 +1 credit
+1 credit
Video Upload Options
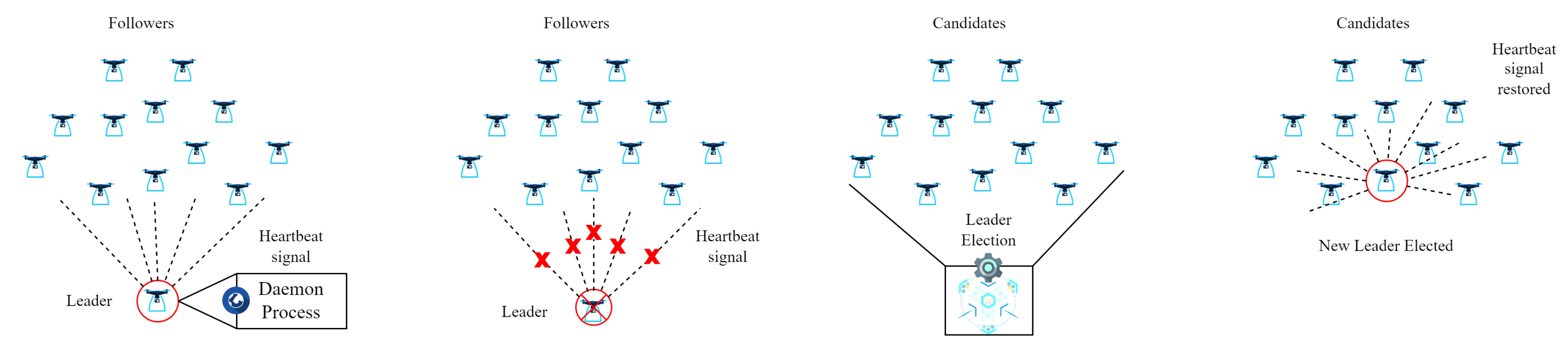
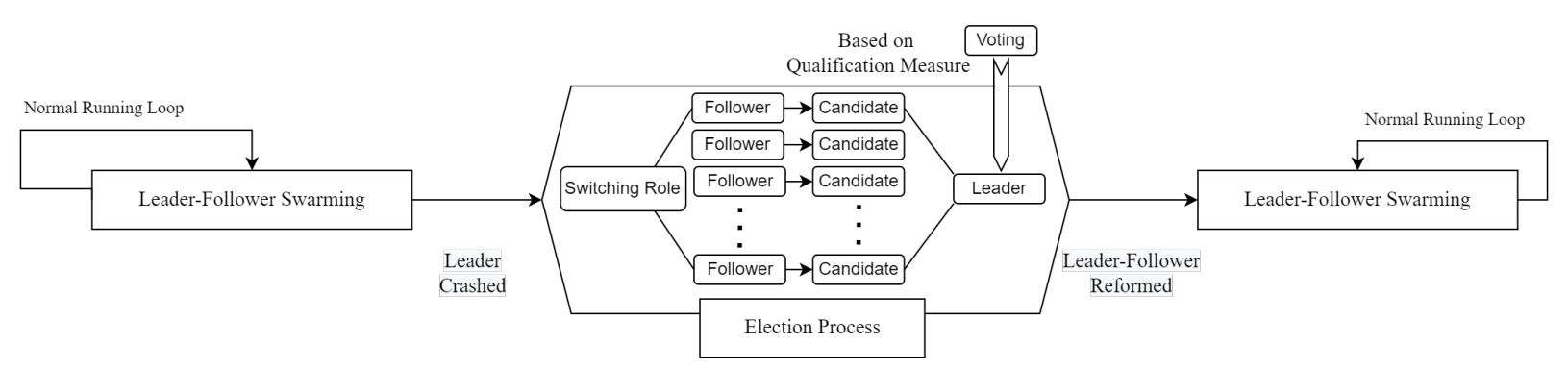
The recent advances in unmanned aerial vehicles (UAVs) enormously improve their utility and expand their application scope. The UAV and swarm implementation further prevail in Smart City practices with the aid of edge computing and urban Internet of Things. The lead–follow formation in UAV swarm is an important organization means and has been adopted in diverse exercises, for its efficiency and ease of control. The reliability of centralization makes the entire swarm system in risk of collapse and instability, if a fatal fault incident happens in the leader. Researchers propose a voting-based leader election scheme inspired by the Raft method in distributed computation consensus to build a mechanism helping the distributed swarm recover from possible failures.
1. Introduction
2. Lead-Follow UAV Swarm with Constrained Communication
The Leader Election Process
References
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293.
- Ullah, Z.; Al-Turjman, F.; Mostarda, L.; Gagliardi, R. Applications of artificial intelligence and machine learning in smart cities. Comput. Commun. 2020, 154, 313–323.
- Wu, D.; Arkhipov, D.I.; Kim, M.; Talcott, C.L.; Regan, A.C.; McCann, J.A.; Venkatasubramanian, N. ADDSEN: Adaptive data processing and dissemination for drone swarms in urban sensing. IEEE Trans. Comput. 2016, 66, 183–198.
- Zhang, C. Design and application of fog computing and Internet of Things service platform for smart city. Future Gener. Comput. Syst. 2020, 112, 630–640.
- Hu, Z.; Bai, Z.; Yang, Y.; Zheng, Z.; Bian, K.; Song, L. UAV aided aerial-ground IoT for air quality sensing in smart city: Architecture, technologies, and implementation. IEEE Netw. 2019, 33, 14–22.
- Neirotti, P.; De Marco, A.; Cagliano, A.C.; Mangano, G.; Scorrano, F. Current trends in Smart City initiatives: Some stylised facts. Cities 2014, 38, 25–36.
- Kim, T.h.; Ramos, C.; Mohammed, S. Smart city and IoT. Future Gener. Comput. Syst. 2017, 76, 159–162.
- Khan, L.U.; Yaqoob, I.; Tran, N.H.; Kazmi, S.A.; Dang, T.N.; Hong, C.S. Edge-computing-enabled smart cities: A comprehensive survey. IEEE Internet Things J. 2020, 7, 10200–10232.
- Wu, Y. Robust learning-enabled intelligence for the internet of things: A survey from the perspectives of noisy data and adversarial examples. IEEE Internet Things J. 2020, 8, 9568–9579.
- Jin, J.; Gubbi, J.; Marusic, S.; Palaniswami, M. An information framework for creating a smart city through internet of things. IEEE Internet Things J. 2014, 1, 112–121.
- Qadir, Z.; Ullah, F.; Munawar, H.S.; Al-Turjman, F. Addressing disasters in smart cities through UAVs path planning and 5G communications: A systematic review. Comput. Commun. 2021, 168, 114–135.
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutorials 2017, 19, 1657–1681.
- Zhao, Z.; Min, G.; Gao, W.; Wu, Y.; Duan, H.; Ni, Q. Deploying edge computing nodes for large-scale IoT: A diversity aware approach. IEEE Internet Things J. 2018, 5, 3606–3614.
- Zuo, Y.; Wu, Y.; Min, G.; Huang, C.; Pei, K. An intelligent anomaly detection scheme for micro-services architectures with temporal and spatial data analysis. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 548–561.
- Garg, S.; Singh, A.; Batra, S.; Kumar, N.; Yang, L.T. UAV-empowered edge computing environment for cyber-threat detection in smart vehicles. IEEE Netw. 2018, 32, 42–51.
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-enabled intelligent transportation systems for the smart city: Applications and challenges. IEEE Commun. Mag. 2017, 55, 22–28.
- Osseiran, A.; Boccardi, F.; Braun, V.; Kusume, K.; Marsch, P.; Maternia, M.; Queseth, O.; Schellmann, M.; Schotten, H.; Taoka, H.; et al. Scenarios for 5G mobile and wireless communications: The vision of the METIS project. IEEE Commun. Mag. 2014, 52, 26–35.
- Xu, Y.; Gui, G.; Gacanin, H.; Adachi, F. A survey on resource allocation for 5G heterogeneous networks: Current research, future trends and challenges. IEEE Commun. Surv. Tutorials 2021, 23, 668–695.
- Rost, P.; Mannweiler, C.; Michalopoulos, D.S.; Sartori, C.; Sciancalepore, V.; Sastry, N.; Holland, O.; Tayade, S.; Han, B.; Bega, D.; et al. Network slicing to enable scalability and flexibility in 5G mobile networks. IEEE Commun. Mag. 2017, 55, 72–79.
- Zuo, Y.; Wu, Y.; Min, G.; Cui, L. Learning-based network path planning for traffic engineering. Future Gener. Comput. Syst. 2019, 92, 59–67.
- Shafi, M.; Molisch, A.F.; Smith, P.J.; Haustein, T.; Zhu, P.; De Silva, P.; Tufvesson, F.; Benjebbour, A.; Wunder, G. 5G: A tutorial overview of standards, trials, challenges, deployment, and practice. IEEE J. Sel. Areas Commun. 2017, 35, 1201–1221.
- Qi, F.; Zhu, X.; Mang, G.; Kadoch, M.; Li, W. UAV network and IoT in the sky for future smart cities. IEEE Netw. 2019, 33, 96–101.
- Xiong, F.; Li, A.; Wang, H.; Tang, L. An SDN-MQTT based communication system for battlefield UAV swarms. IEEE Commun. Mag. 2019, 57, 41–47.
- Chen, W.; Liu, B.; Huang, H.; Guo, S.; Zheng, Z. When UAV swarm meets edge-cloud computing: The QoS perspective. IEEE Netw. 2019, 33, 36–43.
- Chen, R.; Yang, B.; Zhang, W. Distributed and collaborative localization for swarming UAVs. IEEE Internet Things J. 2020, 8, 5062–5074.
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm robotic behaviors and current applications. Front. Robot. 2020, 7, 36.
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41.
- Chung, S.J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A survey on aerial swarm robotics. IEEE Trans. Robot. 2018, 34, 837–855.
- Wang, H.; Rubenstein, M. Shape formation in homogeneous swarms using local task swapping. IEEE Trans. Robot. 2020, 36, 597–612.
- Loria, A.; Dasdemir, J.; Jarquin, N.A. Leader–Follower formation and tracking control of mobile robots along straight paths. IEEE Trans. Control. Syst. Technol. 2015, 24, 727–732.
- Ganesan, R.; Raajini, X.M.; Nayyar, A.; Sanjeevikumar, P.; Hossain, E.; Ertas, A.H. BOLD: Bio-inspired optimized leader election for multiple drones. Sensors 2020, 20, 3134.
- Cui, J. Kong J Gerla M Zhou S The challenges of building mobile underwater wireless networks for aquatic applications. IEEE Netw. 2006, 20, 12.
- Sánchez-García, J.; García-Campos, J.M.; Arzamendia, M.; Reina, D.G.; Toral, S.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65.
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890.
- Johansen, T.A.; Zolich, A.; Hansen, T.; Sørensen, A.J. Unmanned aerial vehicle as communication relay for autonomous underwater vehicle—Field tests. In Proceedings of the 2014 IEEE Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014; pp. 1469–1474.
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile unmanned aerial vehicles (UAVs) for energy-efficient Internet of Things communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589.
- Razi, A. Optimal measurement policy for linear measurement systems with applications to UAV network topology prediction. IEEE Trans. Veh. Technol. 2019, 69, 1970–1981.
- Razi, A.; Afghah, F.; Chakareski, J. Optimal measurement policy for predicting UAV network topology. In Proceedings of the 51st Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 29 October–1 November 2017; pp. 1374–1378.
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466.
- Gregory, D. From a view to a kill: Drones and late modern war. Theory Cult. Soc. 2011, 28, 188–215.
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375.
- Rubenstein, M.; Cornejo, A.; Nagpal, R. Programmable self-assembly in a thousand-robot swarm. Science 2014, 345, 795–799.
- Chen, W.; Liu, J.; Guo, H. Achieving robust and efficient consensus for large-scale drone swarm. IEEE Trans. Veh. Technol. 2020, 69, 15867–15879.
- Moarref, S.; Kress-Gazit, H. Automated synthesis of decentralized controllers for robot swarms from high-level temporal logic specifications. Auton. Robot. 2020, 44, 585–600.
- Kim, H.; Mokdad, L.; Ben-Othman, J. Designing UAV surveillance frameworks for smart city and extensive ocean with differential perspectives. IEEE Commun. Mag. 2018, 56, 98–104.
- Zhao, C.; Liu, J.; Sheng, M.; Teng, W.; Zheng, Y.; Li, J. Multi-UAV trajectory planning for energy-efficient content coverage: A decentralized learning-based approach. IEEE J. Sel. Areas Commun. 2021, 39, 3193–3207.
- Barborak, M.; Dahbura, A.; Malek, M. The consensus problem in fault-tolerant computing. ACM Comput. Surv. (CSur) 1993, 25, 171–220.
- Fischer, M.J.; Lynch, N.A.; Paterson, M.S. Impossibility of distributed consensus with one faulty process. J. ACM 1985, 32, 374–382.
- Gilbert, S.; Lynch, N. Brewer’s conjecture and the feasibility of consistent, available, partition-tolerant web services. Acm Sigact News 2002, 33, 51–59.
- Xiao, Y.; Zhang, N.; Lou, W.; Hou, Y.T. A survey of distributed consensus protocols for blockchain networks. IEEE Commun. Surv. Tutor. 2020, 22, 1432–1465.
- Ongaro, D.; Ousterhout, J. In search of an understandable consensus algorithm. In Proceedings of the USENIX Annual Technical Conference (Usenix ATC 14), Philadelphia, PA, USA, 19–20 June 2014; pp. 305–319.
- Lamport, L. The part-time parliament. In Concurrency: The Works of Leslie Lamport; Association for Computing Machinery: New York, NY, USA, 2019; pp. 277–317.
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control. 2004, 49, 1520–1533.
- Reynolds, C.W. Flocks, Herds and Schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH’87), New York, NY, USA, August 1987; pp. 25–34.
- Mou, Z.; Liu, J.; Yun, X.; Gao, F.; Wu, Q. Cluster Head Detection for Hierarchical UAV Swarm With Graph Self-supervised Learning. arXiv 2022, arXiv:2203.04311.
- Ma, T.; Zhou, H.; Qian, B.; Fu, A. A large-scale clustering and 3D trajectory optimization approach for UAV swarms. Sci. China Inf. Sci. 2021, 64, 1–16.
- Latiff, N.A.; Tsimenidis, C.C.; Sharif, B.S. Energy-aware clustering for wireless sensor networks using particle swarm optimization. Proceedings of IEEE 18th International Symposium on Personal, Indoor and Mobile rRadio Communications, Athens, Greece, 3–7 September 2007; pp. 1–5.

