Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Syed Agha Hassnain Mohsan | -- | 3044 | 2022-06-30 06:43:11 | | | |
| 2 | Camila Xu | Meta information modification | 3044 | 2022-06-30 08:58:37 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. Battery Charging Techniques for Unmanned Aerial Vehicles. Encyclopedia. Available online: https://encyclopedia.pub/entry/24663 (accessed on 18 July 2026).
Mohsan SAH, Othman NQH, Khan MA, Amjad H, Żywiołek J. Battery Charging Techniques for Unmanned Aerial Vehicles. Encyclopedia. Available at: https://encyclopedia.pub/entry/24663. Accessed July 18, 2026.
Mohsan, Syed Agha Hassnain, Nawaf Qasem Hamood Othman, Muhammad Asghar Khan, Hussain Amjad, Justyna Żywiołek. "Battery Charging Techniques for Unmanned Aerial Vehicles" Encyclopedia, https://encyclopedia.pub/entry/24663 (accessed July 18, 2026).
Mohsan, S.A.H., Othman, N.Q.H., Khan, M.A., Amjad, H., & Żywiołek, J. (2022, June 30). Battery Charging Techniques for Unmanned Aerial Vehicles. In Encyclopedia. https://encyclopedia.pub/entry/24663
Mohsan, Syed Agha Hassnain, et al. "Battery Charging Techniques for Unmanned Aerial Vehicles." Encyclopedia. Web. 30 June, 2022.
Copy Citation
Unmanned Aerial Vehicles (UAVs) are intended to be controlled remotely, either through predefined trajectories or through a radio controller. UAVs are now essential components in both civilian and military applications. UAVs, on the other hand, are energy-hungry devices that deplete batteries within minutes of operation. Due to limited battery capacity, UAVs have short flight times.
wireless power transfer
unmanned aerial vehicles (UAVs)
charging
battery capacity
1. Introduction
In the last decade, there has been a rapidly growing advancement in the applicability of drones (also known as unmanned aerial vehicles (UAVs)) in different areas, including monitoring, public security, traffic surveillance, military operations, exploration of hidden or hazardous area, damage assessment, 3D mapping, indoor/outdoor navigation, disaster relief, precision agriculture, data sharing, infrastructure management and logistics, [1] owing to their lightweight, compact design and high maneuverability. Figure 1 shows different applications of drones. UAVs carrying a range of technologies for communication and sensing have captured the interest of several service providers including Walmart, DHL, Google and Amazon [2][3]. Due to the extensive increase in online shopping, users now require high-speed delivery services. However, fast delivery is becoming a successful tool for online retailers. Aside from that, retailers may face a critical challenge in providing eco-friendly, cost-effective and efficient last-mile delivery. In this regard, UAVs have emerged as promising solutions with fast and innovative concepts to ensure last-mile delivery along with environmental security. Moreover, drones have become a key element in 5G networks, either as a base station or a mobile relaying system to enable cellular UAV networks. With such an expanding and staggering market interest, service reliability of integrating UAVs will become a critical success factor. However, there are several crucial factors which limit the performance of UAVs. Some of these factors are limited battery endurance, restricted mobility, limited autonomy and limited flight time. Limited flight time is due to different elements, including sensor accuracy, harsh atmospheric conditions, fixed-wing size and battery endurance. Several studies have focused on multiple aspects of UAVs [4] and suggested viable solutions to overcome these challenges, such as using high-quality devices including batteries, wing, geometry, manufacturing materials and motors. Some studies have reported optimization algorithms to seek the shortest route for UAVs to reach their intended destination.
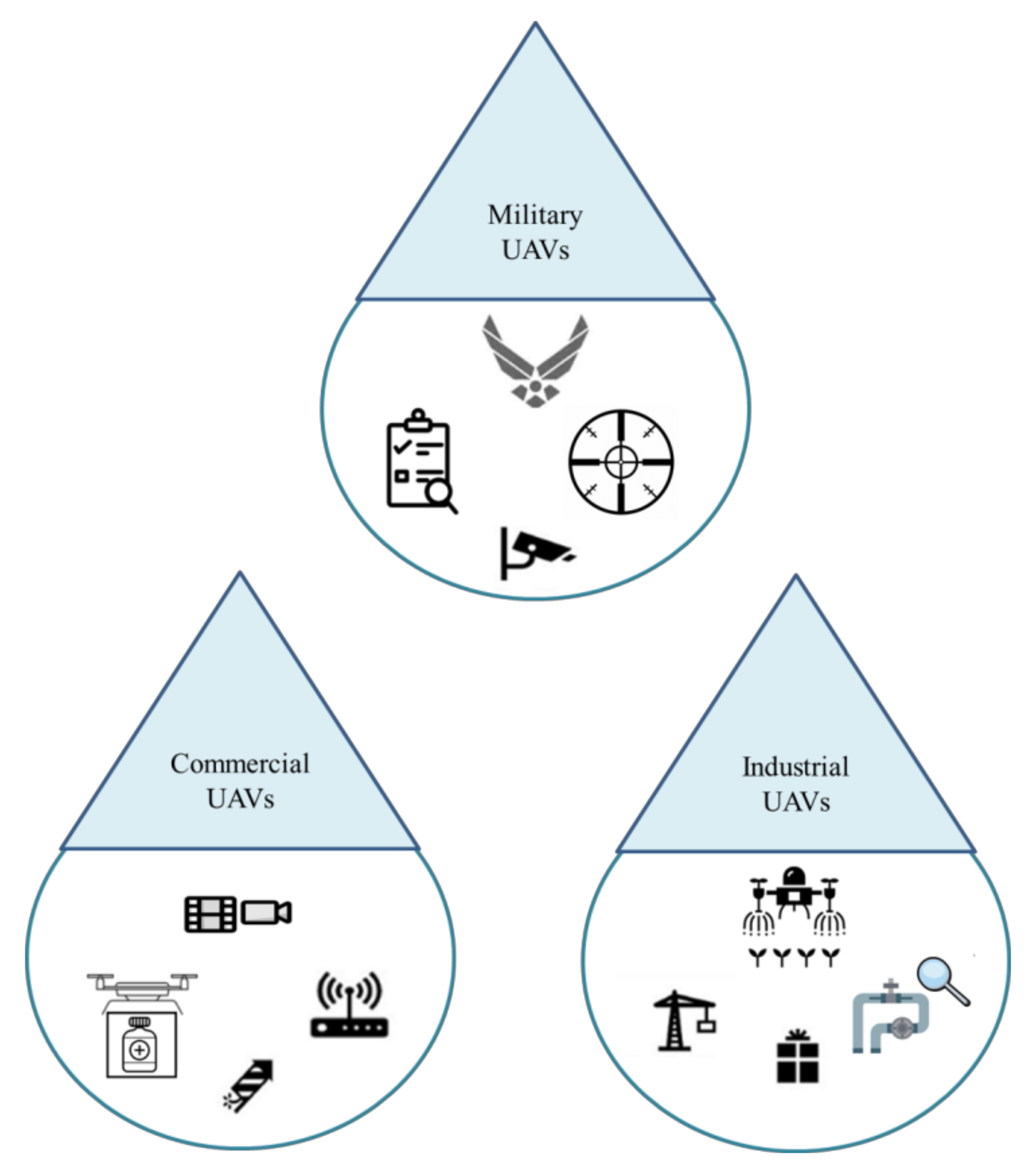 Figure 1. Applications of drones in diverse sectors.
Figure 1. Applications of drones in diverse sectors.Figure 2 shows that the UAV market is expected to reach $43 billion in total sales by 2025. UAVs are intended to be controlled remotely, either through predefined trajectories or through a radio controller. UAVs are now essential components in both civilian and military applications. UAVs, on the other hand, are energy-hungry devices that deplete batteries within minutes of operation. Due to limited battery capacity, UAVs have short flight times. In most cases, the traditional battery swapping method is used, in which a drone makes frequent trips to a charging station where the depleted battery is removed and a fully charged battery is installed. However, this physical battery swapping method necessitates human assistance, affecting UAV operations and causing significant service disruptions in remote areas.
These charging techniques are divided into two categories on the basis of transmission distance range: near-field transmission and far-field transmission. Table 1 summarizes different charging techniques to charge UAVs. The energy limitation of UAVs is also addressed through motion control functions and optimization algorithms to enhance energy efficiency [5][6]. However, these efforts cannot fully eliminate these issues as drones are still required to visit charging stations when their batteries are drained. Furthermore, solar-powered drone technology has been proposed to harvest energy from the sun. However, this solar power feature cannot be embedded in small drones. This solar energy harvesting feature also depends on flight weather conditions e.g., drones cannot properly harvest energy at night or on cloudy days, which leads to the UAV’s substandard performance.
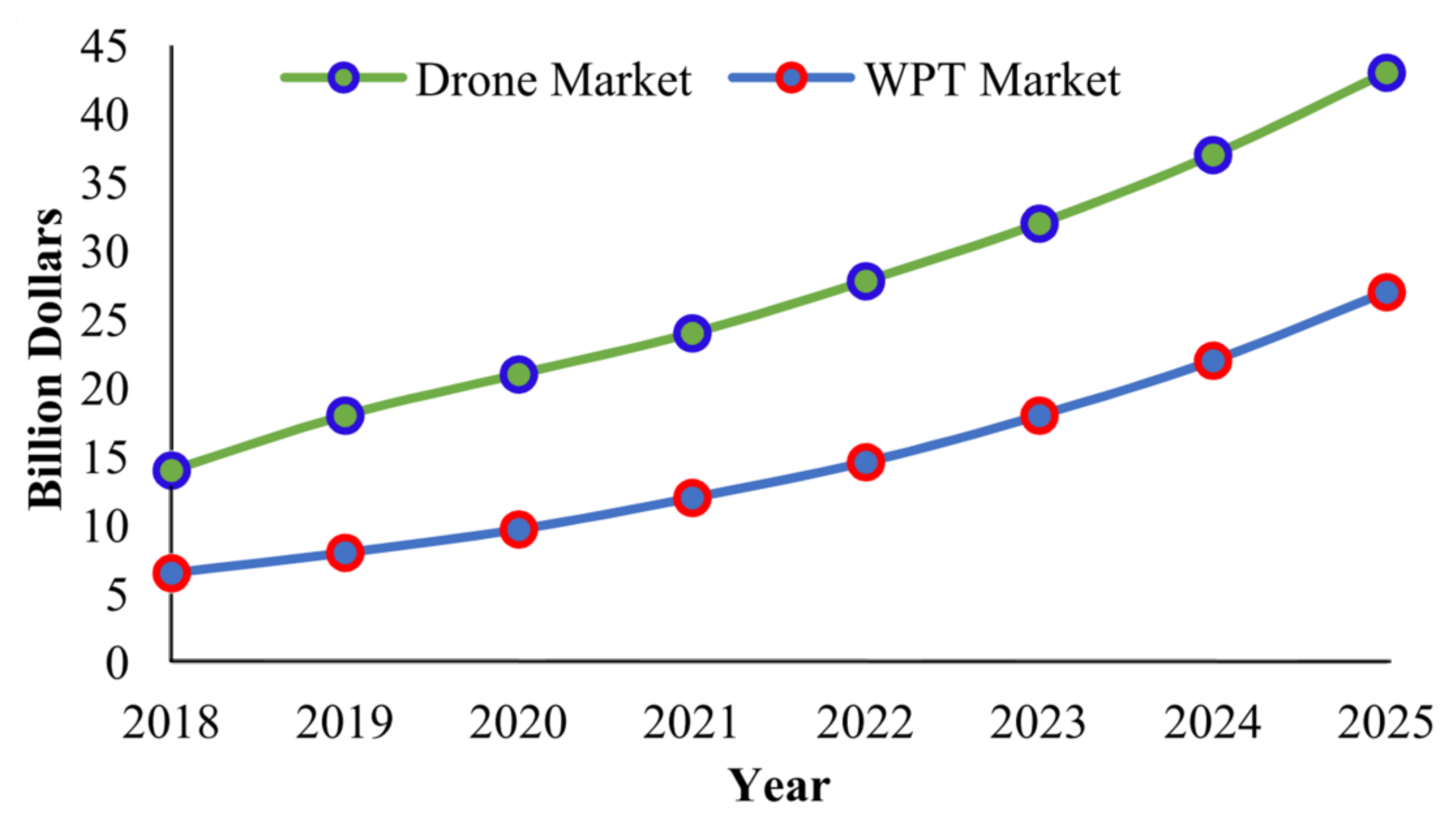 Figure 2. Statistics of Drones and WPT market growth [7].
Figure 2. Statistics of Drones and WPT market growth [7].Table 1. Charging techniques to charge UAVs [4].
| EMF Based Charging | Charging Type | Non-EMF Based Charging | Charging Type |
|---|---|---|---|
| Capacitive charging | Static charging up to a few mm | Gust soaring | In-flight charging |
| Inductive charging | Static charging up to a few cm | PV integrated | In-flight charging |
| Magnetic resonance charging | Static charging up to a few cm | Laser beaming | In-flight charging |
| Battery dumping | In-flight charging |
2. Battery Charging Techniques for UAVs
Drones are currently used in a variety of applications, including military, power line monitoring, forest monitoring, disaster prevention and smart agriculture [8][9]. Drones carry different types of payloads such as GPS, infrared cameras, batteries and sensors as delivery vehicles. These drones usually carry high energy batteries, e.g., lithium batteries, which support flight times of 20–40 min [10]. However, range and endurance are critical challenges in UAVs due to the limited battery capacity. It is not feasible to increase the battery size of UAVs because it will increase weight, which is another critical concern. Several research studies have addressed battery charging of UAVs, but it requires an intensive investigation by the research fraternity. Jawad et al. [8] suggested three ways to enhance flying time: (i) Drones can be equipped with high battery capacity but it can increase the drone weight. (ii) Battery swapping can be achieved after landing the drone. However, this also causes complexity and high cost when swapping the system. (iii) Recharging can be done at the base station of the drone. Charging can be achieved through a wired or wireless power transfer (WPT) system [11].
2.1. Battery-Powered UAVs
Small drones are typically battery-powered and batteries are critical components of these drones [12]. They improve the flexibility and simplicity of the propulsion system. Moreover, battery-powered drones offer cost-effectiveness and enhanced flight time. However, small UAVs have limited battery endurance due to low weight carrying capacity and can travel up to 90 min on LiPo batteries [13]. Small scale UAVs are mostly suitable for commercial applications. Furthermore, Lithium batteries are installed in small UAVs due to their high energy and light weight. Table 2 illustrates a comparison of different batteries. Donateo et al. [14] evaluated different batteries on the basis of state of charge (SOC) for a desired operation. Similarly, the researcher in [15] investigated parameters which impact the performance of battery-powered UAVs. Battery-powered UAVs face the critical challenge of reduced autonomy. Several research studies have focused on enhancing battery performance to extend UAV mission time. Moreover, safety and stability concerns have been reported as a result of energy density enhancement [16]. Thus, several approaches have been proposed to overcome these limitations, such as super capacitors, solar cells, fuel cells and hybrid charging technologies.
Table 2. Comparison of different batteries [17].
| Characteristics | Li-S | LiPo | Ni-Mh | Ni-Cd |
|---|---|---|---|---|
| Specific power (W/kg) | 600 | 2800 | 900 | 300 |
| Energy density (Wh/L) | 350 | 300 | 300 | 100 |
| Specific energy (Wh/kg) | 350 | 180 | 80 | 40 |
2.2. Battery Swapping
To overcome the limitation of battery capacity, some studies have proposed a battery swapping method to recharge drained batteries of UAVs [18]. The battery swapping method is partially autonomous. It is conducted with human assistance or automatically. In the literature, two techniques have been reported for battery swapping: swapping and hot swapping [19]. In hot swapping, drained batteries are replaced with fully charged batteries while the UAV keeps operating. Hot swapping offers the benefit of allowing the UAV to activate and rejoin its operation. While in swapping, UAVs with drained batteries are replaced with another UAV with fully charged batteries. Figure 3 presents an illustration of swapping and hot swapping techniques. Battery swapping techniques consist of three components: (i) a battery swap station; (ii) UAV swarms; and (iii) a control system for managing UAV swarms. Battery swap stations include contact mechanism, landing infrastructure, onboard circuits and ground electronics. In [20], the researchers presented an economic evaluation for recharging of UAVs by considering system complexity, coverage and cost. Multi-UAV systems and cooperative algorithms are proposed to offer continuous service by UAVs. Similarly, the researchers in [21] proposed an automated system to quickly swap a depleted battery of a UAV along with charging several other batteries. In [22], the researchers reported an automated method to swap UAV batteries to support persistent UAV missions. The proposed dual-drum structure enables the efficient swapping of eight batteries. In [21], the researchers briefly discussed the design mechanisms of autonomous swapping stations. In [23], the researchers demonstrated a swapping system for accurate landing, UAV healthy monitoring and energy management. In a recent study [24], the researchers proposed a patrolling algorithm to optimize UAV trajectory and battery swapping. Furthermore, battery swapping techniques also cause some serious concerns, such as GCS feasibility, landing issues, charging/discharging time, limited applications, increased swapping agents, high cost and system complexity.
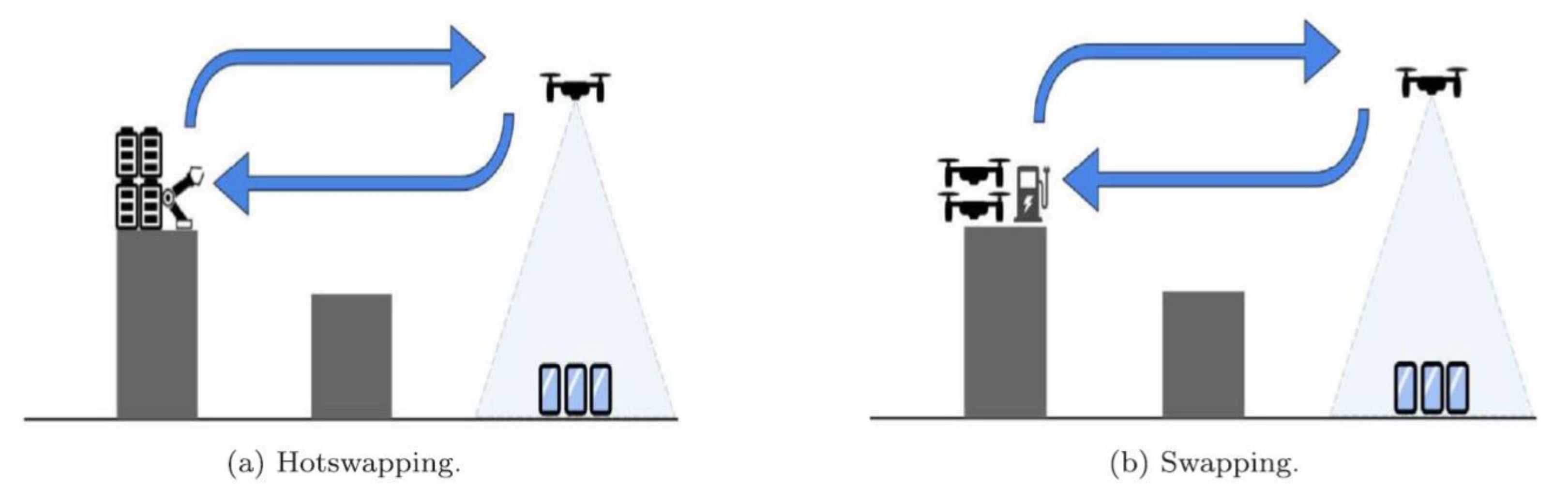 Figure 3. Swapping vs. hot swapping technique [25].
Figure 3. Swapping vs. hot swapping technique [25].2.3. Dynamic Soaring
Dynamic or gust soaring is based on the behaviour of albatrosses and prolongs UAV mission duration [26]. The key principle is to gain energy from airflow and wind. Figure 5 presents an illustration of dynamic soaring maneuvering of an albatross. Figure 4 shows that an albatross can gain wind velocity without wasting energy through the alignment of its body and wing position. Dynamic soaring is useful to attain velocity from ambient energy sources without discharging the battery of a UAV. Consequently, it will enhance the durability of UAVs. However, there are several critical concerns related to dynamic soaring. The major drawback is that dynamic soaring is only suitable for fixed-wing UAVs that have sufficient wing geometry to harness the energy from the wind. However, this technology is not applicable to multi-rotor drones due to varying geometries. Another major drawback is the intermittent nature of wind. Thus, the drone will not be able to use this feature in the absence of wind as it is highly dependent on these environmental conditions. Furthermore, to effectively mimic the maneuver and harness maximum energy, fixed-wing UAVs must be equipped with a sophisticated control system.
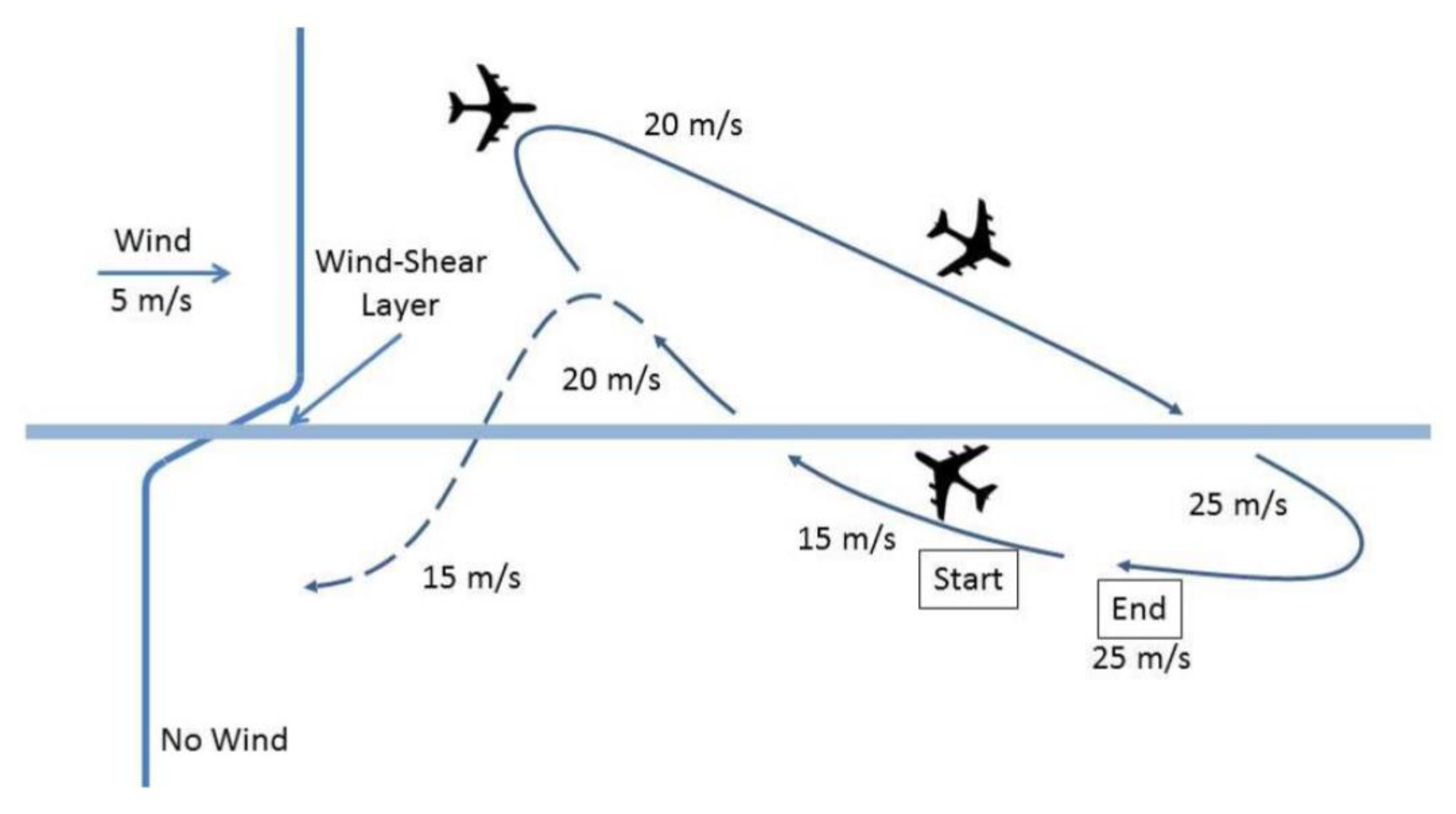 Figure 4. Dynamic soaring maneuver [27].
Figure 4. Dynamic soaring maneuver [27].2.4. Tethered UAVs
Tethered UAVs can support unlimited autonomy. This technology does not require physical landing on a charging station and avoids repeated recharging. In this technology, UAVs can get a continuous power supply through a connecting cable from a charging station. This technology ensures efficient and safe data transmission. In general, copper wires are used as power supply lines. However, optical fiber technology is also used in the tethered UAV area. Fiber optic cable supports kilowatts of power transfer using high intensity optical beams. Optical fiber technology can significantly reduce the UAV payload and power lines compared to copper lines [28]. Two examples of tethered UAVs are presented in Figure 5. Muttin [29] proposed a maritime application-based tethered UAV for detecting oil pollution from ships. Moreover, Gu et al. [30] demonstrated a tethered UAV for nuclear power plants to support extremely long-endurance operations. In [31], the researchers proposed a method for UAV localization in an indoor environment using a quasi-taut tether. In a recent study [32], the researchers used UAV tethered technology for 3D deployment of aerial base stations.
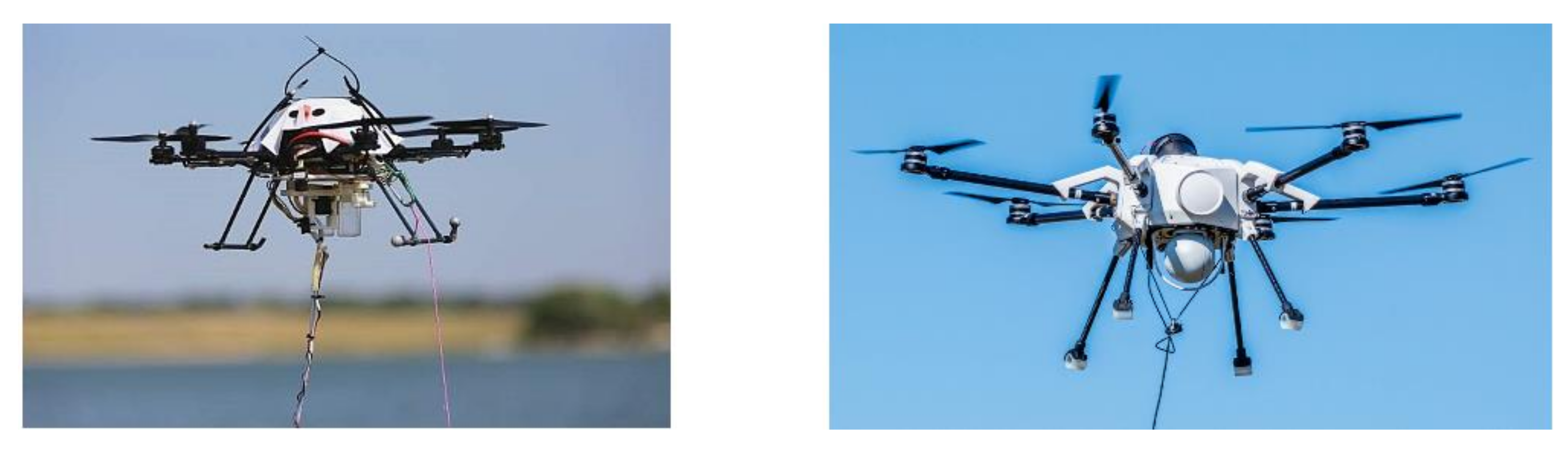 Figure 5. Tethered UAVs [
Figure 5. Tethered UAVs [2.5. Charging from a Power Line
Power lines are abundant in both rural and urban areas. These power lines can be used as a source of power and electricity supply. Several research studies have investigated tethering UAV technology to power lines to deliver the required energy to UAVs. The technique is viable to efficiently transmit data and power to UAVs. In [27], researchers proposed the recharging of UAVs through power lines. An important technology to implement this technology is known as power line perching. It is based on landing a UAV on a current carrying conductor to recharge itself. It involves two aspects. Firstly, the process of guiding the UAV to the location of the power lines. Secondly, the charging process to deliver power to the UAVs. In addition, the conversion of high voltage energy from power lines into low voltage for the UAV’s battery must be taken into account. In the context of landing maneuvers, it is worth noting that navigational electronics reading will be highly affected by the EM field. Researchers from the Massachusetts Institute of Technology (MIT) proposed a solution to overcome this challenge [35][36]. The researchers developed an internal measurement unit within the UAV which can guide it according to the EM field of power lines. The proposed mechanism involves a particle filter and synchronous demodulation. Though this proposed mechanism is promising, it involves high computational power and complex signal processing.
2.6. Fuel Cell (FC)
To achieve long missions and enhance the battery endurance of UAVs, researchers have suggested the implementation of fuel cells (FC) technology. A typical UAV LiPo battery has 250 Wh/kg of energy, whereas compressed FC has 1000 Wh/kg of energy [37]. Furthermore, refueling in FC is faster and more efficient than battery charging and swapping technology [38]. Several technologies are being implemented in the FC industry. Most of these are based on temperature characterization, electrolytes, catalyst and chemical criteria. In [39], Sharaft et al. evaluated the performance of frequently used FCs in UAVs, e.g., Solid Oxide Fuel Cell (SOFC), Methanol Fuel Cell (MFC) and Proton Exchange Membrane Fuel Cell (PEMFC). It can be concluded that the most frequently used FCs in UAVs are PEMFC. Several leading research institutes have dedicated their efforts to FC technology. Georgia Tech University experimentally demonstrated a 500 W FC-powered UAV system, while the Office of Naval Research (ONR) set a breakthrough record for an FC-powered UAV for the highest endurance of 48 h [40]. Furthermore, a Korean aerospace research institute demonstrated an FC-powered UAV with landing, vertical takeoff, monitoring and hovering capabilities [41]. Although FC technology has appealing advantages, such as reduced power losses and reduced carbon dioxide, FC technology is hampered by a sluggish dynamic response causing voltage fluctuations [42]. Moreover, absorption of excessive energy is difficult, which leads to a cold start. Similarly, storage of some FC, such as Hydrogen FC as shown in Figure 6, under low temperature and high pressure is another critical concern.
 Figure 6. Hydrogen-powered UAV [43].
Figure 6. Hydrogen-powered UAV [43].In [44], Cai et al. briefly discussed different types of batteries, such as Ni-Mh, Ni-Cd and Li-ion. Researchers carried out a comparison of these batteries with fuel cells considering different parameters such as endurance, efficiency, temperature effect, discharging and power densities. Figure 7 presents a comparison of FCs, super capacitors and batteries considering power density vs. energy density aspects. It clearly indicates that FCs outperform other resources in terms of energy density. In [45], the researchers investigate a drone for mobile crane inspection. As the flight time of drones is short for commercial applications, the researchers used lithium-ion batteries and proton exchange membrane cells to overcome this short flight time. The researchers carried out analysis of both the environmental impact and the economic point of view. Lightweight fuel cells resulted in being more expensive than Li-ion batteries.
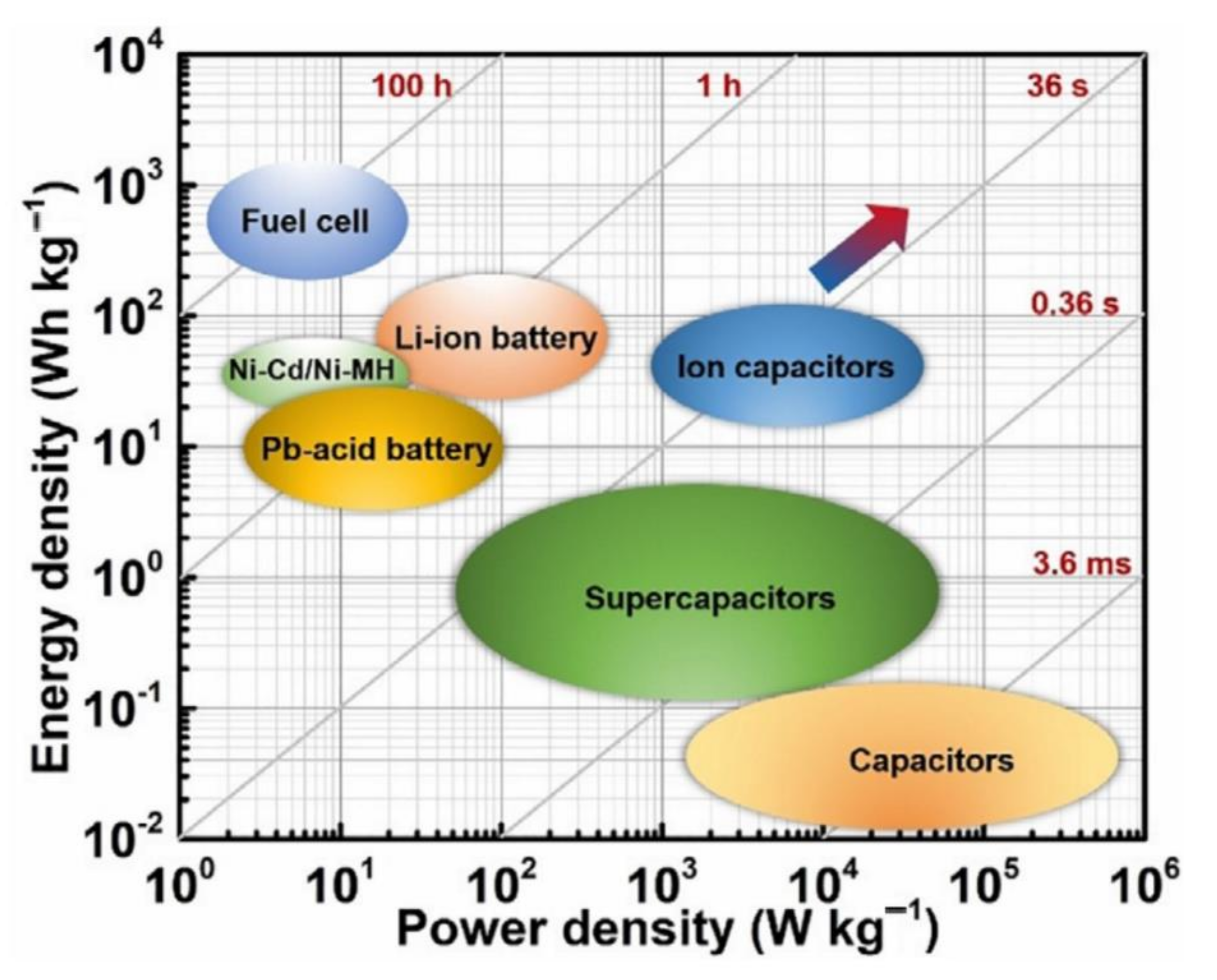 Figure 7. The comparison of energy density and power density for different energy storage devices [46].
Figure 7. The comparison of energy density and power density for different energy storage devices [46].2.7. Super Capacitor (SC)
Battery-powered UAVs are subject to high energy density, sluggish response and limited lifespan. On the other hand, FC-powered UAVs are subject to sluggish dynamic response, which can cause voltage instabilities. In such cases, super capacitor technology emerges as a promising alternative to UAVs with a faster energy storage capability. This is due to the fact that SCs are characterized by reduced voltage instability, high lifespan, low maintenance cost, charging tolerance, wide operating temperature range, low energy density, fast response and higher energy [47]. The SC offers various benefits in terms of reinforced power density, rapid response of energy management system (EMS) and supplying architecture. Several research studies have focused on integration of SCs into UAVs. In [48][49], the researchers carried out critical analysis of a hybrid UAV propulsion system containing FC, FC and battery. These studies indicate a good performance of SC on system load stability and dynamic response. Some studies [50][51] dedicated to hybrid UAV models indicate a significant contribution of SC in absorbing power instability and supplying peak power. Table 3 summarizes a comparison of the main characteristics of SCs and batteries.
Table 3. Comparison between batteries and super capacitor [52].
| Type | Energy Density (Wh/kg) | Power Density (W/kg) | Cycle Life (Times) | Efficiency of Charging and Discharging (%) | Advantages | Drawbacks |
|---|---|---|---|---|---|---|
| Lead-acid battery | 30–40 | 200–300 | 300–400 | 75 | High recycle rate, low cost | Poor performance at low temperature |
| Ni-Mh battery | 60–80 | 800–1500 | >1000 | 75 | Long lifespan, high energy density | High manufacturing cost, high self-discharging rate |
| Li-ion battery | 100–120 | 600–2000 | >1000 | 90 | Long cycle life, lightweight, high energy density, high voltage | Security risk, non-overcharge, life reduce at high temperature |
| Super capacitor | 4–15 | 1000–10,000 | >10,000 | 85–98 | Fast charging and discharging speed, pollution-free and extremely long life | Low energy density |
2.8. Photovoltaic Cell-Based UAV Charging
PV cells are commonly considered to charge the batteries and enhance the flight time of UAVs. PV cells make use of sunlight to charge UAV batteries. Both the PV cells and the batteries utilized in a UAV are used in this way. Whenever sunlight is present, the required power is provided by PV cells and in the absence of sunlight, batteries are used to deliver the required power to the UAV. Research work on solar-powered UAVs reported that several parameters play key roles such as temperature intensity, angel of incidence of sunlight, geometry and the position of PV cells [53]. This technique is not suitable in scenarios with insufficient sunlight. There is a need to adopt alternative strategies whenever sunlight is not present to continue UAV flight. These methods include additional power supplies, enhanced battery power or PV cell size and automatic position adjustment according to sun position. As PV cells require a certain payload capacity and wing length of the UAV, it is feasible for fixed-wing UAVs. Moreover, environmental conditions such as humidity, temperature, fog and clouds reduce the system efficiency or reliability.
Solar energy-based UAVs have gained the attention of many researchers. Figure 8 presents solar-powered UAVs. Solar-powered aircrafts are currently being used for power line inspection, forest fire fighting, border surveillance and high-altitude communication. This technology can be used to supersede environmental, scientific and communication satellites used for military and civilian applications. Sufficient flight power can be achieved through the appropriate selection of PV cells and taking into account the efficiency and weight is the key to ensuring long flight times and high endurance in solar-powered UAVs. Different solar cells and materials are used to attain cost-effectiveness and high efficiency. Some studies suggest mono-crystalline silicon PV cells due to their affordable cost and high efficiency [54]. Furthermore, mono-crystalline silicon PV cells offer high flexibility which supports easy integration in the UAV wing. It is still important to investigate PV cells with novel designs, energy management strategies and manufacturing materials to ensure high efficiency and high availability [55]. The research fraternity should focus more on material science developments as low photoelectric efficiency is a major limiting factor in this area [56]. Some researchers proposed an effective approach for the optimization of solar-powered UAV flight trajectories to gain more solar radiation, along with low consumption of mechanical energy [57].
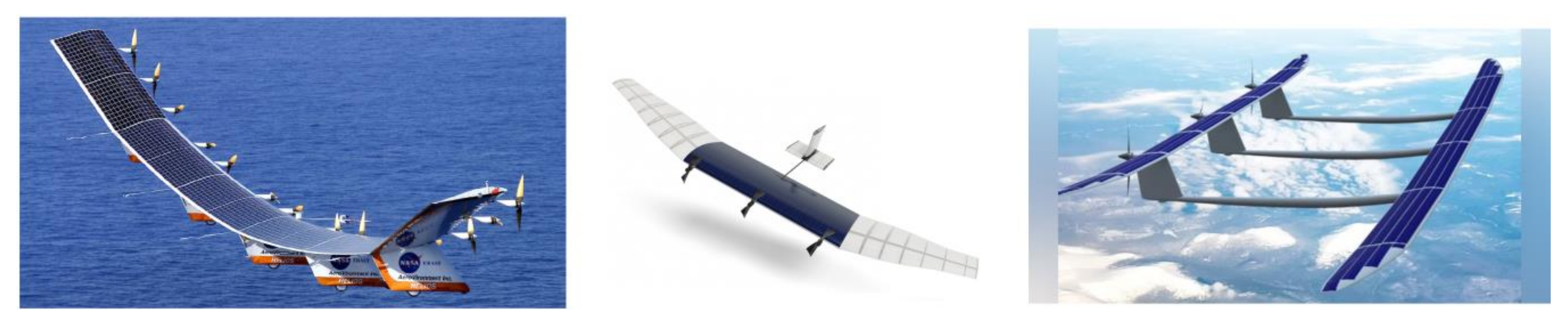 Figure 8. Solar-powered UAVs [
Figure 8. Solar-powered UAVs [References
- Hassija, V.; Saxena, V.; Chamola, V. Scheduling drone charging for multi-drone network based on consensus time-stamp and game theory. Comput. Commun. 2019, 149, 51–61.
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700.
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762.
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A Review on UAV Wireless Charging: Fundamentals, Applications, Charging Techniques and Standards. IEEE Access 2021, 9, 69235–69266.
- Tran, D.H.; Vu, T.X.; Chatzinotas, S.; ShahbazPanahi, S.; Ottersten, B. Coarse trajectory design for energy mini-mization in UAV-enabled. IEEE Trans. Veh. Technol. 2020, 69, 9483–9496.
- Abdulla, A.E.A.A.; Fadlullah, Z.M.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. Toward Fair Maximization of Energy Efficiency in Multiple UAS-Aided Networks: A Game-Theoretic Methodology. IEEE Trans. Wirel. Commun. 2014, 14, 305–316.
- Drone Market Report; Drone Ind. Insights UG: Hamburg, Germany,, 2024.
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless Power Transfer with Magnetic Resonator Coupling and Sleep/Active Strategy for a Drone Charging Station in Smart Agriculture. IEEE Access 2019, 7, 139839–139851.
- Valente, J.; Sanz, D.; Barrientos, A.; Del Cerro, J.; Ribeiro, Á.; Rossi, C. An Air-Ground Wireless Sensor Network for Crop Monitoring. Sensors 2011, 11, 6088–6108.
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16.
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless Power Transfer Technology Applied to an Autonomous Electric UAV with a Small Secondary Coil. Energies 2018, 11, 352.
- Khofiyah, N.A.; Maret, S.; Sutopo, W.; Nugroho, B.D.A. Goldsmith’s Commercialization Model for Feasibility Study of Technology Lithium Battery Pack Drone. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology (ICEVT), Surakarta, Indonesia, 30–31 October 2018; pp. 147–151.
- Verstraete, D.; Lehmkuehler, K. Wong Design of a fuel cell powered blended wing body UAV. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Houston, Texas, USA, 9–15 November 2012; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 45172, pp. 621–629.
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819.
- Traub, L.W. Range and Endurance Estimates for Battery-Powered Aircraft. J. Aircr. 2011, 48, 703–707.
- Mike, R. Whitepaper: Fuel Cell-Based Energy Systems for Commercial UAVs; Unmanned Systems Technology: Aliso Viejo, CA, USA, 2018.
- Hassanalian, M.; Radmanesh, M.; Sedaghat, A. Increasing Flight Endurance of MAVs using Multiple Quantum Well Solar Cells. Int. J. Aeronaut. Space Sci. 2014, 15, 212–217.
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124.
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Deployment of Battery Swapping Stations for Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In International Conference on Information and Software Technologies; Springer: Cham, Switzerland, 2018; pp. 73–87.
- Kemper, F.P.; Suzuki, K.A.; Morrison, J.R. UAV consumable replenishment: Design concepts for automated ser-vice stations. J. Intell. Robot. Syst. 2011, 61, 369–397.
- Suzuki, K.A.O.; Filho, P.K.; Morrison, J.R. Automatic Battery Replacement System for UAVs: Analysis and Design. J. Intell. Robot. Syst. 2011, 65, 563–586.
- Michini, B.; Toksoz, T.; Redding, J.; Michini, M.; How, J.; Vavrina, M.; Vian, J. Automated battery swap and re-charge to enable persistent UAV missions. Aerosp. 2011, 2011, 1405.
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3335–3340.
- Zhang, X.; Duan, L. Optimal Patrolling Trajectory Design for Multi-UAV Wireless Servicing and Battery Swapping. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6.
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as Mobile Infrastructure: Addressing Battery Lifetime. IEEE Commun. Mag. 2019, 57, 132–137.
- Richardson, P.L. Upwind dynamic soaring of albatrosses and UAVs. Prog. Oceanogr. 2015, 130, 146–156.
- Lu, M.; James, A.; Bagheri, M. Unmanned aerial vehicle (UAV) charging from powerlines. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017; pp. 1–6.
- Powerlight Technologies—Power Over Fiber Case Study—Aerial Applications. Available online: https://powerlighttech.com/power-over-fiber-case-study-aerial-applications (accessed on 27 May 2022).
- Muttin, F. Umbilical deployment modeling for tethered UAV detecting oil pollution from ship. Appl. Ocean Res. 2011, 33, 332–343.
- Gu, B.W.; Choi, S.Y.; Choi, Y.S.; Cai, G.; Seneviratne, L.; Rim, C.T. Novel Roaming and Stationary Tethered Aerial Robots for Continuous Mobile Missions in Nuclear Power Plants. Nucl. Eng. Technol. 2016, 48, 982–996.
- Xiao, X.; Fan, Y.; Dufek, J.; Murphy, R. Indoor uav localization using a tether. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6.
- Kishk, M.A.; Bader, A.; Alouini, M.-S. On the 3-D Placement of Airborne Base Stations Using Tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215.
- ENG ‘kites’: Tethered Drones for Newsgathering. Available online: https://www.rtdna.org/article/eng_kites_tethered_drones_for_newsgathering (accessed on 29 May 2022).
- Anit-Terror Drill Monitoring with Orion Tethered UAV. Available online: https://elistair.com/anti-terror-drill-monitoring-with-orion-tethered-uav/ (accessed on 27 May 2022).
- Moore, J.; Tedrake, R. Magnetic localization for perching UAVs on powerlines. In Proceedings of the 2011 IEEE/RSJ In-ternational Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2700–2707.
- Moore, J.; Tedrake, R. Powerline perching with a fixed-wing UAV. In Proceedings of the AIAA Aerospace Conference and AIAA Unmanned… Unlimited Conference, Seattle, WA, USA, 6–9 April 2009; p. 1959.
- Gong, A.; MacNeill, R.; Verstraete, D.; Palmer, J.L. Analysis of a fuel-cell/battery/supercapacitor hybrid pro-pulsion system for a UAV using a hardware-in-the-loop flight simulator. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 12–14 July 2018; pp. 1–17.
- Kim, T.; Kwon, S. Design and development of a fuel cell-powered small unmanned aircraft. Int. J. Hydrogen Energy 2012, 37, 615–622.
- Sharaf, O.Z.; Orhan, M.F. An overview of fuel cell technology: Fundamentals and applications. Renew. Sustain. Energy Rev. 2014, 32, 810–853.
- Swider-Lyons, K.; Stroman, R.; Page, G.; Schuette, M.; Mackrell, J.; Rodgers, J. Hydrogen fule cell propulsion for long endurance small UVAs. In Proceedings of the AIAA Centennial of Naval Aviation Forum “100 Years of Achievement and Progress”, Virginia Beach, VA, USA, 21–22 September 2011; p. 6975.
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177.
- Williams, M.C.; Suzuki, A.; Miyamoto, A. Assessment of the Performance of Fuel Cells and Batteries. ECS Trans. 2013, 51, 183–192.
- Hydrogen Powered UAV. Available online: https://www.rotordronepro.com/hydrogen-powered-uav/ (accessed on 27 May 2022).
- Cai, Q.; Brett, D.; Browning, D.; Brandon, N. A sizing-design methodology for hybrid fuel cell power systems and its application to an unmanned underwater vehicle. J. Power Sources 2010, 195, 6559–6569.
- Belmonte, N.; Staulo, S.; Fiorot, S.; Luetto, C.; Rizzi, P.; Baricco, M. Fuel cell powered octocopter for inspection of mobile cranes: Design, cost analysis and environmental impacts. Appl. Energy 2018, 215, 556–565.
- Zhang, Y.; Jiang, J.; An, Y.; Wu, L.; Dou, H.; Zhang, J.; Zhang, Y.; Wu, S.; Dong, M.; Zhang, X.; et al. Sodium-ion capacitors: Materials, Mechanism, and Challenges. ChemSusChem 2020, 13, 2522–2539.
- Aneke, M.; Wang, M. Energy storage technologies and real life applications—A state of the art review. Appl. Energy 2016, 179, 350–377.
- Gong, A.; Verstraete, D. Role of battery in a hybrid electrical fuel cell UAV propulsion system. In Proceedings of the 52nd AIAA Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014.
- Lee, B.; Park, P.; Kim, C. Power Managements of a Hybrid Electric Propulsion System Powered by Solar Cells, Fuel Cells, and Batteries for UAVs. In Handbook of Unmanned Aerial Vehicles; George, J.V., Kimon, P.V., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 495–524.
- Jansen, R.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J. Overview of NASA Electrified Aircraft Propulsion (EAP) Research for Large Subsonic Transports. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017.
- Hung, J.; Gonzalez, L. On parallel hybrid-electric propulsion system for unmanned aerial vehicles. Prog. Aerosp. Sci. 2012, 51, 1–17.
- Wang, H.; Wang, Q.; Hu, B. A review of developments in energy storage systems for hybrid excavators. Autom. Constr. 2017, 80, 1–10.
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for solar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91.
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and Development of a Small Solar-Powered UAV for Environmental Monitoring Application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319.
- Hempe, D. Unmanned Aircraft Systems in the United States. In Proceedings of the US/Europe International Safety Conference, June 2006; Available online: http://slideplayer.com/slide/8117203/ (accessed on 22 April 2022).
- Wu, J.; Wang, H.; Huang, Y.; Su, Z.; Zhang, M. Energy Management Strategy for Solar-Powered UAV Long-Endurance Target Tracking. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1878–1891.
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Chen, X.Q. Reviews of methods to extract and store energy for solar-powered air-craft. Renew. Sustain. Energy Rev. 2015, 44, 96–108.
- Helios Prototype Flying Wing. Available online: https://www.nasa.gov/centers/dryden/multimedia/imagegallery/Helios/ED01-0209-2.html (accessed on 29 May 2022).
- Facebook Reveals Its Plan for Solar-Powered UAVs. Available online: https://www.ainonline.com/aviation-news/2014-03-28/facebook-reveals-its-plan-solar-powered-uavs (accessed on 29 May 2022).
- Prototype Solar-Powered, High-Altitude UAV Undergoing Flight Tests. Available online: https://www.electronicdesign.com/technologies/alternative-energy/article/21199573/prototype-solarpowered-highaltitude-uav-undergoing-flight-tests (accessed on 29 May 2022).
More
Information
Subjects:
Engineering, Electrical & Electronic
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
4.7K
Revisions:
2 times
(View History)
Update Date:
08 Jul 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No