent cloud-based IoT platforms like AWS IoT, Azure IoT, Watson IoT, PTC ThingWorx, and Google IoT are identified. The research affirms that these public clouds provide essential functionalities for constructing extensive IoT environments. Among them, AWS IoT is the most widely used public cloud, boasting numerous references and ongoing research in designing and implementing structures tailored to specific applications and purposes [23][24].
References
- IEC61924-2; Maritime Navigation and Radiocommunication Equipment and Systems—Integrated Navigation Systems (INS). IEC Standard: Geneva, Switzerland, 2021.
- Akdağ, M.; Solnør, P.; Johansen, T.A. Collaborative collision avoidance for Maritime Autonomous Surface Ships: A review. Ocean Eng. 2022, 250, 110920.
- Nielsen, R.E.; Papageorgiou, D.; Nalpantidis, L.; Jensen, B.T.; Blanke, M. Machine learning enhancement of manoeuvring prediction for ship Digital Twin using full-scale recordings. Ocean. Eng. 2022, 257, 111579.
- Madusanka, N.S.; Fan, Y.; Yang, S.; Xiang, X. Digital Twin in the Maritime Domain: A Review and Emerging Trends. J. Mar. Sci. Eng. 2023, 11, 1021.
- CIMAC. Guideline from CIMAC WG20 System Integration. Virtual System Integration & Simulation—A Performance-Oriented Approach for Guiding System Simulation in the Field of Hybrid Marine Applications; CIMAC: Paris, France, 2023.
- IEC61162-1; Maritime Navigation and Radiocommunication Equipment and Systems—Digital Interfaces—Part 1: Single Talker and Multiple Listeners. IEC Standard: Geneva, Switzerland, 2016.
- IEC61162-450; Maritime Navigation and Radiocommunication Equipment and Systems—Digital Interfaces—Part 450: Multiple Talkers and Multiple Listeners—Ethernet Interconnection. IEC Standard: Geneva, Switzerland, 2016.
- Svanberg, M.; Santén, V.; Hörteborn, A.; Holm, H.; Finnsgård, C. AIS in maritime research. Mar. Policy 2019, 106, 103520.
- Urakami, M.; Wakabayashi, N.; Watanabe, T. A Study on Location Information Screening Method for Ship Application Using AIS Recorded Data. In Proceedings of the 2018 International Conference on Broadband Communications for Next Generation Networks and Multimedia Applications (CoBCom), Graz, Austria, 11–13 July 2018; pp. 1–6.
- Wang, C.; Zhu, M.; Osen, O.; Zhang, H.; Li, G. AIS data-based probabilistic ship route prediction. In Proceedings of the 2023 IEEE 6th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 24–26 February 2023; Volume 6, pp. 167–172.
- Kurekin, A.A.; Loveday, B.R.; Clements, O.; Quartly, G.D.; Miller, P.I.; Wiafe, G.; Agyekum, K.A. Operational monitoring of illegal fishing in Ghana through exploitation of satellite earth observation and AIS data. Remote Sens. 2019, 11, 293.
- Wang, J.; Xiao, Y.; Li, T.; Chen, C.P. A Survey of Technologies for Unmanned Merchant Ships. IEEE Access 2020, 8, 224461–224486.
- Zhang, J.; Wang, M.M.; You, X. Maritime Autonomous Surface Shipping from a Machine-Type Communication Perspective. IEEE Commun. Mag. 2023.
- Zis, T.P.; Psaraftis, H.N.; Ding, L. Ship weather routing: A taxonomy and survey. Ocean Eng. 2020, 213, 107697.
- Hwang, T.; Youn, I.-H. Difficulty Evaluation of Navigation Scenarios for the Development of Ship Remote Operators Training Simulator. Sustainability 2022, 14, 11517.
- Hwang, H.; Hwang, T.; Youn, I.H. Effect of Onboard Training for Improvement of Navigation Skill under the Sim-ulated Navigation Environment for Maritime Autonomous Surface Ship Operation Training. Appl. Sci. 2022, 12, 9300.
- Kang, J.; Ryu, D.; Baik, J. Predicting just-in-time software defects to reduce post-release quality costs in the maritime industry. Softw. Pract. Exp. 2020, 51, 748–771.
- Yang, J.; Wen, J.; Wang, Y.; Jiang, B.; Wang, H.; Song, H. Fog-based marine environmental information monitoring toward ocean of things. IEEE Internet Things J. 2019, 7, 4238–4247.
- Cui, K.; Lin, B.; Sun, W.; Sun, W. Learning-based task offloading for marine fog-cloud computing networks of USV cluster. Electronics 2019, 8, 1287.
- Cankar, M.; Stanovnik, S. Maritime IoT solutions in fog and cloud. In Proceedings of the 2018 IEEE/ACM International Conference on Utility and Cloud Computing Companion (UCC Companion), Zurich, Switzerland, 17–20 December 2018; pp. 284–289.
- Gallagher, D.; Lennon, R.G. Architecting Multi-Cloud Applications for High Availability using DevOps. In Proceedings of the 2022 IEEE International Conference on e-Business Engineering (ICEBE), Bournemouth, UK, 14–16 October 2022; pp. 112–118.
- Barros, T.G.F.; Neto, E.F.D.S.; Neto, J.A.D.S.; De Souza, A.G.M.; Aquino, V.B.; Teixeira, E.S. The Anatomy of IoT Platforms—A Systematic Multivocal Mapping Study. IEEE Access 2022, 10, 72758–72772.
- Kodali, R.K.; Sabu, A.C. Aqua monitoring system using aws. In Proceedings of the 2022 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 25–27 January 2022; pp. 1–5.
- Battula, S.; Kumar, M.N.V.S.S.; Panda, S.K.; Rao, U.M.; Laveti, G.; Mouli, B. Online ocean monitoring using edge IoT. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–7.
More
Information
Subjects:
Computer Science, Software Engineering
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.8K
Revisions:
3 times
(View History)
Update Date:
20 Nov 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No