Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Muntasir Mahmud | -- | 2089 | 2022-06-17 16:11:58 | | | |
| 2 | Sirius Huang | Meta information modification | 2089 | 2022-06-20 03:18:52 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Mahmud, M.; , .; Younis, M.F.; Choa, F. Photoacoustic-Based Communication and Localization. Encyclopedia. Available online: https://encyclopedia.pub/entry/24169 (accessed on 25 July 2026).
Mahmud M, , Younis MF, Choa F. Photoacoustic-Based Communication and Localization. Encyclopedia. Available at: https://encyclopedia.pub/entry/24169. Accessed July 25, 2026.
Mahmud, Muntasir, , Mohamed F. Younis, Fow-Sen Choa. "Photoacoustic-Based Communication and Localization" Encyclopedia, https://encyclopedia.pub/entry/24169 (accessed July 25, 2026).
Mahmud, M., , ., Younis, M.F., & Choa, F. (2022, June 17). Photoacoustic-Based Communication and Localization. In Encyclopedia. https://encyclopedia.pub/entry/24169
Mahmud, Muntasir, et al. "Photoacoustic-Based Communication and Localization." Encyclopedia. Web. 17 June, 2022.
Copy Citation
The photoacoustic mechanism is commonly used in medical imaging. Yet, it has great potential as a means of air to underwater communication. The use of photoacoustic as a cross-medium communication has high potential to morph the classical way of approaching a solution in underwater applications.
photoacoustic
optoacoustic
air-to-underwater communication
cross-medium communication
underwater communication
1. PA Communication Challenges
The nonlinear photoacoustic (PA) is considered the most efficient method to generate acoustic signals in an underwater environment [1]. However, using the nonlinear PA causes generation of vapor clouds in the underwater environment due to the heating effect. These vapor clouds prohibit further generation of acoustic signals at the same location until the cloud decimates in the water [2]. Such vapor cloud decimation poses a theoretical bound on the speed of generating acoustic signal when nonlinear PA techniques are used and produces an upper bound on the achievable communication bitrate. To evade the vapor cloud, Blackmon et al. [1] suggest using a scanning laser that focuses the laser beam at different points in a region to avoid possible presence of vapor clouds.
Another key issue is that the photoacoustic effect is hybrid by nature. While a high energy light signal is used to transmit encoded data from the transmitter side, at the receiver side, an acoustic signal is received. This hybrid nature makes it very difficult to come up with a suitable modulation/demodulation or encoding/decoding scheme. Moreover, the generated acoustic signal in a PA process is highly directional. One needs to factor such directionality to make a successful communication. By controlling the shape of the plasma, the directionality of the acoustic beam may be controlled. Y. Brelet, et al., [3] have explored the PA effect and studied the shape of the generated underwater acoustic beam. They have found that the directivity of acoustic signal is concentrated on the plane perpendicular to the laser transmission direction.
2. PA Communication Research
Figure 1 shows the general block diagram of air to underwater communication using PA signal. A high-power laser light source is required for PA communication. Typically, a Q switch Nd: YAG laser is used for this kind of application [4]. Then a modulator is used to encode the information that needs to be transmitted. Additional mirrors and lenses might be required to focus the laser light inside the water. Since the generated acoustic signal is very broadband, a hydrophone with high bandwidth efficiency is required at the receiver end. The received signal is then amplified by an amplifier before being decoded.
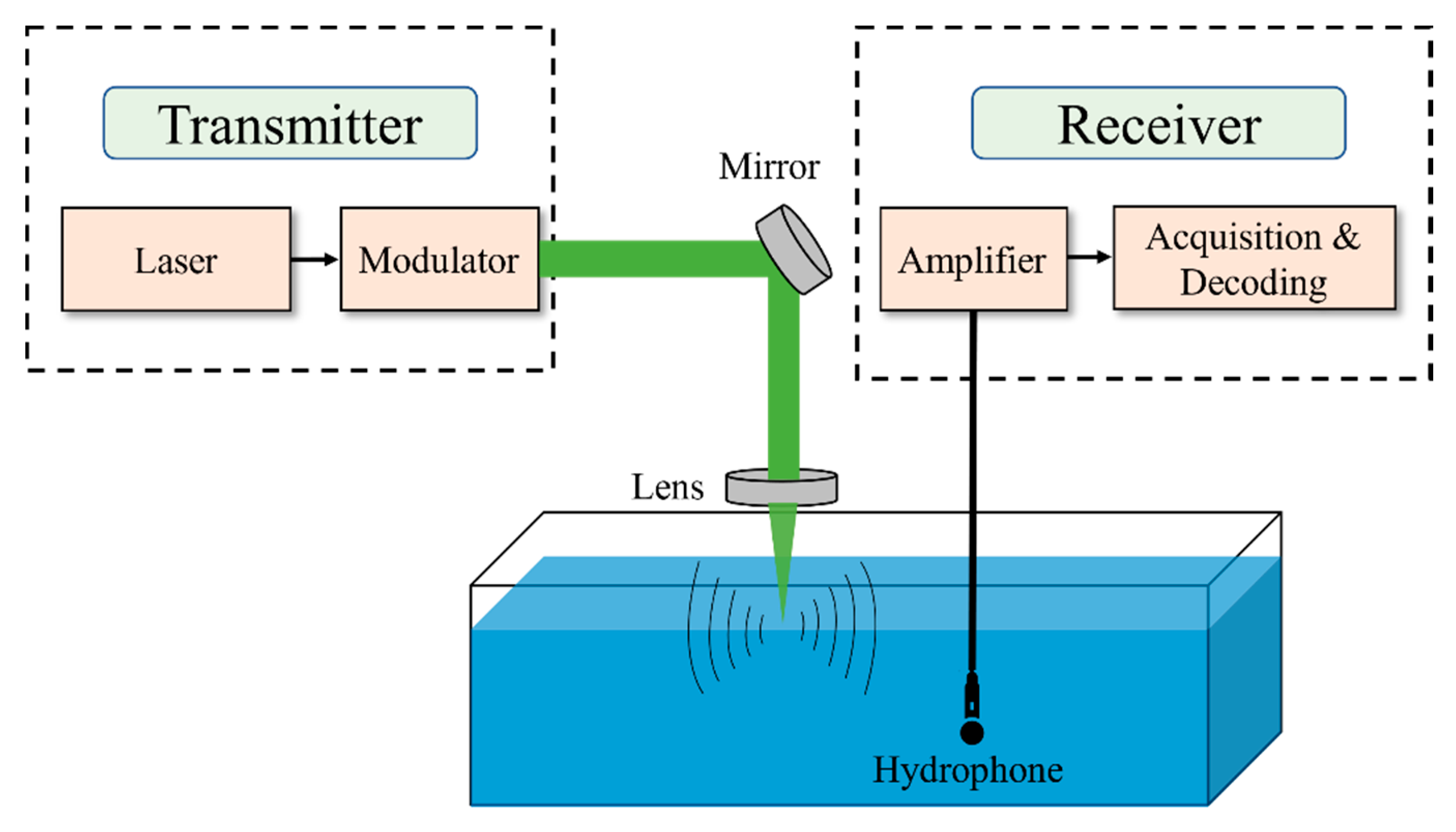
Figure 1. General block diagram of air to underwater photoacoustic communication.
Air to underwater PA communication using the general block diagram in Figure 1 has been the subject of quite a few research studies. In [4] Blackmon implemented different kinds of modulation techniques for linear PA. A mechanical chopper was used to modulate a laser beam at 10 kHz speed. An electro-optic Pockels cell modulator was used to generates different types of modulated signals such as sinusoidal modulation at 10 kHz, 4-bit BPSK modulation, 11 (5 to 15 kHz with 1 kHz spacing), 5 (8 to 12 kHz with 1 kHz spacing), and 2 (10 and 12 kHz) tone MFSK (multi-frequency-shift keyed) modulation, and FSK (frequency-shift keyed) modulation. Table 1 shows the experimental results of acoustic source level (SL) and achievable communication range for such modulation techniques. Here, communication range means in-water communication range.
Table 1. Experimental results of range and sound pressure level for different modulation techniques using linear photoacoustic [4].
| Wave Shape | Laser Energy (J) | Experimental SL (dB re 1 μPa) |
Experimental Range (M) |
|---|---|---|---|
| 10-kHz Chopper | 30 | 113 | 100 |
| 10-kHz Sinewave | 25 | 111.8 | 78 |
| Pulse Train | 25 | 112.1 | 80 |
| 4-Bit PSK | 25 | 106 | 15 |
| 11-Tone MFSK | 25 | 101.1 | 23 |
| 5-Tone MFSK | 25 | 100.7 | 22 |
| 2-Tone MFSK | 25 | 104.4 | 33 |
| 2-Tone FSK | 25 | 104.9 | 25 |
The energy conversion rate for a linear PA process is very low. In order to improve the energy conversion rate, we need to maximize optical energy absorption by the water medium where the light energy is focused in the water medium. This could be done by introducing a passive relay in the water medium where light energy is focused. In [5] Z. Ji et al. used a low-cost passive relay in the air–water interface which improves the energy conversion loss. The cost of those passive relays is as low as US $1. The laser energy loss can reduce up to six orders of magnitude (25 J vs. 27 μJ). The intensity of the generated photoacoustic signal is proportional to the absorption coefficient of the light energy absorbing medium. A contrast agent (passive relay) with high optical absorption coefficient can significantly improve the light energy absorption in the water medium and thus minimizes the need of high laser energy.
The energy conversion can be further improved by introducing a nonlinear PA effect. In a nonlinear PA process, when the light energy exceeds a certain threshold level, plasma is also formed and not just the water medium is heated. The plasma can create a stronger acoustic signal than when pursuing a linear PA process. The intensity and directionality of the acoustic signal depends on the plasma shape. The plasma shape generated by the nonlinear PA process, can be controlled either by varying laser pulse energy or focusing angle of the lens that is used to focus the laser light inside the water medium. In a previous work, the researchers proposed a novel modulation technique by varying the focusing angle of the lens which is named as Optical Focusing-based Adaptive Modulation (OFAM) [6]. The laser induced plasma can be considered as an antenna for the acoustic emission whose shape can be controlled by a varying focusing angle of the laser light. Typically, a shorter plasma is considered as an antenna whose directionality is spherical in shape. On the other hand, an elongated plasma is considered as a non-spherical or highly directional acoustic source. The idea of OFAM is to dynamically control the focal length by using electrically focus-tunable lens. Advanced lenses are available where the focal length of the lens is a function of electrical current [7]. Figure 2 shows how we can generate such different shapes of plasma using focus-tunable lenses and a lens driver. Through rigorous simulations and experiments, it has been shown that OFAM can achieve better bit error rate (BER) performance.
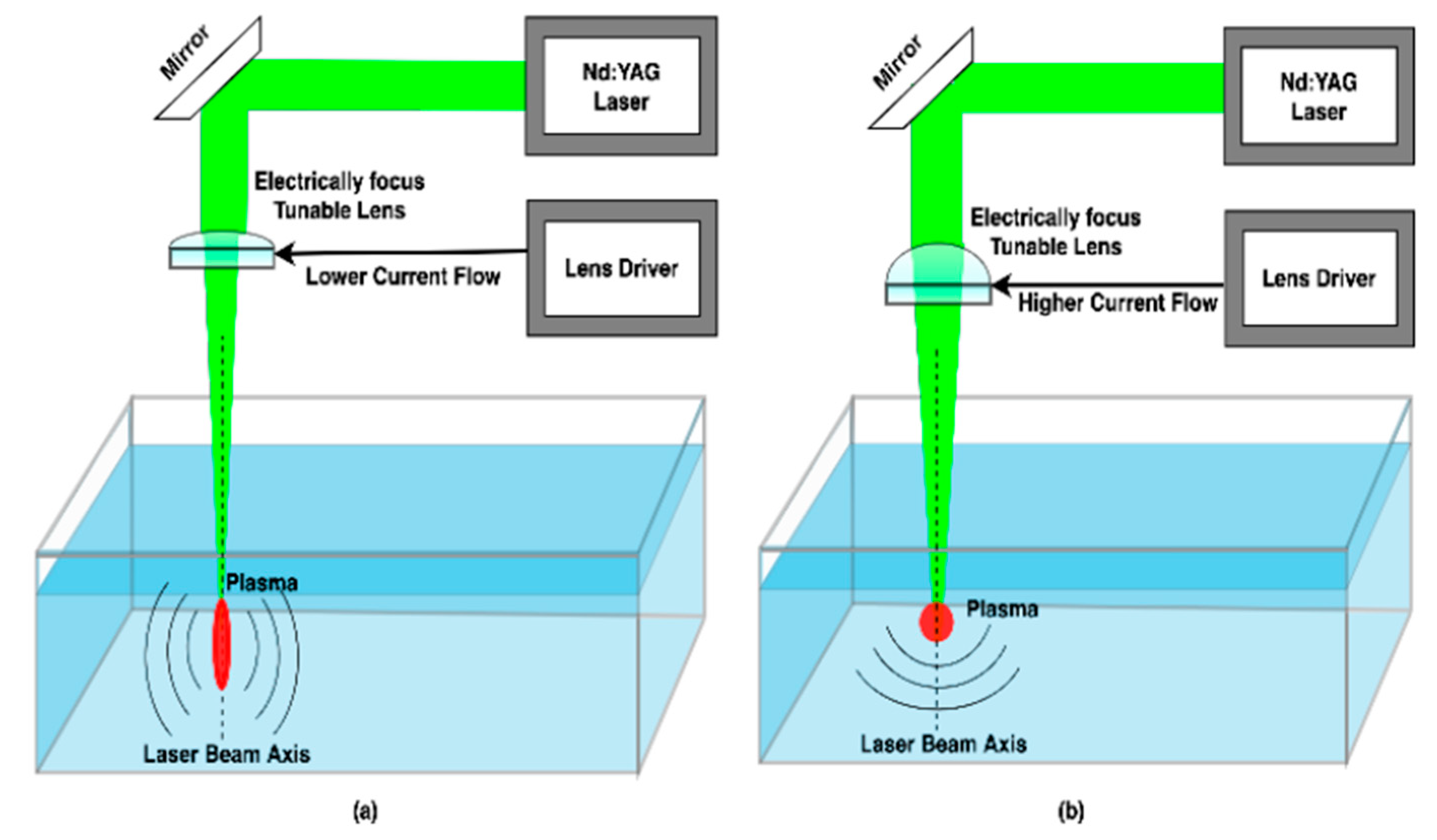
Figure 2. The use of electronically focus-tunable lens to create (a) cylindrical and (b) spherical shape plasma.
The achievable bit rate using PA mechanism is very low (couple of Hz to kHz). So, sending large data like speech is not possible using PA mechanism. An interesting research work has been done by H. Jiang et al., where a speech signal is transmitted using a PA mechanism [8]. A speech recognition method has been proposed where speech is converted to characters and then encoded by the pulsed laser. The encoding process is done by varying the laser pulse repetition rate. Through experiments, they have shown that converting speech into characters can be reduced the required data rate thus PA mechanism can apply to send speech data.
Most of the above works have been done in the lab environment but NRL has successfully done open water demonstration of laser acoustic generation and propagation in 2010 and 2011 at the Lake Glendora Test Facility of Naval Surface Warfare Center, Crane Division [9]. The generated acoustic SL was about 190 dB, and boat-mounted hydrophones measured acoustic pulse propagation at distances up to 300 m (approximately 1000 ft). These field experiments confirmed that there is no significant ultrasonic attenuation at these ranges during acoustic propagation.
3. PA-Enabled Underwater Localization
Node localization is very important for many civil and military applications of underwater networks, particularly knowing where the nodes are, which allows correlation of the collected data and enables efficient management of the network topology. Localization strives to establish a coordinate system, which can be categorized as local or global. A local coordinate system reflects the position of nodes relative to one another. Such relative positioning could be realized through acoustic signals and may suffice for topology management. However, for correlating data, a global coordinate system would be needed, for which the underwater node location should be based on a terrestrial positioning system such as a GPS. Due to the major absorption loss of the higher frequency radio signals, it is not possible for an underwater node to rely on GPS receivers to infer its position. Global localization is possible by using a floating surface node or gateway which contains both radio and acoustic transceiver. Such a surface node or gateway receives the GPS coordinates from the satellite and then transmits them to underwater nodes over acoustic links. The transmission of GPS coordinates using acoustic signals can be divided in two categories based on the underwater node distance from the water surface: short-range and long-range localization.
Although the focus of this paper is on cross-medium communication using optoacoustic effect, a brief overview of underwater localization techniques is provided for completeness. Short-range underwater localization has been extensively studied and can be categorized into two main parts, namely, range-based and range-free localization [10]. In a range-based localization, underwater nodes need to leverage a ranging technique to obtain a relative location to several reference nodes. When global coordinates are required, surface buoys that can obtain their location using GPS signals are used to aid underwater nodes to localize themselves. Angle of Arrival (AoA), Received Signal Strength Indicator (RSSI), and Time of Arrival (TOA) and Time Difference of Arrival (TDoA) are the most-commonly used ranging techniques [10][11][12][13]. On the other hand, range-free localization techniques leverage the network topology and a beacon signal transmitted by a reference node to infer the locations of unknown underwater nodes [14]. However, range-based schemes usually perform better than range-free localization techniques [15], and hence most recent investigations target the range-based schemes. On the other hand, long-range underwater localization is often more challenging since underwater acoustic waves travel in an inhomogeneous environment with varying speeds. The varying speed of propagating acoustic signals results in different propagation behavior from the case of free space. Thus, modeling the acoustic communication channel in underwater configuration has been the target of multiple studies where the effect of Sound Speed Profile (SSP) onto the propagating acoustic signal is addressed [16][17][18][19][20][21]. In general, factoring in the SSP variability in underwater environments yields better estimates of acoustic propagation paths and eventually improves localization accuracy [22]. Moreover, a recent work is targeting to localize a swarm of underwater autonomous vehicles [23].
All the methods mentioned above require a floating surface node or gateway which constitutes a significant shortcoming. The deployment of such floating gateways is logistically complicated and constitutes security risk for the underwater networks. Several studies have been made to localize underwater nodes with the absence of a surface node where some means of communications are used to cross the air–water barrier. To cross the air–water barrier, a proposed technique relies on the use of Visual Light Communication (VLC) to transmit information from an off-water node to the underwater nodes [24][25]. Moreover, preliminary investigation has been made on how to use the VLC to localize underwater nodes using RSSI [26]. In the proposed scheme, the airborne node transmits its GPS location using the VLC communication towards the water surface where the underwater nodes reside. The underwater node then detects the VLC and determines its location based on the intensity of the received light signal. By factoring the loss encountered by the visual light through its path, the authors propose a localization scheme where the underwater node can know its relative location from the transmitter. Magnetic Induction (MI) is also used to overcome the challenges faced in the air–water interface. Several studies have been made on the use of MI to communicate in underwater environments [27][28].
Neither VLC nor MI can reach a longer distance in the underwater environment. Utilizing the PA effect to establish long distance cross-medium communication is deemed to be a more efficient method for underwater node localization. Particularly, an airborne unit generates virtual surface anchors to localize underwater networks. Leveraging a laser source, the airborne unit chooses a point on the water surface where a high energy pulsed laser is directed. Upon striking the water surface, the energy in the laser is absorbed by the water and acoustic signals are generated in underwater environments through the PA effect. By employing a suitable PA modulation methodology to transmit the GPS position of the airborne unit, Mahmud et al. [29] have devised a localization scheme that handles various configurations. Specifically, the airborne unit generates multiple virtual anchors that are non-collinearly positioned to localize underwater nodes. The authors also explore the ability to localize a mobile under node using a single airborne unit where multiple readings can be obtained by moving the underwater node from the range of one virtual anchor to another. Generally, research on PA-enabled underwater localization is in early stages and more progress is expected in the next few years.
References
- Blackmon, F.; Antonelli, L. Experimental demonstration of multiple pulse nonlinear optoacoustic signal generation and Control. Appl. Opt. 2005, 44, 103.
- Blackmon, F.; Antonelli, L. Remote, Aerial, Trans-Layer, Linear and Non-Linear Downlink Underwater Acoustic Communication. In Proceedings of the OCEANS 2006 Conference, Boston, MA, USA, 18–21 September 2006; pp. 1–7.
- Brelet, Y.; Jarnac, A.; Carbonnel, J.; André, Y.-B.; Mysyrowicz, A.; Houard, A.; Fattaccioli, D.; Guillermin, R.; Sessarego, J.-P. Underwater acoustic signals induced by intense ultrashort laser pulse. J. Acoust. Soc. Am. 2015, 137, EL288–EL292.
- Blackmon, F.; Estes, L.; Fain, G. Linear opto-acoustic underwater communication. Appl. Opt. 2005, 44, 3833–3845.
- Ji, Z.; Fu, Y.; Li, J.; Zhao, Z.; Mai, W. Photoacoustic Communication from the Air to Underwater Based on Low-Cost Passive Relays. IEEE Commun. Mag. 2021, 59, 140–143.
- Krasovitski, B.; Kislev, H.; Kimmel, E. Modeling photothermal and acoustical induced microbubble generation and growth. Ultrasonics 2007, 47, 90–101.
- Available online: https://www.optotune.com/focus-tunable-lenses (accessed on 29 April 2022).
- Jiang, H.; Qiu, H.; He, N.; Liao, X. Research on the optoacoustic communication system for speech transmission by variable laser-pulse repetition rates. Results Phys. 2018, 9, 1291–1296.
- Jones, T.G.; Ting, A.; Sprangle, P.; Bibee, L.D.; Peñano, J. Remote Intense Laser Acoustic Source. U.S. Patent 7,260,023, 21 August 2007.
- Huang, H.; Zheng, Y.R. Node localization with AoA assistance in multi-hop underwater sensor networks. Ad Hoc Netw. 2018, 78, 32–41.
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A Review of Underwater Localization Techniques, Algorithms, and Challenges. J. Sens. 2020, 2020, 1–24.
- Nguyen, T.L.N.; Shin, Y. An efficient RSS localization for underwater wireless sensor networks. Sensors 2019, 19, 3105.
- Liu, F.; Chen, H.; Zhang, L.; Xie, L. Time-Difference-of-Arrival-Based Localization Methods of Underwater Mobile Nodes Using Multiple Surface Beacons. IEEE Access 2021, 9, 31712–31725.
- Qiao, G.; Zhao, C.; Zhou, F.; Ahmed, N. Distributed localization based on signal propagation loss for underwater sensor networks. IEEE Access 2019, 7, 112985–112995.
- Ssu, K.-F.; Ou, C.-H.; Jiau, H.C. Localization with mobile anchor points in wireless sensor networks. IEEE Trans. Veh. Technol. 2005, 54, 1187–1197.
- Dubrovinskaya, E.; Nissen, I.; Casari, P. On the accuracy of passive multipath-aided underwater range estimation. In Proceedings of the IEEE 3rd Underwater Communications and Networking Conference (UComms 2016), Lerici, Italy, 30 August–1 September 2016; pp. 1–5.
- Anaya, E.; Marquez, D.; Matos, N.; Nieves, G.; Valera, J.; Aceros, C.; Rodriguez, D. Underwater channel estimation and multiple object tracking using embedded computing. In Proceedings of the IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS 2017), Boston, MA, USA, 5–8 August 2017; pp. 188–191.
- Gul, S.; Zaidi, S.S.H.; Khan, R.; Wala, A.B. Underwater acoustic channel modeling using BELLHOP ray tracing method. In Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; pp. 665–670.
- Martins, G.R.M.S.; Cabral, J.; Lanceros-Mendez, S. Effect of the Acoustic Impedance in Ultrasonic Emitter Transducers using Digital Modulations. Ocean Eng. 2015, 100, 107–116.
- Sameer, B.T.P.; Koilpillai, R.D.; Muralikrishna, P. Underwater acoustic communications: Design considerations at the physical layer based on field trials. In Proceedings of the National Conference on Communications (NCC), Kharagpur, India, 3–5 February 2012; pp. 1–5.
- Finette, S. A stochastic representation of environmental uncertainty and its coupling to acoustic wave propagation in ocean waveguides. J. Acoust. Soc. Am. 2006, 120, 2567–2579.
- LePage, K.D. Modeling propagation and reverberation sensitivity to oceanographic and seabed variability. IEEE J. Ocean. Eng. 2006, 31, 402–412.
- Allison, M. A Resilient Cooperative Localization Strategy for Autonomous Underwater Vehicles in Swarms. In Proceedings of the 10th Annual Computing and Communication Workshop and Conference (CCWC 2020), Las Vegas, NV, USA, 6–8 January 2020; pp. 150–156.
- Islam, M.S.; Younis, M.; Ahmed, A. Communication through Air Water Interface Using Multiple Light Sources. In Proceedings of the IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018.
- Islam, M.S.; Younis, M. An Adaptive DPPM for Efficient and Robust Visible Light Communication across the Air-Water Interface. In Proceedings of the 29th Wireless and Optical Communications Conference (WOCC), Newark, NJ, USA, 1–2 May 2020.
- Saif, J.B.; Younis, M. Underwater Localization using Airborne Visible Light Communication Links. In Proceedings of the IEEE Global Communications Conference (GLOBECOM 2021), Madrid, Spain, 7–11 December 2021; pp. 1–6.
- Kisseleff, S.; Akyildiz, I.F.; Gerstacker, W.H. Survey on advances in magnetic induction-based wireless underground sensor networks. IEEE Internet Things J. 2018, 5, 4843–4856.
- Li, Y.; Wang, S.; Jin, C.; Zhang, Y.; Jiang, T. A survey of underwater magnetic induction communications: Fundamental issues recent advances and challenges. IEEE Commun. Surv. Tutor. 2019, 21, 2466–2487.
- Mahmud, M.; Younis, M.; Carter, G.; Choa, F. Underwater Node Localization using Optoacoustic Signals. In Proceedings of the IEEE International Conference on Communications (ICC 2022), Seoul, Korea, 16–20 May 2022.
More
Information
Subjects:
Engineering, Electrical & Electronic
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.4K
Revisions:
2 times
(View History)
Update Date:
20 Jun 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No