Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Gyanendra Prasad Joshi | -- | 1452 | 2022-09-27 10:26:32 | | | |
| 2 | Vivi Li | Meta information modification | 1452 | 2022-09-27 10:29:44 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Sindhwani, M.; Sachdeva, S.; Arora, K.; Yoon, T.; Yoo, D.; Joshi, G.P.; Cho, W. Vehicular Ad Hoc Networks. Encyclopedia. Available online: https://encyclopedia.pub/entry/27657 (accessed on 23 June 2026).
Sindhwani M, Sachdeva S, Arora K, Yoon T, Yoo D, Joshi GP, et al. Vehicular Ad Hoc Networks. Encyclopedia. Available at: https://encyclopedia.pub/entry/27657. Accessed June 23, 2026.
Sindhwani, Manoj, Shippu Sachdeva, Krishan Arora, Taehyun Yoon, Daeseung Yoo, Gyanendra Prasad Joshi, Woong Cho. "Vehicular Ad Hoc Networks" Encyclopedia, https://encyclopedia.pub/entry/27657 (accessed June 23, 2026).
Sindhwani, M., Sachdeva, S., Arora, K., Yoon, T., Yoo, D., Joshi, G.P., & Cho, W. (2022, September 27). Vehicular Ad Hoc Networks. In Encyclopedia. https://encyclopedia.pub/entry/27657
Sindhwani, Manoj, et al. "Vehicular Ad Hoc Networks." Encyclopedia. Web. 27 September, 2022.
Copy Citation
The vehicular ad hoc network is an emerging area of technology that provides intelligent transportation systems with vast advantages and applications. Frequent disconnections between the vehicular nodes due to high-velocity vehicles impact network performance.
VANET
routing protocols
k-means
soft computing
PDR
cluster
1. Introduction
Vehicle ad hoc networks (VANET) are often referred to as networks on wheels, which are used to provide connectivity between vehicle nodes. It is an outgrowth of mobile networks. Vehicular nodes are self-organized and connect with each other in a less environmentally sound infrastructure. The IEEE Committee has established the IEEE 802.11p standard for VANETs, recognizing that the ad hoc vehicle network is essential for the provision of safety-associated applications in the Intelligent Transportation System. For short-range transmission, the US Federal Communication Commission (FFC) has allotted 75 MHz of bandwidth at 5.9 GHz between vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I). The main objective of VANETs is to create an intelligent framework for transport. In building V2V and V2I communications, Dedicated Short Range Communication (DSRC) may play an important role. DSRC has a range of around one thousand meters. Inter-networking via VANETs has received huge attention over the past few years. Realizing its increasing importance, academia, major automotive manufacturers, and government agencies are making efforts to develop VANETs [1][2]. VANET has mobile nodes, sensor vehicles, static networks, fixed roadside access points (RSAP), and wireless links such as V2V, V2I, and point-to-a-vehicle access (I2V). Depending on the coverage requirements, this wireless communication device consists of a combination of GPS and a cellular communication system using either one- or multi-hop mode. One of this technology’s main services is to support drivers with protection so that road injuries can be reduced. Providing protection for onboard passengers is the main service offered by this form of network. A VANET’s key requirements are high processing power, large storage space, adequate energy, and node movement estimation [3][4]. This technology facilitates a variety of applications that affect daily human life, such as infotainment, traffic management services, and security, as displayed in Figure 1. Due to their unique characteristics, several clustering schemes have been proposed for VANETs in previous years. Due to technological advancement in vehicle mobility, protocols that utilize multiple network parameters have been revealed to be highly appropriate for VANETs. The authors selected parameters such as distance, density, connection stability, velocity, and location in soft computing techniques for their review work. In addition, VANETs have received a lot of consideration in industry a0nd are predicted to be introduced in the near future, thus attaining data sharing between vehicles and organizations that enable different mobile vehicle services such as safety, traffic performance, urban detection, driver support, and vehicle user entertainment [5]. Vehicles can create intra-vehicle, V2V, V2I, and still vehicle-to-everything (V2X) transmission, in particular, in such a VANET to partially reduce the load of data traffic while meeting the maintenance requests of vehicle users nearby [6].
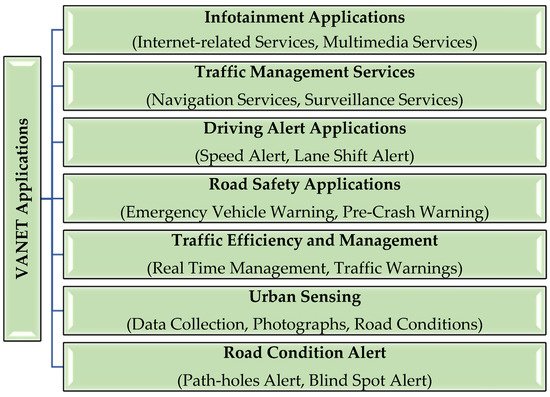
Figure 1. VANET Applications with Examples.
The traffic flowing through a vehicular network increases with the vehicular nodes, resulting in network congestion. Routing in the network then becomes a challenging task which affects throughput, delay, and packet loss and hence reduces the overall efficiency of the network.
In past years, Particle Swarm Optimization (PSO), K-means, Neural Networks (NN), Artificial Bee Colony (ABC), Genetic Algorithm (GA), Firefly Algorithm (FA), and Fuzzy Logic (FL) have been proposed to upgrade the efficiency in wireless sensor networks with the rapid expansion of soft computing techniques [7].
2. Architecture of VANETs
VANETs adopt similar concepts of connectivity and design as MANETs. VANET communication can be divided into three major categories: (1) V2V communication, where vehicles can link immediately to disseminate messages to each other; (2) V2I communication [8], in which the vehicle can connect with infrastructure-based networks for exchanging data wirelessly; and (3) Infrastructure-to-Infrastructure (I2I) networks to contribute to major vehicular applications, as shown in Figure 2. A wireless connection exists between the infrastructure and nearby vehicles, where it can relay data in both directions (e.g., V2I and I2V) [9]. The infrastructure offers up-to-date information and internet access to vehicles through this connection. As a result, they will receive major updates on current events as well as traffic on nearby highways. VANET architecture includes communication between the onboard unit (OBU) installed on vehicles with the Roadside Unit (RSU), which are mostly static in nature and are installed at the roadside. The synchronization between all the units provides improved results in the form of delivery, throughput, and efficiency.
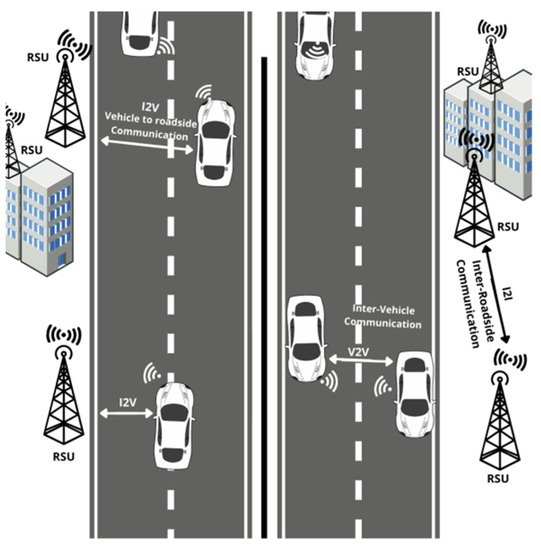
Figure 2. VANET Architecture.
The Roadside Unit (RSU) and an onboard unit (OBU) are the key elements used for VANET [10]. Normally, the RSU is static all along the paths, while the OBU is housed inside the vehicle. All RSUs are interconnected with each other along the route. The key RSU functions include: (i) Expanding the range of VANET communication [11] by sending messages to another OBUs and RSUs. (ii) Applications for running protection, such as traffic situation coverage or accident alerts. (iii) Supplying OBUs with internet access.
The OBU, on the other hand, handles contact between vehicles and the RSUs on the network [12], as shown in Figure 3. An OBU comprises a processor, memory, network unit, and sensors for resource commands. Later, the OBU observes and collects the data to create messages delivered via wireless media to nearby vehicles [13].
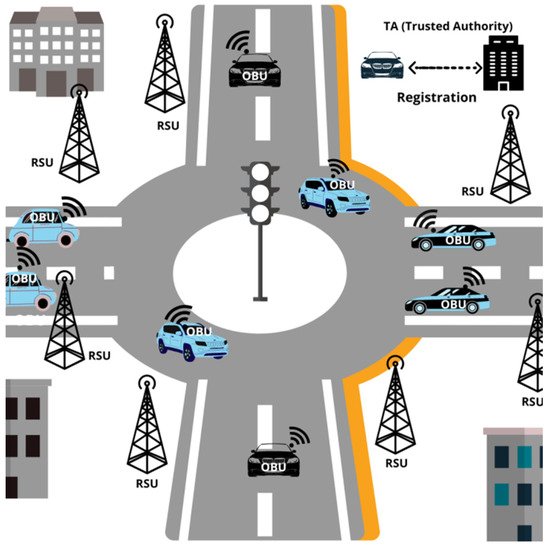
Figure 3. VANET Components.
3. Characteristics of VANETs
Since VANETs are used in so many monitoring and safety applications, they have a number of hardware and communication device characteristics [14] that affect VANET communication. The following is a list of the most significant characteristics that affect VANET communication [15]:
-
Estimate of movement: The movement of vehicles is limited by the urban structure, such as sidewalks, crossings, and roads, thereby possible vehicle activities can be predictable [16].
-
Power constraints: Because every vehicle is fitted with prolonged battery life, the VANETs do not have any power limitations.
-
Variable network density: Network density depends upon the traffic in roadside scenarios; in rural areas the density is low, whereas in traffic jams and highly populated urban areas, the density is high.
-
Mobility: In VANETs, vehicles usually drive at high velocity. A slight delay in V2V transmission can also lead to several problems.
-
Variable Network Topology: Due to the extreme mobility of vehicles, the topology of VANETs varies rapidly. This makes VANETs susceptible to attacks and the detection of malicious vehicles is difficult [17].
-
Real-time restrictions: In VANETs, the communication of data has a fixed time threshold range. This is intended to provide ample time for the recipient to make determinations and take necessary actions quickly.
-
Processing and storage capacity: In VANETs, it is common to manage vast quantities of data between vehicles and infrastructures. Therefore, the capacity to compute and store is a daunting problem.
-
Volatility: It is common for the interactions between two nodes in VANETs to arise only once because of their versatility. The links between nodes will stay within a few wireless hops for a restricted duration of time. Thus, the protection of personal contacts at VANET will be difficult to ensure.
-
High processing capacity: Compared to other mobile nodes, operational vehicles can utilize much higher processing, networking, and sensing abilities [18].
-
Conventional mobility: Vehicles have motions that are more convenient than traditional MANETs. Vehicles travel only on highways. From GPS technology, roadway information is available.
-
Wide scale: With several participants, VANETs could span a whole road network. Its area of coverage can vary from a neighborhood to a whole town.
4. Challenges of VANETs
In Intelligent Transport System (ITS), which varies from traffic protection applications to infotainment applications, different applications are used. Such a set of applications presents different specifications for protocols for vehicular communication [19]. Such requirements lead to new challenges:
-
Bandwidth limitations: VANETs endure channel overcrowding, particularly in a high-density zone, because of the absence of a central controller that handles the use of restricted bandwidth and comfortable activity [20].
-
Delay constraints: Frequent topology changes in VANET have rigorous time rules. Hence, it is important to consider a fair time delay in designing effective vehicle transmission protocols.
-
Privacy rights: Vehicular contact must resolve the tradeoff between privacy and accountability. Each car has to believe the source of the data it receives.
-
Cross-layering protocols: Real-time applications have rigorous limitations in terms of time and place. The routes are often altered due to the complex topology. Thus, delivering reliable links via the transport layer is effective in such a situation.
-
Security threats: Because of the open environment of VANETs, vast amounts of attacks can be targeted. Therefore, it is a challenging problem to discover new incidents related to vehicular interaction and protect the clustering protocols compared to such attacks [21].
-
High dynamic and disconnected topology: In order to deal with such conditions, a new research model is therefore implemented called Vehicular Delay Tolerant Networks [22].
References
- Zhou, H.; Wang, H.; Chen, X.; Li, X.; Xu, S. Data offloading techniques through vehicular ad hoc networks: A survey. IEEE Access 2018, 6, 65250–65259.
- Abdel-Halim, I.T.; Fahmy, H.M.A. Prediction-based protocols for vehicular Ad Hoc Networks: Survey and taxonomy. Comput. Netw. 2018, 130, 34–50.
- Lu, Z.; Qu, G.; Liu, Z. A survey on recent advances in vehicular network security, trust, and privacy. IEEE Trans. Intell. Transp. Syst. 2018, 20, 760–776.
- Tripp-Barba, C.; Zaldívar-Colado, A.; Urquiza-Aguiar, L.; Aguilar-Calderón, J.A. Survey on routing protocols for vehicular ad hoc networks based on multimetrics. Electronics 2019, 8, 1177.
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A comparative survey of VANET clustering techniques. IEEE Commun. Surv. Tutor. 2016, 19, 657–681.
- Yang, P.; Wang, J.; Zhang, Y.; Tang, Z.; Song, S. Clustering algorithm in VANETs: A survey. In Proceedings of the 2015 IEEE 9th International Conference on Anti-Counterfeiting, Security, and Identification (ASID), Xiamen, China, 25–27 September 2015; pp. 166–170.
- Dhasian, H.R.; Balasubramanian, P. Survey of data aggregation techniques using soft computing in wireless sensor networks. IET Inf. Secur. 2013, 7, 336–342.
- Yogarayan, S.; Razak, S.F.A.; Azman, A.; Abdullah, M.F.A. A mini review of peer-to-peer (P2P) for vehicular communication. Indones. J. Electr. Eng. Inform. (IJEEI) 2021, 9, 185–197.
- Sharma, S.; Kaul, A.; Ahmed, S.; Sharma, S. A detailed tutorial survey on VANETs: Emerging architectures, applications, security issues, and solutions. Int. J. Commun. Syst. 2021, 34, e4905.
- Weber, J.S.; Neves, M.; Ferreto, T. VANET simulators: An updated review. J. Braz. Comput. Soc. 2021, 27, 1–31.
- Xia, Z.; Wu, J.; Wu, L.; Chen, Y.; Yang, J.; Yu, P.S. A comprehensive survey of the key technologies and challenges surrounding vehicular ad hoc networks. ACM Trans. Intell. Syst. Technol. (TIST) 2021, 12, 1–30.
- Goyal, A.K.; Agarwal, G.; Tripathi, A.K. Network Architectures, Challenges, Security Attacks, Research Domains and Research Methodologies in VANET: A Survey. Int. J. Comput. Netw. Inf. Secur. 2019, 11, 37–44.
- Katiyar, A.; Singh, D.; Yadav, R.S. State-of-the-art approach to clustering protocols in vanet: A survey. Wirel. Netw. 2020, 26, 5307–5336.
- Hande, R.S.; Muddana, A. Comprehensive survey on clustering-based efficient data dissemination algorithms for VANET. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, 3–5 October 2016; pp. 629–632.
- Azam, F.; Kumar, S.; Yadav, K.P.; Priyadarshi, N.; Padmanaban, S. An outline of the security challenges in VANET. In Proceedings of the 2020 IEEE 7th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON), Prayagraj, India, 27–29 November 2020; pp. 1–6.
- Sheikh, M.S.; Liang, J. A comprehensive survey on VANET security services in traffic management system. Wirel. Commun. Mob. Comput. 2019, 2019, 2423915.
- Zhang, D.; Zhang, T.; Liu, X. Novel self-adaptive routing service algorithm for application in VANET. Appl. Intell. 2019, 49, 1866–1879.
- Cunha, F.; Villas, L.; Boukerche, A.; Maia, G.; Viana, A.; Mini, R.A.F.; Loureiro, A.A.F. Data communication in VANETs: Protocols, applications and challenges. Ad. Hoc. Netw. 2016, 44, 90–103.
- Hamdi, M.M.; Audah, L.; Rashid, S.A.; Mohammed, A.H.; Alani, S.; Mustafa, A.S. A review of applications, characteristics and challenges in vehicular ad hoc networks (VANETs). In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; pp. 1–7.
- Shrestha, R.; Bajracharya, R.; Nam, S.Y. Challenges of future VANET and cloud-based approaches. Wirel. Commun. Mob. Comput. 2018, 2018, 5603518.
- Al-Heety, O.S.; Zakaria, Z.; Ismail, M.; Shakir, M.M.; Alani, S.; Alsariera, H. A comprehensive survey: Benefits, services, recent works, challenges, security, and use cases for sdn-vanet. IEEE Access 2020, 8, 91028–91047.
- Eze, E.C.; Zhang, S.J.; Liu, E.J.; Eze, J.C. Advances in vehicular ad-hoc networks (VANETs): Challenges and road-map for future development. Int. J. Autom. Comput. 2016, 13, 1–18.
More
Information
Subjects:
Transportation
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
13.1K
Revisions:
2 times
(View History)
Update Date:
27 Sep 2022
Table of Contents



Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No