Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Faizan Sana | -- | 1556 | 2023-07-05 19:25:02 | | | |
| 2 | Camila Xu | Meta information modification | 1556 | 2023-07-06 02:57:02 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Sana, F.; Azad, N.L.; Raahemifar, K. Autonomous Vehicle and Adverse Weather Conditions. Encyclopedia. Available online: https://encyclopedia.pub/entry/46478 (accessed on 24 June 2026).
Sana F, Azad NL, Raahemifar K. Autonomous Vehicle and Adverse Weather Conditions. Encyclopedia. Available at: https://encyclopedia.pub/entry/46478. Accessed June 24, 2026.
Sana, Faizan, Nasser L. Azad, Kaamran Raahemifar. "Autonomous Vehicle and Adverse Weather Conditions" Encyclopedia, https://encyclopedia.pub/entry/46478 (accessed June 24, 2026).
Sana, F., Azad, N.L., & Raahemifar, K. (2023, July 05). Autonomous Vehicle and Adverse Weather Conditions. In Encyclopedia. https://encyclopedia.pub/entry/46478
Sana, Faizan, et al. "Autonomous Vehicle and Adverse Weather Conditions." Encyclopedia. Web. 05 July, 2023.
Copy Citation
The development of autonomous vehicles (AVs) is becoming increasingly important as the need for reliable and safe transportation grows. However, in order to achieve level 5 autonomy, it is crucial that such AVs can navigate through complex and unconventional scenarios. It has been observed that currently deployed AVs, like human drivers, struggle the most in cases of adverse weather conditions, unsignalized intersections, crosswalks, roundabouts, and near-accident scenarios.
autonomous vehicles
self-driving cars
unconventional scenarios
1. Introduction
Several organizations, both in academia and industry, are rigorously working towards developing autonomous vehicles (AVs) which have the potential to save thousands of lives every year and create significant societal benefits [1][2]. According to a report by the World Health Organization (WHO), approximately 1.35 million road traffic deaths occur every year with an additional 20–50 million people suffering nonfatal injuries [1]. A study carried out by the National Highway Traffic Safety Administration (NHTSA) in the United States concluded that 94% of accidents occurred due to human errors while only 2% were caused by vehicle failures [3]. Hence, encouragingly, the increased adoption of AVs will likely reduce vehicle accidents and hence decrease the fatalities due to road traffic. If their widespread deployment is successful, the projected annual social benefits of AVs—which include reducing traffic congestion and the number of accidents on the road, consuming less energy, and boosting productivity as a result of reallocating driving time—will reach nearly $800 billion by 2050 [4].
2. Adverse Weather Conditions
Continuously changing weather phenomena have several negative impacts on traffic and transportation. On average, global precipitation occurs 11% of the time although only 8% occurs on land [5]. Based on the study conducted in [6] which used information from fatal crashes spanning the US over a 6-year period, the authors concluded that the risk of fatal crashes increased by 34% during active precipitation while the risk was the highest during the winter months. In terms of their classification of heavy precipitation, they found that the risk increased by over 140%. Such adverse weather phenomena include rain, snow, fog, wind, and extreme heat and cold. Since such weather conditions affect the perception stack of autonomous vehicles, most studies such as [7][8][9] are concerned with improving the sensor fusion algorithms in which data from multiple sensors, for instance, radar, LiDAR, RGB, event-based cameras, etc., are fused to get the most accurate localization and identification of the surrounding objects. Therefore, most surveys on adverse weather conditions [10][11][12][13] focus on improving the shortcomings in the perception stack and the relevant hardware, discussing the various sensors’ weaknesses. Although identifying the weather condition is crucial and hence there is an abundance of research in the perception domain, it is also important that AV controllers take into consideration these changes since they affect the friction coefficient of the road. These changes negatively afflict the ego vehicle directly because they create abnormalities in the vehicle states. These changes also affect the surrounding vehicle’s behavior and hence the environment dynamics itself. According to [14], for braking distances of vehicles traveling at 80 km/h, the friction coefficient for dry roads is 0.7 while that of rainy, snowy, and icy roads is 0.4, 0.28, and 0.18, respectively. These data along with the collision data demonstrate that the behavior of AVs need to adapt to these changes in road conditions.
A motion planning algorithm was developed in [15] that took into consideration vehicles with a limited receptive field, which usually occurs during adverse weather conditions. The algorithm used a probabilistic model to estimate the likelihood of obstacles being present in the unobserved areas of the environment, incorporating that information into the motion planning algorithm for generating safe and efficient trajectories. The planner itself was based on finite state machines (FSM). The planner was tested in a closed-loop simulation environment developed by the authors and deployed on their automated vehicle, BERTHAONE [16]. It was shown that the planner imitated human behavior and drove with reduced speeds in shorter sensor ranges, preparing to yield to approaching not yet observable vehicles, while being aware of any erratic behaviors in other vehicles. However, they only tested their algorithm in an environment consisting of other vehicles and made several assumptions, such as all other vehicles obeyed the speed limit and the false negative object detection rate was zero for a specific range amongst others. Additionally, due to the nature of the FSM algorithm, complex maneuvers such as lane changes were not allowed since that would have caused the required FSM logic to exponentially grow. In [17], the authors developed an adaptive path planning model for collision avoidance and lane change maneuvers for curved sections of highways. The lane change model took into account the curvature of the road, the road friction coefficient, and the presence of other vehicles. They utilized a Gaussian distribution to evaluate the impact of rain on vehicle lateral dynamics. To track and execute the control signal, they used a model predictive control (MPC) approach which incorporated the effects of rain and ensured the generated trajectory was followed. The proposed algorithm was tested in a self-developed simulation environment and shown to successfully change lanes in rain. However, this algorithm was specifically tested on highways, only at curved sections, and it only outputted the lateral control of the vehicle.
In [18], a linear MPC-based stability control system was proposed for low-friction roads. The authors developed a controller for both the longitudinal and lateral controls and demonstrated that their controller worked well even without knowing the value of the friction coefficient. They also developed an instability detection algorithm which was used to determine the vehicle stability threshold while estimating the friction coefficient. The algorithm was tested in a Carsim/Matlab cosimulation environment and compared with a baseline MPC for only tracking the desired path and speeds. Similarly, in [19], the authors proposed a steering control tracking strategy for roads with different tire–road friction coefficients. To estimate the friction coefficient, they developed a long short-term memory (LSTM) network which consisted of four LSTM layers and two fully connected (FC) layers. They evaluated their algorithm in a Carsim-Simulink simulation environment and demonstrated that the tracking accuracy improved by 37.7% with an adaptive tire cornering stiffness estimation strategy. However, since they were only focusing on the tracking, the algorithm only outputted the steering angle. In [20], the effects of sudden snowstorm conditions on AV dynamics were discussed, along with the controller performance on the same map. An MPC controller was used for trajectory tracking with the maximum speed set to 35 km/h. The authors showed that the average positioning error using the mean squared error (MSE) formulation in snow was 22% higher than in nonsnow conditions, particularly due to wheel slippage. As a result, the vehicle was still able to navigate autonomously. They concluded that the robustness of the positioning strategy was key to the performance of the motion controller, indicating the importance of a robust positioning strategy. However, that study was only limited to smaller-sized vehicles since they were using a heavy quadricycle, the Renault Twizy, and further analysis of vehicle dynamics was needed to be performed for larger-size vehicle applications, such as autonomous buses and trucks.
In [21], an adaptive online tuning strategy for lateral controllers was introduced, particularly the Stanley controller, to improve the performance of lateral trajectory tracking systems. This is shown in Figure 1. The authors used a modified version of the Stanley control law, originally used in [22], which essentially incorporated the vehicle kinematics as well as partial inclusions of the vehicle dynamics effects (tires and steering wheel). They used a fuzzy inference algorithm to update the controller gains online to keep the cross-tracking errors (CTEs) as low as possible. The updated gains were the CTE and heading gains of the Stanley controller.
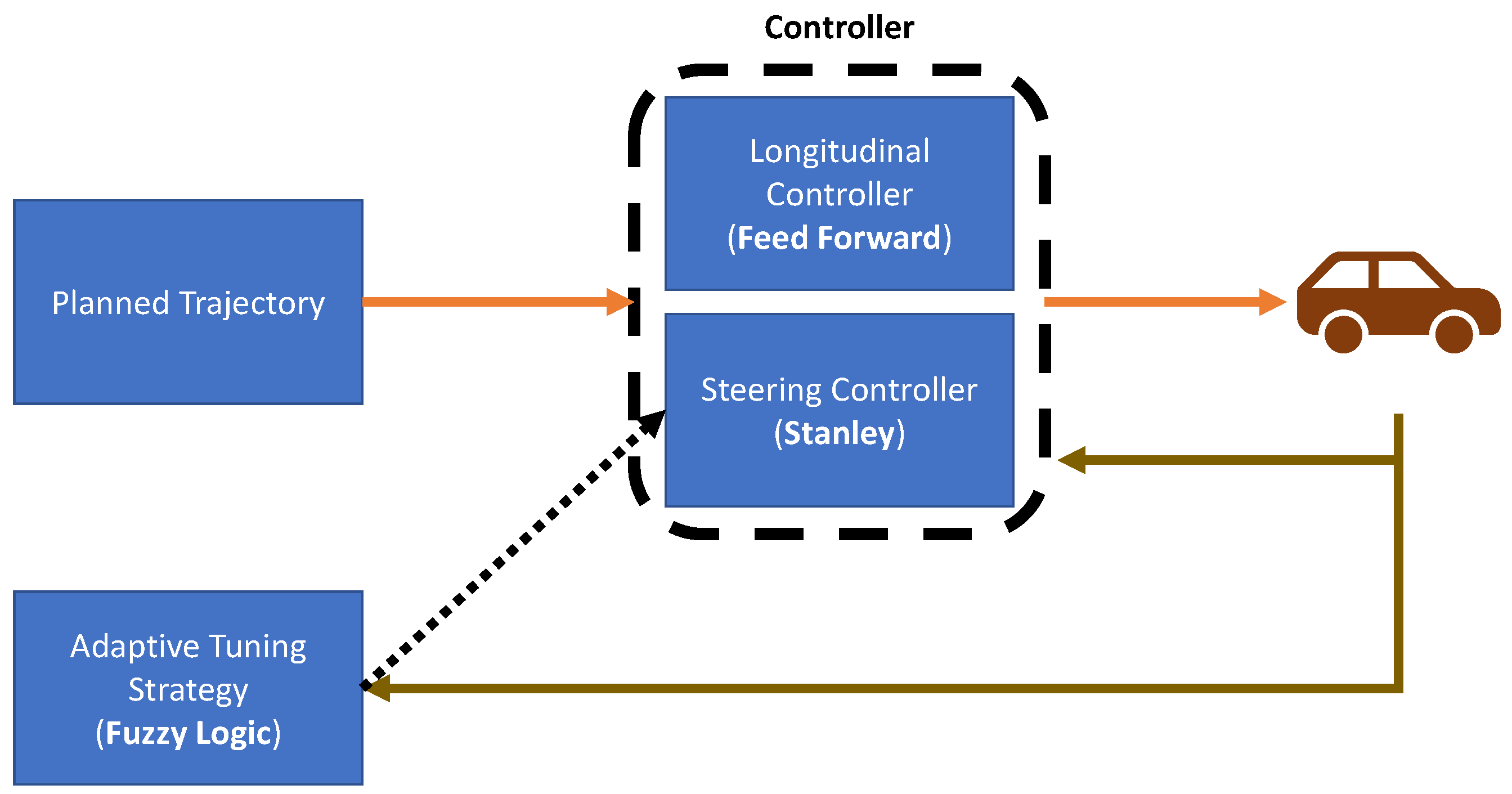
Figure 1. Motion control framework used in [21].
Furthermore, to replicate driverlike behavior, they proposed a set of rules for adjusting the gains based on a heuristic understanding of how the controller gains affected the steering angle. Experiments were conducted by randomly initializing the controller gains and monitoring the performance of an adaptation strategy by using CTEs as the performance metric. Experiments were carried out in a confined environment and the desired trajectory of the vehicle was recorded and then used for testing. However, since there were no obstacles, no local path planning was performed. Additionally, the average speed of the vehicle was 15 km/h which did not truly represent urban driving. There were also no experiments performed on slippery roads which would change the coefficient of friction. Compared to traditional lane-keeping systems (LKS), which are typically based on a camera, in [23], an LKS was presented using a global navigation satellite system (GNSS) along with high-definition (HD) maps to overcome the effects of the surrounding environment, including weather and lighting. They also developed an MPC-based controller to calculate the steering angle based on cubic approximations of the position of the vehicle using the GNSS and HD map outputs. In a previous study [24], they had used a PID controller but found that there was significant oscillation in the steering signal. To assess the proposed technique, they used a simulation environment developed in Matlab/Simulink with conditions suitable for highway driving. They also verified the controller performance using a Mitsubishi Outlander with a real-time kinematic OxtS GNSS RT3003. Although the controller model was able to track the steering angle, they did not evaluate it in various weather conditions. Additionally, it was seen that the time delay of the GNSS severely affected the performance and was a crucial factor for the MPC controller.
References
- World Health Organization. Global Status Report on Road Safety 2018; Technical Report; World Health Organization: Geneva, Switzerland, 2018.
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181.
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Technical Report; National Highway Traffic Safety Administration: Washington, DC, USA, 2018.
- Montgomery, W.D.; Mudge, R.; Groshen, E.L.; Helper, S.; MacDuffie, J.P.; Carson, C. America’s Workforce and the Self-Driving Future: Realizing Productivity Gains and Spurring Economic Growth. 2018. Available online: https://trid.trb.org/view/1516782 (accessed on 8 November 2022).
- Trenberth, K.E.; Zhang, Y. How often does it really rain? Bull. Am. Meteorol. Soc. 2018, 99, 289–298.
- Stevens, S.E.; Schreck, C.J.; Saha, S.; Bell, J.E.; Kunkel, K.E. Precipitation and fatal motor vehicle crashes: Continental analysis with high-resolution radar data. Bull. Am. Meteorol. Soc. 2019, 100, 1453–1461.
- Arthi, V.; Murugeswari, R.; Nagaraj, P. Object Detection of Autonomous Vehicles under Adverse Weather Conditions. In Proceedings of the 2022 International Conference on Data Science, Agents & Artificial Intelligence (ICDSAAI), Chennai, India, 8–10 December 2022; Volume 1, pp. 1–8.
- Azam, S.; Munir, F.; Jeon, M. Channel boosting feature ensemble for radar-based object detection. In Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, 11–17 July 2021; pp. 762–769.
- Li, Y.J.; Park, J.; O’Toole, M.; Kitani, K. Modality-agnostic learning for radar-lidar fusion in vehicle detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 918–927.
- Zhang, Y.; Carballo, A.; Yang, H.; Takeda, K. Perception and sensing for autonomous vehicles under adverse weather conditions: A survey. ISPRS J. Photogramm. Remote Sens. 2023, 196, 146–177.
- Zang, S.; Ding, M.; Smith, D.; Tyler, P.; Rakotoarivelo, T.; Kaafar, M.A. The impact of adverse weather conditions on autonomous vehicles: How rain, snow, fog, and hail affect the performance of a self-driving car. IEEE Veh. Technol. Mag. 2019, 14, 103–111.
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An overview of autonomous vehicles sensors and their vulnerability to weather conditions. Sensors 2021, 21, 5397.
- Yoneda, K.; Suganuma, N.; Yanase, R.; Aldibaja, M. Automated driving recognition technologies for adverse weather conditions. IATSS Res. 2019, 43, 253–262.
- Kordani, A.A.; Rahmani, O.; Nasiri, A.S.A.; Boroomandrad, S.M. Effect of adverse weather conditions on vehicle braking distance of highways. Civ. Eng. J. 2018, 4, 46–57.
- Taş, Ö.Ş.; Stiller, C. Limited visibility and uncertainty aware motion planning for automated driving. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1171–1178.
- Taş, Ö.Ş.; Salscheider, N.O.; Poggenhans, F.; Wirges, S.; Bandera, C.; Zofka, M.R.; Strauss, T.; Zöllner, J.M.; Stiller, C. Making bertha cooperate–team annieway’s entry to the 2016 grand cooperative driving challenge. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1262–1276.
- Peng, T.; Su, L.l.; Guan, Z.w.; Hou, H.j.; Li, J.k.; Liu, X.l.; Tong, Y.k. Lane-change model and tracking control for autonomous vehicles on curved highway sections in rainy weather. J. Adv. Transp. 2020, 2020, 8838878.
- Joa, E.; Hyun, Y.; Park, K.; Kim, J.; Yi, K. Model Predictive Control based Stability Control of Autonomous Vehicles on Low Friction Road. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 419–424.
- He, S.; Xu, X.; Xie, J.; Wang, F.; Liu, Z. Adaptive control of dual-motor autonomous steering system for intelligent vehicles via Bi-LSTM and fuzzy methods. Control Eng. Pract. 2023, 130, 105362.
- Hamid, U.Z.A.; Kyyhkynen, A.; Peralta-Cabezas, J.L.; Saarinen, J.; Santamala, H. All-Weather Autonomous Vehicle: Performance Analysis of an Automated Heavy Quadricycle in Non-Snow and Snowstorm Conditions using Single Map In The IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks; Springer: Cham, Switzerland, 2019; pp. 1100–1106.
- Samokhin, S.; Mehndiratta, M.; Hamid, U.Z.A.; Saarinen, J. Adaptive Fuzzy Tuning Framework for Autonomous Vehicles: An Experimental Case Study. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5.
- Hoffmann, G.M.; Tomlin, C.J.; Montemerlo, M.; Thrun, S. Autonomous automobile trajectory tracking for off-road driving: Controller design, experimental validation and racing. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 2296–2301.
- Tominaga, K.; Takeuchi, Y.; Tomoki, U.; Kameoka, S.; Kitano, H.; Quirynen, R.; Berntorp, K.; Cairano, S. GNSS Based Lane Keeping Assist System via Model Predictive Control; Technical Report; SAE Technical Paper; SAE: Warrendale, PA, USA, 2019.
- Takeuchi, Y.; Hideyuki, T.; Kazuo, H.; Tomoki, U. Development of Autonomous Driving System Using GNSS and High Definition Map; Technical Report; SAE Technical Paper; SAE: Warrendale, PA, USA, 2018.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
981
Revisions:
2 times
(View History)
Update Date:
06 Jul 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No