 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Vivi Li | -- | 2625 | 2022-11-02 01:43:05 |
Video Upload Options
The Kelvin–Stokes theorem, named after Lord Kelvin and George Stokes, also known as the Stokes' theorem, the fundamental theorem for curls or simply the curl theorem, is a theorem in vector calculus on [math]\displaystyle{ \mathbb{R}^3 }[/math]. Given a vector field, the theorem relates the integral of the curl of the vector field over some surface, to the line integral of the vector field around the boundary of the surface. If a vector field [math]\displaystyle{ \mathbf{A} = (P(x, y, z), Q(x, y, z), R(x, y, z)) }[/math] is defined in a region with smooth oriented surface [math]\displaystyle{ \Sigma }[/math] and has first order continuous partial derivatives then: where [math]\displaystyle{ \partial \Sigma }[/math] is boundary of region with smooth surface [math]\displaystyle{ \Sigma }[/math]. The above classical Kelvin-Stokes theorem can be stated in one sentence: The line integral of a vector field over a loop is equal to the flux of its curl through the enclosed surface. The Kelvin–Stokes theorem is a special case of the "generalized Stokes' theorem." In particular, a vector field on [math]\displaystyle{ \mathbb{R}^3 }[/math] can be considered as a 1-form in which case its curl is its exterior derivative, a 2-form.
1. Theorem
The main challenge in a precise statement of Stokes' theorem is in defining the notion of a boundary. Surfaces such as the Koch snowflake, for example, are well-known not to exhibit a Riemann-integrable boundary, and the notion of surface measure in Lebesgue theory cannot be defined for a non-Lipschitz surface. One (advanced) technique is to pass to a weak formulation and then apply the machinery of geometric measure theory; for that approach see the coarea formula. In this article, we instead use a more elementary definition, based on the fact that a boundary can be discerned for full-dimensional subsets of ℝ2.
Let γ: [a, b] → R2 be a piecewise smooth Jordan plane curve. The Jordan curve theorem implies that γ divides R2 into two components, a compact one and another that is non-compact. Let D denote the compact part; then D is bounded by γ. It now suffices to transfer this notion of boundary along a continuous map to our surface in ℝ3. But we already have such a map: the parametrization of Σ.
Suppose ψ: D → R3 is smooth, with Σ = ψ(D). If Γ is the space curve defined by Γ(t) = ψ(γ(t))[1], then we call Γ the boundary of Σ, written ∂Σ.
With the above notation, if F is any smooth vector field on R3, then[2][3][math]\displaystyle{ \oint_{\partial\Sigma} \mathbf{F}\, \cdot\, d{\mathbf{\Gamma}} = \iint_{\Sigma} \nabla\times\mathbf{F}\, \cdot\, d\mathbf{S}. }[/math]
2. Proof
The proof of the theorem consists of 4 steps. We assume Green's theorem, so what is of concern is how to boil down the three-dimensional complicated problem (Kelvin–Stokes theorem) to a two-dimensional rudimentary problem (Green's theorem).[4] When proving this theorem, mathematicians normally deduce it as a special case of a more general result, which is stated in terms of differential forms, and proved using more sophisticated machinery. While powerful, these techniques require substantial background, so the proof below avoids them, and does not presuppose any knowledge beyond a familiarity with basic vector calculus.[3] At the end of this section, a short alternate proof of the Kelvin-Stokes theorem is given, as a corollary of the generalized Stokes' Theorem.
2.1. Elementary Proof
First step of the proof (parametrization of integral)
As in Theorem § Notes, we reduce the dimension by using the natural parametrization of the surface. Let ψ and γ be as in that section, and note that by change of variables
- [math]\displaystyle{ \oint_{\partial\Sigma}{\mathbf{F}(\mathbf{x})\cdot\,d\mathbf{l}}=\oint_{\gamma}{\mathbf{F}(\mathbf{\psi}(\mathbf{y}))\cdot\,d\mathbf{\psi}(\mathbf{y})}=\oint_{\gamma}{\mathbf{F}(\mathbf{\psi}(\mathbf{y}))J_{\mathbf{y}}(\mathbf{\psi})\,d\mathbf{y}} }[/math]
where Jψ stands for the Jacobian matrix of ψ.
Now let {eu,ev} be an orthonormal basis in the coordinate directions of ℝ2. Recognizing that the columns of Jyψ are precisely the partial derivatives of ψ at y , we can expand the previous equation in coordinates as
- [math]\displaystyle{ \begin{align} \oint_{\partial\Sigma}{\mathbf{F}(\mathbf{x})\cdot\,d\mathbf{l}}&=\oint_{\gamma}{\mathbf{F}(\mathbf{\psi}(\mathbf{y}))J_{\mathbf{y}}(\mathbf{\psi})\mathbf{e}_u(\mathbf{e}_u\cdot\,d\mathbf{y})+\mathbf{F}(\mathbf{\psi}(\mathbf{y}))J_{\mathbf{y}}(\mathbf{\psi})\mathbf{e}_v(\mathbf{e}_v\cdot\,d\mathbf{y})} \\ &=\oint_{\gamma}{\left(\left(\mathbf{F}(\mathbf{\psi}(\mathbf{y}))\cdot\frac{\partial\mathbf{\psi}}{\partial u}(\mathbf{y})\right)\mathbf{e}_u+\left(\mathbf{F}(\mathbf{\psi}(\mathbf{y}))\cdot\frac{\partial\mathbf{\psi}}{\partial v}(\mathbf{y})\right)\mathbf{e}_v\right)\cdot\,d\mathbf{y}} \end{align} }[/math]
Second step in the proof (defining the pullback)
The previous step suggests we define the function
- [math]\displaystyle{ \mathbf{P}(u,v)=\left(\mathbf{F}(\mathbf{\psi}(u,v))\cdot\frac{\partial\mathbf{\psi}}{\partial u}(u,v)\right)\mathbf{e}_u+\left(\mathbf{F}(\mathbf{\psi}(u,v))\cdot\frac{\partial\mathbf{\psi}}{\partial v} \right)\mathbf{e}_v }[/math]
This is the pullback of F along ψ , and, by the above, it satisfies
- [math]\displaystyle{ \oint_{\partial\Sigma}{\mathbf{F}(\mathbf{x})\cdot\,d\mathbf{l}}=\oint_{\gamma}{\mathbf{P}(\mathbf{y})\cdot\,d\mathbf{l}} }[/math]
We have successfully reduced one side of Stokes' theorem to a 2-dimensional formula; we now turn to the other side.
Third step of the proof (second equation)
First, calculate the partial derivatives appearing in Green's theorem, via the product rule:
- [math]\displaystyle{ \begin{align} \frac{\partial P_1}{\partial v} &= \frac{\partial (\mathbf{F}\circ \psi)}{\partial v}\cdot\frac{\partial \psi}{\partial u} + (\mathbf{F}\circ\psi)\cdot\frac{\partial^2 \psi}{ \partial v \partial u} \\ \frac{\partial P_2}{\partial u} &= \frac{\partial (\mathbf{F}\circ \psi)}{\partial u}\cdot\frac{\partial \psi}{\partial v} + (\mathbf{F}\circ \psi) \cdot\frac{\partial^2 \psi}{\partial u \partial v} \end{align} }[/math]
Conveniently, the second term vanishes in the difference, by equality of mixed partials. So,
- [math]\displaystyle{ \begin{align} \frac{\partial P_1}{\partial v} - \frac{\partial P_2}{\partial u} &= \frac{\partial (\mathbf{F}\circ \psi)}{\partial v}\cdot\frac{\partial \psi}{\partial u} - \frac{\partial (\mathbf{F}\circ \psi)}{\partial u}\cdot\frac{\partial \psi}{\partial v} \\ &= \frac{\partial \psi}{\partial u}(J_{\psi(u,v)}\mathbf{F})\frac{\partial \psi}{\partial v} - \frac{\partial \psi}{\partial v}(J_{\psi(u,v)}\mathbf{F})\frac{\partial \psi}{\partial u} && \text{ (chain rule)}\\ &= \frac{\partial \psi}{\partial u}(J_{\psi(u,v)}\mathbf{F}-(J_{\psi(u,v)}\mathbf{F})^{\mathsf{T}})\frac{\partial \psi}{\partial v} \end{align} }[/math]
But now consider the matrix in that quadratic form—that is, [math]\displaystyle{ J_{\psi(u,v)}\mathbf{F}-(J_{\psi(u,v)}\mathbf{F})^{\mathsf{T}} }[/math]. We claim this matrix in fact describes a cross product.
To be precise, let [math]\displaystyle{ A=(A_{ij})_{ij} }[/math] be an arbitrary 3 × 3 matrix and let
- [math]\displaystyle{ \mathbf{a}=\begin{pmatrix}A_{32}-A_{23} \\ A_{13}-A_{31} \\ A_{21}-A_{12}\end{pmatrix} }[/math]
Note that x ↦ a × x is linear, so it is determined by its action on basis elements. But by direct calculation
- [math]\displaystyle{ \begin{align} (A-A^{\mathsf{T}})\mathbf{e}_1 &= \begin{pmatrix} 0 \\ a_3\\ -a_2 \end{pmatrix} = \mathbf{a}\times\mathbf{e}_1\\ (A-A^{\mathsf{T}})\mathbf{e}_2 &= \begin{pmatrix} -a_3\\ 0\\ a_1 \end{pmatrix} = \mathbf{a}\times \mathbf{e}_{2}\\ (A-A^{\mathsf{T}})\mathbf{e}_3 &= \begin{pmatrix} a_2\\ -a_1\\ 0 \end{pmatrix} = \mathbf{a}\times\mathbf{e}_{3} \end{align} }[/math]
Thus (A-AT) x = a × x for any x . Substituting J F for A, we obtain
- [math]\displaystyle{ ({(J_{\psi(u,v)}\mathbf{F})}_{\psi(u,v)} - {(J_{\psi(u,v)}\mathbf{F})}^{\mathsf{T}}) \mathbf{x} =(\nabla\times\mathbf{F})\times \mathbf{x}, \quad \text{for all}\, \mathbf{x}\in\mathbf{R}^{3} }[/math]
We can now recognize the difference of partials as a (scalar) triple product:
- [math]\displaystyle{ \begin{align} \frac{\partial P_1}{\partial v} - \frac{\partial P_2}{\partial u} &= \frac{\partial \psi}{\partial u}\cdot(\nabla\times\mathbf{F})\times\frac{\partial \psi}{\partial v} \\ &=\det \left [ (\nabla\times\mathbf{F})(\psi(u,v)) \quad \frac{\partial\psi}{\partial u}(u,v) \quad \frac{\partial\psi}{\partial v}(u,v) \right ] \end{align} }[/math]
On the other hand, the definition of a surface integral also includes a triple product—the very same one!
- [math]\displaystyle{ \begin{align} \iint_S (\nabla\times\mathbf{F})\cdot \, d^2\mathbf{S} &=\iint_D{(\nabla\times\mathbf{F})(\psi(u,v))\cdot\left(\frac{\partial\psi}{\partial u}(u,v)\times \frac{\partial\psi}{\partial v}(u,v)\,du\,dv\right)}\\ &= \iint_D \det \left [ (\nabla\times\mathbf{F})(\psi(u,v)) \quad \frac{\partial\psi}{\partial u}(u,v) \quad \frac{\partial\psi}{\partial v}(u,v) \right ] \,du \,dv \end{align} }[/math]
So, we obtain
- [math]\displaystyle{ \iint_S (\nabla\times\mathbf{F})\cdot \,d^2\mathbf{S} =\iint_D \left( \frac{\partial P_2}{\partial u} - \frac{\partial P_1}{\partial v} \right) \,du\,dv }[/math]
Fourth step of the proof (reduction to Green's theorem)
Combining the second and third steps, and then applying Green's theorem completes the proof.
2.2. Proof via Differential Forms
ℝ→ℝ3 can be identified with the differential 1-forms on ℝ3 via the map
- [math]\displaystyle{ F_1\mathbf{e}_1+F_2\mathbf{e}_2+F_3\mathbf{e}_3 \mapsto F_1\,dx+F_2\,dy+F_3dy }[/math].
Write the differential 1-form associated to a function F as ωF. Then one can calculate that
- [math]\displaystyle{ \star\omega_{\nabla\times\mathbf{F}}=d\omega_{\mathbf{F}} }[/math]
where ★ is the Hodge star and [math]\displaystyle{ d }[/math] is the exterior derivative. Thus, by generalized Stokes' theorem,[5]
- [math]\displaystyle{ \oint_{\partial\Sigma}{\mathbf{F}\cdot\,d\mathbf{l}}=\oint_{\partial\Sigma}{\omega_{\mathbf{F}}}=\int_{\Sigma}{d\omega_{\mathbf{F}}}=\int_{\Sigma}{\star\omega_{\nabla\times\mathbf{F}}}=\iint_{\Sigma}{\nabla\times\mathbf{F}\cdot\,d^2\mathbf{S}} }[/math]
3. Applications
3.1. In Fluid Dynamics
In this section, we will discuss the lamellar vector field based on Kelvin–Stokes theorem.
3.2. Irrotational Fields
If the domain of F is simply connected, then F is a conservative vector field.
Helmholtz's theorems
In this section, we will introduce a theorem that is derived from the Kelvin–Stokes theorem and characterizes vortex-free vector fields. In fluid dynamics it is called Helmholtz's theorems.
Some textbooks such as Lawrence[6] call the relationship between c0 and c1 stated in Theorem 2-1 as "homotopic" and the function H: [0, 1] × [0, 1] → U as "homotopy between c0 and c1". However, "homotopic" or "homotopy" in above-mentioned sense are different (stronger than) typical definitions of "homotopic" or "homotopy"; the latter omit condition [TLH3]. So from now on we refer to homotopy (homotope) in the sense of Theorem 2-1 as a tubular homotopy (resp. tubular-homotopic).[8]
Proof of the theorem
In what follows, we abuse notation and use "+" for concatenation of paths in the fundamental groupoid and "-" for reversing the orientation of a path.
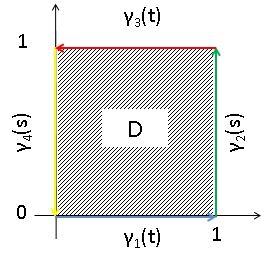
Let D = [0, 1] × [0, 1], and split ∂D into 4 line segments γj.
- [math]\displaystyle{ \begin{align} \gamma_1:[0,1] \to D;\quad&\gamma_1(t) = (t, 0) \\ \gamma_2:[0,1] \to D;\quad&\gamma_2(s) = (1, s) \\ \gamma_3:[0,1] \to D;\quad&\gamma_3(t) = (1-t, 1) \\ \gamma_4:[0,1] \to D;\quad&\gamma_4(s) = (0, 1-s) \partial D = \gamma_1+\gamma_2+\gamma_3+\gamma_4 \end{align} }[/math]
By our assumption that c1 and c2 are piecewise smooth homotopic, there is a piecewise smooth homotopy H: D → M
- [math]\displaystyle{ \begin{align} \Gamma_i(t) &= H(\gamma_{i}(t)) && i=1, 2, 3, 4 \\ \Gamma(t) &= H(\gamma(t)) =(\Gamma_1 \oplus \Gamma_2 \oplus \Gamma_3 \oplus \Gamma_4)(t) \end{align} }[/math]
Let S be the image of D under H. That
- [math]\displaystyle{ \iint_S \nabla\times\mathbf{F}\, dS = \oint_\Gamma \mathbf{F}\, d\Gamma }[/math]
follows immediately from the Kelvin–Stokes theorem. F is lamellar, so the left side vanishes, i.e.
- [math]\displaystyle{ 0=\oint_\Gamma \mathbf{F}\, d\Gamma = \sum_{i=1}^4 \oint_{\Gamma_i} \mathbf{F} \, d\Gamma }[/math]
As H is tubular, Γ2=-Γ4. Thus the line integrals along Γ2(s) and Γ4(s) cancel, leaving
- [math]\displaystyle{ 0=\oint_{\Gamma_1} \mathbf{F} \, d\Gamma +\oint_{\Gamma_3} \mathbf{F} d\Gamma }[/math]
On the other hand, c1=Γ1 and c3=-Γ3, so that the desired equality follows almost immediately.
3.3. Conservative Forces
Helmholtz's theorem gives an explanation as to why the work done by a conservative force in changing an object's position is path independent. First, we introduce the Lemma 2-2, which is a corollary of and a special case of Helmholtz's theorem.
Lemma 2-2 follows from Theorem 2-1. In Lemma 2-2, the existence of H satisfying [SC0] to [SC3] is crucial. If U is simply connected, such H exists. The definition of Simply connected space follows:
The claim that "for a conservative force, the work done in changing an object's position is path independent" might seem to follow immediately. But recall that simple-connection only guarantees the existence of a continuous homotopy satisfiying [SC1-3]; we seek a piecewise smooth hoomotopy satisfying those conditions instead.
However, the gap in regularity is resolved by the Whitney approximation theorem.[9]:136,421[10] We thus obtain the following theorem.
3.4. Maxwell's Equations
In the physics of electromagnetism, the Kelvin-Stokes theorem provides the justification for the equivalence of the differential form of the Maxwell–Faraday equation and the Maxwell–Ampère equation and the integral form of these equations. For Faraday's law, the Kelvin-Stokes theorem is applied to the electric field, [math]\displaystyle{ \mathbf{E} }[/math].
[math]\displaystyle{ \oint_{\partial\Sigma} \mathbf{E} \cdot \mathrm{d}\boldsymbol{l}= \iint_\Sigma \mathbf{\nabla}\times \mathbf{E} \cdot \mathrm{d} \mathbf{S} }[/math]
For Ampère's law, the Kelvin-Stokes theorem is applied to the magnetic field, [math]\displaystyle{ \mathbf{B} }[/math].
[math]\displaystyle{ \oint_{\partial\Sigma} \mathbf{B} \cdot \mathrm{d}\boldsymbol{l}= \iint_\Sigma \mathbf{\nabla}\times \mathbf{B} \cdot \mathrm{d} \mathbf{S} }[/math]
References
- Γ may not be a Jordan curve, if the loop γ interacts poorly with ψ. Nonetheless, Γ is always a loop, and topologically a connected sum of countably-many Jordan curves, so that the integrals are well-defined.
- Stewart, James (2010). Essential Calculus: Early Transcendentals. Cole. https://books.google.com/books?id=btIhvKZCkTsC&pg=PA786.
- Robert Scheichl, lecture notes for University of Bath mathematics course [3]
- Colley, Susan Jane (2002). Vector Calculus (4th ed.). Boston: Pearson.
- Edwards, Harold M. (1994). Advanced Calculus: A Differential Forms Approach. Birkhäuser. ISBN 0-8176-3707-9.
- Conlon, Lawrence (2008). Differentiable Manifolds. Modern Birkhauser Classics. Boston: Birkhaeuser. https://books.google.com/books?id=r2K31Pz5EGcC&pg=PA194.
- Atsuo Fujimoto;"Vector-Kai-Seki Gendai su-gaku rekucha zu. C(1)" Bai-Fu-Kan(jp)(1979/01) ISBN:978-4563004415 [2] (Written in Japanese)
- There do exist textbooks that use the terms "homotopy" and "homotopic" in the sense of Theorem 2-1.[5] Indeed, this is very convenient for the specific problem of conservative forces. However, both uses of homotopy appear sufficiently frequently that some sort of terminology is necessary to disambiguate, and the term "tubular homotopy" adopted here serves well enough for that end.
- Lee, John M. (2002). Introduction to Smooth Manifolds. Graduate Texts in Mathematics. 218. Springer. https://books.google.com/books?id=xygVcKGPsNwC&pg=PA421.
- L. S. Pontryagin, Smooth manifolds and their applications in homotopy theory, American Mathematical Society Translations, Ser. 2, Vol. 11, American Mathematical Society, Providence, R.I., 1959, pp. 1–114. MR0115178 (22 #5980 [4]). See theorems 7 & 8. https://mathscinet.ams.org/mathscinet-getitem?mr=0115178

