The use of unmanned aerial vehicles (UAVs) in search and rescue (SAR) can greatly enhance the task success rates in reaching inaccessible or dangerous areas, performing challenging operations, and providing real-time monitoring and modeling of the situation.
1. Introduction
The development of unmanned aerial vehicles (UAVs), also known as drones, has led to a significant improvement in the efficiency of search and rescue (SAR) operations. The successful implementation of drones in numerous disaster relief efforts has demonstrated their effectiveness in performing tasks that were previously difficult or impossible for humans to accomplish. The primary goal of search and rescue missions is to locate the target as quickly as possible and take necessary follow-up actions, such as the exchange of information and delivery of supplies, within a limited timeframe. The use of drones for SAR operations has several advantages, including their ease of deployment, low maintenance cost, high mobility, and ability to hover in areas where the use of manpower may be dangerous, limited, or require quick decisions.
Traditional data analysis methods often require manual supervision, which may limit the real-time processing and efficient utilization of data collected by unmanned aerial vehicles (UAVs). With the continuous advancement of UAV technology, including automated flight, high-precision sensors, and machine learning algorithms, large amounts of data, such as images, videos, sounds, etc., can be collected by UAVs within a short timeframe
[1]. These data have tremendous potential in assisting search personnel in locating victims or assessing disaster situations more quickly in search and rescue (SAR) tasks. An assisting unmanned aerial system facilitated a rescue operation in the Bieszczady Mountains in Poland
[2]. The rescue team used convolutional neural networks to automatically locate individuals in aerial images, processing a total of 782 images. After 4 h and 31 min of analysis, the system successfully detected the missing person and provided the coordinates.
The full utilization of UAV data could be greatly facilitated by the development of unsupervised data analysis methods. Automation algorithms and machine learning techniques can enhance the autonomy of UAVs, enabling them to automatically identify and calibrate targets, perform target classification and tracking, and even make real-time decisions and take action. Through the application of such unsupervised data analysis methods, the reliance on manual supervision and intervention can be reduced, leading to lower risks of human errors and subjective judgments, while improving the objectivity and consistency of data analysis. This is particularly crucial in tasks such as SAR that demand high levels of timeliness and accuracy.
2. Classification and Design of UAVs for SAR Operations
2.1. Classification of UAVs
According to the difference in structure design, the classification of UAVs could be divided into different categories
[3]. Among all the classifications, corresponding advantages and deficiencies are stated. In the most general way, the UAV could be distinguished as a fixed-wing UAV, multirotor UAV, and unmanned helicopter. The integration of the propeller design and fixed-wing design leads to the hybrid UAV type, which could be specified as an independent classification and could provide aerodynamic advantages (i.e., the fixed wing is integrated with the multi-rotor UAV, providing flight efficiency while granting the ability to perform vertical take-off and landing). For different mission requirements, the most appropriate type can be selected according to the characteristics of different UAV designs.
2.1.1. Unmanned Helicopter
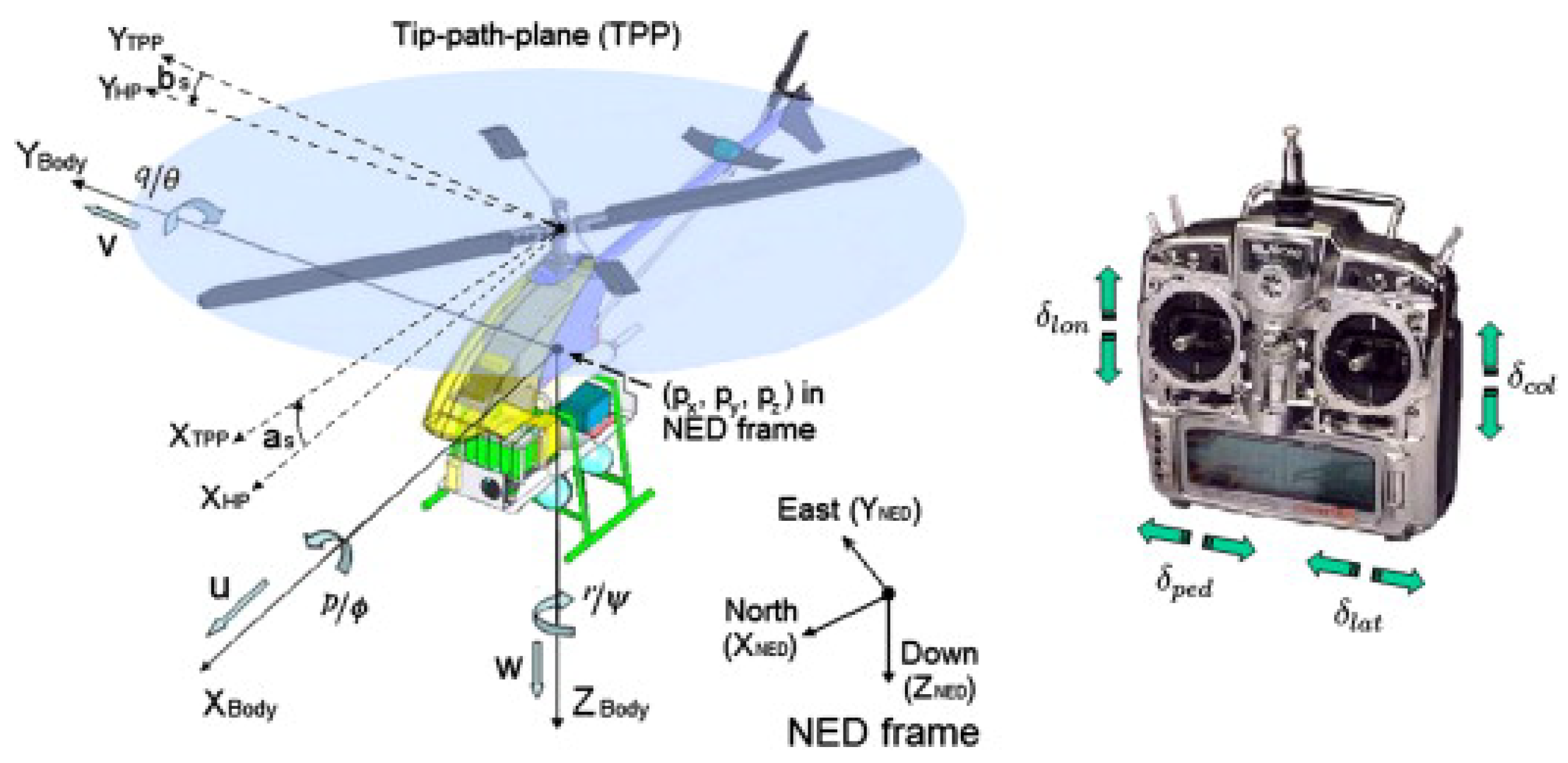
The unmanned helicopter has a motor on the top (main motor) of the fuselage with a large propeller to generate lift and achieve all the movements (i.e., pitch yaw and roll), while also having another motor on the tail with a small propeller to balance the torque generated by the main motor
[4].
Figure 1 presents the schematic diagram of a typical type of unmanned helicopter.
Figure 1. Schematic diagram of unmanned helicopter
[5].
2.1.2. Multirotor UAV
Multirotor UAV is the most commonly seen UAV classification. It utilizes the motors and propellers to generate lift through their high-speed rotation. It could be further divided according to the number of motors, including the most common types: octocopter (eight rotors and propellers), hexacopter (six rotors and propellers), quadcopter (four rotors and propellers), and tricopter (three rotors and propellers).
As
Figure 2 presents, Quadcopter X is used as an example to generally illustrate flight mechanics. Four rotors are installed at the same distance to the gravity center. To balance the torque generated from the motor rotation, the motors on the same diagonal should remain in the same rotating direction, while the rotation direction of the motors on the same side should be different. According to the paper
[6], differential thrust controls the pitch, roll, and yaw movements of the quadcopter. When facing the positive direction of Quadcopter X, the pitch and roll movements are controlled by the differential thrust between front–behind pairs of rotors and left–right pairs of rotors, separately. The yaw movement is controlled by the differential thrust between diagonal pairs of rotors, generating horizontal torque clockwise or counterclockwise.
Figure 2. Figure of Quadcopter X
[7].
Simplicity in structure is one of the advantages of multirotor UAVs. A few rotors with propellers and electronic speed controllers (ESC) compose the basic flying frame. To improve flight performance, the multirotor UAV achieves agility moving in a smaller region. The vertical take-off and landing (VTOL) promise normal operation under both outdoor and indoor environments, which is also the reason that it is commonly used in the research area
[7]. Poor endurance is one of the cons. The electricity consumption rate is high, as multiple rotors are driven to lift the aircraft, and the increase in frame weight also raises the consumption rate. With a full battery of 2600 mAh, the endurance of the quadcopter, which weighs 700 g, could only reach about 15–17 min according to our daily experiment. Thus, conflicts exist between the payload and endurance; a heavier battery means higher endurance, but also means a reduced payload that it could bear under specific endurance.
2.1.3. Fixed-Wing UAV
Most fixed-wing UAVs (as
Figure 3 shows) have a similar dynamic mechanism as commercial airplanes, such as the Boeing-747. They utilize the pressure difference between the upper surface and lower surface to generate lift. To achieve this, propulsion is generated (the thrust point is most commonly located in the tail of the fuselage). Pitch, roll, and yaw movements are achieved by the operation of elevators, ailerons, and rudders, respectively. The paper
[8] illustrates the design perspectives of fixed-wing UAVs and analyzes the flight performance, including the design of the fuselage, propeller, airfoil, and winglet. The corresponding aerodynamic performance and stability are also described using computational fluid dynamics (CFD).
Figure 3. Figure of fixed wing UAV
[9].
2.1.4. Hybrid UAV
Combining the advantages of the multirotor UAV and fixed-wing UAV, the hybrid UAV could achieve VTOL function and operate long-range maneuvers
[10]. However, the installation of multiple sets of motors and propellers (as
Figure 4 shows) may introduce more wind resistance and weight during the operation, while the complexity of the control system design is also a challenge.
Figure 4. Figure of hybrid UAV
[11].
2.2. Types of Design for Various Situations
2.2.1. UAV System Design
For UAV systems for SAR operations, many papers present and discuss different system structure designs and solutions for utilizing UAVs in SAR scenarios, including dynamic systems, communication structures, autonomy, performance evaluation, and challenges in path planning and obstacle avoidance.
A UAV system is designed for SAR competition in
[12], in which take-off, landing, control, video processing, and packet-dropping task are performed. The advantage of the project is its achieving avionic performance with a low-cost structure design, but the wireless link and communication are restricted, due to which the performance of the graph processing declined. Compared to this, a fully autonomous UAV solution is proposed in
[13] for assisting SAR under natural disasters, under which the SAR functions of UAVs are discussed, including autonomous path planning, environment perception, and identification of victim groups.
2.2.2. Communication and Deployment
UAV-to-UAV communication plays a critical role in improving the efficiency and adaptability of UAV swarms. It enables the coordination of tasks, the transmission of status information, sharing of sensor data, and collaborative localization among UAVs. UAV swarms can also act as a network of base stations to provide communication services in areas with poor or no wireless network infrastructure. These UAV-swarm base stations can enhance the performance of the network by providing flexibility and adaptability.
2.2.3. Overcoming GNSS Limitations
Global Navigation Satellite System (GNSS) is a technology that provides global positioning and navigation services through satellite systems. It is essential to robot navigation, but the localization to UAV might be restricted under GNSS denial environments. For the discovery of complex circumstances, such as cave environments, the paper
[14] developed an autonomous system utilizing the flying robot for cave environment perception. The system is composed of multiple subsystems to achieve full autonomy of UAVs. The requirements of the UAV are also proposed including operative under lacking sources of light and access to GNSS.
2.2.4. Marine and Offshore Operations
The UAV system could also play an important role in marine and offshore operations, such as assessing fire disasters on offshore oil platforms or rescuing drowning victims
[15]. In
[16], a system is developed for searching castaways by multi-UAVs based on artificial neuronal networks. The system predicts the location range of victims based on the wind and sea currents while keeping track of the discovered victim and finding the rest at the same time. It lays little focus on the UAV charging problem and more information could be considered as clues for searching for victims.
2.2.5. Energy Efficiency during Operation
The energy aspect is essential for the SAR operation of UAVs. Drones are limited by their battery level
[17], which means, in other words, the power supply is inadequate for SAR missions. As the former context illustrates, the factors that affect the energy consumption of a UAV are various, including its maximum speed, operating altitude, devices equipped, and its weight (with payload). To study the energy supply, Ref.
[18] compares different properties of different battery types (including Pb-acid, NiMH, Li-ion, NiCad, etc.) and points out that lithium polymer batteries and lithium-ion batteries are the most common battery types for UAV, which is because of their high energy and power per unit of battery mass. The UAV could also utilize solar energy for charging, which converts light into electric current through the photovoltaic (PV) effect. The relevant research on solar-powered UAVs has been developed recently, including their path planning
[19] and target tracking operations
[20].
2.2.6. Artificial Intelligence (AI) integration
Nowadays, AI brings higher autonomy and adaptability to drones, enabling them to play greater roles in various applications. The applications of AI involve many aspects, including a control system by AI-based throttle and elevator control
[21], autonomous UAV navigation
[22], and learning-based reactive obstacle avoidance maneuver control frameworks
[23]. Multiple applications of UAV communication to different AI algorithms are also discussed in the paper
[24]. The proposed integration provides an efficient system and enhanced quality of service. The following sections will introduce more AI-integrated techniques based on the specific operations.
3. Application of UAVs in SAR
3.1. On-Site Monitoring, Modeling, and Analysis
Among multiple applications, UAVs are utilized as a tool for environment perception, providing video streaming and 3D models of disaster areas for the planning of SAR operations. During catastrophes such as earthquakes and floods, urban areas are extremely dangerous since the breakdown of buildings might be triggered by the aftershock, soaking, or the impact of high-speed floating obstacles, endangering the safety of SAR teams. The amendment information could be obtained by UAV to prevent the rescue team’s injuries and guarantee the rescue operations’ efficiency.
3.1.1. Monitoring and Modeling on Disaster Area
At disaster sites, traditional methods of manual mapping and measurement may be limited in terms of time and accuracy due to the varying degrees and extent of the damage. However, UAVs can use their efficient data collection and processing capabilities to conduct 3D modeling after the disaster, generating accurate digital maps, 3D models, and volume measurements to support rescue efforts.
Early in 2011, the paper
[25] introduced a 3D modeling solution, a low-cost UAV system along with its components, device, and software, to build the 3D point cloud from the digital image. To generate the 3D model based on the image or video stream provided by the UAV camera, the concept of Structure from Motion (SfM)
[26] is introduced in the paper
[27] as a low-cost solution that compensates the camera motion and estimating the 3D model of the object. Based on the SfM, multiple software packages are developed for constructing 3D models based on the point cloud, such as PhotoScan, Pix4D Mapper, MicMac, and MeshLab.
3.1.2. Building Quality Estimation on Disaster Area
The collapse of buildings during rescue contributes to significant difficulties for SAR operations. Therefore, the applications of UAVs in disaster areas also include building inspection, which is used to analyze the possibility of collapse and plan the rescue operation. For example, the paper
[28] developed an image collection system with the post-processing program, which integrates canny mask into edge detecting technique for defect detection. Basic defect-detection operations are achieved in this project.
There also exist multiple defect-detection methods operating on buildings and bridges using UAV photographs, including bridge inspection by videos
[29], building inspection by post-processing photographs
[30], and defect detection using computer vision
[31]. The result of the UAV bridge fatigue detection in
[32] even showed that the best performance is comparable to human inspectors.
Although the result shows the good feasibility of the proposed method, the limitations encountered are various
[33], including high requirements on the camera, the influence of vehicle motion on the image quality, and unsatisfying GPS signal. The paper
[30] found unusable data accounting for a large portion of data acquired, while the realignment and stitching of images are also difficult, which also verified the finding from
[32] that camera specification and illumination requirements are essential to the detection performance. Therefore, to overcome these limitations mentioned above, an optimized path pattern and camera setting are proposed in
[34], for a UAV system operating 3D modeling using the SfM method, and analyzing the damage by inspecting the small cracks on the example building, which is located 8km north of Napa.
Since computer vision and neural networks can provide functions such as feature extraction and image processing, object detection, and recognition, it is extremely useful for drones surveying building conditions. The paper
[35] further introduced speeded-up robust features (SURF)-based feature detection algorithm to achieve the image stitching, while the result showed that image stitching is achieved and the feasibility of UAV inspection on structural damage is verified. Besides the computer vision, The paper
[36] utilized a convolutional neural network to distinguish the collapsed and damaged buildings in seismic disaster areas. A 3D model of the building is formed using GIS information at first, and segmentation processing is utilized to separate each building for detailed analysis with multi-view images. CNN-based damage assessments are operated based on the information provided. The experiment in old Beichuan town showed the prediction accuracy reaches 89.39%.
3.2. Perception and Localization of Targets
Perception and localization of targets are always the most important section when conducting search and rescue operations. Thanks to the high-speed mobility and position advantage, UAVs can be used to quickly survey large areas and identify potential victims, allowing rescue teams to target areas of need quickly and accurately. In the former cases illustrated, UAVs could identify hard-to-reach areas and provide real-time updates on the location and condition of victims. The paper
[37] reported two cases using UAVs achieving the SAR operation, including victim searching in Dry Creek Canyon, Oregon, by a DJI Phantom 4K quadrotor, and Wahclella Falls Trailhead, Oregon, by an SAR Bot, which is equipped with a thermal imager and made by Aerial Technology International. In both missions, the victims were found deceased in an area that the SAR team had difficulty reaching, which also secured the SAR teams and improved efficiencies.
Multiple works of literature focusing on utilizing the advantage of computer vision are introduced, to reduce the involvement of human operators and cut down human factors. Computer vision refers to the field of artificial intelligence that involves enabling computers to interpret and understand visual data from the sensor installed, such as images or videos. The relevant techniques include the integration of histograms of oriented gradients (HOG) detector to camera
[38]. The literature presents the testing result of the HOG detector with other different detectors including the poselet detector, the discriminatively trained part-based models (DPM) detector, and pictorial structures (PS) with the discriminant part detector.
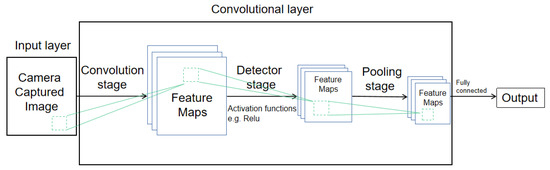
Convolutional Neural Networks (CNNs) are another technique that is commonly used in computer vision tasks, which particularly are designed to automatically learn and extract features from input images, through a series of convolutional layers, pooling layers, and fully connected layers as
Figure 5 describes. In
[39], a trained support vector machine (SVM) classifier and Convolutional Neural Networks (CNN) image representation is used for discovering the victim. Pre-processing procedure in the algorithm finds the area of interest by using a sliding window to identify the color differences in HSV color space. The post-processing procedure improves the decision by hidden Markov models (HMM)
[40]. The proposed detection obtains better accuracy than the traditional HOG classifier.
Figure 5. Illustration of CNN.
In traditional search and rescue operations, rescuers visually scan large areas of interest to locate missing persons or objects. It allows SAR operators to use their human expertise and judgment to identify and locate the target of interest. Among the literature focusing on human–machine interactive SAR operations, multiple sensors, and videos processing techniques are adopted for the SAR operation to improve the searching performance of human operators, including the RGB data selection
[41], temporary localized mosaic view
[42], thermal imagery
[43].
However, when visual scanning is operated by human rescuers, it can be time-consuming and difficult, particularly in remote or mountainous areas. Strategies proposed to mitigate such human factor also includes the inherited limitation from the method itself. The paper
[41] uses the commercial package Loc8 to find the high-contrast color, but the low-contrast color may restrict the performance of the Loc8.
Thermal images provide high-contrast targets for human rescuers, but environmental interference (i.e., object occlusion and temperature increase) and equipment quality will affect the performance of the thermal image. The existing limitations may induce human errors in detecting victims in operation and a decline in efficiency.
The utilization of RGB and thermal cameras are also of great importance to the development of autonomous UAV search and rescue operations.
Thermal camera cues provide high-contrast images between the target and the environment, enabling the target to be explicitly distinguished. However, the intrinsic limitation of thermal cameras requires other sensors to be fused to ensure the robustness of SAR operation. To study the feasibility of thermal cues, the paper
[44] integrates four passive infrared detectors (PIR) sensors and two ultrasonic sensors into the UAV system for the requirements of victim detection and collision avoidance. The communication module installed on the system transmits the GPS output to the base station when PIR sensors detected the targets. To enhance the system searching ability, the paper
[45] fused an infrared camera with an avalanche beacon receiver to discover both snow-covered and uncovered bodies in the avalanche rescue operation.
3.3. Search and Rescue Operation
3.3.1. Task Assignment
Control of UAVs in SAR operations can be carried out manually by expert pilots, but one of the problems is that coordination among pilots is difficult because of the dynamic nature of the environment during a disaster. So the challenging problem of automatic search by multiple drones has received much attention, and it is a non-deterministic polynomial (NP) problem of combinatorial optimization under multiple constraints. The successful and efficient allocation of available resources will be a solver of such a situation, in which rescue efficiency can be maximized. Vehicles should be able to quickly, reliably, and efficiently find answers to the question: considering the resources available in the network and the tasks that should be performed, what is the best allocation of these tasks among us? The key to solving this problem is to establish the task assignment model and use the assignment algorithm.
The current reality is that most of the environments are uncertain, dynamic, and only partially observable, so it is difficult to implement a centralized global optimization algorithm. Individual agents need to independently and possibly myopically decide what to do next based on the information they receive. Various distributed methods have been proposed. One of the most basic algorithms is the opportunistic task allocation Strategy (OTA)
[46], in which an unmanned aircraft randomly selects blocks in an unexplored search area. One way to do this is when information is extremely scarce. There are also some complicated distributed methods, such as market-based methods and consensus algorithms. The key to the market-based approach can be visualized as the auctioneer announcing a bidding task, each agent sending the bid to the auctioneer, and the highest bidder robot winning the task. In a multi-drone SAR operation, the bid value is calculated based on the distance between the drone and the survivor so that the survivor can be rescued in the shortest possible time. However, this method requires a connected topology and a large amount of data transmission to send bids
[47][48].
3.3.2. Path Planning
The path planning problem for a UAV may be viewed as an optimization problem
[49] in which the most common goal is to find a feasible path from the beginning location to the terminal position while following different optimization parameters and constraints. The SAR mission is not always in the open wilderness and may sometimes be in a cluttered and obstacle-rich environment; for example in an urban area or indoor environment, it is necessary for a UAV to adopt a path planning algorithm ensuring the traversed path to be collision-free and optimal in terms of path length. According to the actual situation, there will be some variations. For example, to realize the comprehensive use of UAVs and mobile charging stations, VRP with the synchronous network (VRPSN) is defined in
[50], which is a new kind of VRP.
Many methods for UAV path planning have been proposed in recent years. The most common ones are sampling-based methods, such as RRT and PRobability roadmap; there are graph-based methods for designing paths, such as Voronoi graph algorithm, concluded Dijkstra algorithm, A* algorithm, and Markov decision processes
[51][52]. It is worth mentioning that
[52] integrates target motion prediction with the tracking trajectory planning (as
Figure 6 shows), enabling the advanced path planning utility. Applications in this area have been studied as early as 2011; the paper
[53] preliminarily addresses SAR using quadrotors. The paper
[54] used a hill-climbing algorithm, iteratively, to first find a path at each step by the hill-climbing algorithm, and then optimized the objective function to assign the search effort (flight time) to each cell in the path. The paper
[55] broke two assumptions and extended a framework for probabilistic search based on decision-making to merge multiple observations of grid cells and changes in UAV altitude, enabling small, light, low-speed, and agile UAVs, such as quadrotors, to perform occupancy network-based search tasks.
3.3.3. Collision Avoidance
It is not difficult to find from the above that path planning is to generate a set of path points that bypass obstacles from the initial position to the final goal, while collision avoidance takes a given waypoint assignment as a local goal to avoid obstacles.
Early collision avoidance algorithms mainly targeted static obstacles. Since path planning also needs to be considered in obstacle avoidance, the predominant idea for obstacle avoidance in the 1970s and 1980s is to construct a configuration space, and many improved path-planning algorithms have been proposed. However, none of these classical algorithms can minimize the input energy and achieve the optimum results while avoiding obstacles. In the middle of the 1980s, some path-planning algorithms considering uncertain and dynamic environments were proposed, such as potential functions
[56], control theory, and other heuristic algorithms. These algorithms solve the shortcomings of classical algorithms but still face challenges when dealing with complex moving obstacles.
After the 2000s, with the development of new technology and improved hardware computing power, more and more obstacle avoidance algorithms have been proposed, making UAVs more agile and robust. The paper
[57] describes the safety evaluation process that the international community has deemed necessary to certify such systems about UAVs. The paper
[58] proposes an adaptive tracking controller based on output feedback linearization that compensates for dynamic changes in the quadrotor’s center of gravity. The paper
[59] combines the improved Lyapunov Guidance Vector Field (LGVF), the Interfered Fluid Dynamical System (IFDS), and the strategy of varying receding-horizon optimization from Model Predictive Control (MPC) to track the target and avoid obstacles in a complex dynamic environment.
4. Summary
In conclusion, the use of unmanned aerial vehicles for search and rescue operations is a promising development that has improved the efficiency and effectiveness of SAR missions. The benefits of drones, including ease of deployment, low maintenance cost, high mobility, and sensor integration, make them an attractive option for SAR operations. The continued development of drones and their sensors will optimistically lead to further advancements in the field of SAR, making it possible to save more lives in the event of disasters and emergencies.
 +1 credit
+1 credit