 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Vivi Li | -- | 1008 | 2022-10-24 01:45:00 |
Video Upload Options
An H bridge is an electronic circuit that switches the polarity of a voltage applied to a load. These circuits are often used in robotics and other applications to allow DC motors to run forwards or backwards. Most DC-to-AC converters (power inverters), most AC/AC converters, the DC-to-DC push–pull converter, most motor controllers, and many other kinds of power electronics use H bridges. In particular, a bipolar stepper motor is almost invariably driven by a motor controller containing two H bridges.
1. General
H bridges are available as integrated circuits, or can be built from discrete components.[1]
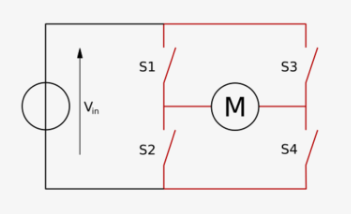
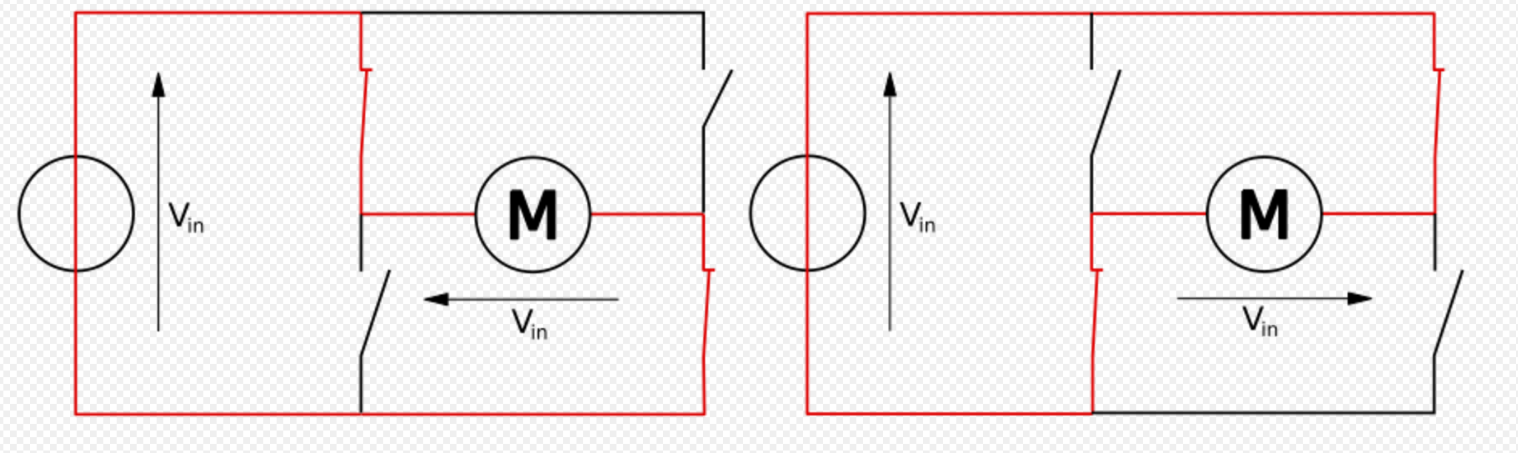
The term H bridge is derived from the typical graphical representation of such a circuit. An H bridge is built with four switches (solid-state or mechanical). When the switches S1 and S4 (according to the first figure) are closed (and S2 and S3 are open) a positive voltage will be applied across the motor. By opening S1 and S4 switches and closing S2 and S3 switches, this voltage is reversed, allowing reverse operation of the motor.
Using the nomenclature above, the switches S1 and S2 should never be closed at the same time, as this would cause a short circuit on the input voltage source. The same applies to the switches S3 and S4. This condition is known as shoot-through.
2. Operation
The H-bridge arrangement is generally used to reverse the polarity/direction of the motor, but can also be used to 'brake' the motor, where the motor comes to a sudden stop, as the motor's terminals are shorted, or to let the motor 'free run' to a stop, as the motor is effectively disconnected from the circuit. The following table summarises operation, with S1-S4 corresponding to the diagram above.
| S1 | S2 | S3 | S4 | Result |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Motor moves right |
| 0 | 1 | 1 | 0 | Motor moves left |
| 0 | 0 | 0 | 0 | Motor coasts |
| 1 | 0 | 0 | 0 | |
| 0 | 1 | 0 | 0 | |
| 0 | 0 | 1 | 0 | |
| 0 | 0 | 0 | 1 | |
| 0 | 1 | 0 | 1 | Motor brakes |
| 1 | 0 | 1 | 0 | |
| x | x | 1 | 1 | Short circuit |
| 1 | 1 | x | x |
3. Construction
3.1. Relays
One way to build an H bridge is to use an array of relays from a relay board.[2]
A "double pole double throw" (DPDT) relay can generally achieve the same electrical functionality as an H bridge (considering the usual function of the device). However a semiconductor-based H bridge would be preferable to the relay where a smaller physical size, high speed switching, or low driving voltage (or low driving power) is needed, or where the wearing out of mechanical parts is undesirable.
Another option is to have a DPDT relay to set the direction of current flow and a transistor to enable the current flow. This can extend the relay life, as the relay will be switched while the transistor is off and thereby there is no current flow. It also enables the use of PWM switching to control the current level.
3.2. N and P Channel Semiconductors
A solid-state H bridge is typically constructed using opposite polarity devices, such as PNP bipolar junction transistors (BJT) or P-channel MOSFETs connected to the high voltage bus and NPN BJTs or N-channel MOSFETs connected to the low voltage bus.
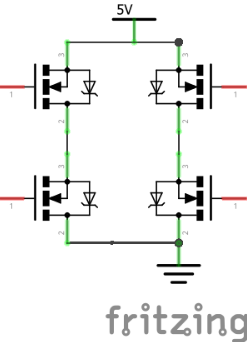
3.3. N Channel-Only Semiconductors
The most efficient MOSFET designs use N-channel MOSFETs on both the high side and low side because they typically have a third of the ON resistance of P-channel MOSFETs. This requires a more complex design since the gates of the high side MOSFETs must be driven positive with respect to the DC supply rail. Many integrated circuit MOSFET gate drivers include a charge pump within the device to achieve this.
Alternatively, a switched-mode power supply DC–DC converter can be used to provide isolated ('floating') supplies to the gate drive circuitry. A multiple-output flyback converter is well-suited to this application.
Another method for driving MOSFET-bridges is the use of a specialised transformer known as a GDT (gate drive transformer), which gives the isolated outputs for driving the upper FETs gates. The transformer core is usually a ferrite toroid, with 1:1 or 4:9 winding ratio. However, this method can only be used with high frequency signals. The design of the transformer is also very important, as the leakage inductance should be minimized, or cross conduction may occur. The outputs of the transformer are usually clamped by Zener diodes, because high voltage spikes could destroy the MOSFET gates.
3.4. Variants
A common variation of this circuit uses just the two transistors on one side of the load, similar to a class AB amplifier. Such a configuration is called a "half bridge".[3] The half bridge is used in some switched-mode power supplies that use synchronous rectifiers and in switching amplifiers. The half-H bridge type is commonly abbreviated to "Half-H" to distinguish it from full ("Full-H") H bridges. Another common variation, adding a third 'leg' to the bridge, creates a three-phase inverter. The three-phase inverter is the core of any AC motor drive.
A further variation is the half-controlled bridge, where the low-side switching device on one side of the bridge, and the high-side switching device on the opposite side of the bridge, are each replaced with diodes. This eliminates the shoot-through failure mode, and is commonly used to drive variable or switched reluctance machines and actuators where bi-directional current flow is not required.
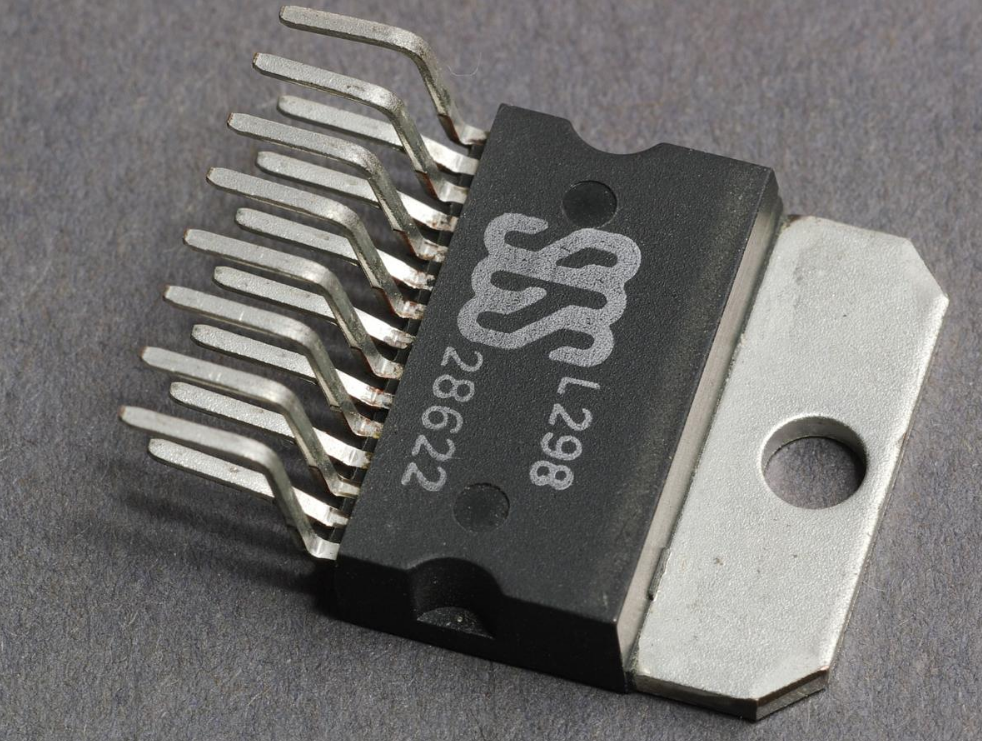
3.5. Commercial Availability
There are many commercially available inexpensive single and dual H-bridge packages, of which the L293x series includes the most common ones. Few packages, like L9110,[4] have built-in flyback diodes for back EMF protection.
4. Operation as an Inverter
A common use of the H bridge is an inverter. The arrangement is sometimes known as a single-phase bridge inverter.
The H bridge with a DC supply will generate a square wave voltage waveform across the load. For a purely inductive load, the current waveform would be a triangle wave, with its peak depending on the inductance, switching frequency, and input voltage.
References
- Al Williams (2002). Microcontroller projects using the Basic Stamp (2nd ed.). Focal Press. p. 344. ISBN 978-1-57820-101-3. https://books.google.com/books?id=E0_07GfXo2wC&pg=PA344.
- "Relay H-bridge (Relay Motor controller)". 11 December 2012. http://nvhs.wordpress.com/project/catspberry/motor-controller/.
- ""The Half-bridge Circuit Revealed (2012)". http://www.powerguru.org/the-half-bridge-circuit-revealed/.
- "wordpress.com". http://nvhs.files.wordpress.com/2013/02/datasheet-l9110.pdf.

