Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics. Encyclopedia. Available online: https://encyclopedia.pub/entry/36150 (accessed on 26 July 2026).
Li Y, Liu M, Jiang D. Application of Unmanned Aerial Vehicles in Logistics. Encyclopedia. Available at: https://encyclopedia.pub/entry/36150. Accessed July 26, 2026.
Li, Yi, Min Liu, Dandan Jiang. "Application of Unmanned Aerial Vehicles in Logistics" Encyclopedia, https://encyclopedia.pub/entry/36150 (accessed July 26, 2026).
Li, Y., Liu, M., & Jiang, D. (2022, November 24). Application of Unmanned Aerial Vehicles in Logistics. In Encyclopedia. https://encyclopedia.pub/entry/36150
Li, Yi, et al. "Application of Unmanned Aerial Vehicles in Logistics." Encyclopedia. Web. 24 November, 2022.
Copy Citation
Unmanned Aerial Vehicles (UAVs)/drones are used in the logistics field because of their flexibility, low cost, environmental protection and energy-saving advantages, which can achieve both economic benefits and social benefits.
logistics
UAV
drones
1. Introduction
The widespread adoption of green vehicles in logistics may help alleviate problems such as environmental pollution, global warming and oil dependency. In this context, Unmanned Aerial Vehicles (UAVs)/drones may represent a useful and innovative means of transportation [1]. UAVs are unmanned aircrafts that use radio remote control equipment and self-contained program control devices or are operated completely or intermittently by on-board computers.
As a technology with high flexibility, low cost, environmental protection, energy conservation and other advantages, UAVs are applied in logistics. The application of UAVs can reduce the number of vans or lorries circulating in the city, thereby reducing traffic congestion, noise pollution and pollution emissions. The application of UAVs in the field of logistics can be subclassified into: regional UAV transportation, UAVs express delivery (terminal distribution), UAVs rescue (emergency logistics) and UAVs storage management (inventory, inspection, etc.), among which regional UAV transportation and UAV terminal distribution are the main forms. There are two types of UAV distribution systems, of which the main forms are branch line UAV transportation and UAV terminal distribution. The UAVs used by two well-known logistics companies in China serve as an example: one is the “point-to-multiple” UAV logistics distribution mode represented by JD, which involves control of multiple UAVs, while the other is the “peer-to-peer” UAV logistics distribution mode represented by S.F. Express, which involves control of a single UAV.
2. Application of UAVs in Logistics
It can be seen that most previous reviews [2][3][4][5] focused on summarizing the theoretical models, while some [6][7] focused on summarizing the application scenarios. Researchers summarize the literature on logistics drones in the last two years based on the theoretical models and application scenarios and propose the following content framework (see Figure 1).
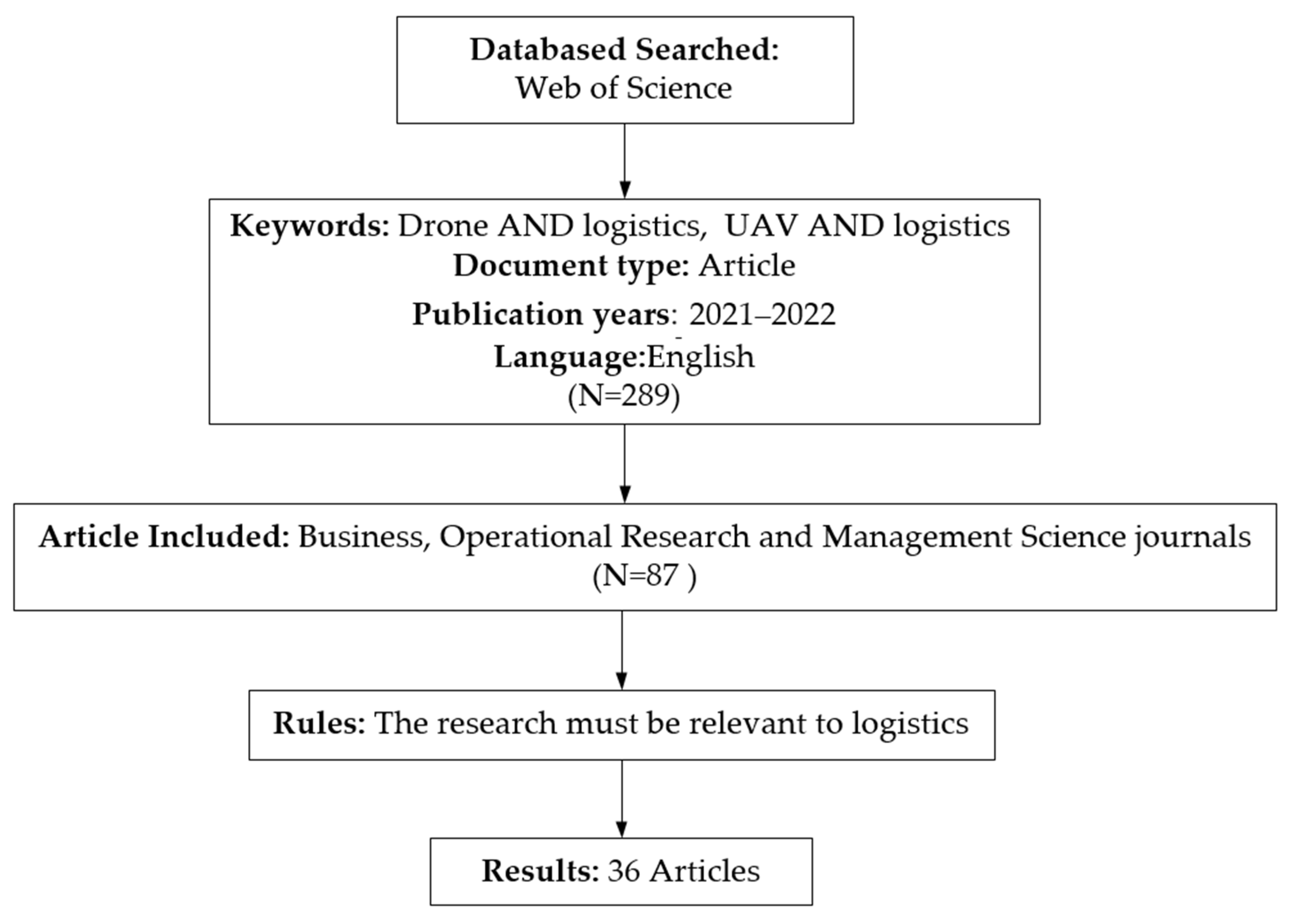
Figure 1. Content framework.
2.1. Theoretical Models
The previous reviews [2][3][4][5] focused on summarizing the route planning problem in theoretical models, mainly involving the optimization of paths, which specifically include the mathematical models, the solution methods and the types of UAVs used in the literature. Due to the complexity and dynamics of the path environment, it is not easy for UAVs to accomplish distribution tasks under various safety risks (e.g., crashes and collisions), and the development of efficient and flexible UAV path planning algorithms have become inevitable [8]. The relevant literature in the last two years also focuses on the study of route planning problems in the theoretical model. Many scholars used different algorithms to achieve the goals of path minimization, cost minimization, etc. Among them, there is much literature on the traveling salesman problem. Considering that the traveling salesman problem belongs to a special path planning problem and partially overlaps with the research content of the last mile problem, the traveling salesman problem is classified into one category and other path planning problems are classified into another category.
2.2. Application Scenarios
A previous review [6] summarized the novel delivery concepts and decision problems for last-mile delivery in application scenarios. Another review [7] focused on summarizing the latest optimization methods and synchronization between trucks and drones. The literature related to logistics drones in the last two years mainly focuses on last-mile delivery problems and medical safety issues in application scenarios. With vehicle congestion and customer dispersion, timely delivery has become a challenge for last-mile delivery. In recent years in the environment of the COVID-19 epidemic, the rapid spread of viruses and the high rate of infection in the population have made logistics delivery more difficult. The safety of drone delivery in medical safety has become one of the research topics for many scholars. In addition, the pricing and cost of UAVs have also received a lot of attention.
2.3. Other Problems
In addition to the theoretical model and application scenarios, nine studies remain that are not summarized, including studies on UAV scheduling problems, UAV pricing problems and obstacles to UAV implementation.
UAV delivery will encounter more difficulties than manual delivery. Bhawesh Sah et al. identified and prioritized the barriers to UAV logistics implementation based on their criticality by using the fuzzy Delphi method (FDM) and the analytic hierarchy process (AHP). Initially, 34 barriers are identified through expert opinion and an extensive literature review. Finally, the management significance of the research results that can help practitioners and decision-makers to effectively implement drones in the logistics department is discussed [9]. Aditya Kamat et al. analyzed the various barriers hindering the implementation of UAVs in humanitarian logistics for both developed and developing nations, and they propose an interval-valued intuitionistic fuzzy set (IVIFS) to calculate a UAV implementation hindrance index (DIHI) [10].
Due to the limitation of delivery time, Yohei HAZAMA et al. proposed a GA to solve the package delivery scheduling problem. They define the parcel delivery scheduling problem as finding the assignment of customers to both the UAVs and their takeoff points. The purpose is to find the near-optimal solution in a short time to reduce the cost and time required for package delivery [11]. Kai Wang et al. proposed a piggyback transportation problem based on the last-mile flying warehouse; they formulated the Piggyback Transportation Problem, investigated its computational complexity and derived suitable solution procedures [12].
Considering the economic benefits of using UAVs for delivery, Zhi Pei et al. focused on the UAVs sharing system, wherein revenue management becomes vital in terms of pricing, UAV hiring cost and service-related cost. A time-varying and price-sensitive queueing model is formulated, where the customer behaviors are taken into account. Different algorithms are used to solve the problem of high, medium and low service quality objectives [13]. Yaohan Shen et al. studied a multi-warehouse UAV delivery system, considering the allocation rule that all warehouses share the UAVs and the allocation rule that each warehouse owns its UAVs. Both plug-in charge and battery swap strategies are investigated for battery management. They developed a cost minimization model for cost analysis [14]. Marc Antoine Coindreau et al. considered global costs, including fixed daily vehicles fares, driver wages and fuel and electricity consumption to power trucks and UAVs, and proposed a mixed-integer linear programming formulation and an adaptive large neighborhood search to solve a parcel delivery problem with a fleet of trucks embedded with UAVs [15]. Suttinee Sawadsitnag et al. considered the uncertain factors of the implementation of UAVs in the logistics field and proposed the BCoSDD framework, which is composed of three functions: package assignment, shipper cooperation formation and cost management in order to minimize their UAVs delivery cost [16]. Considering the limited capacity of UAVs, James F. Campbell et al. proposed a branch-cut algorithm and a mathematical method to address the Length Constrained K-UAVs Rural Postman Problem (LC K-DRPP) [17].
References
- Patella, S.M.; Grazieschi, G.; Gatta, V.; Marcucci, E.; Carrese, S. The adoption of green vehicles in last mile logistics: A systematic review. Sustainability 2020, 13, 6.
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Pt. C-Emerg. Technol 2020, 120, 102762.
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 2021, 43, 1–58.
- Chung, S.H.; Sah, B. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res 2020, 123, 105004.
- Liang, Y.J.; Luo, Z.X. A Survey of Truck-Drone Routing Problem: Literature Review and Research Prospects. Journal of the Operations Research Society of China 2022, 10, 343–377.
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854.
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. Eur. J. Oper. Res 2021, 294, 1078–1095.
- Li, D.; Yin, W.; Wong, W.E.; Jian, M.; Chau, M. Quality-oriented hybrid path planning based on a* and q-learning for unmanned aerial vehicle. IEEE Access 2021, 10, 7664–7674.
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist.-Res. Appl. 2021, 24, 531–550.
- Kamat, A.; Shanker, S.; Barve, A.; Muduli, K.; Mangla, S.K.; Luthra, S. Uncovering interrelationships between barriers to unmanned aerial vehicles in humanitarian logistics. Oper. Manag. Res. 2022, 1–27.
- Hazama, Y.; Iima, H.; Karuno, Y.; Mishima, K. Genetic algorithm for scheduling of parcel delivery by drones. Adv. Mech. Des. Syst. Manuf. 2021, 15, JAMDSM0069.
- Wang, K.; Pesch, E.; Kress, D.; Fridman, I.; Boysen, N. The piggyback transportation problem: Transporting drones launched from a flying warehouse. Eur. J. Oper. Res. 2021, 296, 504–519.
- Pei, Z.; Dai, X.; Yuan, Y.; Du, R.; Liu, C. Managing price and fleet size for courier service with shared drones. Omega-Int. J. Manage. Sci. 2021, 104, 102482.
- Shen, Y.; Xu, X.; Zou, B.; Wang, H. Operating policies in multi-warehouse drone delivery systems. Int. J. Prod. Res. 2021, 59, 2140–2156.
- Coindreau, M.A.; Gallay, O.; Zufferey, N. Parcel delivery cost minimization with time window constraints using trucks and drones. Networks 2021, 78, 400–420.
- Sawadsitang, S.; Niyato, D.; Siew, T.P.; Wang, P.; Nutanong, S. Shipper cooperation in stochastic drone delivery: A dynamic bayesian game approach. IEEE Trans. Veh. Technol. 2021, 70, 7437–7452.
- Campbell, J.F.; Corberán, Á.; Plana, I.; Sanchis, J.M.; Segura, P. Solving the length constrained k-drones rural postman problem. Eur. J. Oper. Res. 2021, 292, 60–72.
More
Information
Subjects:
Operations Research & Management Science
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.9K
Revisions:
2 times
(View History)
Update Date:
24 Nov 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No