 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Pablo Gonzalez-De-Santos | + 1005 word(s) | 1005 | 2020-11-18 11:58:32 | | | |
| 2 | Karina Chen | + 86 word(s) | 1091 | 2020-11-20 11:31:33 | | |
Video Upload Options
Field robots for use in intelligent farms can be of two types: mobile robots, capable of moving throughout the working field, and manipulators, normally attached to mobile robots and capable of performing some types of actions on crops. Mobile robots can be unmanned ground robots or unmanned aerial robots, whereas manipulators can follow diverse techniques that provide different characteristics: (1) rigid manipulators; (2) soft manipulators; (3) parallel robots; (4) dual-arm manipulators; (5) redundant, hyperredundant, or continuum manipulators; etc
1. Definition
Estimations of world population growth urgently require improving the efficiency of agricultural processes, as well as improving safety for people and environmental sustainability, which can be opposing characteristics. Industry is pursuing these objectives by developing the concept of the “intelligent factory” (also referred to as the “smart factory”) and, by studying the similarities between industry and agriculture, we can exploit the achievements attained in industry for agriculture. This article focuses on studying those similarities regarding robotics to advance agriculture toward the concept of “intelligent farms” (smart farms).
2. Introduction
According to the Food and Agriculture Organization (FAO), the world’s human inhabitants are expected to reach 9.6 billion people by 2050. Feeding this huge population is largely considered one of the greatest outstanding challenges in terms of human initiatives. Cultivated land is close to its maximum in developed countries, and as predicted by the European Agricultural Machinery Association (CEMA) [1]—the association representing the European agricultural machinery industry—food production must increase by 70% to successfully feed the human population circa 2050. This mission demands more efficient infrastructure, farms, and production devices capable of preserving resources in a sustainable, environmentally friendly, and cost-effective manner.
The precision farming concept, which consists of assembling different methods and techniques to manage variations in the field to increase crop productivity, improve business profitability, and ensure eco-environmental sustainability, has provided some significant solutions. After more than three decades of development, the basic technologies on which precision farming was constructed are becoming mature enough to aid in accomplishing this mission. Figure 1 illustrates some of these techniques along with their connections, distinguishing those based on information and communication technologies (ICT) from those that rely on field robotics [2][3][4][5][6][7].
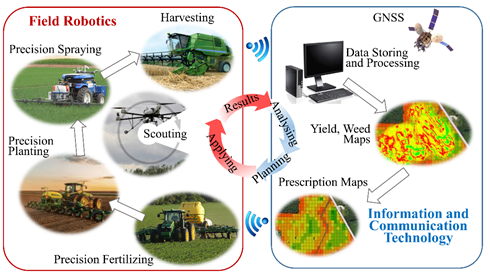
Figure 1. Technologies involved in precision agriculture.
Currently, agricultural activities involving robotics exhibit a high degree of technology and are capable of performing autonomous tasks. Most of these tasks are related to harvesting and weeding, followed by the disease detection and seeding, according to a recent study on research and commercial agricultural robots for field operations [8]. For example, fertilization-spreading tasks can be executed autonomously if the appropriate implement tanks have been filled with fertilizer and attached to fueled autonomous vehicles, but only until the system has run out of fertilizer or fuel. Then, human operators have to participate in refilling and refueling/recharging. The same concept is applicable to planting and spraying.
3. Approach to the Intelligent Farm Concept
Intelligent factories depend on the strong combination of five concepts: (1) artificial intelligence, (2) cyber-physical systems (CPSs), (3) the Internet of Things (IoT), (4) Big Data, and (5) cloud computing. Intelligent farms should also be based on these principles to reduce the traditional delays in applying new technologies to agriculture with respect to their application in industry. These concepts are introduced in the following paragraphs.
3.1. Artificial Intelligence
Currently, there is not a widely accepted definition for artificial intelligence (AI) [9], but “the capability of a machine (usually a computer) to imitate intelligent human behavior” gives insight on the meaning of the term. AI already has an intensive use in robotics, specifically in navigation of mobile robots [10], but also has a potential in factories: quality checking, prediction of failures, predictive maintenance, digital twins, analysis of environmental impact, use of data, etc., which can be used in farms for similar purposes. A thorough revision of AI in factories is summarized in[11].
3.2. Cyber-Physical Systems
A cyber-physical system is an integration of computation in physical processes. Computation consists of embedded hardware and communication networks that monitor and control the physical processes in closed loop [12]. Therefore, a CPS consists of the process itself, hardware, and software. The embedded hardware forms the physical device and the software is considered as the virtual device. The physical device is formed by sensors, controllers, computers, data acquisition devices, communication network, etc. The virtual device consists of mathematical models that represent the behavior of the physical device and the relevant control algorithms (See Figure 2).
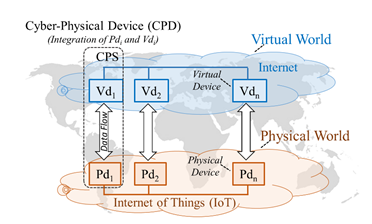
Figure 2. Cyber-physical systems and the Internet of Things.
3.3. The Internet of Things
The IoT is a computing concept that has not yet been precisely defined to describe how physical objects can be connected to the Internet and identified by other devices. This communication is made through sensor and wireless technologies as well as by RFID (radio frequency identification) and QR (quick response) codes. In CPSs, the physical devices are connected through the IoT, while the virtual devices are connected through the Internet, as illustrated in Figure 2 [13].
3.4. Big Data
Although there is not a unified definition for Big Data, this term refers to the enormous amount of data currently available in many disciplines, making efficient analyses using conventional data processing techniques difficult. These data can be in the form of texts, geometries, images, videos, sounds, and geospatial information and are (1) available on the Internet, (2) provided by public institutions, or (3) collected with mechanisms based on the IoT. Big Data refers to collecting, storing, analyzing, searching, sharing, transferring, and visualizing data of processes to obtain relevant information[14][13][15].
3.5. Cloud Computing
Managing big datasets requires special computing and storing tools, and cloud computing techniques provide comfortable, fast, economical, and secure mechanisms for doing so. Cloud computing is defined by The National Institute of Standards and Technology as “a model for enabling convenient, on-demand network access to a shared pool of configurable computing resources—e.g., networks, servers, storage applications and services—that can be rapidly provisioned and released with minimal management effort or service provider interaction” [16].
A cloud computing solution can be implemented as (1) a public cloud where the access is provided via interfaces in a pay-per-use procedure; (2) a private cloud, which is similar to an organization’s Intranet; and (3) a hybrid cloud, which combines public and private cloud features [17].
Cloud providers operate hardware and software computing infrastructures to provide services to demanding users over the Internet offering three types of services: software as a service (SaaS), platform as a service (PaaS), and infrastructure as a service (IaaS) [17].
Figure 3 sketches the concepts of an intelligent factory (left) and an intelligent farm (right), showing the common elements (center).
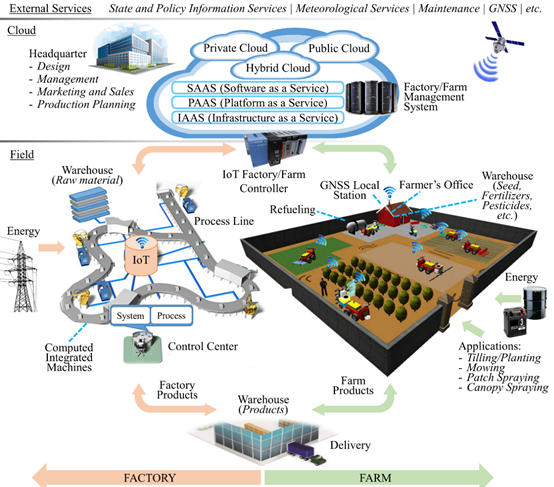
Figure 3. Smart factory (left) and smart farm (right) with their common elements (center).
References
- CEMA. European Agricultural Machinery. Available online: https://www.cema-agri.org/ (accessed on 2 July 2020).
- Pflanz, M.; Nordmeyer, H.; Schirrmann, M. Weed Mapping with UAS Imagery and a Bag of Visual Words Based Image Classifier. Remote Sens. 2018, 10, 1530. [Google Scholar] [CrossRef]
- Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Appl. Sci. 2020, 10, 7132. [Google Scholar] [CrossRef]
- Hu, J.; Wang, T.; Yang, J.; Lan, Y.; Lv, S.; Zhang, Y. WSN-Assisted UAV Trajectory Adjustment for Pesticide Drift Control. Sensors 2020, 20, 5473. [Google Scholar] [CrossRef] [PubMed]
- Suardi, A.; Stefanoni, W.; Alfano, V.; Bergonzoli, S.; Pari, L. Equipping a Combine Harvester with Turbine Technology Increases the Recovery of Residual Biomass from Cereal Crops via the Collection of Chaff. Energies 2020, 13, 1572. [Google Scholar] [CrossRef]
- Gonzalez-De-Soto, M.; Emmi, L.; Perez-Ruiz, M.; Agüera, J.; Gonzalez-De-Santos, P. Autonomous systems for precise spraying—Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 165–182. [Google Scholar] [CrossRef]
- Gonzalez-De-Soto, M.; Emmi, L.; Garcia, I.; Gonzalez-De-Santos, P. Reducing fuel consumption in weed and pest control using robotic tractors. Comput. Electron. Agric. 2015, 114, 96–113. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Santos, C.H.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Wang, P. On Defining Artificial Intelligence. J. Artif. Gen. Intell. 2019, 10, 1–37. [Google Scholar] [CrossRef]
- Nirmala, G.; Geetha, S.; Selvakumar, S. Mobile Robot Localization and Navigation in Artificial Intelligence: Survey. Comput. Methods Soc. Sci. 2017, IV, 12–22. Available online: http://cmss.univnt.ro/wp-content/uploads/vol/split/vol_IV_issue_2/CMSS_vol_IV_issue_2_art.002.pdf (accessed on 2 July 2020).
- Li, B.-H.; Hou, B.-C.; Yu, W.-T.; Lu, X.-B.; Yang, C.-W. Applications of artificial intelligence in intelligent manufacturing: A review. Front. Inf. Technol. Electron. Eng. 2017, 18, 86–96. [Google Scholar] [CrossRef]
- Lee, E.A. Cyber Physical Systems: Design Challenges. In Proceedings of the 11th IEEE International Symposium on Object and Component-Oriented Real-Time Distributed Computing (ISORC), Orlando, FL, USA, 5–7 May 2008; pp. 363–369. [Google Scholar]
- Ochoa, S.F.; Fortino, G.; Di Fatta, G. Cyber-physical systems, internet of things and big data. Futur. Gener. Comput. Syst. 2017, 75, 82–84. [Google Scholar] [CrossRef]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.-J. Big Data in Smart Farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Bordel, B.; Alcarria, R.; Robles, T.; Martín, D. Cyber–physical systems: Extending pervasive sensing from control theory to the Internet of Things. Pervasive Mob. Comput. 2017, 40, 156–184. [Google Scholar] [CrossRef]
- Mell, P.; Grance, T. The NIST Definition of Cloud Computing, Version 15, 10-7-09. National Institute of Standards and Technology. Information Technology Laboratory. Available online: https://csrc.nist.gov/publications/detail/sp/800-145/final (accessed on 2 July 2020).
- Jadeja, Y.; Modi, K. Cloud computing—concepts, architecture and challenges. In Proceedings of the 2012 International Conference on Computing, Electronics and Electrical Technologies (ICCEET), Kumaracoil, India, 21–22 March 2012; pp. 877–880. [Google Scholar]

