Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Maoyi Wang | -- | 4769 | 2023-10-06 11:29:52 | | | |
| 2 | Rita Xu | -3 word(s) | 4766 | 2023-10-07 04:25:05 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Dai, J.; Wang, M.; Wu, B.; Shen, J.; Wang, X. Wi-Fi Assisted Indoor Positioning. Encyclopedia. Available online: https://encyclopedia.pub/entry/49873 (accessed on 23 June 2026).
Dai J, Wang M, Wu B, Shen J, Wang X. Wi-Fi Assisted Indoor Positioning. Encyclopedia. Available at: https://encyclopedia.pub/entry/49873. Accessed June 23, 2026.
Dai, Jihan, Maoyi Wang, Bochun Wu, Jiajie Shen, Xin Wang. "Wi-Fi Assisted Indoor Positioning" Encyclopedia, https://encyclopedia.pub/entry/49873 (accessed June 23, 2026).
Dai, J., Wang, M., Wu, B., Shen, J., & Wang, X. (2023, October 06). Wi-Fi Assisted Indoor Positioning. In Encyclopedia. https://encyclopedia.pub/entry/49873
Dai, Jihan, et al. "Wi-Fi Assisted Indoor Positioning." Encyclopedia. Web. 06 October, 2023.
Copy Citation
As the location-based service (LBS) plays an increasingly important role in real life, the topic of positioning attracts more and more attention. Under different environments and principles, researchers have proposed a series of positioning schemes and implemented many positioning systems.
Wi-Fi
indoor positioning
angle-of-arrival
1. Introduction
With the development of technology, the location information of people and objects can be obtained with ease. Location-based service (LBS) changes the way people live and plays an increasingly important role in various fields, e.g., navigation, logistics, outdoor games, tracking of key personnel, disaster relief, and advertisement. Researchers and engineers have developed various positioning schemes to support the LBS.
Wireless positioning can be classified into outdoor and indoor scenarios. While outdoor positioning technologies have been maturely developed and widely adopted in civilian and military fields [1][2], they are still barely satisfactory in indoor scenarios for two reasons. First, the complex indoor environment complicates the signal propagation [3]. Second, the occlusive adjoining wall reduces the signal strength of the positioning system [4]. Thus, the accuracy of the positioning system suffers in the indoor environment. Instead, compared with the outdoor scenario, the indoor scenario requires higher positioning accuracy for LBS. Moreover, people may usually spend much more time indoors than outdoors [5], which enlarges the demand for indoor positioning.
The technology of wireless fidelity (Wi-Fi) has been attracting extensive attention from researchers due to its wide coverage, high popularity, and low power consumption. As Wi-Fi protocol standards are continually upgraded, corresponding networks and devices are rapidly iterating. The latest Wi-Fi 7 newly releases 6 GHz frequency band with a greater channel bandwidth. An increasing number of Wi-Fi devices are equipped with fine timing measurement (FTM) [6] and channel state information (CSI) measurement. These are beneficial for improving positioning accuracy. Therefore, Wi-Fi is a promising solution to indoor positioning.
2. Wi-Fi-Assisted Schemes on Different Principles
A typical Wi-Fi-assisted indoor positioning scheme is generally based on principles like AoA, RSSI, or time. Additionally, hybrid schemes combining multiple principles are also prevalent.
2.1. AoA
Wi-Fi-assisted schemes based on AoA were applied to indoor positioning for a long time. Many schemes with different focuses were proposed. Researchers first describe the principle of AoA estimation and AoA-based indoor positioning. Then, researchers divide the representative work of AoA-based schemes into single-AP schemes and multi-AP schemes, and subdivide the multi-AP schemes based on various optimization directions of AoA estimation.
2.1.1. Principle
The angle of signals received by the antenna array on the AP is referred to as AoA [4]. The indoor positioning based on AoA generally requires at least two APs. It uses the AoA of the signal and APs’ position to perform geometric positioning of the target. The signal’s AoA can be estimated by phase difference in the received signal from different antennas on the AP.
The principle of AoA estimation is illustrated in Figure 1. There is a device as a positioning target and a two-antenna AP in the figure. The AP has antenna 𝑥1 and 𝑥2. Let d denote the distance from 𝑥1 to the device, 𝜆 denote the wavelength of the signal, x denote the distance between two antennas. It is obvious that 𝑥sin𝜃 is the distance difference of signal propagation between two antennas. The distance difference can be calculated by the phase difference of received signals on the two antennas. Assuming the phase difference is denoted by 𝛼, then researchers have 𝛼𝜆/2𝜋=𝑥sin𝜃. Researchers can express 𝜃 as

Figure 1. AoA estimation.
From Equation (1), researchers obtained the AoA of the signal. Specifically, when 𝑥=𝜆/2, 𝜃=arcsin(𝛼/𝜋).
The diagram of AoA-based indoor positioning is illustrated in Figure 2:
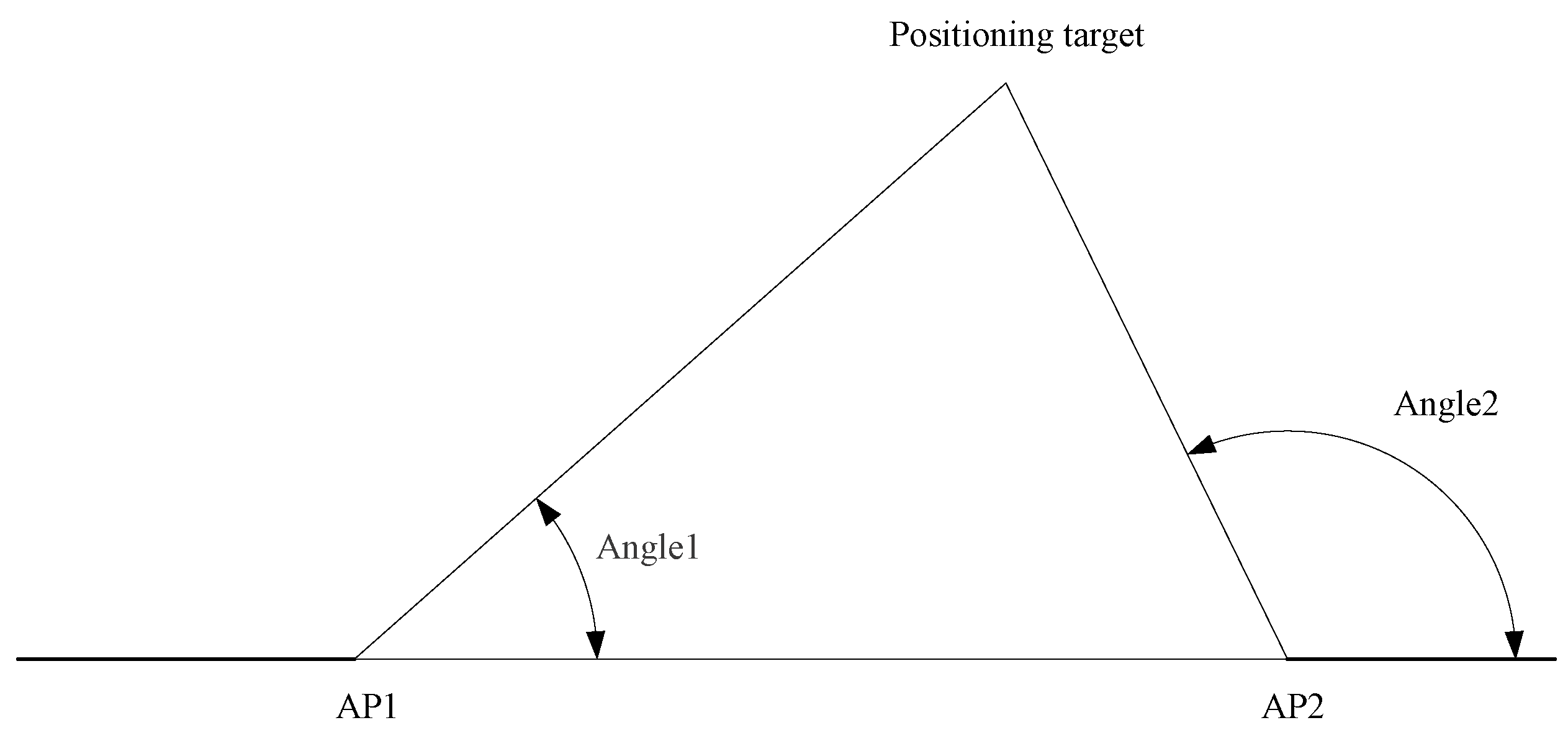
Figure 2. AoA-based indoor positioning.
Its advantages include its suitability for short-distance positioning, along with a simple positioning principle and no need for time synchronization. However, it comes with several disadvantages, which can be categorized as follows. First, it has a high requirement on the estimation accuracy of the signal incident angle. Even a minor error in this estimation may cause a significant position estimation error. Therefore, as the distance between the positioning target and the AP increases, the decrease in positioning accuracy becomes apparent. Second, the positioning accuracy is limited by the size of the AP antenna array, so there might be a relatively high hardware cost to achieve a good positioning accuracy. Finally, due to the complex indoor environment, the multi-path effect may be severe, which may seriously harm the accuracy of AoA-based indoor positioning.
2.1.2. Single-AP Schemes
The CUPID proposed by Sen et al., the spatial aliasing Wi-Fi localization (AWL) proposed by Chen et al., the TagFi proposed by Soltanaghaei et al. and the SAP-AoA proposed by Wang and Luan could use a single AP for localization [7][8][9][10].
The CUPID utilized the angle and distance of the direct path between the target and the AP for positioning. The angle was obtained by analyzing human mobility, while the distance was calculated by the energy of the direct path.
The AWL utilized the AoA of the signal from the positioning target to different antenna arrays on a single AP for positioning. It achieved decimeter-level positioning accuracy. The key to improving accuracy was using channel hopping to generate spatial aliasing and create virtual antennas.
The TagFi was a label positioning system that consisted of a single Wi-Fi device (e.g., laptop), a Wi-Fi transmitter, and labels. It applied a multiple signal classification (MUSIC) [11] based super-resolution algorithm to separate the label reflection from multi-path signals. On this basis, it estimated AoA and angle-of-departure (AoD) of the label reflection to determine the triangle with the Wi-Fi transmitter, the Wi-Fi device, and the label as vertices. Thereby, it obtained the label position.
The SAP-AoA located the target by using the distance between the two antennas on the AP and signals’ AoA received by them. They also explored the scheme of using FTM values in conjunction with SAP-AoA to achieve higher positioning accuracy.
2.1.3. Multi-AP Schemes
The positioning accuracy of AoA-based schemes was improved generally by optimizing AoA estimation. There were three main optimization directions of AoA estimation in the schemes researchers surveyed.
Some schemes focused on improving angle estimation accuracy by dealing with the multi-path effect. Xiong et al. proposed Arraytrack [4]. It estimated the angle of the direct path for positioning. For the multi-path effect, it combined the spatial smoothing algorithm and the MUSIC algorithm to reduce its impact. Zhang et al. proposed iLocScan [12], which was the first to utilize the multi-path effect to assist in estimating the AoA and locating Wi-Fi devices. Yang and Gong proposed DeTrack [13], a real-time tracking system. It combined compressed sensing and expectation-maximization algorithms to mitigate the multi-path effect, achieving decimeter level accuracy.
Some schemes focused on improving angle estimation accuracy by extending the antenna array. Kumar et al. proposed Ubicarse [14]. It applied a new formulation of the synthetic aperture radar to emulate large antenna arrays on commercial mobile devices. With the help of emulated antenna arrays, the mobile device could obtain the direction of neighboring APs relative to the device for positioning. Gu et al. proposed TyrLoc [15]. It was an accurate multi-technology switching localization system that estimated the AoA of Wi-Fi, Bluetooth low energy (BLE), and long-range radio (LoRa) device signals for positioning. For improving the accuracy of the AoA estimation, it applied the RF switch to manage antenna switching, creating a large virtual antenna array on PlutoSDR.
Some schemes innovated AoA estimation methods. Karanam et al. achieved high-accuracy AoA estimation by measuring the amplitude of the received signal [16]. Tai et al. proposed unequal AoA tracking (UAT) [17]. It mathematically quantified the reliability of the AoA estimation on each AP and selected those reliable APs for localization. Tong et al. proposed MapFi [18]. It estimated AoA through CSI to obtain the position of APs and the angle of antenna arrays in the positioning system, reducing the labor cost of on-site surveys. Zhang et al. proposed localization framework WiCo [19]. The reliability of AoA estimations from different devices was actually unequal. WiCo utilized a normalized distribution confidence and full reference confidence to quantify this inequality, and resolved it by assigning varying weights to different APs through a re-weighting strategy.
2.2. RSSI
Wi-Fi-assisted schemes based on RSSI can be divided into fingerprint-based schemes and model-based schemes [20], among which fingerprint-based schemes are very popular.
2.2.1. Principle
Fingerprint-based indoor positioning [21] first collects fingerprints exploiting the correlation between RSSI and the physical location in the offline stage to construct a fingerprint database. Then, it compares the real-time measurement value with the signal strength data stored within the fingerprint database to estimate the location of the target in the online stage. It is noteworthy that, among all categories of positioning schemes, except fingerprint-based schemes, others are all based on ranging.
The diagram of fingerprint-based indoor positioning is illustrated in Figure 3:
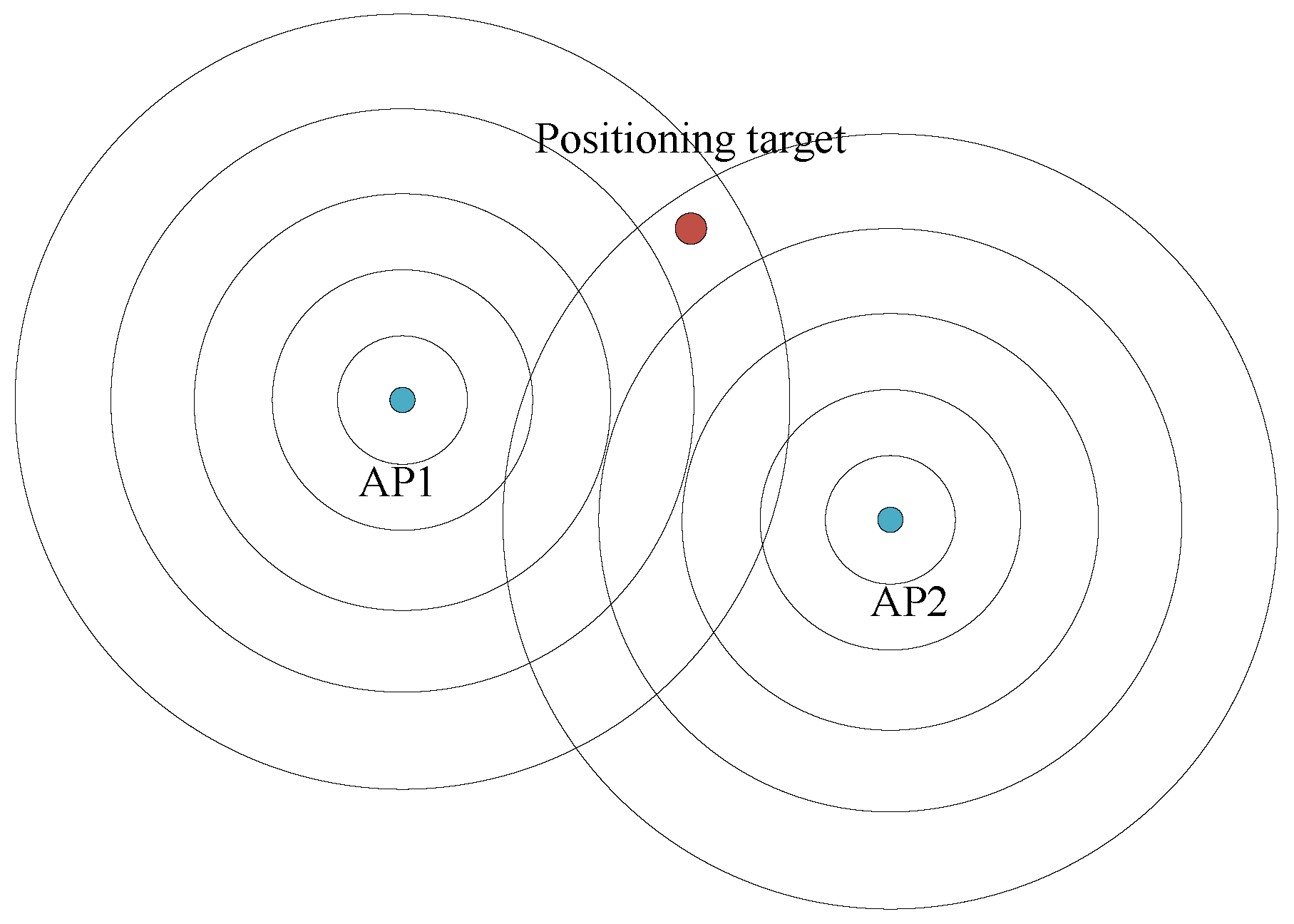
Figure 3. RSSI: fingerprint-based indoor positioning.
Model-based indoor positioning [22] establishes a mathematical model that can predict the distance from the positioning target to the AP according to the signal strength. The distance is used to estimate the position of the positioning target by using trilateration or other methods. Those positioning schemes typically need at least three APs.
The diagram of model-based indoor positioning is illustrated in Figure 4. The logarithmic distance path loss (LDPL) model is expressed as
where 𝑃𝐿(𝑑) denotes the signal strength at distance d from the AP, 𝑑0 denotes the reference distance, and X denotes a noise, e.g., the Gauss distribution. In addition to the LDPL model, there are also other models such as the free space path loss model and the linear distance path loss model [23].
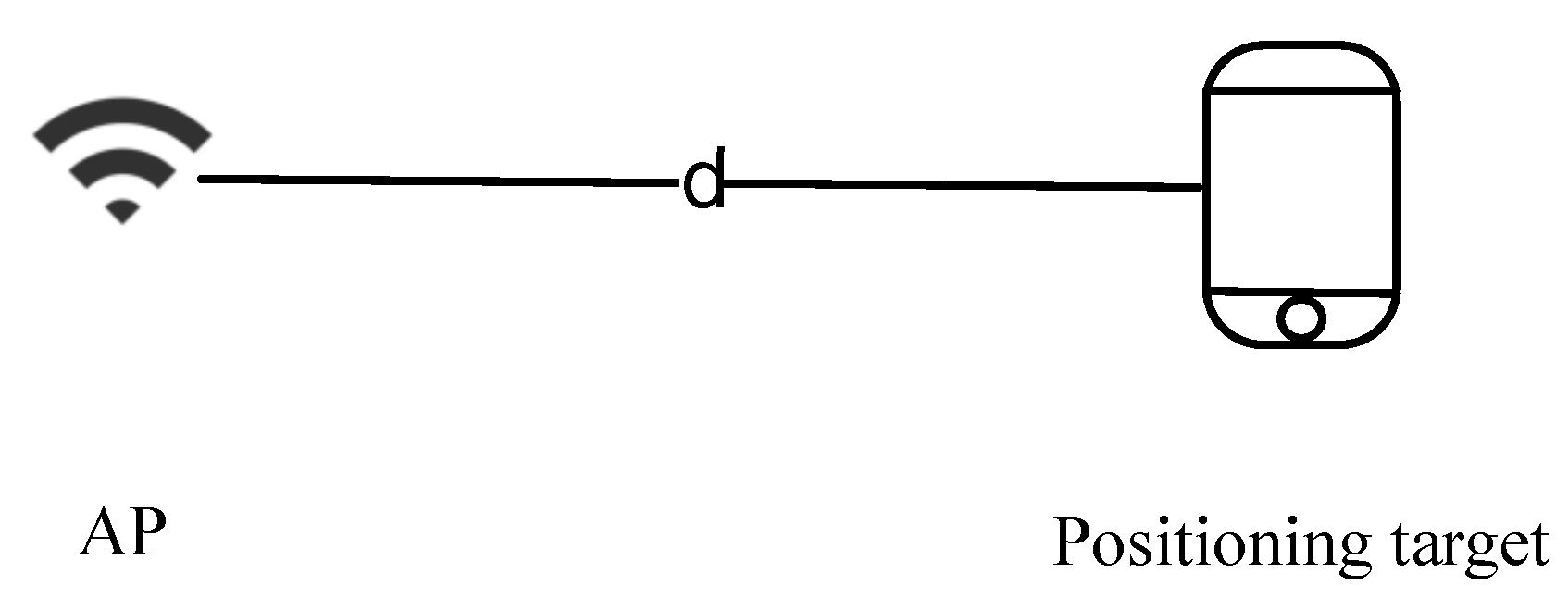
Figure 4. RSSI: model-based indoor positioning.
The advantages of RSSI-based indoor positioning are no need for time synchronization, low hardware requirements, and no additional modification to the AP. In addition, fingerprint-based indoor positioning offers the advantage of theoretical immunity to the multi-path effect, while model-based indoor positioning has the advantages of simple principle, easy implementation, and deployment.
As for the disadvantages, fingerprint-based indoor positioning needs to collect fingerprints at multiple locations in advance, resulting in significant costs. This makes it difficult for fingerprint databases to adapt to environmental changes. Once there are significant environment changes, the fingerprint database may become outdated. It requires collecting fingerprints again. In addition, the movement of the positioning target may cause a Doppler frequency shift, which makes the feature-location relationship unstable. It may result in a significant decrease in the positioning accuracy of fingerprint-based indoor positioning.
The main drawback of model-based indoor positioning is low positioning accuracy. On one hand, the RSSI that can be obtained from commodity hardware is very coarse. On the other hand, the RSSI is greatly affected by the surrounding environment and the changes in the transmit power due to the device itself. The above two reasons result in inaccurate RSSI measurement, thereby reducing the positioning accuracy.
2.2.2. Fingerprint-Based Schemes
Among fingerprint-based schemes, the earliest one was the RADAR [24] proposed by Bahl et al., which had meter-level accuracy. Afterwards, Youssef et al. proposed Horus [25], which was enhanced on the basis of RADAR. It utilized probability technology to estimate the position by a maximum likelihood-based method. Seifeldin et al. proposed a passive positioning system called Nuzzer [26], which consisted of APs and monitoring points (MPs). MPs monitored the strength of the signal sent by APs. Nuzzer constructed the fingerprint database in the offline stage and then used the algorithm based on Bayesian inference to estimate the most likely user location given the signal strength measured by MPs and the constructed fingerprint database.
After 2020, Chen et al. proposed a Wi-Fi passive positioning system FiDo [27]. Users differ in location fingerprints. The system eliminated this difference by locating many different users with labeled data from a few users. Shi et al. developed a precise non-causal positioning system [28]. It utilized building information to prevent illogical phenomena (e.g., sudden jumps) in position estimation. Yang et al. proposed a pyramid-structured fingerprint database fingerprinting pyramid map (FPM) [29]. Users could select fingerprint data with varying levels and densities for positioning, depending on their preferences for accuracy or efficiency in positioning. Tahat et al. investigated the impact of dual frequency information on the performance of fingerprint-based schemes based on different machine learning algorithms [30]. Zhao et al. proposed a lightweight Wi-Fi positioning privacy algorithm called the location preservation algorithm with plausible dummies (LPPD) [31]. It utilized generated reasonable virtual locations to protect the true location of users.
Some fingerprint-based indoor positioning schemes were mixed with other technologies. Yang et al. proposed a factor-maps based positioning system based on UWB and Wi-Fi [32]. Ranging information was provided by UWB, while fingerprint information was provided by Wi-Fi. Wu et al. designed an indoor positioning system consisting of Wi-Fi, geomagnetism, and pedestrian dead-reckoning (PDR) [33]. It first constructed the fingerprint database and the corner reference trajectory-geomagnetic database through PDR trajectories. Then, it applied a Kalman filter-based method to fuse this information for localization. Wu et al. proposed CWIWD-IPS [34], which applied a deep learning framework to fuse crowd-sensed inertial data and Wi-Fi fingerprint samples. Specifically, it first built inertial and Wi-Fi fingerprint databases, then exploited them to train the ResNet-based inertial neural network and the BiLSTM-based Wi-Fi fingerprint neural network. The results from two neural networks were fused by a Kalman filter for localization. Wang et al. proposed a hierarchical positioning scheme that integrated Wi-Fi, magnetic matching (MM), and PDR [35]. The scheme applied an adaptive extended Kalman filter to fuse PDR and positioning results from Wi-Fi and MM.
Some schemes used the CSI fingerprint rather than the RSSI fingerprint. Because the former contains richer and more robust wireless signal information, e.g., amplitude and phase responses of channels over different frequencies. Regani et al. proposed a room/zone-level positioning scheme based on Wi-Fi [36]. The scheme was device-free and calibration-free. It extracted features that indicated motion and breathing patterns from CSI to locate a person. Ayyalasomayajula et al. proposed DLoc [37], a wireless localization algorithm based on deep learning. It trained a neural network using ToF and AoA obtained from CSI. The neural network learned the relationship between signals and truth locations to build an environment model for positioning. Guo et al. put forward a federated TL framework FedPos for CSI fingerprint-based indoor positioning scheme [38]. It aggregated the non-classification layer parameters of models trained from different environments to build a versatile encoder. The encoder constructed personalized models for users, solving problems of privacy leakage and personalized training.
Some work analyzed the performance indicators of fingerprint-based indoor positioning. Krumm proposed pre-deployment and post-deployment models to estimate the accuracy of fingerprint-based schemes [39]. The pre-deployment model considered the possible impact of signal noise, signal quantization, spatial quantization, and calibration efforts on accuracy. The post-deployment model modeled the deployed positioning system to predict the accuracy of it. Mendoza Silva et al. described a method for performing a local-level analysis of the fingerprint-based scheme’s positioning errors [40]. This analysis investigated the accuracy of the positioning system at specific positions (e.g., corners) in the area it covered.
To improve the performance of fingerprint-based indoor positioning or reduce the cost of constructing and maintaining the positioning system, there are two main optimization directions for fingerprint-based indoor positioning schemes, namely fingerprint database construction and updating, and fingerprint matching algorithms.
2.2.3. Fingerprint Database Constructing and Updating
For fingerprint database construction, Rizk et al. proposed LiPhi++ [41]. It greatly reduced data collection costs by utilizing the sensing capabilities of the transportable laser range scanner (LRS). Li et al. discussed a challenge in Wi-Fi fingerprint-based indoor positioning [42], which was how to sample a sufficient number of RSSI measurements in the offline stage. To this end, they proposed Kullback–Leibler divergence (KLD) to characterize the difference between the real distribution and the sampling distribution. Quezada-Gaibor et al. proposed a data cleaning algorithm based on the correlation among all samples in the fingerprint database [43]. The correlation among samples was calculated by the correlation between the RSSI fingerprint and AP’s identifier. Fingerprints with lower correlation would be removed to reduce the storage of the database.
Some schemes used the crowd-sourcing strategy for fingerprint database construction. Yang et al. proposed locating in fingerprint space (LiFS) [21]. In the offline stage, it utilized mobile phones carried by users to collect RSSI fingerprints and to record user movement path by measuring walking steps through an accelerometer. Thereby, it inferred the spatial relationship of RSSI fingerprints and constructed the fingerprint database. Rai et al. proposed Zee [20]. It collected fingerprints in the same way as LiFS. Specifically, it relied on indoor map and inertial sensors in the phone to infer the location and construct the fingerprint database during the offline stage.
Some schemes created virtual fingerprints to reduce database construction costs. The MonoFi proposed by Fahmy et al. first applied the k-nearest neighbor (KNN) regression model to generate virtual RSSI fingerprints at non-surveyed points in the space [44]. Then, it utilized the recurrent neural network (RNN) to learn user positions from temporal sequences of RSSI measurements generated by the fingerprint. Caso et al. proposed using the multi-wall multi-floor (MWMF) model in the empirical propagation model to generate virtual fingerprints during the offline stage [45]. Yong et al. proposed a new fingerprint database construction technology based on the synthetic minority over-sampling technique (SMOTE) [46]. It was applied to generate synthetic fingerprints in areas that were difficult to reach or were not regularly visited. Wei et al. proposed an effective fingerprint crowd-sourcing scheme [47]. In the offline stage, the system collected RSSI measurement data on the known path that users chose before. In the online stage, the system estimated the position based on Gaussian processes.
Some schemes used the clustering strategy to select fingerprints. Liu et al. proposed a weighted k-nearest neighbor (WKNN) positioning strategy using the k-means clustering fingerprint database [48]. The strategy reduced the impact of the RSSI fluctuation and maintained a balance between positioning accuracy and computational complexity. Sadhukhan et al. proposed a new weighted fusion-based efficient clustering strategy (WF-ECS) to fuse the similar fingerprint measured on the reference point (RP) belonging to the same cluster [49]. Ramires et al. proposed a clustering model called the strongest AP set (SAS) [50]. It utilized the concept that the strongest APs indicated the user’s region, clustering fingerprints based on the fixed size set of APs. The strongest AP set of a fingerprint refers to the set of a fixed number of APs with the strongest signal strength measured at the fingerprint’s location. In other words, APs in the set had stronger RSSI values than other APs at the position of the fingerprint.
For fingerprint database updating, Ren et al. proposed the ACOGAN model [51]. The model utilized a remeasured part of the fingerprints to update the whole fingerprint database. Tian et al. proposed a new unsupervised domain adaptation model TransLoc for Wi-Fi fingerprint updating [52]. It transferred location knowledge from the initial fingerprint database to the current unlabeled fingerprint for low-cost Wi-Fi fingerprints automatic updating.
2.2.4. Fingerprint Matching Algorithms
In the direction of fingerprint matching algorithms, to address the environment change, Li et al. proposed the passive positioning system DAFI [53]. It developed a deep learning model for fingerprint matching by training the model with labeled CSI data from the original environment and unlabelled CSI data from the changed environment so that the positioning system could adapt to the changing environment. Song et al. applied deep domain adaptation (DDA) in transfer learning (TL) to the fingerprint matching algorithm model, enabling the model to continuously update by the changing RSSI data [54]. This strategy enhanced the model’s adaptability to the environment change.
Some schemes optimized fingerprint matching algorithms by selecting specific APs. Saccomano et al. proposed a deep learning-based indoor positioning scheme [55]. It first utilized signal strength to generate rankings of APs associated with a fingerprint, then exploited an RNN to learn the relationship between rankings and fingerprint locations for positioning. Zhou et al. proposed a positioning scheme which utilized AP contributions to positioning accuracy as the weight of the KNN fingerprint matching algorithm [56]. The AP contributions were calculated by signal distributions on every RP. Hou et al. proposed the fingerprint localization system FCLoc [57]. It applied a robustness principle to filter out the noise in RSSI samples and selected reliable APs for positioning according to the stability of online RSSI data. Yao et al. proposed an AP optimization integration model consisting of a Gaussian mixture model (GMM) region classifier and a random forest feature learner [58]. The model identified the best AP in the large-scale and complex environment to improve positioning accuracy.
2.2.5. Model-Based Schemes
Due to the complexity of indoor signal propagation, it was challenging to apply model-based indoor positioning schemes indoors. The model-based active positioning system EZ proposed by Chintalapudi et al. was an early classic scheme [22]. It utilized the LDPL model to model the physical constraints of wireless propagation and used the genetic algorithm to solve them.
After 2020, Yang et al. proposed to fuse the internal state information of the system measured by the electronic compass and LDPL through an extended Kalman filtering algorithm [59]. They achieved the optimal pose estimation and path tracking of mobile robots. Hyder et al. proposed using the RSSI smoothing technique of weighted moving average and feedback filters to make RSSI measurements more accurate, which improved distance estimation accuracy of RSSI distance model [60]. Lin et al. proposed the ranging model GTBPD. It was constructed by training a back propagation neural network through the transformed RSSI. The ranging model was combined with the linear least-squares algorithm and the sequential quadratic programming (SQP) algorithm for location determination [61]. Choi proposed a scheme that combined Wi-Fi and sensors for ranging and localization [62]. The Wi-Fi ranging model was constructed by training a convolutional neural network (CNN) with CSI. Wang et al. proposed a cooperative positioning and mapping algorithm based on the max-product belief propagation and Kuhn–Munkres algorithm [63]. It solved the problem of mapping wireless devices to known three-dimensional (3D) installation points by utilizing the probabilistic graphical model and RSSI among devices.
2.3. Time
Time-based indoor positioning schemes can be further divided into time-of-arrival (ToA) based schemes [64] and time-different-of-arrival (TDoA) based schemes [65]. In addition, ToF ranging [3] is often employed for measuring the distance between the positioning target and the AP in ToA-based schemes. It is also utilized in some schemes to measure the distance between each antenna of the AP and the positioning target. Then, the measured distance is used in the method similar to the trilateration for positioning.
Precise time measurement needs high synchronization among devices and wide channel bandwidth, which Wi-Fi lacks. However, the introduction of the FTM protocol improves the accuracy of the time measurement.
2.3.1. Principle
ToA-based indoor positioning requires at least three APs and strict time synchronization between the positioning target and each AP. It measures the arrival time of the received signal between different APs and the positioning target. The time is converted into distance, which is then employed into trilateration to calculate the target’s position.
The time measurement process is illustrated in Figure 5. Specifically, let t denote the arrival time of the signal between the positioning target and the AP. It is determined by four time points. They are 𝑡1, 𝑡2, 𝑡3, and 𝑡4 in chronological order. Under the premise of time synchronization between the AP and the positioning target, t can be obtained from the following expression:
where 𝑡1 and 𝑡2 denote the time points that the positioning target sends the signal and the AP receives it, while 𝑡3 and 𝑡4 denote the time points that the AP sends the signal and the positioning target receives it. Through t obtained from Equation (3), the distance between the AP and the positioning target can be calculated.
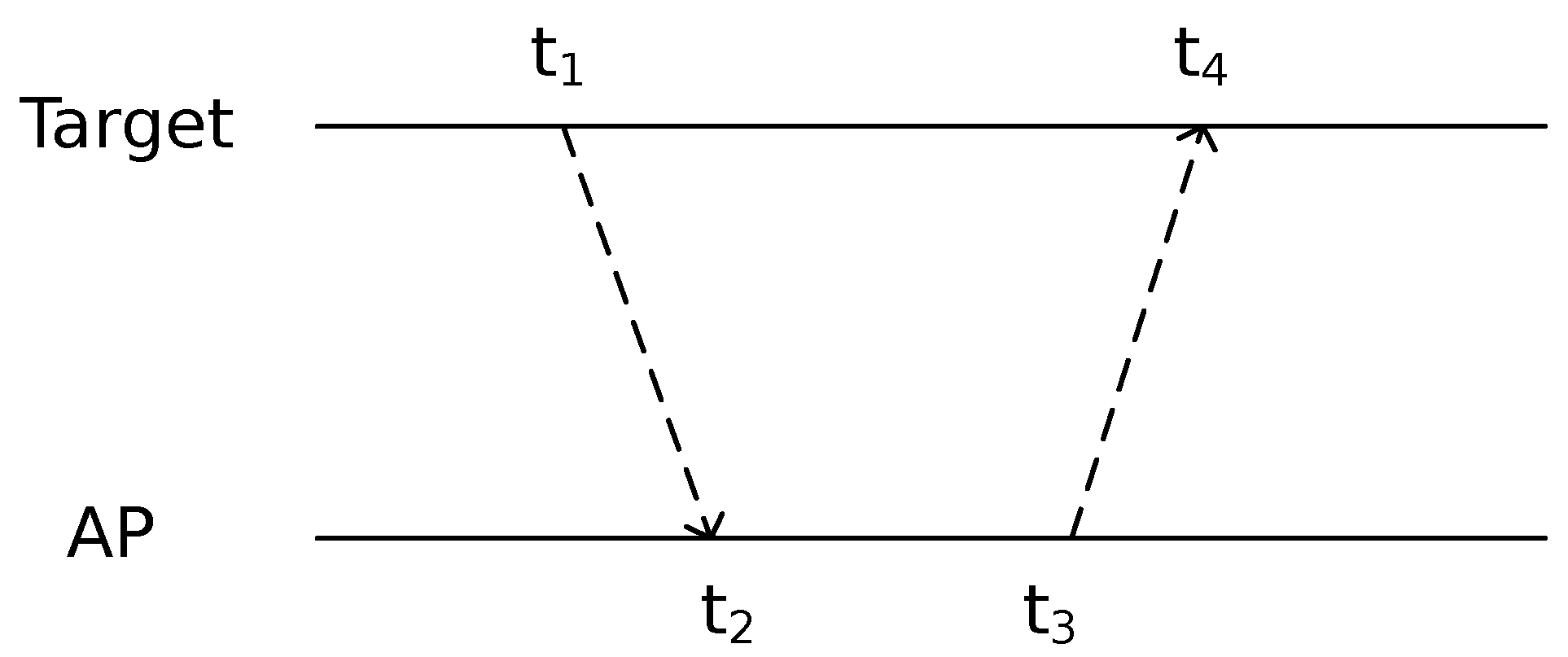
Figure 5. Time measurement.
The benefit of ToA-based indoor positioning lies in its simpler ranging process and easier development compared with TDoA-based indoor positioning. However, it has a drawback where the positioning target needs to achieve ranging with at least three APs in each positioning process. Each ranging requires multiple communications between the AP and the positioning target, which leads to higher energy consumption and greater vulnerability to interference. Additionally, the positioning target needs to handle signal transmission and reception, which causes higher hardware cost than TDoA-based indoor positioning.
The diagram of ToA-based indoor positioning is illustrated in Figure 6:

Figure 6. ToA-based indoor positioning.
TDoA-based indoor positioning requires at least three APs. It first measures the time differences in the arrival of signals from positioning target to multiple APs for distance difference estimation between each AP and the target. Then, it uses the hyperbolic positioning method to locate.
The advantage of TDoA-based indoor positioning lies in its reduced time synchronization requirement compared to ToA-based indoor positioning. It only requires strict synchronization among APs. Furthermore, it can achieve positioning with just one signal transmission from the target, resulting in lower energy consumption compared to ToA-based indoor positioning. The disadvantage is that the algorithm is more complex than ToA-based indoor positioning.
The diagram of TDoA-based indoor positioning is illustrated in Figure 7:

Figure 7. TDoA-based indoor positioning.
Finally, time-based indoor positioning suffers from the multi-path effect. In addition, they all have the drawback that minor time errors may lead to significant distance errors, given the fact that wireless signals travel at the speed of light. However, the narrow channel bandwidth of Wi-Fi is not enough to provide sufficient temporal resolution [65][66]. So it is hard to achieve high positioning accuracy. Fortunately, the Wi-Fi standard is continually evolving, introducing wider channel bandwidths. The latest Wi-Fi 7 has a 6 GHz frequency band, which supports 160 MHz channel bandwidth. It is expected to improve time measurement accuracy.
2.3.2. Traditional Schemes
Xiong et al. proposed a TDoA-based indoor positioning scheme ToneTrack [65], which innovated in time measurement. By utilizing channel hopping in the continuous Wi-Fi frequency band, it combined the signal information from multiple frequency bands for more accurate time measurement. Vasisht et al. proposed Chronos based on ToF [66], which was the first to achieved decimeter level positioning with a single AP. Specifically, it used ToF to obtain the distance from each antenna on the AP to the positioning target for localization. To achieve accurate ToF estimation, it synchronized the AP and positioning target, letting them hop between the multiple frequency bands scattered around 2.4 GHz and 5 GHz. Rea et al. proposed TWINS [67], which was a ToA-based wireless indoor navigation system in industrial environments. It applied GMM to separate the direct path between the AP and the positioning target from the multi-path, measured the distance of the direct path through ToF, and estimated the position using the least squares method.
After 2020, Wang et al. proposed UbiTrack for locating single antenna internet-of-things (IoT) devices [68]. The UbiTrack system utilized ToF obtained from CSI to measure the distance between IoT devices. After that, the distance was leveraged by a new probability positioning algorithm based on the Bayesian estimation to determine the relative position of each device. Suraweera et al. developed a localization system that included multiple asynchronous sniffers [69]. Each sniffer listened to signals transmitted by the positioning target to measure the CSI and multi-path TDoA of it. This information was applied to two algorithms for localization. One algorithm employed a batch processing approach to jointly estimate the target path and the sniffers locations. Another algorithm employed particle filtering to track the target.
2.3.3. FTM-Based Schemes
In 2016, the FTM protocol was introduced in Wi-Fi [6]. It enabled precise round-trip time (RTT) based ranging between the transmitter and receiver of Wi-Fi. Researchers proposed many Wi-Fi FTM-based indoor positioning schemes.
Cao et al. proposed a 3D indoor positioning algorithm for smartphones [70]. The distance measured by Wi-Fi FTM was first leveraged to the weighted centroid (WC) algorithm to estimate the rough two-dimensional (2D) position. Then, the result of WC was applied in the standard particle swarm optimization (SPSO) algorithm combined with density-based spatial clustering of applications with noise (DBSCAN) algorithm to obtain the accurate 3D position. Chan et al. proposed a scheme that used the neural network to predict the location of APs that support the FTM protocol [71]. It used a neural network trained with collected FTM data and a known AP position to identify non-line-of-sight (NLOS) paths of the signal and locate other APs. Ma et al. quantified the detailed Wi-Fi RTT ranging performance under various working modes and environments [64]. They proposed a new system bias elimination process to improve positioning accuracy. Si et al. proposed a weighted indoor positioning scheme based on Wi-Fi FTM suitable for NLOS environments [72]. It utilized compensation models to reduce ranging errors caused by clock drift and multi-path effect.
Some Wi-Fi FTM-based schemes were mixed with other technologies. Wang et al. implemented an indoor positioning scheme that integrated PDR and Wi-Fi FTM ranging using the extended Kalman filter framework [73]. Sun et al. proposed a new Wi-Fi FTM-based scheme assisted by geomagnetic positioning (GP) [74]. Chan et al. proposed an indoor positioning scheme that combined Wi-Fi FTM and PDR [75]. The Wi-Fi FTM data were exploited to estimate the location of the FTM responder infrastructure and train ranging models, while PDR inferred user positions and calibrated Wi-Fi FTM data.
References
- Enge, P.; Misra, P. Special Issue on Global Positioning System. Proc. IEEE Inst. Electr. Electron. Eng. 1999, 87, 3–15.
- Fathi Alshweihdi, A.; Abduljalil Alamrouni, E.; Mohamed Elkawafi, S.; Mohammed Osama Elzwaie, A.; Abdulnabi Shamata, H.; Najem Alfergani, A.; Younis, A. Location Prediction in Mobile Cellular Networks: Machine Learning Approach. In Proceedings of the 7th International Conference on Engineering & MIS 2021 (ICEMIS’21), Almaty, Kazakhstan, 11–13 October 2021; pp. 1–5.
- Chen, Z.; Zhu, G.; Wang, S.; Xu, Y.; Xiong, J.; Zhao, J.; Luo, J.; Wang, X. M3M3: Multipath Assisted Wi-Fi Localization with a Single Access Point. IEEE Trans. Mob. Comput. 2019, 20, 588–602.
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI’13), Lombard, IL, USA, 2–5 April 2013; pp. 71–84.
- Klepeis, N.E.; Nelson, W.C.; Ott, W.R.; Robinson, J.P.; Tsang, A.M.; Switzer, P.; Behar, J.V.; Hern, S.C.; Engelmann, W.H. The National Human Activity Pattern Survey (NHAPS): A resource for assessing exposure to environmental pollutants. J. Exp. Sci. Environ. Epidemiol. 2001, 11, 231–252.
- IEEE Std 802.11-2016 (Revision of IEEE Std 802.11-2012); IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE Standards Association: Piscataway, NJ, USA, 2016; pp. 1–3534.
- Sen, S.; Lee, J.; Kim, K.H.; Congdon, P. Avoiding multipath to revive inbuilding WiFi localization. In Proceedings of the 11th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys’13), Taipei, Taiwan, 25–28 June 2013; pp. 249–262.
- Chen, Z.; Li, Z.; Zhang, X.; Zhu, G.; Xu, Y.; Xiong, J.; Wang, X. AWL: Turning spatial aliasing from foe to friend for accurate WiFi localization. In Proceedings of the 13th International Conference on Emerging Networking EXperiments and Technologies (CoNEXT’17), Ncheon, Republic of Korea, 12–15 December 2017; pp. 238–250.
- Soltanaghaei, E.; Dongare, A.; Prabhakara, A.; Kumar, S.; Rowe, A.; Whitehouse, K. Tagfi: Locating ultra-low power wifi tags using unmodified wifi infrastructure. IMWUT 2021, 5, 1–29.
- Wang, H.; Luan, H. Toward Reliable Localization with a Single Unaided Receiver by AoA. In Proceedings of the 2022 IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Belfast, UK, 14–17 June 2022; pp. 319–324.
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280.
- Zhang, C.; Li, F.; Luo, J.; He, Y. iLocScan: Harnessing multipath for simultaneous indoor source localization and space scanning. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems (SenSys’14), Memphis, TN, USA, 3–6 November 2014; pp. 91–104.
- Yang, Z.; Gong, W. Decimeter-Level WiFi Tracking in Real-Time. In Proceedings of the 2020 IEEE/ACM 28th International Symposium on Quality of Service (IWQoS), Hangzhou, China, 15–17 June 2020; pp. 1–10.
- Kumar, S.; Gil, S.; Katabi, D.; Rus, D. Accurate indoor localization with zero start-up cost. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (MobiCom’14), Maui, HI, USA, 7–11 September 2014; pp. 483–494.
- Gu, Z.; He, T.; Yin, J.; Xu, Y.; Wu, J. TyrLoc: A low-cost multi-technology MIMO localization system with a single RF chain. In Proceedings of the 19th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys’21), Virtual Event, 24 June–2 July 2021; pp. 228–240.
- Karanam, C.R.; Korany, B.; Mostofi, Y. Magnitude-based angle-of-arrival estimation, localization, and target tracking. In Proceedings of the 2018 17th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN’18), Porto, Portugal, 11–13 April 2018; pp. 254–265.
- Tai, T.C.; Lin, K.C.J.; Tseng, Y.C. Toward reliable localization by unequal AoA tracking. In Proceedings of the 17th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys’19), Seoul, Republic of Korea, 17–21 June 2019; pp. 444–456.
- Tong, X.; Wang, H.; Liu, X.; Qu, W. MapFi: Autonomous mapping of Wi-Fi infrastructure for indoor localization. IEEE Trans. Mob. Comput. 2021, 22, 1566–1580.
- Zhang, T.; Zhang, D.; Yang, S.; Sun, Q.; Chen, Y. WiCo: Robust Indoor Localization via Spectrum Confidence Estimation. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, Scotland, 26–29 March 2023; pp. 1–6.
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking (MobiCom’12), Istanbul, Turkey, 22–26 August 2012; pp. 293–304.
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space: Wireless indoor localization with little human intervention. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking (MobiCom’12), Istanbul, Turkey, 22–26 August 2012; pp. 269–280.
- Chintalapudi, K.; Padmanabha Iyer, A.; Padmanabhan, V.N. Indoor localization without the pain. In Proceedings of the Sixteenth Annual International Conference on Mobile Computing and Networking (MobiCom’10), Chicago, IL, USA, 20–24 September 2010; pp. 173–184.
- Katircioğlu, O.; Isel, H.; Ceylan, O.; Taraktas, F.; Yagci, H.B. Comparing ray tracing, free space path loss and logarithmic distance path loss models in success of indoor localization with RSSI. In Proceedings of the 2011 19thTelecommunications Forum (TELFOR), Belgrade, Serbia, 22–24 November 2011; pp. 313–316.
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services (MobiSys’05), Seattle, WA, USA, 6–8 June 2005; pp. 205–218.
- Seifeldin, M.; Saeed, A.; Kosba, A.E.; El-Keyi, A.; Youssef, M. Nuzzer: A large-scale device-free passive localization system for wireless environments. IEEE Trans. Mob. Comput. 2012, 12, 1321–1334.
- Chen, X.; Li, H.; Zhou, C.; Liu, X.; Wu, D.; Dudek, G. Fido: Ubiquitous fine-grained wifi-based localization for unlabelled users via domain adaptation. In Proceedings of the Web Conference 2020 (WWW’20), Taipei, Taiwan, 20–24 April 2020; pp. 23–33.
- Shi, L.; Moayeri, N.; Li, C. On the use of lookahead to improve Wi-Fi fingerprinting indoor localization accuracy. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2021), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8.
- Yang, J.; Wu, L.; Wang, S.; Zhang, B.; Li, Y.; Yang, H.; Shi, Y.; Jiang, J. Pyramid Indoor Localization System Using Dual-Band Wi-Fi Sensors. IEEE Sens. J. 2022, 22, 15508–15516.
- Tahat, A.; Awwad, R.; Baydoun, N.; Al-Nabih, S.; A. Edwan, T. An Empirical Evaluation of Machine Learning Algorithms for Indoor Localization using Dual-Band WiFi. In Proceedings of the 2021 2nd European Symposium on Software Engineering (ESSE 2021), Larissa, Greece, 6–8 November 2021; pp. 106–111.
- Zhao, P.; Liu, W.; Zhang, G.; Li, Z.; Wang, L. Preserving Privacy in WiFi Localization With Plausible Dummy Locations. IEEE Trans. Veh. Technol. 2020, 69, 11909–11925.
- Yang, L.; Wu, N.; Li, B.; Yuan, W.; Hanzo, L. Indoor Localization Based on Factor Graphs: A Unified Framework. IEEE Internet Things J. 2022, 10, 4353–4366.
- Wu, Y.; Chen, R.; Li, W.; Yu, Y.; Zhou, H.; Yan, K. Indoor positioning based on walking-surveyed Wi-Fi fingerprint and corner reference trajectory-geomagnetic database. IEEE Sens. J. 2021, 21, 18964–18977.
- Wu, Y.; Chen, R.; Fu, W.; Li, W.; Zhou, H. CWIWD-IPS: A Crowdsensing/Walk-surveying Inertial/Wi-Fi Data-driven Indoor Positioning System. IEEE Internet Things J. 2023, 10, 8786–8798.
- Wang, Z.; Yang, Z.; Wang, Z. An Adaptive Indoor Positioning Method Using Multisource Information Fusion Combing Wi-Fi/MM/PDR. IEEE Sens. J. 2022, 22, 6010–6018.
- Regani, S.D.; Hu, Y.; Wang, B.; Liu, K.R. Wifi-based robust indoor localization for daily activity monitoring. In Proceedings of the 1st ACM Workshop on Mobile and Wireless Sensing for Smart Healthcare (MWSSH’22), Sydney, NSW, Australia, 21 October 2022; pp. 1–6.
- Ayyalasomayajula, R.; Arun, A.; Wu, C.; Sharma, S.; Sethi, A.R.; Vasisht, D.; Bharadia, D. Deep learning based wireless localization for indoor navigation. In Proceedings of the 26th Annual International Conference on Mobile Computing and Networking (MobiCom’20), London, UK, 21–25 September 2020; pp. 1–14.
- Guo, J.; Ho, I.W.H.; Hou, Y.; Li, Z. FedPos: A Federated Transfer Learning Framework for CSI-Based Wi-Fi Indoor Positioning. IEEE Syst. J. 2023, 17, 4579–4590.
- Krumm, J. Location Accuracy Estimates for Signal Fingerprinting. In Proceedings of the 28th International Conference on Advances in Geographic Information Systems (ACM SIGSPATIAL 2020), Seattle, WA, USA, 3–6 November 2020; pp. 560–567.
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. Local-level Analysis of Positioning Errors in Wi-Fi Fingerprinting. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5.
- Rizk, H.; Yamaguchi, H.; Youssef, M.; Higashino, T. Laser range scanners for enabling zero-overhead wifi-based indoor localization system. ACM Trans. Spat. Algorithms Syst. 2023, 9, 1–25.
- Li, X.; Li, X.; Yang, Z. A theoretical analysis based on kullback-leibler divergence in sampling size for wifi fingerprint-based localization. In Proceedings of the 2021 9th International Conference on Communications and Broadband Networking (ICCBN 2021), Shanghai, China, 25–27 February 2021; pp. 244–249.
- Quezada-Gaibor, D.; Klus, L.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J.; Granell, C.; Huerta, J. Data Cleansing for Indoor Positioning Wi-Fi Fingerprinting Datasets. In Proceedings of the 2022 23rd IEEE International Conference on Mobile Data Management (MDM), Paphos, Cyprus, 6–9 June 2022; pp. 349–354.
- Fahmy, I.; Ayman, S.; Rizk, H.; Youssef, M. Monofi: Efficient indoor localization based on single radio source and minimal fingerprinting. In Proceedings of the 29th International Conference on Advances in Geographic Information Systems (ACM SIGSPATIAL 2021), Beijing, China, 2–5 November 2021; pp. 674–675.
- Caso, G.; De Nardis, L. Virtual and oriented WiFi fingerprinting indoor positioning based on multi-wall multi-floor propagation models. Mob. Netw. Appl. 2017, 22, 825–833.
- Yong, Y.F.; Tan, C.K.; Tan, I.K. SMOTE for Wi-Fi Fingerprint Construction in Indoor Positioning Systems. In Proceedings of the 2021 IEEE International Performance, Computing, and Communications Conference (IPCCC), Austin, TX, USA, 29–31 October 2021; pp. 1–6.
- Wei, Y.; Zheng, R. Efficient Wi-Fi fingerprint crowdsourcing for indoor localization. IEEE Sens. J. 2021, 22, 5055–5062.
- Siyang, L.; de Lacerda, R.; Fiorina, J. WKNN indoor Wi-Fi localization method using k-means clustering based radio mapping. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5.
- Sadhukhan, P.; Dahal, K.; Das, P.K. A Novel Weighted Fusion based Efficient Clustering for Improved Wi-Fi Fingerprint Indoor Positioning. IEEE Trans. Wirel. Commun. 2022, 22, 4461–4474.
- Ramires, M.; Torres-Sospedra, J.; Moreira, A. Accurate and Efficient Wi-Fi Fingerprinting-Based Indoor Positioning in Large Areas. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK and Beijing, China, 26–29 September 2022; pp. 1–6.
- Ren, X.; Tao, W.; Own, C.M. RSS Remeasurement Estimation for Indoor Positioning System with Generative Adversarial Network Model. In Proceedings of the 2021 2nd International Conference on Computing, Networks and Internet of Things (CNIOT2021), Beijing, China, 20–22 May 2021; pp. 1–8.
- Tian, Y.; Wang, J.; Zhao, Z. Wi-Fi Fingerprint Update for Indoor Localization via Domain Adaptation. In Proceedings of the 2021 IEEE 27th International Conference on Parallel and Distributed Systems (ICPADS 2021), Beijing, China, 14–16 December 2021; pp. 835–842.
- Li, H.; Chen, X.; Wang, J.; Wu, D.; Liu, X. DAFI: WiFi-based device-free indoor localization via domain adaptation. IMWUT 2021, 5, 1–21.
- Song, Y.; Guo, X. An Adaptive and Robust Model for WiFi-based Localization. In Proceedings of the ACM Turing Celebration Conference-China (ACM TURC’20), Hefei, China, 22–24 May 2020; pp. 107–111.
- Saccomanno, N.; Brunello, A.; Montanari, A. Let’s forget about exact signal strength: Indoor positioning based on access point ranking and recurrent neural networks. In Proceedings of the 17th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services (EAI MobiQuitous 2020), Virtual, 7–9 December 2020; pp. 215–224.
- Zhou, M.; Li, Y.; Tahir, M.J.; Geng, X.; Wang, Y.; He, W. Integrated statistical test of signal distributions and access point contributions for Wi-Fi indoor localization. IEEE Trans. Veh. Technol. 2021, 70, 5057–5070.
- Hou, C.; Xie, Y.; Zhang, Z. FCLoc: A Novel Indoor Wi-Fi Fingerprints Localization Approach to Enhance Robustness and Positioning Accuracy. IEEE Sens. J. 2022, 23, 7153–7167.
- Yao, Z.; Wu, H.; Chen, Y. Enhanced Wi-Fi indoor positioning real application based on access points optimization ensemble model. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC 2022), Hefei, China, 21–23 May 2022; pp. 2183–2188.
- Guihua, Y.; Weiwei, T.; Zhiyi, L. Research on Path Tracking Control of Indoor Robot Based on RSSI. In Proceedings of the 2020 2nd International Conference on Big Data and Artificial Intelligence (ISBDAI’20), Johannesburg, South Africa, 28–30 April 2020; pp. 336–340.
- Hyder, Z.; He, D.; Li, D.; Yu, W. Improved Wi-Fi Indoor Localization Based on Signal Quality Parameters and RSSI Smoothing Algorithm. In Proceedings of the 2021 10th International Conference on Information and Automation for Sustainability (ICIAfS’21), Colomob, Sri Lanka, 11–13 August 2021; pp. 140–144.
- Lin, Y.; Yu, K.; Hao, L.; Wang, J.; Bu, J. An indoor wi-fi localization algorithm using ranging model constructed with transformed rssi and bp neural network. IEEE Trans. Commun. 2022, 70, 2163–2177.
- Choi, J. Sensor-aided learning for Wi-Fi positioning with beacon channel state information. IEEE Trans. Wirel. Commun. 2022, 21, 5251–5264.
- Wang, Y.; Li, S.; Ni, W.; Zhao, M.; Jamalipour, A.; Wu, B. Cooperative Three-Dimensional Position Mapping Based on Received Signal Strength Measurements: Algorithm Design and Field Test. IEEE Trans. Veh. Technol. 2021, 70, 10541–10552.
- Ma, C.; Wu, B.; Poslad, S.; Selviah, D.R. Wi-Fi RTT ranging performance characterization and positioning system design. IEEE Trans. Mob. Comput. 2020, 21, 740–756.
- Xiong, J.; Sundaresan, K.; Jamieson, K. Tonetrack: Leveraging frequency-agile radios for time-based indoor wireless localization. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom’15), Paris, France, 7–11 September 2015; pp. 537–549.
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI 16), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178.
- Rea, M.; Cordobés, H.; Giustiniano, D. Time-of-flight wireless indoor navigation system for industrial environment. In Proceedings of the 13th International Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization (WiNTECH’19), Los Cabos, Mexico, 25 October 2019; pp. 37–44.
- Wang, W.; Liu, Z.; Gao, J.; Saoda, N.; Campbell, B. UbiTrack: Enabling scalable & low-cost device localization with onboard wifi. In Proceedings of the 8th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation (BuildSys’21), Coimbra, Portugal, 17–18 November 2021; pp. 11–20.
- Suraweera, N.; Li, S.; Johnson, M.; Collings, I.B.; Hanly, S.V.; Ni, W.; Hedley, M. Environment-Assisted Passive WiFi Tracking With Self-Localizing Asynchronous Sniffers. IEEE Syst. J. 2020, 14, 4798–4809.
- Cao, H.; Wang, Y.; Bi, J. Smartphones: 3D indoor localization using Wi-Fi RTT. IEEE Commun. Lett. 2020, 25, 1201–1205.
- Chan, H.W.; Alexander, I.; Lai, C.; Wu, R.B. Transfer learning of Wi-Fi FTM responder positioning with NLOS identification. In Proceedings of the 2021 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNeT 2021), San Diego, CA, USA, 17–22 January 2021; pp. 23–26.
- Si, M.; Wang, Y.; Seow, C.K.; Cao, H.; Liu, H.; Huang, L. An adaptive weighted Wi-Fi FTM-based positioning method in an NLOS environment. IEEE Sens. J. 2021, 22, 472–480.
- Wang, L.; Cai, X.; Cheng, L.; Han, K.; Han, H.; Ma, L. Experimentations and Analysis on Indoor Positioning through Fusion with Inertial Sensors and Dynamically Calibrated Wi-Fi FTM Ranging. In Proceedings of the 2021 IEEE Sensors, Virtual Conference, 31 October–4 November 2021; pp. 1–4.
- Sun, M.; Wang, Y.; Huang, L.; Jia, H.; Bi, J.; Joseph, W.; Plets, D. Geomagnetic positioning-aided Wi-Fi FTM localization algorithm for NLOS environments. IEEE Commun. Lett. 2022, 26, 1022–1026.
- Chan, H.W.; Wu, P.Y.; Alexander, I.; Lai, C.; Wu, R.B. Fusion-Based Smartphone Positioning Using Unsupervised Calibration of Crowdsourced Wi-Fi FTM. IEEE Access 2022, 10, 96260–96272.
More
Information
Subjects:
Computer Science, Information Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
970
Revisions:
2 times
(View History)
Update Date:
07 Oct 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No