 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Jesus Felez | -- | 3909 | 2023-05-24 07:26:17 | | | |
| 2 | Fanny Huang | -1463 word(s) | 2446 | 2023-05-29 05:09:16 | | |
Video Upload Options
The mobility situation is constantly changing as people are increasingly moving to urban areas. Therefore, a flexible mode of transport with high-capacity passenger trains and a high degree of modularity in the trains’ composition is necessary. Virtual coupling (VC) is a promising solution to this problem because it significantly increases the capacity of a line and provides a more flexible mode of operation than conventional signaling systems.
1. Introduction
The current mobility situation is constantly changing as people are increasingly moving to urban areas. Meanwhile, people living in city centers and metropolitan areas tend not to use cars; thus, there is an increasing demand for efficient, modern, punctual, and environmentally sustainable transportation.
This growth in the demand for rail transport was reported in [1]. According to this report, which describes the increase in the number of passengers (in short scale billions) per kilometer traveled for the countries of the European Union (EU) between 2010 and 2019, the number of passengers per kilometer has increased by 17.6% in the EU (EU-27), from 358.3 to 421.4 billion passengers per kilometer.
This increased demand can be met by increasing the number of lines or the capacity of the existing lines. Construction of new lines was the first solution to be proposed. However, this has not been the general policy of all countries and is often expensive. Therefore, the second solution is to increase the capacity of existing railway lines. In this context, given that demand for rail transport is heterogeneous and varies both between and within lines, depending on the time of day and time of year, a flexible mode of transport with high-capacity passenger trains and a high degree of modularity in their composition, wherein the railway operator can vary the configuration of trains according to the expected passenger demand, is necessary.
As a solution to these problems, the railway sector has focused its efforts on increasing the capacity and flexibility of lines by improving the current railway operation. Research has focused on increasing capacity by reducing the headway or the distance between trains. Moreover, railway traffic control and signaling systems based on moving-block systems (MBSs) have been developed, such as the Communication-Based Train Control (CBTC) system [2], which is mainly used in urban and Automated People Mover (APM) railway lines, and the European Rail Traffic Management System (ERTMS L3) [3] for main and commuter lines.
Additionally, the coupling of train units to form consists has been proposed for enhancing the average passenger train speed, energy efficiency, and capacity utilization of railway infrastructure, among other aspects. The capability of dynamic coupling and uncoupling of train units at cruise speeds was suggested. Two operating concepts can be realized via dynamic coupling [4][5]: dynamic mechanical coupling to mechanically change the composition of the consists at the cruising speed, and virtual coupling (VC) to virtually change the composition of the consists at the cruising speed via communication. In the previous first approach [6], vehicle movements are managed using distance control and vehicle-to-vehicle communication during the approach. Here, a safe active impact absorption system is necessary when the two units move together to form a consist. In this situation, the units are stabilized, held, and guided during the coupling and uncoupling process.
The previous second approach is based on the use of VC to virtually change the compositions of the consists at the cruising speed via communication. Thus, VC is a train-centric next generation signaling system that enables multiple trains to operate in a formation just like one train or decouple separately, either on-the-run or at station, flexibly or as planned. VC is an evolution of the current MBSs, similar to the way in which road vehicles operate, where vehicles run at a safe distance from the vehicle in front and the driver reacts to the brake lights of the vehicle in front, and this safe distance is far shorter than the braking distance required for a complete stop, as considered in current MBSs.
Clearly, more trains can run on the line if the spacing between trains is reduced. Thus, the line capacity is increased. In [7], a multi-state train-following model was developed for describing VC procedures conduct a comparative capacity analysis with other signaling systems. The results indicated that VC has a superior capacity to MBSs, and it was estimated that VC could reduce the distance between trains by 64% for European Train Control System (ETCS) Level 2 and by 43% for ETCS Level 3.
Consequently, in addition to increasing the capacity of the line, VC can provide a more flexible mode of operation, with trains behaving as if they are physically coupled. This makes it possible to run trains in smaller sets but adapt to the circumstances. As reported in [8][9], this functionality is particularly relevant at turnouts and stations, where VC can be canceled before approaching the station and trains can stop at different platforms at the same station, allowing the entire convoy to disembark. After stopping, trains can either recouple or continue as two separate convoys to different destinations.
2. Railway Virtual Coupling System Concept

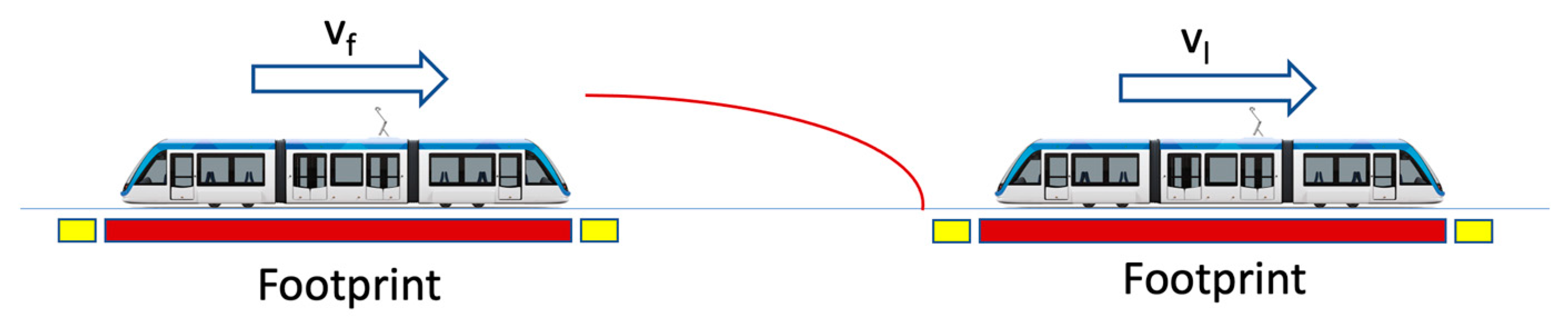
There are two modes of train operation control in the MBS [10][11]: the Absolute Distance Braking Mode (ADBM) and the Relative Distance Braking Mode (RDBM). These two control modes have different efficiencies and risks.

The ADBM is applied in CBTC [2] and in ERTMS Level 3 [3]. However, its conservative character results in trains tending to run far apart.
In order to realize dynamic train coupling, position and speed information must be reliably exchanged between trains [12]. New communication technologies offer this ability of direct communications between vehicles with high rate and low latency.
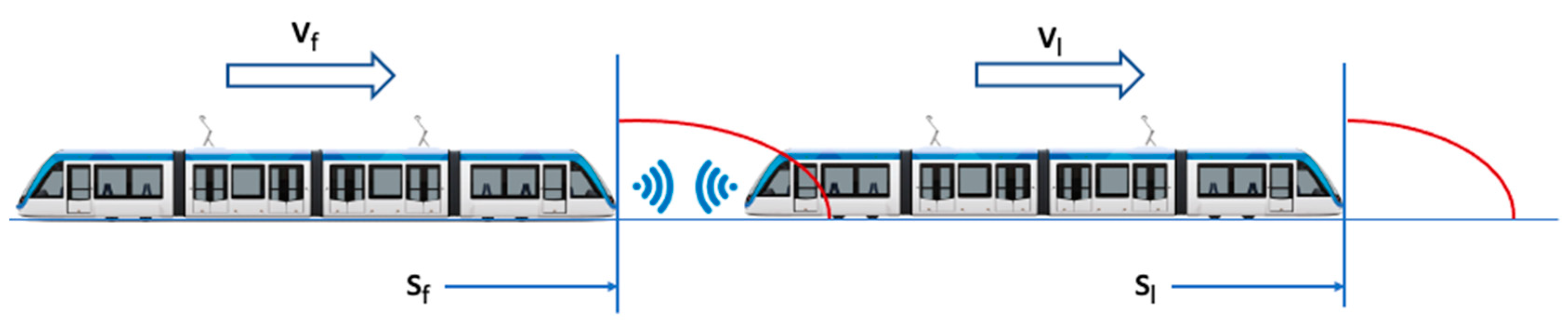
The relative-braking model is closely related to collaborative operations. The VCTS uses train-to-train (T2T) communication for sharing information between the intra-VCTS consists and receiving the reference signals from the infrastructure. According to this information, the onboard system is responsible for the safe tracking of the speed profiles, and it should also respect the spacing policy between trains and allow the follower to safely follow the lead train.
The VCTS requires sensors to know at all times the relative distance to and velocity of the preceding consist. It also requires a communication link between consists for them to exchange information such as their positions, velocities, and accelerations. Following the approach described above, functional requirements must be derived for the sensors and communication systems of the VCTS. Sensors are needed to determine the absolute position, relative position (or distance) between trains, relative and absolute velocities, and acceleration. Regarding communication, it is necessary to define how often this information must be exchanged between trains, as well as the type of information and the amount of data.
The Institution of Railway Signal Engineers (IRSE) provided in its white paper [13] a preliminary analysis of the concept of virtual coupling, which involved an assessment of weather it is technically feasible and safe. It also noticed that virtual coupling would bring real benefits such as increased line capacity and greater flexibility in railway operation.
3. Virtual Coupling System Evolution and Development
The concept of virtual train operation was first introduced in [14][15], where the authors presented an operating railway concept that represents a middle ground between current road and rail traffic in which the wagons are not physically coupled and each wagon has its own driving and control system.
The first VC concepts appeared in 1999 and these concepts were consolidated until 2006. However, their freight-oriented approach and the limitations of existing technology at that time may have prevented them from reaching their potential. Only when the European Research Initiative Shift2Rail [16] appeared, it received a new impulse, mainly motivated by the need to increase the capacity of passenger rail lines in mass transit and by advances in communication technology.
Both the EU, initially through Shift2Rail [17] and currently through Europe’s Rail Joint Undertaking [18], and various Chinese research programs such as the National Key R&D Program of China [19] and the National Natural Science Foundation of China [20], have actively supported research in the field of VC. Considerable research has also been performed within academia, often in connection with the aforementioned projects.
The analytical tools of Scopus and WoS make it possible to identify the main players involved in VC technological development. Figure 5 shows the number of documents by affiliation, including the most important institutions, companies, and universities involved in VC.
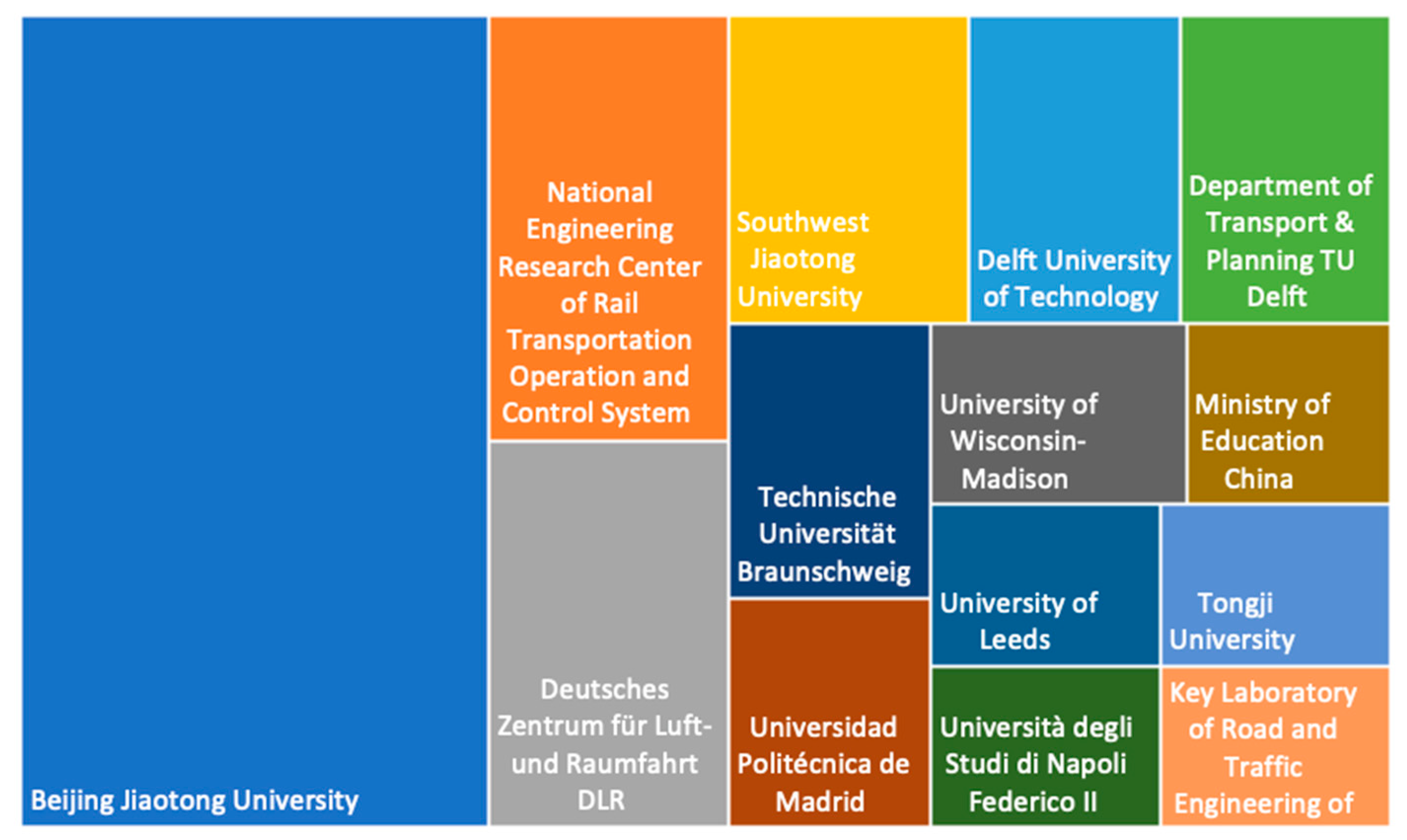
Figure 5. Documents by affiliation (with more than 4 publications). Source Scopus.
4. Research in the Field of Virtual Coupling
In general terms, research in industry has focused on the feasibility of VC implementation and operation, whereas research in academia, which is coordinated with industry, has focused on control and communication systems. Reference [21] presents an overview of the main topics of current railway-related VC research and presents a perspective on future research in this field.
Several international research and development projects have been conducted in the field of VC, mainly focusing on evaluating the feasibility of VC and establishing a general framework for its deployment. In this way, various studies on the implementation of VC in train operation and traffic management were performed, several of which focused on the market potential and preliminary operational scenarios of VC and presented the results of an extensive stakeholder survey in the European railway industry, in which expert opinions on the potential and challenges of VC were gathered, as can be seen in [22][23][24].
From a technological perspective, several aspects are necessary for the design of a VC system. These aspects include issues related to the control communication topology, dynamic model to support the control algorithms, control methods considered in VC, and sensors and communication systems used.
In the field of control communication topology, decentralized architectures are used in most studies, although centralized architectures are also used. However, in general terms, multi-vehicle distributed architectures are not considered, which can resolve the drawbacks of decentralized V2V communication and high requirements of the centralized ones. Several references present these ideas, as can be seen in [25][26][27][28][29][30].
In the field of dynamic models, most researchers have used models based on the point-mass model, and more complete dynamic models are required. The use of these more complex models implies a higher computational load; therefore, distributed computing may need to be used for the development of controllers.
MPC was identified as the most widely used control technique and the one most likely to be used in the future, not only because of the power of its formulation but also because of its adaptability to future needs in the field, such as stochastic, adaptive, and learning control. Significant references can be found in [25][26][29][30][31][32][33][34][35][36][37][38][39][40][41].
In the field of communications, the challenges include high-latency communication, reliable and secure communication, and the development of controllers that are secure and robust against communication failures and communication attacks.
Finally, there are two topics that are largely in their incipient stages in the VC framework and that will be key in the near future: (1) cybersecurity and (2) AI, including intelligent control, RL, and Big Data analytics, as can be seen in references [42][43][44][45][46][47].
In addition, there are also barriers, threats and problems that can be presented in the VC deployment. Reference [48] provided a good approach of problems and opportunities of VC in railways. In any case, the authors consider that VC is likely to be the technology of choice for future train control systems.
References
- D.-G. for M. and T. European Commission, “EU transport in figures : statistical pocketbook ,” 2021.
- IEEE, “IEEE 1474.1-2004 Standard for Communications-Based Train Control (CBTC). Performance and Functional Requirements,” 2004. https://standards.ieee.org/ieee/1474.1/3552/
- N. Furness, H. van Houten, M. Bartholomeus, and L. Arenas, “ERTMS Level 3: the Game-Changer,” IRSE, 2017.
- Qing Wu, Xiaohua Ge, Shengyang Zhu, Colin Cole, and Maksym Spiryagin, “Physical coupling and decoupling of railway trains at cruising speeds: train control and dynamics,” International Journal of Rail Transportation, 2023.
- M. Nold and F. Corman, “Dynamic train unit coupling and decoupling at cruising speed: Systematic classification, operational potentials, and research agenda,” Journal of Rail Transport Planning & Management, vol. 18, p. 100241, Jun. 2021, doi: 10.1016/j.jrtpm.2021.100241.
- M. Nold, “Coupling assistance device for coupling and uncoupling rail vehicles during travel,” 2019
- E. Quaglietta, M. Wang, and R. M. P. Goverde, “A multi-state train-following model for the analysis of virtual coupling railway operations,” Journal of Rail Transport Planning & Management, vol. 15, p. 100195, Sep. 2020, doi: 10.1016/j.jrtpm.2020.100195.
- T. Schumann, “Increase of capacity on the shinkansen high-speed line using virtual coupling,” International Journal of Transport Development and Integration, vol. 1, no. 4, pp. 666–676, Jan. 2017, doi: 10.2495/TDI-V1-N4-666-676.
- E. Quaglietta, P. Spartalis, M. Wang, R. M. P. Goverde, and P. van Koningsbruggen, “Modelling and analysis of Virtual Coupling with dynamic safety margin considering risk factors in railway operations,” Journal of Rail Transport Planning & Management, vol. 22, p. 100313, Jun. 2022, doi: 10.1016/j.jrtpm.2022.100313.
- B. Ning, “Absolute Braking And Relative Distance Braking - Train Operation Control Modes In Moving Block Systems,” WIT Transactions on The Built Environment, vol. 37, 1998.
- C. Williams, “The next ETCS Level?,” 2016 IEEE International Conference on Intelligent Rail Transportation (ICIRT), pp. 75–79, Aug. 2016, doi: 10.1109/ICIRT.2016.7588713.
- J. Winter, A. Lehner, and E. Polisky, “Electronic Coupling of Next Generation Trains,” in Third International Conference on Railway Technology: Research, Development and Maintenance, 110, Calgary, 2016. doi: 10.4203/ccp.110.189.
- Ian Mitchell et al., “ERTMS Level 4, Train Convoys or Virtual Coupling,” IRSE News, 2016. https://webinfo.uk/webdocssl/irse-kbase/ref-viewer.aspx?Refno=1882928268&document=ITC%20Report%2039%20Train%20convoys%20and%20virtual%20coupling.pdf (accessed Oct. 07, 2022).
- U. Bock and J. U. Varchmin, “Enhancement of the Occupancy of Railroads Using Virtually Coupled Train Formations,” World Congress on Railway Research (WCRR), 1999.
- U. Bock and G. Bikker, “Design and Development of a Future Freight Train Concept – ‘Virtually Coupled Train Formations,’” IFAC Proceedings Volumes, vol. 33, no. 9, pp. 395–400, Jun. 2000, doi: 10.1016/S1474-6670(17)38176-4.
- Shift2Rail, “The Rail Joint Undertaking,” 2015. https://projects.shift2rail.org/ (accessed Jan. 04, 2023).
- Shift2Rail, “Shift2Rail Strategic Master Plan,” 2015. https://rail-research.europa.eu/wp-content/uploads/2016/03/S2R-JU-GB_Decision-N-4-2015-on-the-adoption-of-the-S2R-Master-Plan.pdf (accessed Jan. 04, 2023).
- Europe’s Rail, “Europe’s Rail Join Undertaking,” 2023.
- “National Key R&D Program of China,” https://chinainnovationfunding.eu/national-key-rd-programmes/. https://chinainnovationfunding.eu/national-key-rd-programmes/ (accessed Dec. 27, 2022).
- NSFC, “National Natural Science Foundation of China,” 2023. https://www.nsfc.gov.cn/english/site_1/index.html (accessed Jan. 19, 2023).
- J. Felez and M. A. Vaquero-Serrano, “Virtual Coupling in Railways: A Comprehensive Review,” Machines, vol. 11, no. 5, p. 521, May 2023, doi: 10.3390/machines11050521.
- S. Stickel et al., “Technical feasibility analysis and introduction strategy of the virtually coupled train set concept,” Sci Rep, vol. 12, no. 1, p. 4248, Mar. 2022, doi: 10.1038/s41598-022-08215-y.
- J. Aoun, E. Quaglietta, and R. M. P. Goverde, “Investigating Market Potentials and Operational Scenarios of Virtual Coupling Railway Signaling,” Transportation Research Record: Journal of the Transportation Research Board, vol. 2674, no. 8, pp. 799–812, Aug. 2020, doi: 10.1177/0361198120925074.
- J. Aoun et al., “A hybrid Delphi-AHP multi-criteria analysis of Moving Block and Virtual Coupling railway signalling,” Transp Res Part C Emerg Technol, vol. 129, p. 103250, Aug. 2021, doi: 10.1016/j.trc.2021.103250.
- Y. Yang and F. Yan, “Research on Train Dynamic Coupling Strategy Based on Distributed Model Predictive Control,” J Phys Conf Ser, vol. 2183, no. 1, p. 012029, Jan. 2022, doi: 10.1088/1742-6596/2183/1/012029.
- Y. Liu, R. Liu, C. Wei, J. Xun, and T. Tang, “Distributed Model Predictive Control Strategy for Constrained High-Speed Virtually Coupled Train Set,” IEEE Trans Veh Technol, vol. 71, no. 1, pp. 171–183, Jan. 2022, doi: 10.1109/TVT.2021.3130715.
- W. Bai, H. Dong, J. Lu, and Y. Li, “Event-Triggering Communication Based Distributed Coordinated Control of Multiple High-Speed Trains,” IEEE Trans Veh Technol, vol. 70, no. 9, pp. 8556–8566, Sep. 2021, doi: 10.1109/TVT.2021.3099529.
- K. Chu, “Decentralized Control of High-Speed Vehicular Strings,” Transportation Science, vol. 8, no. 4, pp. 361–384, Nov. 1974, doi: 10.1287/trsc.8.4.361.
- J. Felez, Y. Kim, and F. Borrelli, “A Model Predictive Control Approach for Virtual Coupling in Railways,” IEEE Transactions on Intelligent Transportation Systems, vol. 20, no. 7, pp. 2728–2739, Jul. 2019, doi: 10.1109/TITS.2019.2914910.
- M. A. Vaquero-Serrano and J. Felez, “A decentralized robust control approach for virtually coupled train sets,” Computer-Aided Civil and Infrastructure Engineering, pp. 1–20, Mar. 2023, doi: https://doi.org/10.1111/mice.12985.
- Y. Yang, D. Ou, Y. Liu, and D. Dong, “Transition Control of Virtual Coupling Train Formation Based on Model Predictive Control,” pp. 673–684, 2022, doi: 10.1007/978-981-16-9913-9_74.
- Z. Wu, C. Gao, and T. Tang, “A Virtually Coupled Metro Train Platoon Control Approach Based on Model Predictive Control,” IEEE Access, vol. 9, pp. 56354–56363, 2021, doi: 10.1109/ACCESS.2021.3071820.
- J. She, K. Li, L. Yuan, Y. Zhou, and S. Su, “Cruising Control Approach for Virtually Coupled Train Set Based on Model Predictive Control,” 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), pp. 1–6, Sep. 2020, doi: 10.1109/ITSC45102.2020.9294534.
- M. Chen, J. Xun, and Y. Liu, “A Coordinated Collision Mitigation Approach for Virtual Coupling Trains by Using Model Predictive Control,” 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), pp. 1–6, Sep. 2020, doi: 10.1109/ITSC45102.2020.9294633.
- M. Chai, H. Su, and H. Liu, “Long Short-Term Memory-Based Model Predictive Control for Virtual Coupling in Railways,” Wirel Commun Mob Comput, vol. 2022, pp. 1–17, Feb. 2022, doi: 10.1155/2022/1859709.
- X. Luo, H. Liu, L. Zhang, and J. Xun, “A Model Predictive Control Based Inter-Station Driving Strategy for Virtual Coupling Trains in Railway System,” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), pp. 3927–3932, Sep. 2021, doi: 10.1109/ITSC48978.2021.9564895.
- J. Xun, J. Yin, R. Liu, F. Liu, Y. Zhou, and T. Tang, “Cooperative control of high-speed trains for headway regulation: A self-triggered model predictive control based approach,” Transp Res Part C Emerg Technol, vol. 102, pp. 106–120, May 2019, doi: 10.1016/j.trc.2019.02.023.
- H. Zhao, X. Dai, Q. Zhang, and J. Ding, “Robust Event-Triggered Model Predictive Control for Multiple High-Speed Trains With Switching Topologies,” IEEE Trans Veh Technol, vol. 69, no. 5, pp. 4700–4710, May 2020, doi: 10.1109/TVT.2020.2974979.
- S. Su, J. She, K. Li, X. Wang, and Y. Zhou, “A Nonlinear Safety Equilibrium Spacing-Based Model Predictive Control for Virtually Coupled Train Set Over Gradient Terrains,” IEEE Transactions on Transportation Electrification, vol. 8, no. 2, pp. 2810–2824, Jun. 2022, doi: 10.1109/TTE.2021.3134669.
- C. Di Meo, M. Di Vaio, F. Flammini, R. Nardone, S. Santini, and V. Vittorini, “ERTMS/ETCS Virtual Coupling: Proof of Concept and Numerical Analysis,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 6, pp. 2545–2556, Jun. 2020, doi: 10.1109/TITS.2019.2920290.
- Y. Liu, Y. Zhou, S. Su, J. Xun, and T. Tang, “Control strategy for stable formation of high‐speed virtually coupled trains with disturbances and delays,” Computer-Aided Civil and Infrastructure Engineering, Jun. 2022, doi: 10.1111/mice.12873.
- X. Wang, D. Huang, and H. Xing, “A Train Cooperative Operation Optimization Method based on Improved Reinforcement Learning Algorithm,” 2022 4th International Conference on Industrial Artificial Intelligence (IAI), pp. 1–6, Aug. 2022, doi: 10.1109/IAI55780.2022.9976538.
- X. Wang, Y. Wu, D. Huang, L. Zhu, Z. Lu, and Y. He, “A Train Cooperative Operation Optimization Method Considering Passenger Comfort based on Reinforcement Learning,” 2022 IEEE 11th Data Driven Control and Learning Systems Conference (DDCLS), pp. 368–373, Aug. 2022, doi: 10.1109/DDCLS55054.2022.9858409.
- H. Liu, L. Yang, and H. Yang, “Cooperative Optimal Control of the Following Operation of High-Speed Trains,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 10, pp. 17744–17755, Oct. 2022, doi: 10.1109/TITS.2022.3163971.
- H. Su, M. Chai, L. Chen, and J. Lv, “Deep Learning-Based Model Predictive Control for Virtual Coupling Railways Operation,” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), pp. 3490–3495, Sep. 2021, doi: 10.1109/ITSC48978.2021.9564411.
- Z. Du, H. Wu, Z. Yang, and X. Wen, “Research on intelligent formation operation performance of straddle-type rapid transit vehicles in heterogeneous operating environment,” Mechanics, vol. 29, no. 1, pp. 59–66, Feb. 2023, doi: 10.5755/j02.mech.32110.
- X. Zhou, F. Lu, and L. Wang, “Optimization of Train Operation Planning with Full-Length and Short-Turn Routes of Virtual Coupling Trains,” Applied Sciences, vol. 12, no. 15, p. 7935, Aug. 2022, doi: 10.3390/app12157935.
- J. Aoun, E. Quaglietta, and R. M. P. Goverde, “Roadmap development for the deployment of virtual coupling in railway signalling,” Technol Forecast Soc Change, vol. 189, p. 122263, Apr. 2023, doi: 10.1016/j.techfore.2022.122263.


