Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | El-Hassane AGLZIM | + 1578 word(s) | 1578 | 2022-02-23 09:51:50 | | | |
| 2 | Vicky Zhou | + 352 word(s) | 1930 | 2022-02-24 02:29:10 | | | | |
| 3 | Vicky Zhou | Meta information modification | 1930 | 2022-02-25 07:59:45 | | | | |
| 4 | Vicky Zhou | -2 word(s) | 1928 | 2022-02-25 13:18:04 | | | | |
| 5 | Vicky Zhou | Meta information modification | 1928 | 2022-02-28 09:12:08 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Aglzim, E. Safe Control of Autonomous Vehicles. Encyclopedia. Available online: https://encyclopedia.pub/entry/19825 (accessed on 24 June 2026).
Aglzim E. Safe Control of Autonomous Vehicles. Encyclopedia. Available at: https://encyclopedia.pub/entry/19825. Accessed June 24, 2026.
Aglzim, El-Hassane. "Safe Control of Autonomous Vehicles" Encyclopedia, https://encyclopedia.pub/entry/19825 (accessed June 24, 2026).
Aglzim, E. (2022, February 23). Safe Control of Autonomous Vehicles. In Encyclopedia. https://encyclopedia.pub/entry/19825
Aglzim, El-Hassane. "Safe Control of Autonomous Vehicles." Encyclopedia. Web. 23 February, 2022.
Copy Citation
Mobile robot path planning has passed through multiple phases of development and took up several challenges. With the new technology in hands, it becomes less complicated to conduct path planning for mobile robots (including autonomous vehicles) and avoid both static and dynamic obstacles, so that collision-free navigation is ensured.
mobile robots
path planning
optimal control
navigation systems
1. Introduction
Over the last three decades, the autonomous and electric vehicle, also known as automated vehicle [1], has been the topic of unprecedented excitement. It is seen as the future of motorized mobility, both in terms of ecology, by tightening emission standards, reducing CO2 and pollutant emissions and environmental impacts, and in terms of safety, including improved road safety [2], where main cause of accidents and crashes are due to human errors. This solution will be accompanied by intelligent assistance to warn the driver or decide and/or anticipate avoiding a collision with static or dynamic objects, vehicles, or pedestrians. Nevertheless, this assistance can have an impact on mobility when there are also non-autonomous vehicles in the same environment; this problem has two solutions, either to have an area only for this type of navigation or to develop a cooperative navigation with other road users. Analysis has been conducted on dynamic path planning and more based on how to increase the performance of these vehicles in such a difficult environment to avoid any strange and hazardous situation which the vehicle may be able to confront in real navigation. The main purpose of planning and navigation is to provide vehicles with a safe driving and collision-free path towards their destinations, accounting for vehicle dynamics, maneuvering capabilities in the presence of obstacles, and traffic rules and road boundaries.
A global reasoning of all possible paths should finally allow the finding of the best safe path according to different criteria, such as safety distance, travel time, cost, and comfort, while satisfying some dynamic constraints related to the environment. An intelligent planning system should be able to consider the nature, size, and speed of the vehicle or the robot [3].
2. Path Planning and Navigation Technique for Autonomous Vehicles
Road accidents and time wasted in traffic jams and health problems caused by local air pollution are the most challenging and complicated issues in city life. To deal with these problems and security issues, autonomous driving (self-driving) is therefore a promising alternative. To develop this solution, path planning must come first after the perception layer, as its modules are responsible for generating a reference path for the vehicle which could avoid obstacles and satisfy vehicle dynamics constraints [4][5]. The main challenge for all the already conducted works is to improve performance through the use of the proposed models which present the dynamics of the vehicle in the nearest way to real dynamics. The trajectory planning is based on generating a set of possible paths starting from the initial position toward the final position; to do this operation, it is needed first all the information about the surrounding environment that can be got from special sensors as lidar, RGB camera, radar, etc.
Knowing the position of each object existing in the environment, either local or global, the proposed method can be applied to find the desired trajectory that could be the only one or the optimal among others. Since the desired trajectory is found, the vehicle should track the planned path while avoiding 3D objects. The state-of-the-art planning offers different approaches. It can be broken down into the architecture that uses one single real-time algorithm to plan and track the trajectory, and the architecture that uses two separate algorithms where the first one is an offline planner and the second is a real-time tracker, and there are others using a divided trajectory planning and tracking but with real-time algorithms.
After all, as the implementation of some approaches for the task of path planning for autonomous vehicles was quite difficult due to many complexities, such as environmental disturbances, weather, noise and so on, the implementation of these methods using a mobile robot, which represents a vehicle well, shows the effectiveness of the proposed method. Then, herein used simulators, such as ‘Carmaker’, in order to simulate the possible real-world disturbances to ensure the performance of the method. Herein have presented several works in which the authors deal with the trajectory planning of mobile robots that can also be used for the development of autonomous vehicles.
This section intends to discuss the different methods of path planning for autonomous vehicles. Planning takes into account path decision and optimization. Mobile robot navigation needs a pre-planned path to ensure a safe trajectory, so that path planning can be decomposed in five categories, as illustrated in Figure 1; herein will discuss each method by categories in the next sub-sections.
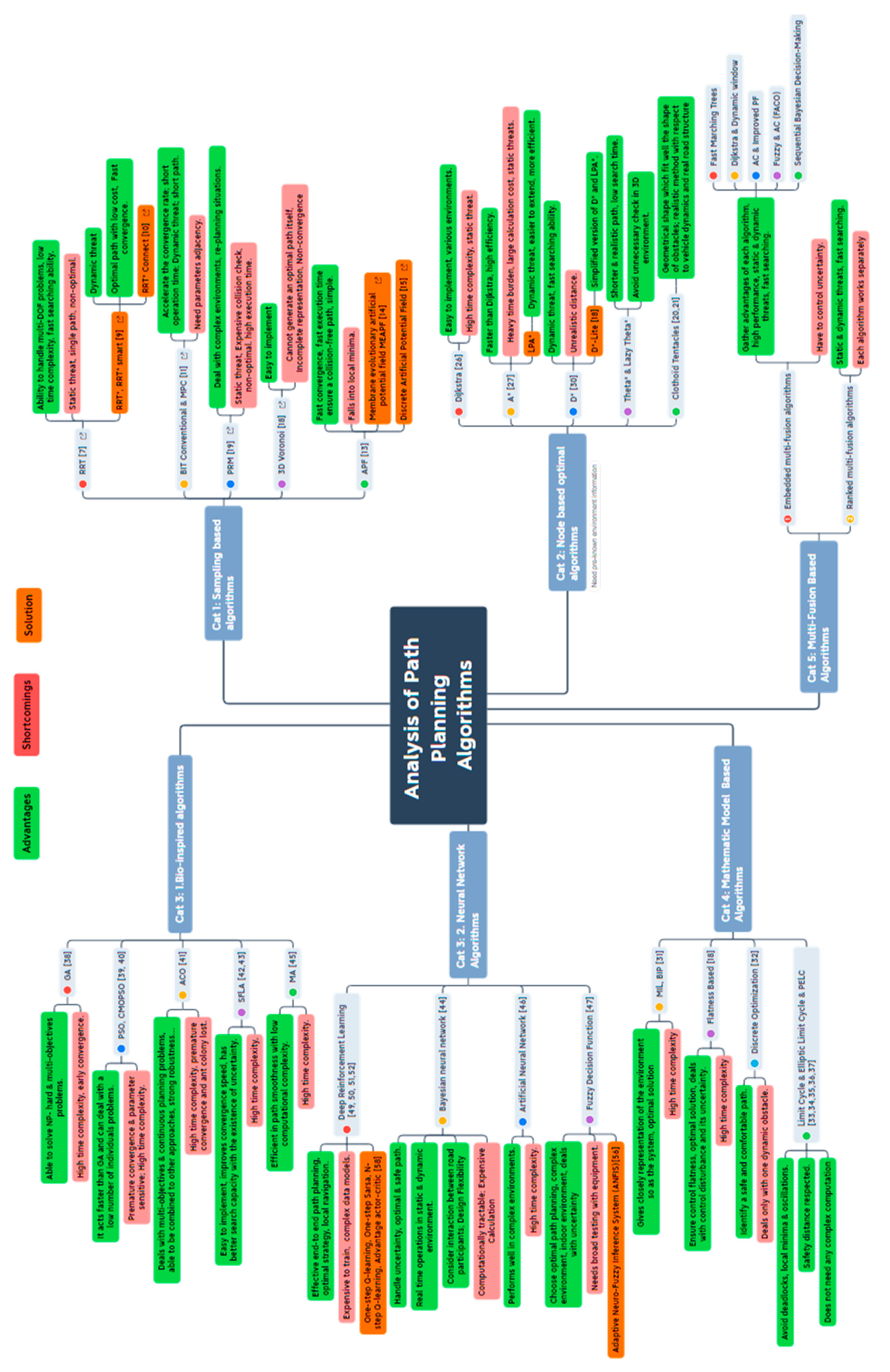 Figure 1. Scheme of path planning methods classified by five categories.
Figure 1. Scheme of path planning methods classified by five categories.2.1. Sampling-Based Algorithms
Sampling-based algorithms can be divided (Figure 2) into two parts, active and passive. Active algorithms have a processing procedure to achieve the best possible path to the objective. Rapidly exploring random tree (RRT) method is an active sampling-based algorithm proposed by LaValle. This approach is very used to solving path planning problems of different kinematic constraints and it has the ability to handle multi-DOF problems. The principle of RRT is to rapidly search the configuration space to generate the path that connects the start node and the goal node. Indoor space can be a tunnel or underground parking where the absence of the network and the performance of some sensors is poor, which can affect the input data. A analysis of an optimal path planning of a mobile robot in an unknown indoor space is presented in [6]. It implements a process by using deep learning “GoogLeNet” for obstacles classification, then applying RRT for robot path planning in order to ensure an intelligent path process while avoiding obstacles with a ray tracing technique. An algorithm grows a tree of feasible trajectories originating from the current vehicle position that attempts to reach a desired final goal position. It aims at using multi-directional rapidly exploring trees for path planning [7]. Besides, this method is implemented to deal with a degree of directional instability using the flexible multi-directional rapidly exploring trees method that built at each level a tree on demand. Then, based on the previous path exploration vertices, they use a fusion method of all trees to generate a local optimal path based on a complete and optimal path.
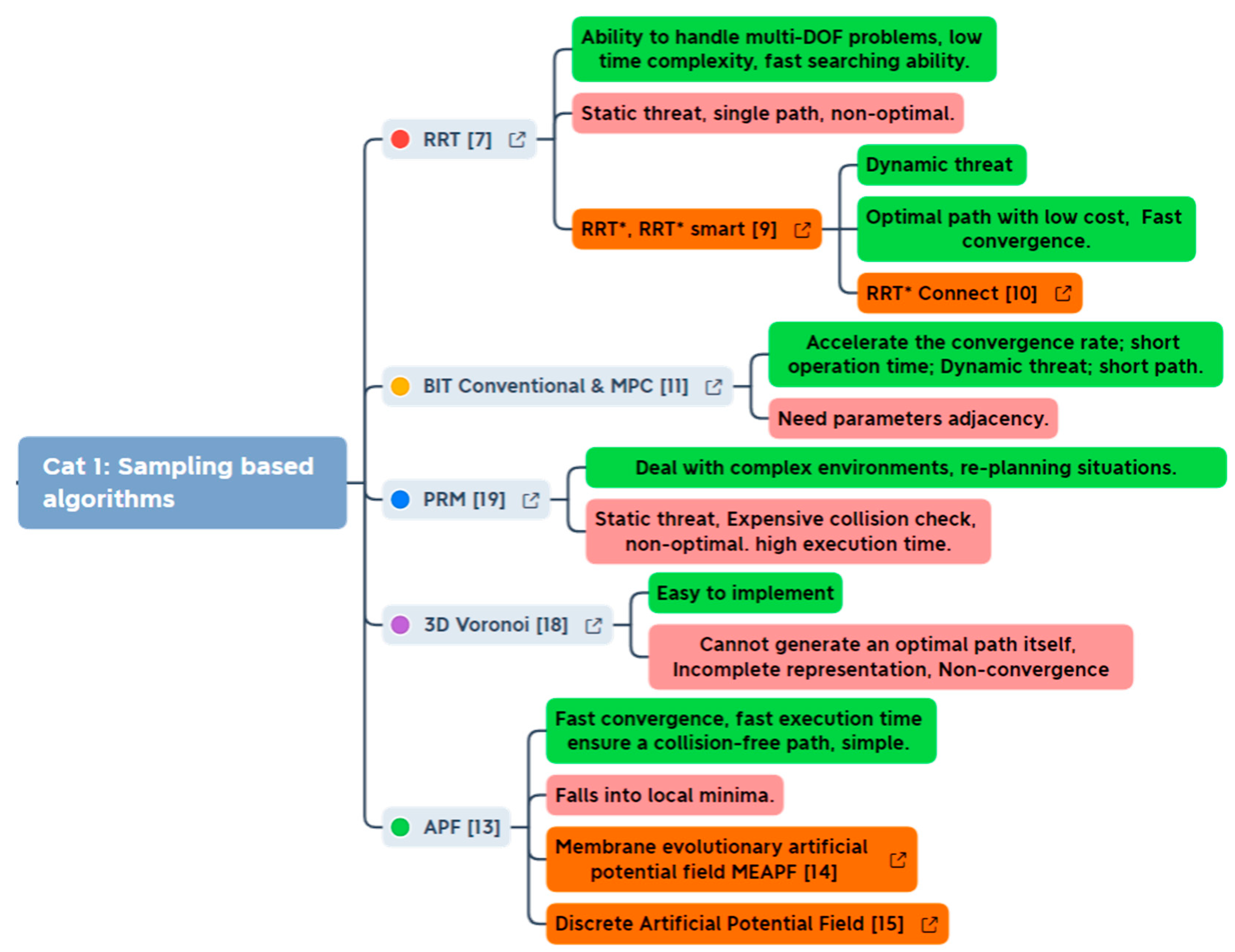 Figure 2. Sampling-based approaches with the main advantages and drawbacks.
Figure 2. Sampling-based approaches with the main advantages and drawbacks.2.2. Node-Based Optimal Algorithms
Node-based optimal algorithms (Figure 3) based on certain graph decomposition is a method can find an optimal path, with a principle of exploring among a set of cells in the map, where information sensing and processing procedures are already executed. It can be divided into two groups: the first group is the grid search algorithms, the grid based or evidential occupancy grid method is widely used in the field of autonomous driving, especially in low-speed scenes as they are not suitable for high-speed driving, as it consists of mapping the environment to a set of cells, and each cell represents the presence of an obstacle at that position; if it contains information in the evidence form, such as the mass or the belief value, which is called the evidential occupancy grid. This approach needs an algorithm to generate a feasible path toward the final goal. In [8], the authors use two optimal search algorithms A* and D* to find the global optimal path that connects the initial position of each cell to the goal position (will be discussed in the next section). Researchers in [9] use the clothoïd tentacles method for generating a set of clothoïds tentacles as feasible trajectories on an egocentric occupancy grid around the vehicle in operation. The clothoïd tentacles are a geometrical shape which is able to model possible trajectories. They are also known by considering the vehicle’s current steering angle and making smooth variations in the vehicle’s main dynamic variables, such as the yaw rate, the side-slip angle, and the steering angle. In the work [10], a local trajectory planning is built based on the following of a desired reference trajectory defined on the map while avoiding collisions by using the perception information that represents the environment. The authors create and update the occupancy grid with sensors data, the generated tentacles will represent the feasible trajectories, and then the best tentacle is chosen. The main objective of this method is to integrate and manage uncertainties of the environment for trajectory planning for autonomous driving [11].
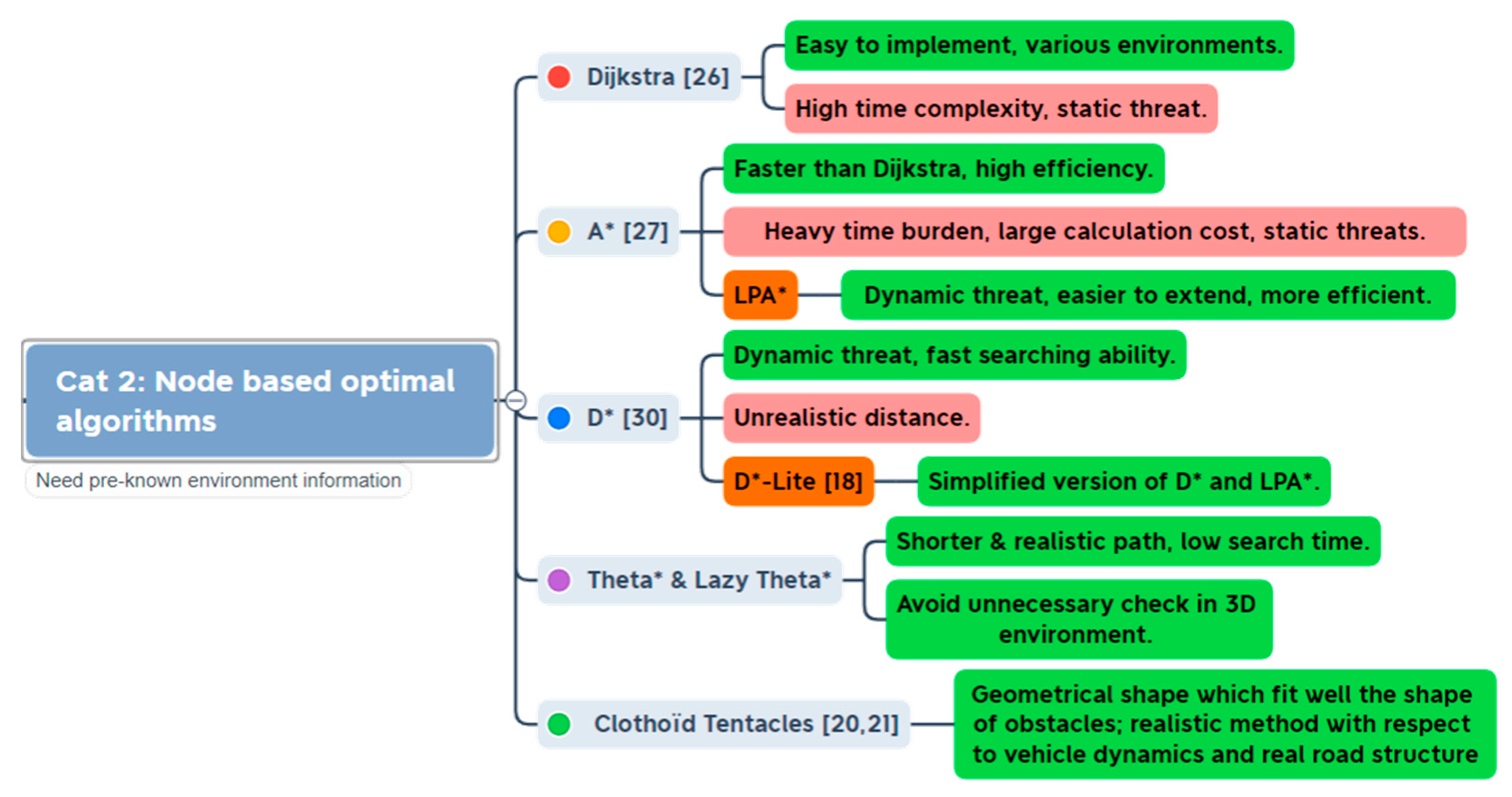
Figure 3. Node-based optimal approaches with the main advantages and drawbacks.
2.3. Mathematic Model Based Algorithms
The third category of path planning is the mathematic model-based algorithms presented in Figure 4. This field can be split into two subcategories: linear algorithms and optimal control. In general, this category is based on geometrical approaches that model the environment and the system in order to build the kinematic and dynamic system. Then, a cost function is used to achieve an optimal solution.
The linear algorithms include flatness, which employs differential flatness to ensure control flatness along the reference path; it deals with control disturbance and its uncertainty. Mixed integer linear programming MILP and binary linear programming BLP, which is a special case of linear programming, is found in some works to have variables that have only 0 and 1 integer values. MILP combines both binary and integer logical constraints which offer a close representation of the environment, so as the system [12].
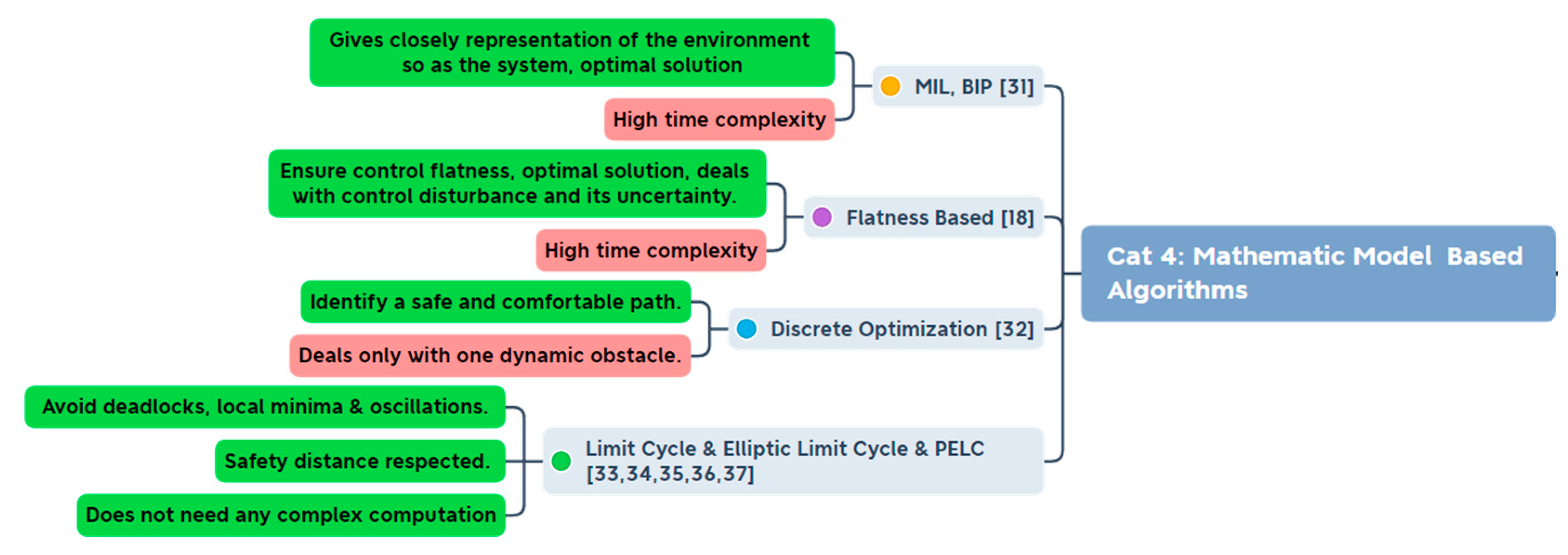 Figure 4. Mathematic model-based approaches with the main advantages and drawbacks.
Figure 4. Mathematic model-based approaches with the main advantages and drawbacks.2.4. Bio-Inspired Algorithms
In the light of the inspired technique from biological behavior, herein reach bio-inspired algorithms, in Figure 5. The principle of these methods is to search a near optimal path based on stochastic approaches. It is characterized by solving the “NP” problems, which are nonlinear problems with a large number of variables, and are known by the nonlinear objective functions with a high complexity to overcome the algorithms fails or falling into local minima.
This method includes both neural network and evolutionary algorithms, such as genetic algorithm “GA”, particle swarm optimization PSO, ant colony optimization “ACO”, shuffled frog leaping algorithm “SFLA”, and so on.
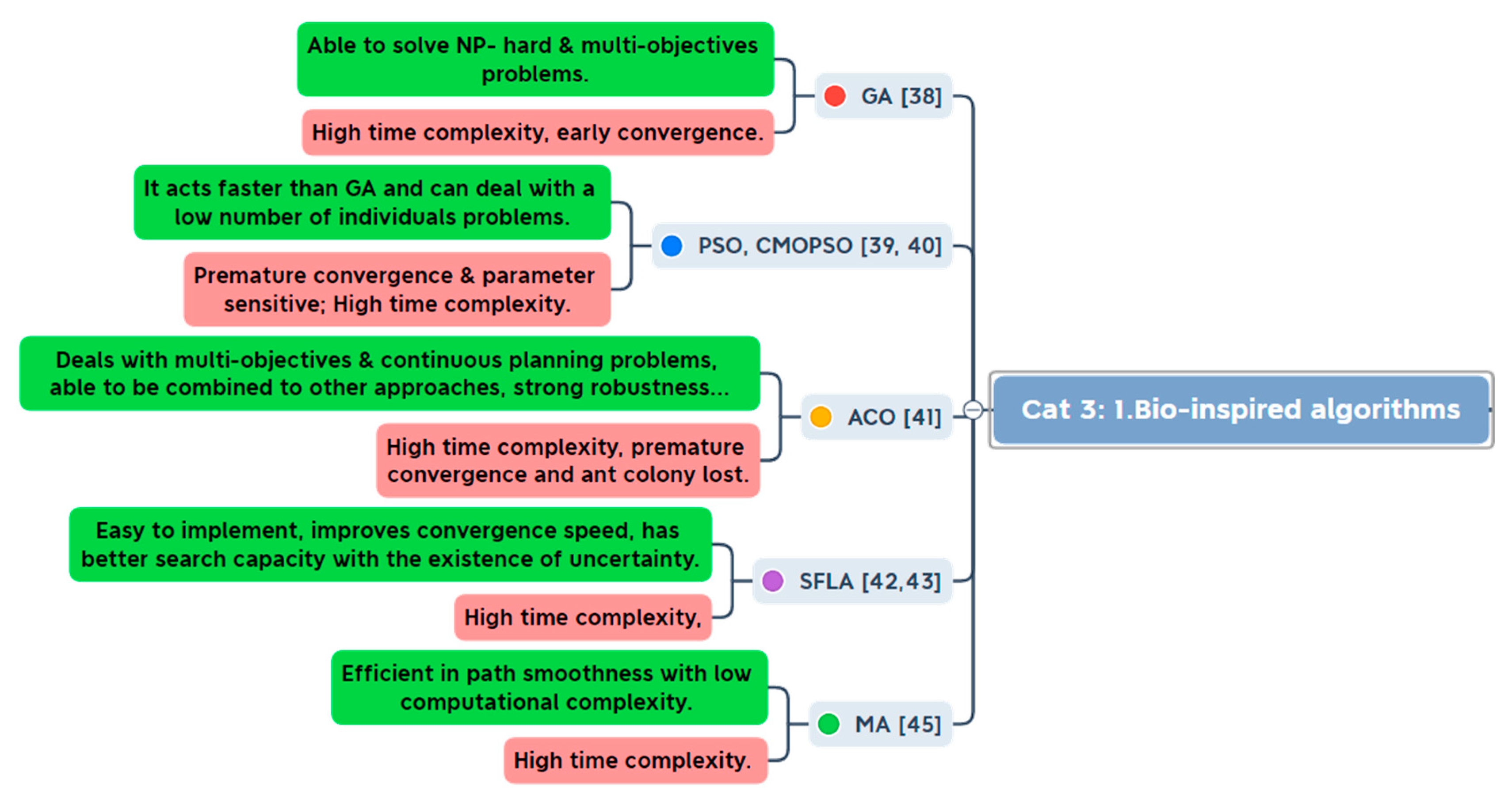 Figure 5. Evolutionary algorithms with the main advantages and drawbacks.
Figure 5. Evolutionary algorithms with the main advantages and drawbacks.2.5. Multi-Fusion-Based Algorithms
Since fusion-based become the solution to improve 3D path planning performance, multi-fusion-based algorithms, Figure 6, are introduced. In this kind of analysis, a single approach is not enough to provide an optimal path. In addition, in the presence of unknown environments and the existence of either static or dynamic obstacles, the robot should deal with such a situation and make a decision. Thus, trying to combine different approaches was a feasible solution to come out with a fast searching and optimal algorithm. Multi-fusion algorithms can be divided in two categories: embedded multi-fusion algorithms and ranked multi-fusion algorithms. The first one combines two algorithms or more and gathers the advantages of each, the algorithms work simultaneously to improve a high performance, whilst the second one forms a hierarchical structure, where each algorithm works separately [13][14].
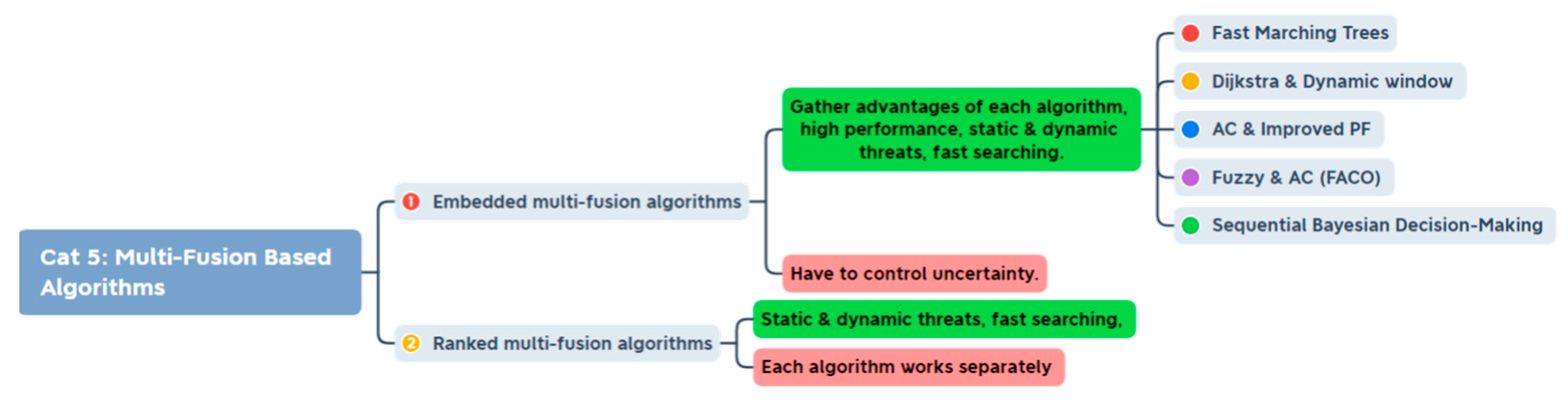 Figure 6. Multi-Fusion based algorithms with the main advantages and drawbacks.
Figure 6. Multi-Fusion based algorithms with the main advantages and drawbacks.3. Conclusions
Here presented all the most used methods throughout the literature in path planning for autonomous vehicles in navigation tasks. The trajectory planning is not only a path generation from an initial point towards the final point, but also it should ensure optimality and smoothness of the chosen path in different environments, either local or global. Moving the vehicle from point A to B requires techniques of perception, state estimation, trajectory planning, and motion control. Although many autonomous navigation systems have been proposed, they generally follow a classic hierarchical planning paradigm.
References
- Latrech, C.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Integrated Longitudinal and Lateral Networked Control System Design for Vehicle Platooning. Sensors 2018, 18, 3085.
- Boukhari, M.R.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle. Sensors 2018, 18, 1893.
- Hamieh, A. Planification Automatique de Chemins à L’Intérieur de Bâtiments Basée sur un Modèle BIM. Ph.D. Thesis, Université de Valenciennes et du Hainaut-Cambresis, Valenciennes, France, 2018.
- Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm. Energies 2019, 12, 2342.
- Prochowski, L.; Ziubiński, M.; Szwajkowski, P.; Gidlewski, M.; Pusty, T.; Stańczyk, T.L. Impact of Control System Model Parameters on the Obstacle Avoidance by an Autonomous Car-Trailer Unit: Research Results. Energies 2021, 14, 2958.
- Zhang, L.; Zhang, Y.; Li, Y. Path planning for indoor mobile robot based on deep learning. Optik 2020, 219, 165096.
- Qian, K.; Liu, Y.; Tian, L.; Bao, J. Robot path planning optimization method based on heuristic multi-directional rapidly-exploring tree. Comput. Electr. Eng. 2020, 85, 106688.
- Xu, W.; Pan, J.; Wei, J.; Dolan, J.M. Motion planning under uncertainty for on-road autonomous driving. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2507–2512.
- Mouhagir, H.; Cherfaoui, V.; Talj, R.; Aioun, F.; Guillemard, F. Using evidential occupancy grid for vehicle trajectory planning under uncertainty with tentacles. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7.
- Mouhagir, H.; Cherfaoui, V.; Talj, R.; Aioun, F.; Guillemard, F. Trajectory Planning for Autonomous Vehicle in Uncertain Environment Using Evidential Grid. IFAC-PapersOnLine 2017, 50, 12545–12550.
- Alia, C.; Tagne, G.; Talj, R.; Charara, A. Local Trajectory Planning and Tracking of Autonomous Vehicles, Using Clothoid Tentacles Method. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 674–679.
- Ioan, D.; Ionela, P.; Sorin, O.; Florin, S.; Silviu-Iulian, N. Mixed-integer programming in motion planning. Annu. Rev. Control. 2021, 51, 65–87.
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of Robot 3D Path Planning Algorithms. J. Control. Sci. Eng. 2016, 2016, 7426913.
- Iberraken, D.; Lounis, A.; Dieumet, D. Multi-Controller Architecture for Reliable Autonomous Vehicle Navigation: Combination of Model-Driven and Data-Driven Formalization. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 245–251.
More
Information
Subjects:
Automation & Control Systems
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
763
Revisions:
5 times
(View History)
Update Date:
28 Feb 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No