Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Amol Yerudkar | -- | 2576 | 2022-03-31 11:41:19 | | | |
| 2 | Amina Yu | -12 word(s) | 2564 | 2022-04-01 02:39:52 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Yerudkar, A.; Singh, A.; Mariani, V.; Iannelli, L.; Glielmo, L. Unmanned Aerial Vehicles in Precision Agriculture Sensing Applications. Encyclopedia. Available online: https://encyclopedia.pub/entry/21215 (accessed on 24 June 2026).
Yerudkar A, Singh A, Mariani V, Iannelli L, Glielmo L. Unmanned Aerial Vehicles in Precision Agriculture Sensing Applications. Encyclopedia. Available at: https://encyclopedia.pub/entry/21215. Accessed June 24, 2026.
Yerudkar, Amol, Abhaya Singh, Valerio Mariani, Luigi Iannelli, Luigi Glielmo. "Unmanned Aerial Vehicles in Precision Agriculture Sensing Applications" Encyclopedia, https://encyclopedia.pub/entry/21215 (accessed June 24, 2026).
Yerudkar, A., Singh, A., Mariani, V., Iannelli, L., & Glielmo, L. (2022, March 31). Unmanned Aerial Vehicles in Precision Agriculture Sensing Applications. In Encyclopedia. https://encyclopedia.pub/entry/21215
Yerudkar, Amol, et al. "Unmanned Aerial Vehicles in Precision Agriculture Sensing Applications." Encyclopedia. Web. 31 March, 2022.
Copy Citation
Precision agriculture (PA) is becoming highly significant in today’s technologically advanced world and has been considered as the farm for the future. This is a modern farming management concept using digital techniques to monitor and optimize agricultural production processes by using technological advancement. PA uses modern technology and principles to manage the spatial and temporal variability in all aspects of agricultural production for the goal of improving crop performance.
drones
precision agriculture
precision viticulture
unmanned aerial vehicles (UAVs)
remote sensing
1. Introduction
Spatial and temporal variability are terms used to describe variability that have significant impacts on agricultural production. Examples of spatial and temporal variability include yield variability [1], field variability [2], soil variability [3], crop variability [4], and management variability [5]. The goal is to reduce economical costs, decrease the impact on the environment (for example, by using less water and fertilizers), and increase food production quality at the same time [6]. Typically, unmanned aerial vehicles (UAVs), sensor technologies, satellite navigation, and positioning technologies, and the internet of things (IoT) are used to achieve these goals. PA is increasingly aiding farmers with their job as it makes its way into fields across Europe [7]. Larger yields need greater financial investment because a large amount of fertilizers, pesticides, water, and other resources is required. However, by their proper management, growers can achieve considerable savings on the expected expenses [8][9][10]. Further, in addition to increasing the yield by proper monitoring, the plants’ health and productivity can also increase at the same time, which will allow growers to meet the demand. Figure 1 depicts the last ten years of documents released by scientists, researchers, and growers, demonstrating that the practice of PA is expanding day by day. PA has evolved on a digital-based farming management approach that monitors and optimizes agricultural production operations [11]. PA has been now practiced frequently in cultivation, monitoring and harvesting of: rice [12], wheat [13], maize [14], barley [15], soybean [16], potato [17], orange [18], olive [19], and many other crops.
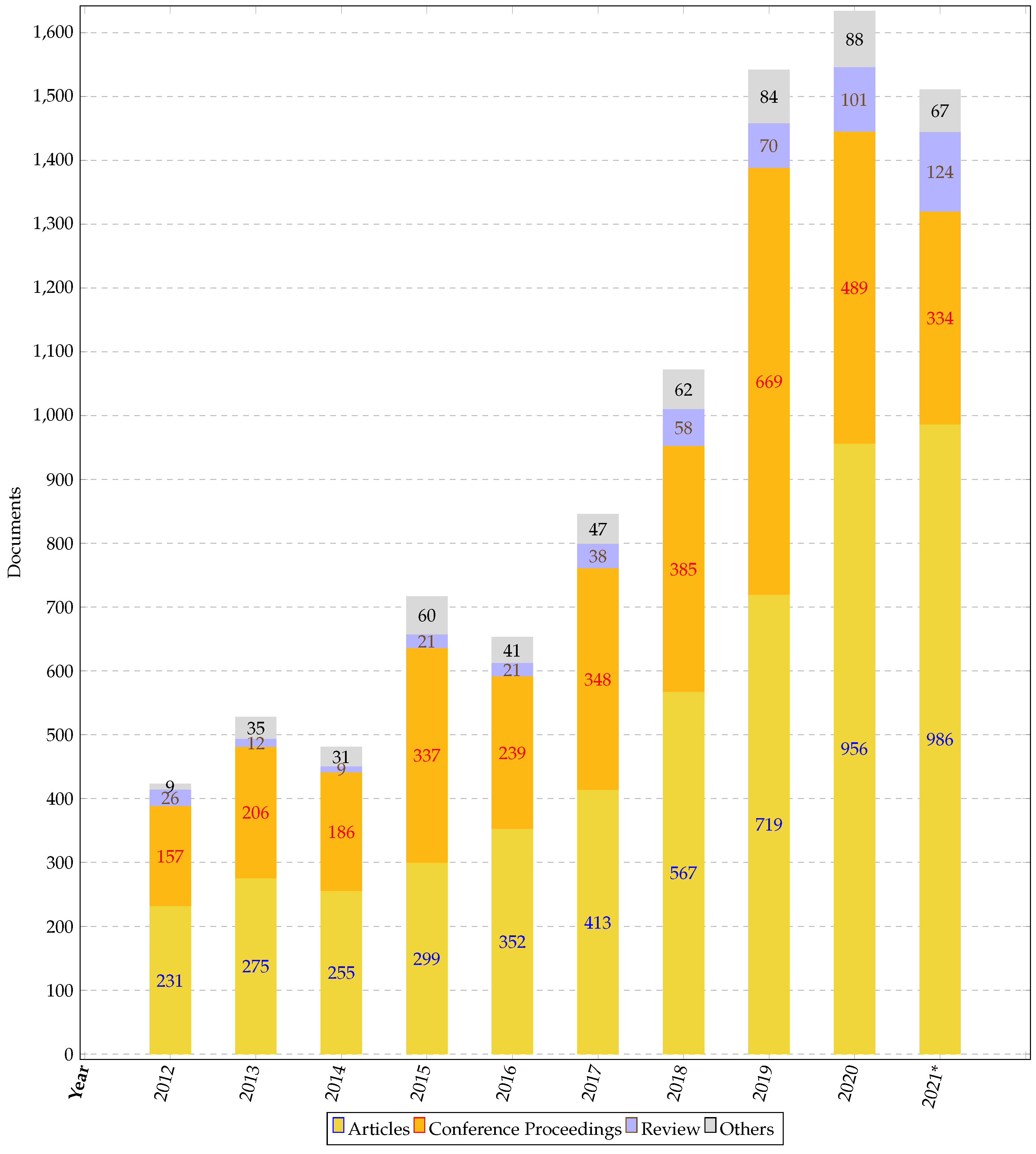
Figure 1. Documents published in precision agriculture in the last 10 years (* prior to 15 November 2021).
Precision viticulture (PV) is a subset of PA, where the same technologies are applied only on grapevine care and development. In viticulture, the cultivation of grapes are of concern, and it refers to a set of activities in the vineyard [20]. Typically, viticulturists are mainly interested in monitoring and managing the vineyard [21], fertilizing, and watering [22], canopy management [23], monitoring fruit growth and characteristics [24], choosing when to harvest [25], and trimming during the specific months [26]. Viticulturists and winemakers are commonly linked because vineyard management and grape characteristics provide the basis for wine-making [27]. A vast range of varietals is presently cultivated in the European Union as actual grapes for wine growing and viticulture [28].
Viticulture is one of the major factors which plays an important role in the economic developments of majorly the European countries [29]. PV also involves the practice of grape farmers and winemakers employing a range of information technologies to better sense and comprehend variability in their production systems. Then, this information is used to better match production inputs to desired or expected outputs [30]. Crop sensors and yield monitors, remote sensors, geographic information systems (GIS), and global navigation satellite systems (GNSS) are some of the components of PV’s technological advancements. Therefore, they are a rising trend in the swine industry [31]. Furthermore, PV is growing substantially because of the improved and cost-effective sensors, methodologies, and equipment for data acquisition from drones [32].
2. Why UAV in PA?
It is convincing that as the world’s population grows, there is a need to enhance what is done on the farm, and UAVs are a reasonable extension of improving productivity and quality of the crops that will be cultivated [33]. The UAVs should hover over the field and detect areas that have a significant infestation that cannot be seen from a distant location, allowing a range of pesticides to be applied exclusively to smaller regions where the infections are present [34]. The objective of these efforts is to achieve productivity gains of  70%by 2050 to satisfy the growing requirements of the Earth’s population while decreasing the area under agriculture [35]. UAVs fall under the category of aerial robotics, which is the deployment of devices to perform beneficial tasks, including agriculture which is the focus. The designed UAV system should have the required payload capacity [36] and can fly to survey the area being monitored [37]. In addition (but not limited to), the system may include near-infrared, visible cameras aboard, the potential to use thermal cameras [38], and multispectral and hyperspectral cameras.
70%by 2050 to satisfy the growing requirements of the Earth’s population while decreasing the area under agriculture [35]. UAVs fall under the category of aerial robotics, which is the deployment of devices to perform beneficial tasks, including agriculture which is the focus. The designed UAV system should have the required payload capacity [36] and can fly to survey the area being monitored [37]. In addition (but not limited to), the system may include near-infrared, visible cameras aboard, the potential to use thermal cameras [38], and multispectral and hyperspectral cameras.
70%by 2050 to satisfy the growing requirements of the Earth’s population while decreasing the area under agriculture [35]. UAVs fall under the category of aerial robotics, which is the deployment of devices to perform beneficial tasks, including agriculture which is the focus. The designed UAV system should have the required payload capacity [36] and can fly to survey the area being monitored [37]. In addition (but not limited to), the system may include near-infrared, visible cameras aboard, the potential to use thermal cameras [38], and multispectral and hyperspectral cameras.Technologies of UAV in PA
UAVs have recently been employed in agriculture for large-scale inspections as well as irrigation [39] and fertilization [40]. A drone’s payload is made up of all the sensors and actuators attached to it, i.e., (i) multispectral and hyperspectral cameras, (ii) infrared cameras and RGB cameras, (iii) light detection and ranging (LiDAR) systems [41], and global navigation satellite system (GNSS). More research into the integration of multi-sensors on a UAV platform, such as RGB cameras, LiDAR, thermal cameras, and multi/hyperspectral cameras, is needed to improve PA estimate accuracy [42]. The necessity for a thermal camera aboard a UAV can be reduced by using the technique outlined in [43]. Due to the restricted area available for picture collection, UAV photos seldom catch well-watered plants or arid areas. The thermal camera is not required in an approach such as the one described in [43], which focuses on certain mapping using just multispectral pictures, which might considerably decrease operating and investment expenses. A good quality image can be achieved utilizing the suggested methods and control approaches of [44]. It was also showed that the suggested methods can handle various image datasets, such as those acquired by frame cameras with variable sensor-to-object distances over some crop fields.
When evapotranspiration is involved, it is sometimes apparent to utilize thermal cameras. The current conventional technique for aligning thermal imaging employs GPS logger data for the initial imagery spot; however, it does not account for changes in meteorological conditions during the flight, leading to unsatisfactory outcomes. To improve this scenario, three alignment and calibration techniques based on RGB image alignment were developed in [45]. According to the findings of [46], the suggested thermal calibration technique based on temperature-controlled standards can provide appropriate precision and accuracy for UAV-based canopy temperature estimates applied to PA.
3. Why UAV in PV?
The key to success for any PV strongly depends on the collection of the maximum amount of geo-referenced information of the whole vineyard and the technologies used to monitor. Since the late twentieth century, UAVs have advanced quickly. UAV remote sensing has been swiftly put into reality as agricultural remote sensing has improved. Vegetation coverage monitoring, growth tracking, and yield estimates are among the most common types of field growth data collected using UAV platforms [47]. In addition, UAVs have partially solved terrestrial and high-altitude remote sensing shortcomings, offering substantial support for PA crop information monitoring technologies [48].
3.1. Technologies of UAV in PV
The initial phase in the wine-making process is viticulture. The circumstances of the vineyard and human decisions in the vineyard determine the quality of wine [49]. The human decision for PV is based on the data received from the UAV sensors and attached tools [50]. The location of the vineyard influences the flavor of the grapes grown. The majority of PV research is focused on vegetation index information [51]. The vegetation index data may be gathered using multispectral cameras placed on the UAVs [52]. Changes in items that affect our environments, such as water quality and plant cover, are measured using these cameras. It is now feasible to build maps of vegetation coverage for the whole region under examination using these cameras on UAVs. Using remotely sensed data, the NDVI has been utilized to reveal discrepancies in grapevine performance. The NDVI is calculated using the formula
where 
and 
are the reflectance levels in the near-infrared and in the red spectrum, respectively [53]. In numerous investigations, NDVI readings in vineyards have been related to leaf area index (LAI). The relationship between NDVI and vineyard LAI is well known because NDVI is strongly linked to the gross quantity of chlorophyll. Increasing leaf area leads to a higher gross quantity of chlorophyll per unit area of the vineyard. LAI is a major physiological component for characterizing crop growth models and vegetation indices for expressing crop growth status. The NDVI does not have a linear connection with LAI. Using UAV platforms, many studies on spectral data monitoring growth indicators such as LAI [54][55] have been conducted. Authors in [56] describe three models that use a quad-rotor UAV platform with a digital camera to examine the link between LAI and canopy coverage. A UAV fitted with hyperspectral cameras was deployed to evaluate different cultivars to illustrate the feasibility of LAI monitoring in the context of PA [57]. Various methods of calculating vegetation indices have been used throughout history; however, the most often researched vegetation indices are given in [58].
Multispectral cameras collect data from the electromagnetic spectrum across different bands, or frequency intervals [59]. In particular, they are used for the NIR spectrum, specifically in the range 800–850 nm, since this band is important for determining the health of plants [60]. In the NIR spectrum, plants emit up to 60%
of their total electromagnetic radiated energy [61]. For measuring vegetation on the ground, differences in reflected light in the NIR part of the spectrum are critical. Multispectral remote sensing datasets are used to detect light energy reflected from objects on the earth’s surface and estimate various physical and chemical characteristics of things that are not visible to the naked eye. Following that, the measurements provide us with information about what is on the ground. For example, vegetation is typically indicated by pixels with a spectrum containing much NIR light energy.
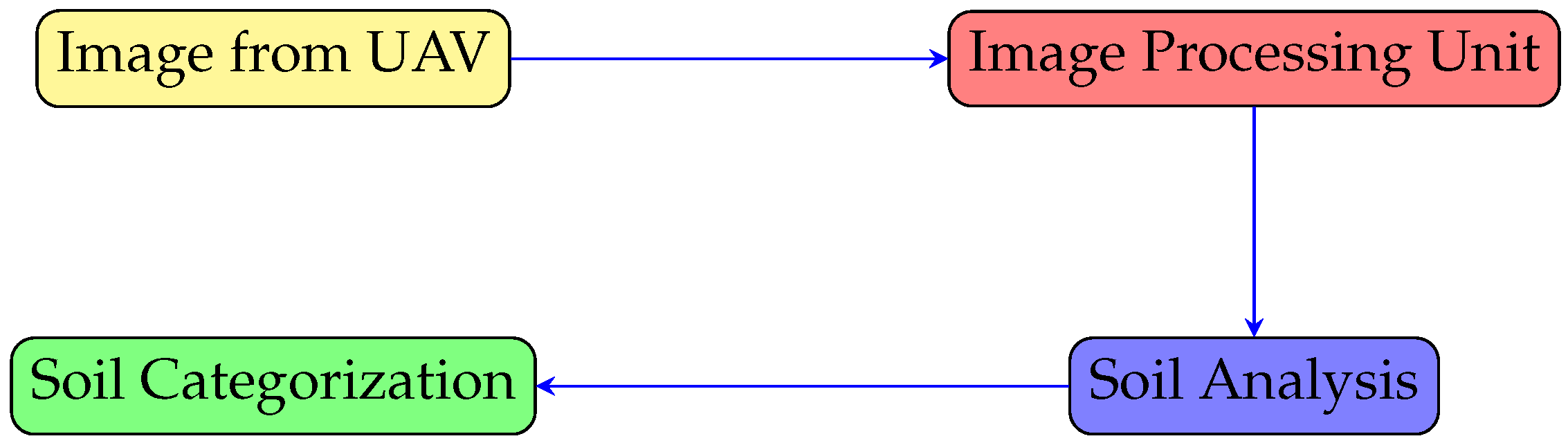
The growers start with the grape variety, and once that is achieved, understanding the soil for them becomes important. Figure 2 shows a block diagram of the decision making process for the categorization of the soil (mainly the field of plots on which the grapevine is cultivated). The acquisition of aerial photographs takes place in the first block. The photographs are used in the second block to create a mosaicked image of the site under consideration [62]. This mosaicked image is also used to analyze the relationship between various surface soil properties, such as organic matter, moisture, clay, silt, sand, and other soil content, and then, the soil is categorized accordingly. When the vegetation indices value were utilized as input data in trained techniques, the best performance in the categorization of vineyard soil RGB pictures was obtained, with overall accuracy values around 0.98 and high sensitivity values for the soil [63]. To monitor farmland soil parameters and crop growth, the UAV’s remote sensing has been equipped with high-resolution hyperspectral sensors [64].
Figure 2. Decision on soil categorization.
The use of UAVs equipped with RGB cameras has some limitations; indeed, during the first tillage process when the fields are usually covered in vegetation and/or crop leftovers, soil images cannot be shot. In addition, sometimes it is challenging to take photographs in uneven terrain that affects grape production. Elevation, latitude, slope, and aspect are among the geographical elements that influence grape production [65]. For instance, in many of the world’s best wine areas, nearby water and mountains have a strong impact [66] as also temperature, sunshine, and wind [32]. Degree days are used to quantify the amount of heat that accumulates over the course of the growing season [67]. The amount of heat necessary for grapes to reach maturity varies depending on the grape type.
Photosynthesis and taste development require sunlight [68]. However, too much exposure to sunlight might result in sunburn and shriveling of grapes. So, when planning a vineyard, row orientation and sunshine are critical considerations. It is required to make sure the afternoon sun is shining on the non-exposed section of the fruit [69]. In [70], a technique for evaluating heat and radiative stress impacts in terms of temperature at the cluster and canopy level is suggested. A high-resolution thermal monitoring method is described, which uses a UAV and a wireless sensor network (WSN) to integrate remote and proximal sensing.
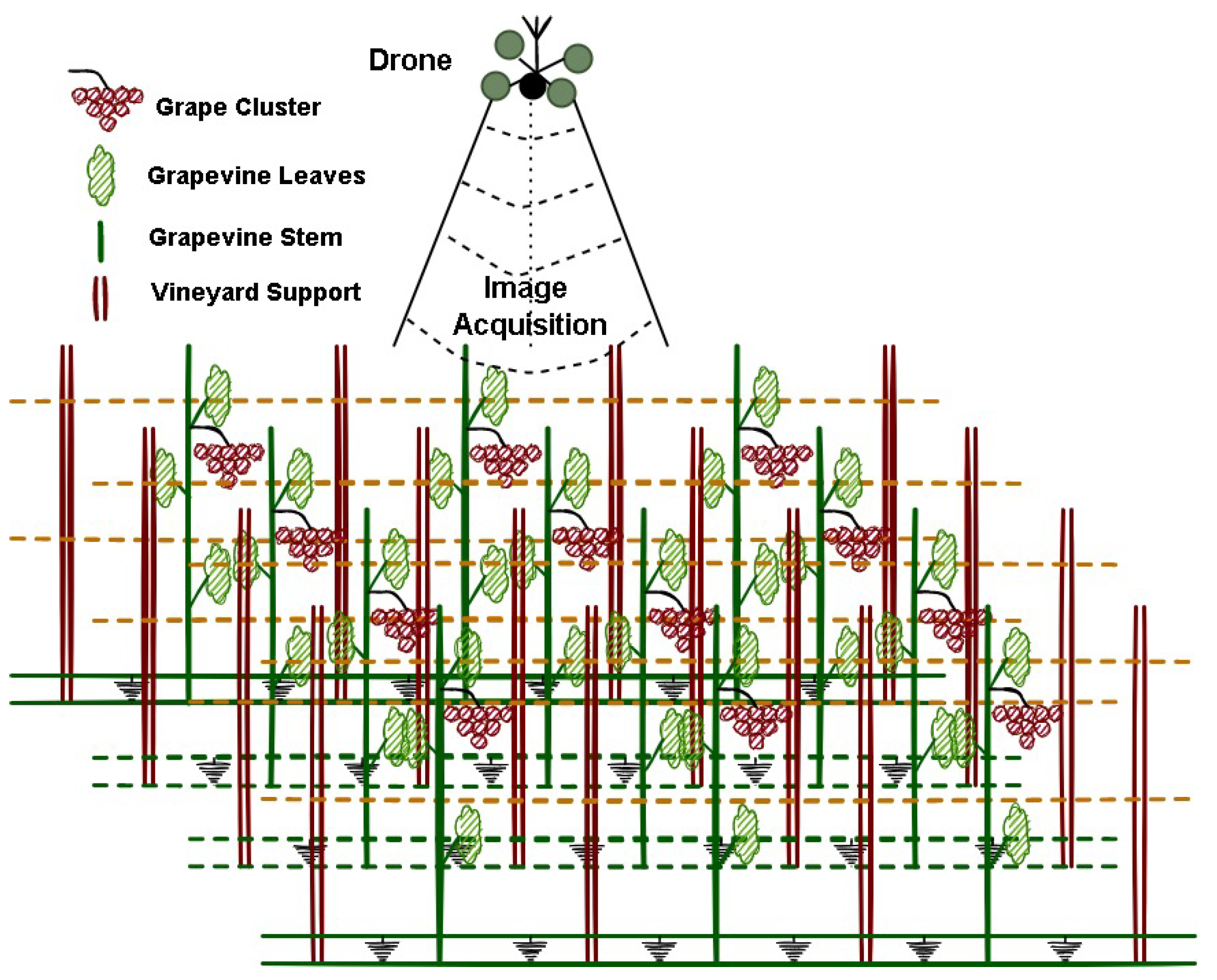
Irrigation is required frequently in the summer due to dry weather or a lack of water-holding capacity while, on the other hand, it is a common practice to give a vine as little water as possible once it has reached full maturity [71]. In this regards, the amount of water stress is crucial in order to decide when the irrigation should start, as well as its duration. Furthermore, UAV-endowed image acquisition equipment can be fruitfully exploited for the inspection of the targeted area, as sketched in Figure 3. For example, in [72], a model utilizing UAVs is developed to evaluate on a plant-by-plant basis stress sectors within the vineyard for optimal irrigation management and to detect geographic variability within the vineyards.
Figure 3. A schematic of inspection from the drone.
The quantity of water accessible to the vine and the nutrients it requires are determined by the soil type [73]. The macronutrients that was required are mostly nitrogen, phosphorus, and potassium [74]. From vineyard architecture to clonal and rootstock selection, viticultural decisions are made to suit the specific characteristics of each location [75]. For example, because grapevines are sensitive to phylloxera, a soil parasite, the resistant rootstock is frequently utilized to protect the vine [76].
Growers must consider vine density, row spacing, and direction while creating a new vineyard so that distant sensing would be simple [77]. Canopy management is one of the important measures to take by the growers. It requires continuous inspection throughout the year. However, these operations are time-consuming and difficult for the entire vineyard. The use of photogrammetric methods has shown to be effective [23]. Increased airflow and sunshine in the fruiting zone and lower disease pressure may be achieved by canopy management [78]. By maintaining the vineyard floor, farmers may impact soil fertility and water availability [79]. Cover crops are mowed to limit competition or used to reduce surplus soil moisture. Plants that affect the growth of the vine are removed by tilling nitrogen-rich cover crops into the soil [80]. In [26], a novel approach for assessing vineyard trimming is suggested, wherein UAV technology is used to produce photogrammetric point clouds, which are then analyzed using object-based image analysis algorithms.
The biggest obstacle for viticulturists is the weather, also because they have no control over it. In a particular year, hail, spring frost, drought, extreme heat, and rain can lower yields or degrade fruit quality. Pests and diseases also pose a danger to the vineyard’s long-term viability. Powdery mildew is the most prevalent illness in most cases. In [81], the authors propose a spatial-spectral segmentation technique for analyzing hyperspectral imaging data obtained from UAVs and applying it to predicting powdery mildew infection levels in undamaged grape bunches before veraison. Beginning with bud break, farmers must be proactive in planning for and responding to this situation. Grapes are filled with sugar as they get closer to ripeness, and when the fruit ripens, the sugar will leak through the skin, providing a valuable food supply for the naturally existing fungus in the vines. When this happens, it gets a disease called Botrytis bunch rot [82]. Grapevine viruses such as leafroll and bacterial infections like Pierce’s are spread by insects and require special care [83]. It is required to employ integrated pest management to identify the appropriate treatment approach. Control measures include anything from cultural techniques to canopy management, vineyard floor operations, and perhaps, pesticides.
As a result, growers must now address the problem of sustainability and consider using an alternate strategy that incorporates UAVs to save time.
References
- Yang, C.; Everitt, J.H.; Du, Q.; Luo, B.; Chanussot, J. Using high-resolution airborne and satellite imagery to assess crop growth and yield variability for precision agriculture. Proc. IEEE 2012, 101, 582–592.
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164.
- Huuskonen, J.; Oksanen, T. Soil sampling with drones and augmented reality in precision agriculture. Comput. Electron. Agric. 2018, 154, 25–35.
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agric. 2017, 139, 22–32.
- Martínez, J.; Egea, G.; Agüera, J.; Pérez-Ruiz, M. A cost-effective canopy temperature measurement system for precision agriculture: A case study on sugar beet. Precis. Agric. 2017, 18, 95–110.
- Onibonoje, M.O.; Nwulu, N. Synergistic Technologies for Precision Agriculture. In Artificial Intelligence and IoT-Based Technologies for Sustainable Farming and Smart Agriculture; IGI Global: Hershey, PA, USA, 2021; pp. 123–139.
- Lieve, W.V. Precision Agriculture and the Future of Farming in Europe; Scientific Foresight Unit (STOA): Brussels, Belgium, 2016.
- Xu, X.; Fan, L.; Li, Z.; Meng, Y.; Feng, H.; Yang, H.; Xu, B. Estimating Leaf Nitrogen Content in Corn Based on Information Fusion of Multiple-Sensor Imagery from UAV. Remote Sens. 2021, 13, 340.
- Zhou, X.; He, J.; Chen, D.; Li, J.; Jiang, C.; Ji, M.; He, M. Human-robot skills transfer interface for UAV-based precision pesticide in dynamic environments. Assem. Autom. 2021, 41, 345–357.
- Zhou, Z.; Majeed, Y.; Naranjo, G.D.; Gambacorta, E.M. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019.
- Basso, B.; Antle, J. Digital agriculture to design sustainable agricultural systems. Nat. Sustain. 2020, 3, 254–256.
- Xiao, K.; Xiao, D.; Luo, X. Smart water-saving irrigation system in precision agriculture based on wireless sensor network. Trans. Chin. Soc. Agric. Eng. 2010, 26, 170–175.
- Gómez-Candón, D.; De Castro, A.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56.
- Bonfante, A.; Monaco, E.; Manna, P.; De Mascellis, R.; Basile, A.; Buonanno, M.; Cantilena, G.; Esposito, A.; Tedeschi, A.; De Michele, C.; et al. LCIS DSS—An irrigation supporting system for water use efficiency improvement in precision agriculture: A maize case study. Agric. Syst. 2019, 176, 102646.
- Burkart, A.; Hecht, V.; Kraska, T.; Rascher, U. Phenological analysis of unmanned aerial vehicle based time series of barley imagery with high temporal resolution. Precis. Agric. 2018, 19, 134–146.
- Brown, R.M.; Dillon, C.R.; Schieffer, J.; Shockley, J.M. The carbon footprint and economic impact of precision agriculture technology on a corn and soybean farm. J. Environ. Econ. Policy 2016, 5, 335–348.
- Al-Gaadi, K.A.; Hassaballa, A.A.; Tola, E.; Kayad, A.G.; Madugundu, R.; Alblewi, B.; Assiri, F. Prediction of potato crop yield using precision agriculture techniques. PLoS ONE 2016, 11, e0162219.
- Colaço, A.F.; Molin, J.P.; Rosell-Polo, J.R. Spatial variability in commercial orange groves. Part 1: Canopy volume and height. Precis. Agric. 2019, 20, 788–804.
- Álamo, S.; Ramos, M.; Feito, F.; Cañas, A. Precision techniques for improving the management of the olive groves of southern Spain. Span. J. Agric. Res. 2012, 10, 583–595.
- Winkler, A.J. General Viticulture; University of California Press: Berkeley, CA, USA, 1974.
- Sassu, A.; Gambella, F.; Ghiani, L.; Mercenaro, L.; Caria, M.; Pazzona, A.L. Advances in Unmanned Aerial System Remote Sensing for Precision Viticulture. Sensors 2021, 21, 956.
- Spachos, P.; Gregori, S. Integration of wireless sensor networks and smart uavs for precision viticulture. IEEE Internet Comput. 2019, 23, 8–16.
- López-Granados, F.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Oneka, O.; Marín, D.; Loidi, M.; de Castro, A.I.; Santesteban, L.G. Monitoring vineyard canopy management operations using UAV-acquired photogrammetric point clouds. Remote Sens. 2020, 12, 2331.
- De Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D characterization of vineyards using a novel UAV imagery-based OBIA procedure for precision viticulture applications. Remote Sens. 2018, 10, 584.
- Di Gennaro, S.F.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 validation for spatial variability assessment in overhead trellis system viticulture versus UAV and agronomic data. Remote Sens. 2019, 11, 2573.
- Torres-Sánchez, J.; Marín, D.; De Castro, A.; Oria, I.; Jiménez-Brenes, F.; Miranda, C.; Santesteban, L.; López-Granados, F. Assessment of vineyard trimming and leaf removal using UAV photogrammetry. In Precision Agriculture’19; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; p. e0130479.
- Romboli, Y.; Di Gennaro, S.; Mangani, S.; Buscioni, G.; Matese, A.; Genesio, L.; Vincenzini, M. Vine vigour modulates bunch microclimate and affects the composition of grape and wine flavonoids: An unmanned aerial vehicle approach in a Sangiovese vineyard in Tuscany. Aust. J. Grape Wine Res. 2017, 23, 368–377.
- Mondello, V.; Larignon, P.; Armengol Fortí, J.; Kortekamp, A.; Váczy, K.; Prezman, F.; Serrano, E.; Rego, C.; Mugnai, L.; Fontaine, F. Management of grapevine trunk diseases: Knowledge transfer, current strategies and innovative strategies adopted in Europe. Phytopathol. Mediterr. 2018, 57, 369–383.
- Santos, J.A.; Fraga, H.; Malheiro, A.C.; Moutinho-Pereira, J.; Dinis, L.T.; Correia, C.; Moriondo, M.; Leolini, L.; Dibari, C.; Costafreda-Aumedes, S.; et al. A review of the potential climate change impacts and adaptation options for European viticulture. Appl. Sci. 2020, 10, 3092.
- Bramley, R.; Pearse, B.; Chamberlain, P. Being profitable precisely-a case study of precision viticulture from Margaret River. Aust. N. Z. Grapegrow. Winemak. 2003, 84–87.
- Arnó Satorra, J.; Martínez Casasnovas, J.A.; Ribes Dasi, M.; Rosell Polo, J.R. Precision viticulture. Research topics, challenges and opportunities in site-specific vineyard management. Span. J. Agric. Res. 2009, 7, 779–790.
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990.
- Das, S.; Chapman, S.; Christopher, J.; Choudhury, M.R.; Menzies, N.W.; Apan, A.; Dang, Y.P. UAV-thermal imaging: A technological breakthrough for monitoring and quantifying crop abiotic stress to help sustain productivity on sodic soils—A case review on wheat. Remote Sens. Appl. Soc. Environ. 2021, 23, 100583.
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sens. 2021, 13, 2139.
- FAO. Declaration of the World Summit on Food Security; FAO: Rome, Italy, 2009.
- Madroñal, D.; Palumbo, F.; Capotondi, A.; Marongiu, A. Unmanned Vehicles in Smart Farming: A Survey and a Glance at Future Horizons. In Proceedings of the 2021 Drone Systems Engineering and Rapid Simulation and Performance Evaluation: Methods and Tools Proceedings, 2021 ACM, Budapest, Hungary, 18–20 January 2021; pp. 1–8.
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sens. 2021, 13, 1221.
- Awais, M.; Li, W.; Cheema, M.M.; Hussain, S.; Shaheen, A.; Aslam, B.; Liu, C.; Ali, A. Assessment of optimal flying height and timing using high-resolution unmanned aerial vehicle images in precision agriculture. Int. J. Environ. Sci. Technol. 2021, 19, 1–18.
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19.
- Bacco, M.; Ferro, E.; Gotta, A. UAVs in WSNs for agricultural applications: An analysis of the two-ray radio propagation model. In Proceedings of the SENSORS, 2014 IEEE, Valencia, Spain, 2–5 November 2014; pp. 130–133.
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012022.
- Shao, G.; Han, W.; Zhang, H.; Liu, S.; Wang, Y.; Zhang, L.; Cui, X. Mapping maize crop coefficient Kc using random forest algorithm based on leaf area index and UAV-based multispectral vegetation indices. Agric. Water Manag. 2021, 252, 106906.
- Mokhtari, A.; Ahmadi, A.; Daccache, A.; Drechsler, K. Actual Evapotranspiration from UAV Images: A Multi-Sensor Data Fusion Approach. Remote Sens. 2021, 13, 2315.
- Lin, Y.C.; Zhou, T.; Wang, T.; Crawford, M.; Habib, A. New orthophoto generation strategies from UAV and ground remote sensing platforms for high-throughput phenotyping. Remote Sens. 2021, 13, 860.
- Maes, W.H.; Huete, A.R.; Steppe, K. Optimizing the processing of UAV-based thermal imagery. Remote Sens. 2017, 9, 476.
- Han, X.; Thomasson, J.A.; Swaminathan, V.; Wang, T.; Siegfried, J.; Raman, R.; Rajan, N.; Neely, H. Field-Based Calibration of Unmanned Aerial Vehicle Thermal Infrared Imagery with Temperature-Controlled References. Sensors 2020, 20, 7098.
- Wang, L.; Liu, J.; Yang, L.; Chen, Z.; Wang, X.; Ouyang, B. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring. Trans. Chin. Soc. Agric. Eng. 2013, 29, 136–145.
- Li, D.; Li, M. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513.
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensor UAV platform based on multispectral, thermal and RGB high resolution images in precision viticulture. Agriculture 2018, 8, 116.
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Spectral discrimination and reflectance properties of various vine varieties from satellite, UAV and proximate sensors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 31.
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457.
- Borgogno-Mondino, E.; Lessio, A.; Tarricone, L.; Novello, V.; de Palma, L. A comparison between multispectral aerial and satellite imagery in precision viticulture. Precis. Agric. 2018, 19, 195–217.
- Matese, A.; Di Gennaro, S.F. Beyond the traditional NDVI index as a key factor to mainstream the use of UAV in precision viticulture. Sci. Rep. 2021, 11, 1–13.
- Ata-Ul-Karim, S.T.; Zhu, Y.; Yao, X.; Cao, W. Determination of critical nitrogen dilution curve based on leaf area index in rice. Field Crop. Res. 2014, 167, 76–85.
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing Of Environment, Sydney, Australia, 10–15 April 2011; p. 4.
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42.
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259.
- Zhu, G.; Ju, W.; Chen, J.; Liu, Y. A Novel Moisture Adjusted Vegetation Index (MAVI) to reduce background reflectance and topographical effects on LAI retrieval. PLoS ONE 2014, 9, e102560.
- Samiappan, S.; Turnage, G.; Hathcock, L.; Yao, H.; Kincaid, R.; Moorhead, R.; Ashby, S. Classifying common wetland plants using hyperspectral data to identify optimal spectral bands for species mapping using a small unmanned aerial systems—A case study. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5924–5927.
- Blekos, K.; Tsakas, A.; Xouris, C.; Evdokidis, I.; Alexandropoulos, D.; Alexakos, C.; Katakis, S.; Makedonas, A.; Theoharatos, C.; Lalos, A. Analysis, Modeling and Multi-Spectral Sensing for the Predictive Management of Verticillium Wilt in Olive Groves. J. Sens. Actuator Netw. 2021, 10, 15.
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data. Sensors 2018, 18, 260.
- Iizuka, K.; Itoh, M.; Shiodera, S.; Matsubara, T.; Dohar, M.; Watanabe, K. Advantages of unmanned aerial vehicle (UAV) photogrammetry for landscape analysis compared with satellite data: A case study of postmining sites in Indonesia. Cogent Geosci. 2018, 4, 1498180.
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and segmentation of vine canopy in ultra-high spatial resolution RGB imagery obtained from unmanned aerial vehicle (UAV): A case study in a commercial vineyard. Remote Sens. 2017, 9, 268.
- Wang, J.; Wang, S.; Zou, D.; Chen, H.; Zhong, R.; Li, H.; Zhou, W.; Yan, K. Social Network and Bibliometric Analysis of Unmanned Aerial Vehicle Remote Sensing Applications from 2010 to 2021. Remote Sens. 2021, 13, 2912.
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Bessa, J.; Sousa, A.; Peres, E.; Morais, R.; Sousa, J.J. Vineyard properties extraction combining UAS-based RGB imagery with elevation data. Int. J. Remote Sens. 2018, 39, 5377–5401.
- Zoto, J.; Musci, M.A.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic path planning for unmanned ground vehicle using uav imagery. In International Conference on Robotics in Alpe-Adria Danube Region; Springer: Cham, Switzerland, 2019; pp. 223–230.
- Cogato, A.; Pagay, V.; Marinello, F.; Meggio, F.; Grace, P.; De Antoni Migliorati, M. Assessing the feasibility of using sentinel-2 imagery to quantify the impact of heatwaves on irrigated vineyards. Remote Sens. 2019, 11, 2869.
- Kopačková-Strnadová, V.; Koucká, L.; Jelének, J.; Lhotáková, Z.; Oulehle, F. Canopy top, height and photosynthetic pigment estimation using Parrot Sequoia multispectral imagery and the Unmanned Aerial Vehicle (UAV). Remote Sens. 2021, 13, 705.
- Costa, J.; Egipto, R.; Sánchez-Virosta, A.; Lopes, C.; Chaves, M. Canopy and soil thermal patterns to support water and heat stress management in vineyards. Agric. Water Manag. 2019, 216, 484–496.
- Di Gennaro, S.F.; Matese, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high-resolution unmanned aerial vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87.
- Soubry, I.; Patias, P.; Tsioukas, V. Monitoring Vineyards with UAV and Multi-sensors for the assessment of Water Stress and Grape Maturity. J. Unmanned Veh. Syst. 2017, 5, 37–50.
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput. Electron. Agric. 2018, 147, 109–117.
- Poblete, T.; Ortega-Farías, S.; Moreno, M.A.; Bardeen, M. Artificial neural network to predict vine water status spatial variability using multispectral information obtained from an unmanned aerial vehicle (UAV). Sensors 2017, 17, 2488.
- Salam, A. Internet of things in agricultural innovation and security. In Internet of Things for Sustainable Community Development; Springer: Cham, Switzerland, 2020; pp. 71–112.
- Puig Sirera, À.; Antichi, D.; Warren Raffa, D.; Rallo, G. Application of Remote Sensing Techniques to Discriminate the Effect of Different Soil Management Treatments over Rainfed Vineyards in Chianti Terroir. Remote Sens. 2021, 13, 716.
- Reynolds, A. The grapevine, viticulture, and winemaking: A brief introduction. In Grapevine Viruses: Molecular Biology, Diagnostics and Management; Springer: Cham, Switzerland, 2017; pp. 3–29.
- Weiss, M.; Baret, F. Using 3D point clouds derived from UAV RGB imagery to describe vineyard 3D macro-structure. Remote Sens. 2017, 9, 111.
- Volschenk, C.; Hunter, J. Effect of seasonal canopy management on the performance of Chenin blanc/99 Richter grapevines. S. Afr. J. Enol. Vitic. 2001, 22, 36–40.
- Vance, A.J.; Reeve, A.L.; Skinkis, P. The role of canopy management in vine balance. In Corvallis, or Extension Service; Oregon State University: Corvallis, OR, USA, 2013.
- Cruz, A.; Botelho, M.; Silvestre, J.; Castro, R. Soil management: Introduction of tillage in a vineyard with a long-term natural cover. Ciênc. Téc. Vitiviníc. 2012, 27, 27–38.
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P.; Kakarla, S.C. Detecting powdery mildew disease in squash at different stages using UAV-based hyperspectral imaging and artificial intelligence. Biosyst. Eng. 2020, 197, 135–148.
- Mirás-Avalos, J.M.; Araujo, E.S. Optimization of Vineyard Water Management: Challenges, Strategies, and Perspectives. Water 2021, 13, 746.
- Páscoa, R.N. In situ visible and near-infrared spectroscopy applied to vineyards as a tool for precision viticulture. In Comprehensive Analytical Chemistry; Elsevier: Amsterdam, The Netherlands, 2018; Volume 80, pp. 253–279.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.5K
Revisions:
2 times
(View History)
Update Date:
01 Apr 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No