 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Jason Zhu | -- | 4770 | 2022-10-08 05:39:03 |
Video Upload Options
The Minkowski diagram, also known as a spacetime diagram, was developed in 1908 by Hermann Minkowski and provides an illustration of the properties of space and time in the special theory of relativity. It allows a qualitative understanding of the corresponding phenomena like time dilation and length contraction without mathematical equations. Minkowski diagrams are two-dimensional graphs that depict events as happening in a universe consisting of one space dimension and one time dimension. Unlike a regular distance-time graph, the distance is displayed on the horizontal axis and time on the vertical axis. Additionally, the time and space units of measurement are chosen in such a way that an object moving at the speed of light is depicted as following a 45° angle to the diagram's axes. In this way, each object, like an observer or a vehicle, traces a certain line in the diagram, which is called its world line. Also, each point in the diagram represents a certain position in space and time, and is called an event, regardless of whether anything relevant happens there and then.
1. Basics
1.1. Position Versus Time Graphs
In the study of 1-dimensional kinematics, position vs. time graphs (also called distance vs. time graphs, or p-t graphs) provide a useful means to describe motion. The specific features of the motion of objects are demonstrated by the shape and the slope of the lines.[1] In the accompanying figure, the plotted object moves away from the origin at a uniform speed of 1.66 m/s for six seconds, halts for five seconds, then returns to the origin over a period of seven seconds at a non-constant speed.
1.2. Spacetime diagrams
At its most basic level, a spacetime diagram is merely a time vs position graph, with the directions of the axes in a usual p-t graph exchanged, that is, the vertical axis refers to temporal and the horizontal axis to spatial coordinate values. Especially when used in special relativity (SR), the temporal axes of a spacetime diagram are scaled with the speed of light c, and thus are often labeled by ct. This changes the dimension of the addressed physical quantity from <Time> to <Length>, in accordance to the dimension associated to the spatial axes, which are frequently labeled x.
1.3. Standard configuration
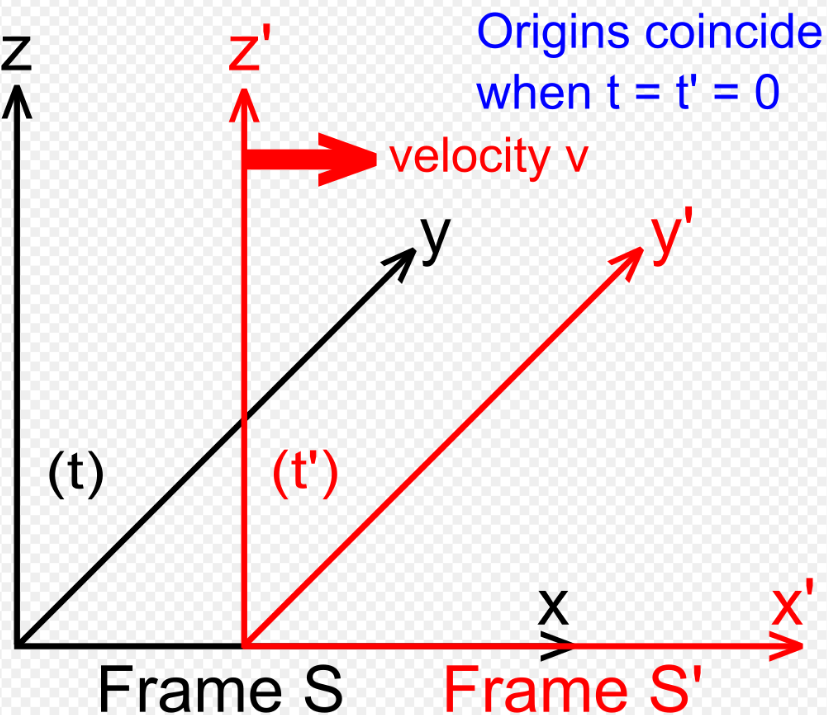
To ease insight in how spacetime coordinates, measured by observers in different reference frames, compare with each other, it is useful to work with a simplified setup. With care, this allows simplification of the math with no loss of generality in the conclusions that are reached. Setting the temporal component aside for the moment, two Galilean reference frames (i.e. conventional 3-space frames), S and S' (pronounced "S prime"), each with observers O and O' at rest in their respective frames, but measuring the other as moving with speeds ±v are said to be in standard configuration, when:
- The x, y, z axes of frame S are oriented parallel to the respective primed axes of frame S′.
- Frame S′ moves in the x-direction of frame S with a constant velocity v as measured in frame S.
- The origins of frames S and S′ coincide for time t = 0 in frame S and t′ = 0 in frame S′.[2]:107
This spatial setting is displayed in the accompanying figure, in which the temporal coordinates are separately annotated as quantities t and t'.
In a further step of simplification it is often possible to consider just the direction of the observed motion and ignore the other two spatial components, allowing x and ct to be plotted in 2-dimensional spacetime diagrams, as introduced above.
1.4. Minkowski Diagrams
The term Minkowski diagram refers to a specific form of spacetime diagram frequently used in special relativity. The term is used in both a generic and particular sense. In general, a Minkowski diagram is a two-dimensional graphical depiction of a portion of Minkowski space, usually where space has been curtailed to a single dimension. The units of measurement in these diagrams are taken such that the light cone at an event consists of the lines of slope plus or minus one through that event.[3] The horizontal lines correspond to the usual notion of simultaneous events for a stationary observer at the origin.
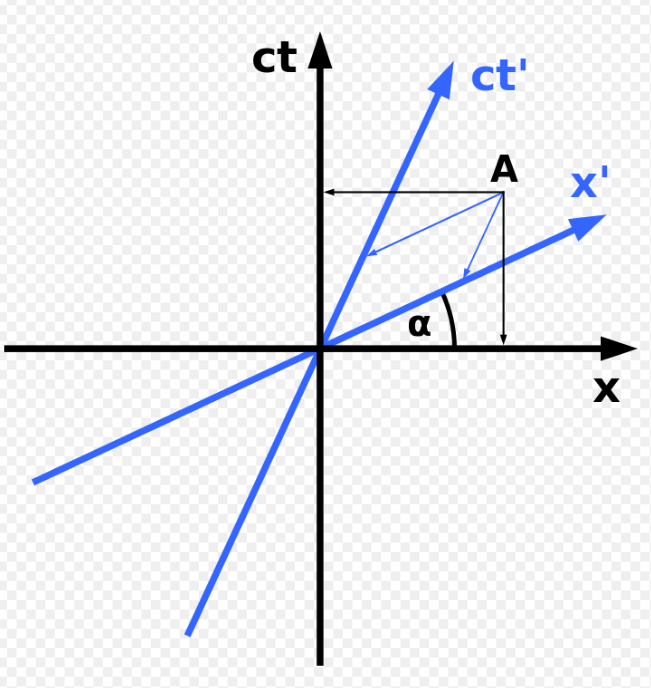
A particular Minkowski diagram illustrates the result of a Lorentz transformation. The Lorentz transformation relates two inertial frames of reference, where an observer stationary at the event (0, 0) makes a change of velocity along the x-axis. The new time axis of the observer forms an angle α with the previous time axis, with α < π/4. In the new frame of reference the simultaneous events lie parallel to a line inclined by α to the previous lines of simultaneity. This is the new x-axis. Both the original set of axes and the primed set of axes have the property that they are orthogonal with respect to the Minkowski inner product or relativistic dot product.
Whatever the magnitude of α, the line t = x forms the universal[4] bisector.
The space and time units of measurement on the axes may, for example, be taken as one of the following pairs:
- Units of ~30 centimetres length and nanoseconds
- Astronomical units and intervals of about 8 minutes and 19 seconds (499 seconds)
- Light years and years
- Light-second and second
This way, light paths are represented by lines parallel to the bisector between the axes.
2. Spacetime Diagrams in Newtonian Physics
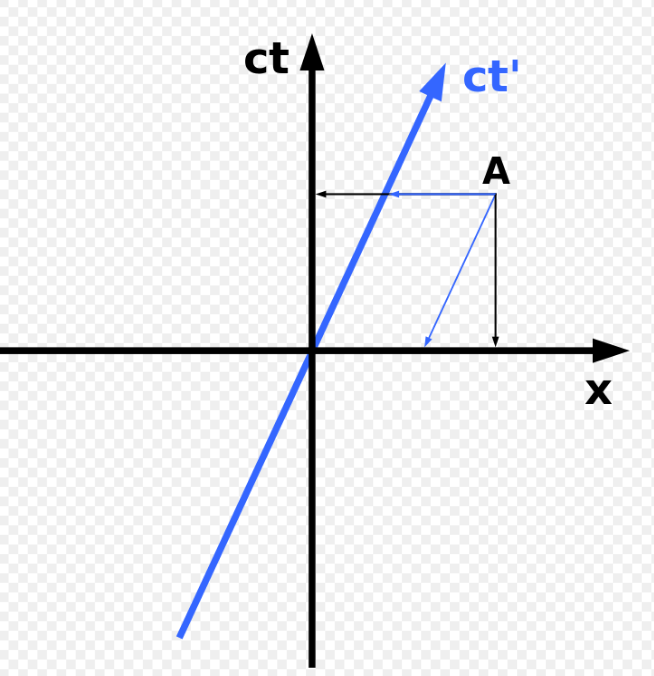
The black axes labelled x and ct on the adjoining diagram are the coordinate system of an observer, referred to as 'at rest', and who is positioned at x = 0. This observer's world line is identical with the ct time axis. Each parallel line to this axis would correspond also to an object at rest but at another position. The blue line describes an object moving with constant speed v to the right, such as a moving observer.
This blue line labelled ct′ may be interpreted as the time axis for the second observer. Together with the x axis, which is identical for both observers, it represents their coordinate system. Since the reference frames are in standard configuration, both observers agree on the location of the origin of their coordinate systems. The axes for the moving observer are not perpendicular to each other and the scale on their time axis is stretched. To determine the coordinates of a certain event, two lines, each parallel to one of the two axes, must be constructed passing through the event, and their intersections with the axes read off.
Determining position and time of the event A as an example in the diagram leads to the same time for both observers, as expected. Only for the position different values result, because the moving observer has approached the position of the event A since t = 0. Generally stated, all events on a line parallel to the x axis happen simultaneously for both observers. There is only one universal time t = t′, modelling the existence of one common position axis. On the other hand, due to two different time axes the observers usually measure different coordinates for the same event. This graphical translation from x and t to x′ and t′ and vice versa is described mathematically by the so-called Galilean transformation.
3. Minkowski Diagrams in Special Relativity
In 1905, Albert Einstein discovered that the Newtonian description is wrong,[5] with Hermann Minkowski in 1908 providing the graphical representation.[6] Space and time have properties which lead to different rules for the translation of coordinates in case of moving observers. In particular, events which are estimated to happen simultaneously from the viewpoint of one observer, happen at different times for the other.
In the Minkowski diagram this relativity of simultaneity corresponds with the introduction of a separate [math]\displaystyle{ x' }[/math] for the moving observer. Following the rule described above, each observer interprets all events on a line parallel to his [math]\displaystyle{ x }[/math] or [math]\displaystyle{ x' }[/math] axis as simultaneous. The sequence of events from the viewpoint of an observer can be illustrated graphically by shifting this line in the diagram from bottom to top.
If ct instead of t is assigned on the time axes, the angle α between the x and x′ axes will be identical with that between the time axes ct and ct′. This follows from the second postulate of special relativity, which says that the speed of light is the same for all observers, regardless of their relative motion (see below). The angle α is given by[7]
- [math]\displaystyle{ \tan(\alpha)=\frac{v}{c}=\beta }[/math].
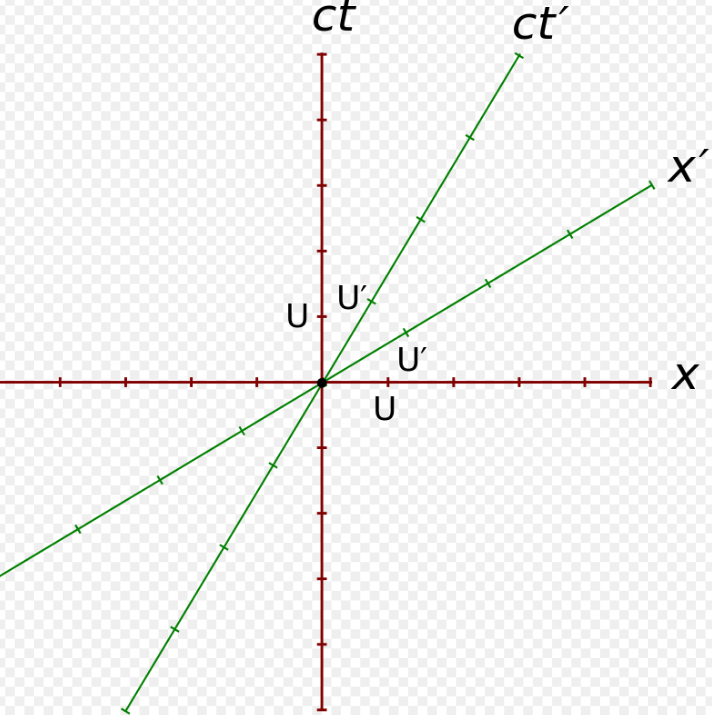
The corresponding translation from x and t to x′ and t′ and vice versa is described mathematically by the Lorentz transformation, which is [math]\displaystyle{ ct' = \gamma (ct-\beta x) }[/math] and [math]\displaystyle{ x' = \gamma (x-vt) }[/math] where [math]\displaystyle{ \gamma = \frac{1}{\sqrt{1-\beta^2}} }[/math]. On the x′ axis, t′ = 0, so [math]\displaystyle{ t = \beta x/c }[/math] or [math]\displaystyle{ x = ct/\beta }[/math]. Substituting for x or t in x′ gives [math]\displaystyle{ x' = \gamma (ct/\beta - vt) }[/math] or [math]\displaystyle{ x' = \gamma(x - v\beta x/c) }[/math]. Equating these two expressions along x′ gives [math]\displaystyle{ \gamma (1-\beta^2)ct/\beta = \gamma(1-\beta^2)x }[/math]. This implies that the slope of x′ is [math]\displaystyle{ \frac{\Delta ct}{\Delta x} = \beta = \tan(\alpha) }[/math]. Whatever space and time axes arise through such transformation, in a Minkowski diagram they correspond to conjugate diameters of a pair of hyperbolas. The scales on the axes are given as follows: If U is the unit length on the axes of ct and x respectively, the unit length on the axes of ct′ and x′ is:[8]
- [math]\displaystyle{ U'=U\cdot\sqrt\frac{1+\beta^2}{1-\beta^2}\,. }[/math]
The ct-axis represents the worldline of a clock resting in S, with U representing the duration between two events happening on this worldline, also called the proper time between these events. Length U upon the x-axis represents the rest length or proper length of a rod resting in S. The same interpretation can also be applied to distance U′ upon the ct′- and x′-axes for clocks and rods resting in S′.
3.1. History
In Minkowski's 1908 paper there were three diagrams, first to illustrate the Lorentz transformation, then the partition of the plane by the light-cone, and finally illustration of worldlines.[6] The first diagram used a branch of the unit hyperbola [math]\displaystyle{ t^2 - x^2 = 1 }[/math] to show the locus of a unit of proper time depending on velocity, thus illustrating time dilation. The second diagram showed the conjugate hyperbola to calibrate space, where a similar stretching leaves the impression of FitzGerald contraction. In 1914 Ludwik Silberstein[9] included a diagram of "Minkowski’s representation of the Lorentz transformation". This diagram included the unit hyperbola, its conjugate, and a pair of conjugate diameters. Since the 1960s a version of this more complete configuration has been referred to as The Minkowski Diagram, and used as a standard illustration of the transformation geometry of special relativity. E. T. Whittaker has pointed out that the principle of relativity is tantamount to the arbitrariness of what hyperbola radius is selected for time in the Minkowski diagram. In 1912 Gilbert N. Lewis and Edwin B. Wilson applied the methods of synthetic geometry to develop the properties of the non-Euclidean plane that has Minkowski diagrams.[10][11]
4. Loedel Diagram
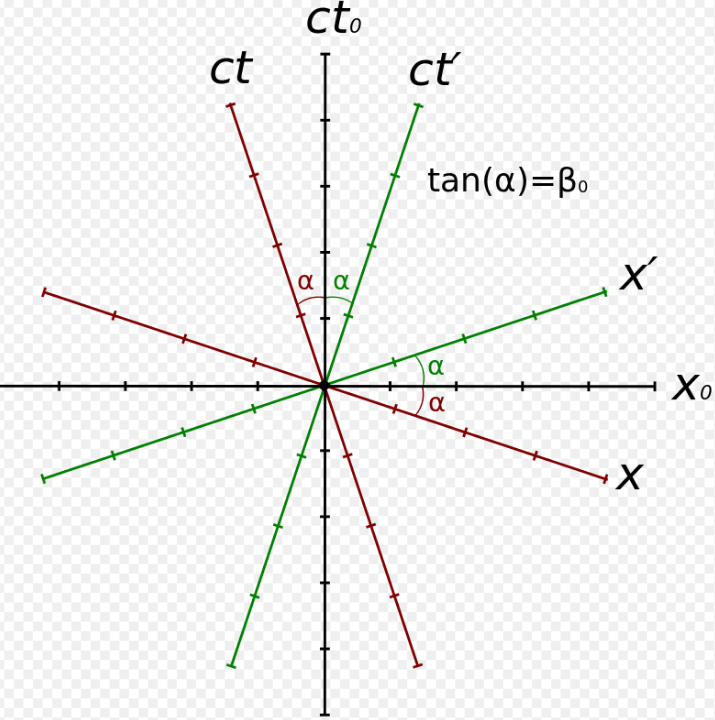
While the rest frame has space and time axes at right angles, the moving frame has primed axes which form an acute angle. Since the frames are meant to be equivalent, the asymmetry may be disturbing. However, several authors showed that there is a frame of reference between the resting and moving ones where their symmetry would be apparent ("median frame").[12] In this frame, the two other frames are moving in opposite directions with equal speed. Using such coordinates makes the units of length and time the same for both axes. If β = v/c and γ = 1/√1 − β2 is given between S and S′, then these expressions are connected with the values in their median frame S0 as follows:[12][13]
- [math]\displaystyle{ \begin{align} (1) & & \beta & =\frac{2\beta_0}{1+{\beta_0}^2},\\ (2) & & \beta_{0} & =\frac{\gamma-1}{\beta\gamma}. \end{align} }[/math]
For instance, if β = 0.5 between S and S′, then by (2) they are moving in their median frame S0 with approximately ±0.268c each in opposite directions. On the other hand, if β0 = 0.5 in S0, then by (1) the relative velocity between S and S′ in their own rest frames is 0.8c. The construction of the axes of S and S′ is done in accordance with the ordinary method using tan α = β0 with respect to the orthogonal axes of the median frame (Fig. 1).
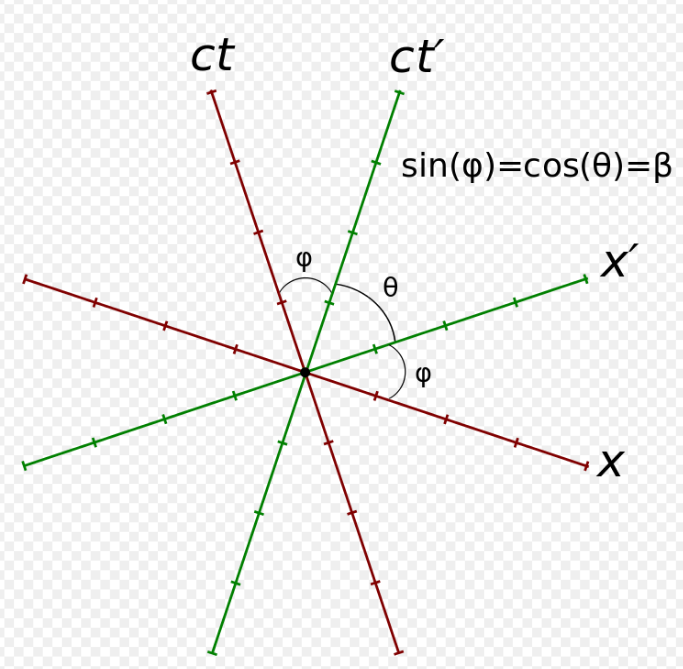
However, it turns out that, when drawing such a symmetric diagram, it is possible to derive the diagram's relations even without mentioning the median frame and β0 at all. Instead, the relative velocity β = v/c between S and S′ can directly be used in the following construction, providing the same result:[14] If φ is the angle between the axes of ct′ and ct (or between x and x′), and θ between the axes of x′ and ct′, it is given:[14][15][16][17]
- [math]\displaystyle{ \begin{align} \sin\varphi=\cos\theta & =\beta,\\ \cos\varphi=\sin\theta & =\frac{1}{\gamma},\\ \tan\varphi=\cot\theta & =\beta\cdot\gamma. \end{align} }[/math]
Two methods of construction are obvious from Fig. 2: (a) The x-axis is drawn perpendicular to the ct′-axis, the x′ and ct-axes are added at angle φ; (b) the x′-axis is drawn at angle θ with respect to the ct′-axis, the x-axis is added perpendicular to the ct′-axis and the ct-axis perpendicular to the x′-axis.
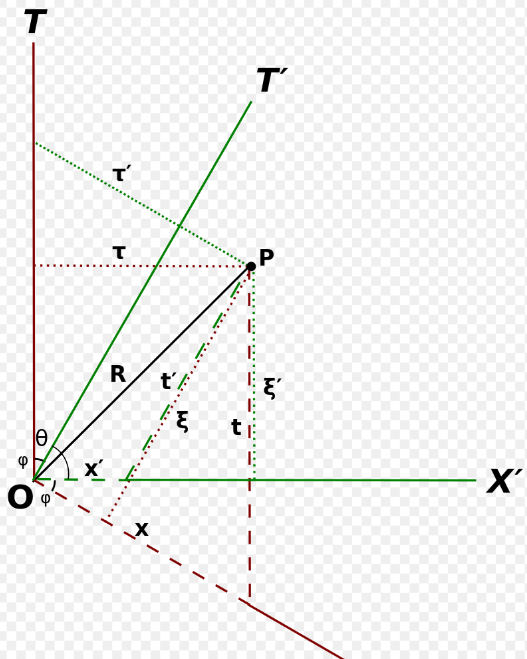
Also the components of a vector can be vividly demonstrated by such diagrams (Fig. 3): The parallel projections (x, t; x′ ,t′) of vector R are its contravariant components, (ξ, τ; ξ′, τ′) its covariant components.[15][16]
4.1. History
- Max Born (1920) drew Minkowski diagrams by placing the ct′-axis almost perpendicular to the x-axis, as well as the ct-axis to the x′-axis, in order to demonstrate length contraction and time dilation in the symmetric case of two rods and two clocks moving in opposite direction.[18]
- Dmitry Mirimanoff (1921) showed that there is always a median frame with respect to two relatively moving frames, and derived the relations between them from the Lorentz transformation. However, he didn't give a graphical representation in a diagram.[12]
- Symmetric diagrams were systematically developed by Paul Gruner in collaboration with Josef Sauter in two papers in 1921. Relativistic effects such as length contraction and time dilation and some relations to covariant and contravariant vectors were demonstrated by them.[15][16] Gruner extended this method in subsequent papers (1922-1924), and gave credit to Mirimanoff's treatment as well.[19][20][21][22][23][24]
- The construction of symmetric Minkowski diagrams was later independently rediscovered by several authors. For instance, starting in 1948, Enrique Loedel Palumbo published a series of papers in Spanish language, presenting the details of such an approach.[25][26] In 1955, Henri Amar also published a paper presenting such relations, and gave credit to Loedel in a subsequent paper in 1957.[27][28] Some authors of textbooks use symmetric Minkowski diagrams, denoting as Loedel diagrams.[14][17]
5. Time Dilation
Relativistic time dilation means that a clock (indicating its proper time) that moves relative to an observer is observed to run slower. In fact, time itself in the frame of the moving clock is observed to run slower. This can be read immediately from the adjoining Loedel diagram quite straightforwardly because unit lengths in the two system of axes are identical. Thus, in order to compare reading between the two systems, we can simply compare lengths as they appear on the page: we do not need to consider the fact that unit lengths on each axis are warped by the factor
- [math]\displaystyle{ \sqrt\frac{1+\beta^2}{1-\beta^2}\,, }[/math]
which we would have to account for in the corresponding Minkowski diagram.
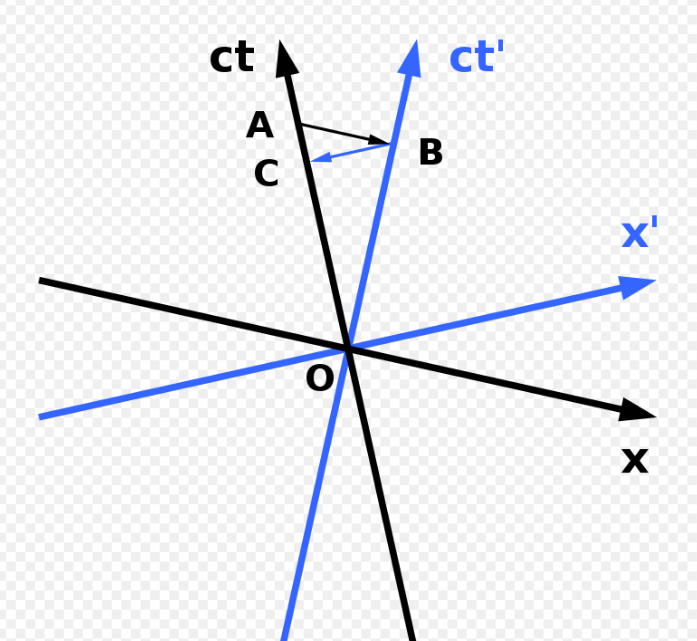
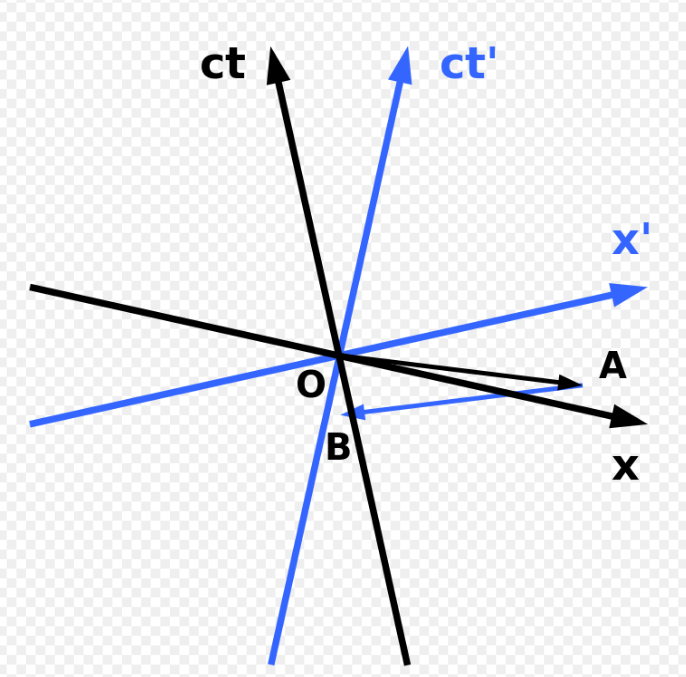
The observer whose reference frame is given by the black axes is assumed to move from the origin O towards A. The moving clock has the reference frame given by the blue axes and moves from O to B. For the black observer, all events happening simultaneously with the event at A are located on a straight line parallel to its space axis. This line passes through A and B, so A and B are simultaneous from the reference frame of the observer with black axes. However, the clock that is moving relative to the black observer marks off time along the blue time axis. This is represented by the distance from O to B. Therefore, the observer at A with the black axes notices their clock as reading the distance from O to A while they observe the clock moving relative him or her to read the distance from O to B. Due to the distance from O to B being smaller than the distance from O to A, they conclude that the time passed on the clock moving relative to them is smaller than that passed on their own clock.
A second observer, having moved together with the clock from O to B, will argue that the other clock has reached only C until this moment and therefore this clock runs slower. The reason for these apparently paradoxical statements is the different determination of the events happening synchronously at different locations. Due to the principle of relativity, the question of who is right has no answer and does not make sense.
6. Length Contraction
Relativistic length contraction means that the proper length of an object moving relative to an observer is decreased and finally also the space itself is contracted in this system. The observer is assumed again to move along the ct-axis. The world lines of the endpoints of an object moving relative to him are assumed to move along the ct′-axis and the parallel line passing through A and B. For this observer the endpoints of the object at t = 0 are O and A. For a second observer moving together with the object, so that for him the object is at rest, it has the proper length OB at t′ = 0. Due to OA < OB. the object is contracted for the first observer.
The second observer will argue that the first observer has evaluated the endpoints of the object at O and A respectively and therefore at different times, leading to a wrong result due to his motion in the meantime. If the second observer investigates the length of another object with endpoints moving along the ct-axis and a parallel line passing through C and D he concludes the same way this object to be contracted from OD to OC. Each observer estimates objects moving with the other observer to be contracted. This apparently paradoxical situation is again a consequence of the relativity of simultaneity as demonstrated by the analysis via Minkowski diagram.
For all these considerations it was assumed, that both observers take into account the speed of light and their distance to all events they see in order to determine the actual times at which these events happen from their point of view.
7. Constancy of the Speed of Light
Another postulate of special relativity is the constancy of the speed of light. It says that any observer in an inertial reference frame measuring the vacuum speed of light relative to themself obtains the same value regardless of his own motion and that of the light source. This statement seems to be paradoxical, but it follows immediately from the differential equation yielding this, and the Minkowski diagram agrees. It explains also the result of the Michelson–Morley experiment which was considered to be a mystery before the theory of relativity was discovered, when photons were thought to be waves through an undetectable medium.
For world lines of photons passing the origin in different directions x = ct and x = −ct holds. That means any position on such a world line corresponds with steps on x- and ct-axes of equal absolute value. From the rule for reading off coordinates in coordinate system with tilted axes follows that the two world lines are the angle bisectors of the x- and ct-axes. The Minkowski diagram shows, that they are angle bisectors of the x′- and ct′-axes as well. That means both observers measure the same speed c for both photons.
Further coordinate systems corresponding to observers with arbitrary velocities can be added to this Minkowski diagram. For all these systems both photon world lines represent the angle bisectors of the axes. The more the relative speed approaches the speed of light the more the axes approach the corresponding angle bisector. The [math]\displaystyle{ x }[/math] axis is always more flat and the time axis more steep than the photon world lines. The scales on both axes are always identical, but usually different from those of the other coordinate systems.
8. Speed of Light and Causality
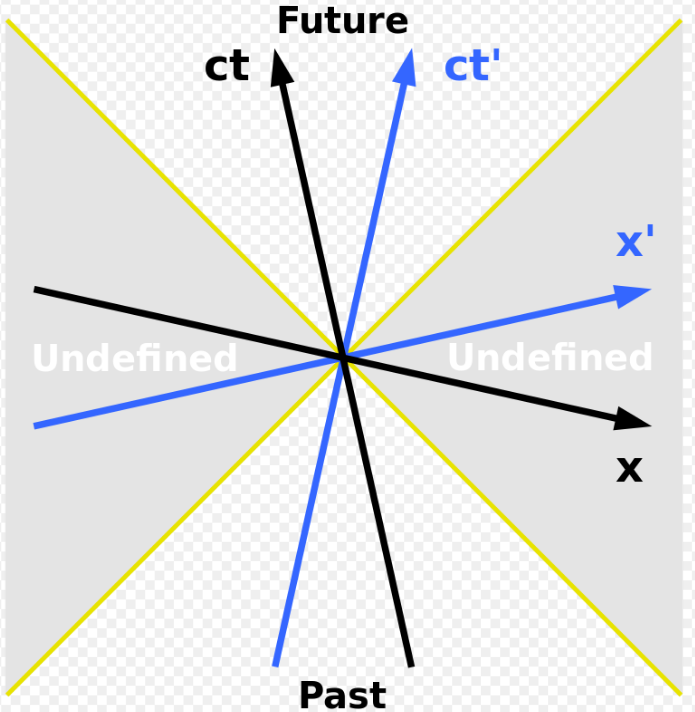
Straight lines passing the origin which are steeper than both photon world lines correspond with objects moving more slowly than the speed of light. If this applies to an object, then it applies from the viewpoint of all observers, because the world lines of these photons are the angle bisectors for any inertial reference frame. Therefore, any point above the origin and between the world lines of both photons can be reached with a speed smaller than that of the light and can have a cause-and-effect relationship with the origin. This area is the absolute future, because any event there happens later compared to the event represented by the origin regardless of the observer, which is obvious graphically from the Minkowski diagram.
Following the same argument the range below the origin and between the photon world lines is the absolute past relative to the origin. Any event there belongs definitely to the past and can be the cause of an effect at the origin.
The relationship between any such pairs of event is called timelike, because they have a time distance greater than zero for all observers. A straight line connecting these two events is always the time axis of a possible observer for whom they happen at the same place. Two events which can be connected just with the speed of light are called lightlike.
In principle a further dimension of space can be added to the Minkowski diagram leading to a three-dimensional representation. In this case the ranges of future and past become cones with apexes touching each other at the origin. They are called light cones.
9. The Speed of Light as a Limit
Following the same argument, all straight lines passing through the origin and which are more nearly horizontal than the photon world lines, would correspond to objects or signals moving faster than light regardless of the speed of the observer. Therefore, no event outside the light cones can be reached from the origin, even by a light-signal, nor by any object or signal moving with less than the speed of light. Such pairs of events are called spacelike because they have a finite spatial distance different from zero for all observers. On the other hand, a straight line connecting such events is always the space coordinate axis of a possible observer for whom they happen at the same time. By a slight variation of the velocity of this coordinate system in both directions it is always possible to find two inertial reference frames whose observers estimate the chronological order of these events to be different.
Therefore, an object moving faster than light, say from O to A in the adjoining diagram, would imply that, for any observer watching the object moving from O to A, another observer can be found (moving at less than the speed of light with respect to the first) for whom the object moves from A to O. The question of which observer is right has no unique answer, and therefore makes no physical sense. Any such moving object or signal would violate the principle of causality.
Also, any general technical means of sending signals faster than light would permit information to be sent into the originator's own past. In the diagram, an observer at O in the x-ct system sends a message moving faster than light to A. At A, it is received by another observer, moving so as to be in the x′-ct′ system, who sends it back, again faster than light, arriving at B. But B is in the past relative to O. The absurdity of this process becomes obvious when both observers subsequently confirm that they received no message at all, but all messages were directed towards the other observer as can be seen graphically in the Minkowski diagram. Furthermore, if it were possible to accelerate an observer to the speed of light, their space and time axes would coincide with their angle bisector. The coordinate system would collapse, in concordance with the fact that due to time dilation, time would effectively stop passing for them.
These considerations show that the speed of light as a limit is a consequence of the properties of spacetime, and not of the properties of objects such as technologically imperfect space ships. The prohibition of faster-than-light motion, therefore, has nothing in particular to do with electromagnetic waves or light, but comes as a consequence of the structure of spacetime.
10. Eponym
When Taylor and Wheeler composed Spacetime Physics (1966), they did not use the term "Minkowski diagram" for their spacetime geometry. Instead they included an acknowledgement of Minkowski's contribution to philosophy by the totality of his innovation of 1908.[29]
When abstracted to a line drawing, then any figure showing conjugate hyperbolas, with a selection of conjugate diameters, falls into this category. Students making drawings to accompany the exercises in George Salmon’s A Treatise on Conic Sections (1900) at pages 165–171 (on conjugate diameters) will be making Minkowski diagrams.
11. Spacetime Diagram of an Accelerating Observer in Special Relativity
The vertical direction indicates time, while the horizontal indicates distance, the dashed line is the spacetime trajectory ("world line") of the observer. The small dots are specific events in spacetime. If one imagines these events to be the flashing of a light, then the events that pass the two diagonal lines in the bottom half of the image (the past light cone of the observer in the origin) are the events visible to the observer. The slope of the world line (deviation from being vertical) gives the relative velocity to the observer. Note how the momentarily co-moving inertial frame changes when the observer accelerates.
References
- "What are position vs. time graphs?". Khan Academy. https://www.khanacademy.org/science/physics/one-dimensional-motion/displacement-velocity-time/a/position-vs-time-graphs. Retrieved 19 November 2018.
- Collier, Peter (2017). A Most Incomprehensible Thing: Notes Towards a Very Gentle Introduction to the Mathematics of Relativity (3rd ed.). Incomprehensible Books. ISBN 9780957389465.
- Mermin (1968) Chapter 17
- See Vladimir Karapetoff
- Einstein, Albert (1905). "Zur Elektrodynamik bewegter Körper". Annalen der Physik 322 (10): 891–921. doi:10.1002/andp.19053221004. Bibcode: 1905AnP...322..891E. http://www.physik.uni-augsburg.de/annalen/history/einstein-papers/1905_17_891-921.pdf. . See also: English translation.
- Minkowski, Hermann (1909). "Raum und Zeit". Physikalische Zeitschrift 10: 75–88. Various English translations on Wikisource: Space and Time
- Demtröder, Wolfgang (2016). Mechanics and Thermodynamics (illustrated ed.). Springer. pp. 92–93. ISBN 978-3-319-27877-3. https://books.google.com/books?id=TWUSDgAAQBAJ. Extract of page 93
- Freund, Jürgen (2008). Special Relativity for Beginners: A Textbook for Undergraduates. World Scientific. pp. 49. ISBN 978-9812771599.
- Silberstein, Ludwik (1914). The Theory of Relativity. p. 131. https://archive.org/details/theoryofrelativi00silbrich.
- Wilson, Edwin B.; Lewis, Gilbert N. (1912). "The Space-time Manifold of Relativity. The Non-Euclidean Geometry of Mechanics and Electromagnetics". Proceedings of the American Academy of Arts and Sciences 48: 387–507.
- Synthetic Spacetime, a digest of the axioms used, and theorems proved, by Wilson and Lewis. Archived by WebCite https://www.webcitation.org/5koAax8ct?url=http://ca.geocities.com/cocklebio/synsptm.html
- Mirimanoff, Dmitry (1921). "La transformation de Lorentz-Einstein et le temps universel de M. Ed. Guillaume". Archives des sciences physiques et naturelles (supplement). 5 3: 46–48. http://gallica.bnf.fr/ark:/12148/bpt6k2991536/f682.image. (Translation: The Lorentz–Einstein transformation and the universal time of Ed. Guillaume)
- Shadowitz, Albert (2012). The Electromagnetic Field (Reprint of 1975 ed.). Courier Dover Publications. pp. 460. ISBN 978-0486132013. See Google books, p. 460 https://books.google.com/books?id=31hjdifsTeQC&pg=PA460&dq=%22distortion%22
- Sartori, Leo (1996). Understanding Relativity: A simplified approach to Einstein's theories. University of California Press. pp. 151ff. ISBN 0-520-20029-2.
- Gruner, Paul; Sauter, Josef (1921). "Représentation géométrique élémentaire des formules de la théorie de la relativité". Archives des sciences physiques et naturelles. 5 3: 295–296. http://gallica.bnf.fr/ark:/12148/bpt6k2991536/f295.image. (Translation: Elementary geometric representation of the formulas of the special theory of relativity)
- Gruner, Paul (1921). "Eine elementare geometrische Darstellung der Transformationsformeln der speziellen Relativitätstheorie". Physikalische Zeitschrift 22: 384–385. (Translation: An elementary geometrical representation of the transformation formulas of the special theory of relativity)
- Shadowitz, Albert (1988). Special Relativity (Reprint of 1968 ed.). Courier Dover Publications. pp. 20–22. ISBN 0-486-65743-4. https://archive.org/details/specialrelativit0000shad.
- Born, Max (1920). Die Relativitätstheorie Einsteins (First ed.). Springer. pp. 177–180. http://catalog.hathitrust.org/Record/006663730. See also Reprint (2013) of third edition (1922) at Google books, p. 187
- Gruner, Paul (1922). Elemente der Relativitätstheorie. Bern: P. Haupt.
- Gruner, Paul (1922). "Graphische Darstellung der speziellen Relativitätstheorie in der vierdimensionalen Raum-Zeit-Welt I". Zeitschrift für Physik 10 (1): 22–37. doi:10.1007/BF01332542. Bibcode: 1922ZPhy...10...22G. https://dx.doi.org/10.1007%2FBF01332542
- Gruner, Paul (1922). "Graphische Darstellung der speziellen Relativitätstheorie in der vierdimensionalen Raum-Zeit-Welt II". Zeitschrift für Physik 10 (1): 227–235. doi:10.1007/BF01332563. Bibcode: 1922ZPhy...10..227G. https://dx.doi.org/10.1007%2FBF01332563
- Gruner, Paul (1921). "a) Représentation graphique de l'univers espace-temps à quatre dimensions. b) Représentation graphique du temps universel dans la théorie de la relativité". Archives des sciences physiques et naturelles. 5 4: 234–236. http://gallica.bnf.fr/ark:/12148/bpt6k299154k/f235.image. (Translation: Graphical representation of the four-dimensional space-time universe)
- Gruner, Paul (1922). "Die Bedeutung "reduzierter" orthogonaler Koordinatensysteme für die Tensoranalysis und die spezielle Relativitätstheorie". Zeitschrift für Physik 10 (1): 236–242. doi:10.1007/BF01332564. Bibcode: 1922ZPhy...10..236G. https://zenodo.org/record/1711705.
- Gruner, Paul (1924). "Geometrische Darstellungen der speziellen Relativitätstheorie, insbesondere des elektromagnetischen Feldes bewegter Körper". Zeitschrift für Physik 21 (1): 366–371. doi:10.1007/BF01328285. Bibcode: 1924ZPhy...21..366G. https://dx.doi.org/10.1007%2FBF01328285
- Loedel, Enrique (1948). "Aberración y Relatividad". Anales de la Sociedad Cientifica Argentina 145: 3–13. https://archive.org/details/Loedel1948AberracionYRelatividad.
- Fisica relativista, Kapelusz Editorial, Buenos Aires, Argentina (1955).
- Amar, Henri (1955). "New Geometric Representation of the Lorentz Transformation". American Journal of Physics 23 (8): 487–489. doi:10.1119/1.1934074. Bibcode: 1955AmJPh..23..487A. https://dx.doi.org/10.1119%2F1.1934074
- Amar, Henri; Loedel, Enrique (1957). "Geometric Representation of the Lorentz Transformation". American Journal of Physics 25 (5): 326–327. doi:10.1119/1.1934453. Bibcode: 1957AmJPh..25..326A. https://dx.doi.org/10.1119%2F1.1934453
- Taylor; Wheeler (1966). Spacetime Physics. p. 37. https://archive.org/details/spacetimephysics0000tayl. "Minkowski's insight is central to the understanding of the physical world. It focuses attention on those quantities, such as interval, which are the same in all frames of reference. It brings out the relative character of quantities, such as velocity, energy, time, distance, which depend on the frame of reference."

