Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Shilin Wang | + 4281 word(s) | 4281 | 2022-02-22 08:45:57 | | | |
| 2 | Jessie Wu | Meta information modification | 4281 | 2022-02-23 04:29:37 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Wang, S. Chemical Control Techniques for Vegetables. Encyclopedia. Available online: https://encyclopedia.pub/entry/19779 (accessed on 21 July 2026).
Wang S. Chemical Control Techniques for Vegetables. Encyclopedia. Available at: https://encyclopedia.pub/entry/19779. Accessed July 21, 2026.
Wang, Shilin. "Chemical Control Techniques for Vegetables" Encyclopedia, https://encyclopedia.pub/entry/19779 (accessed July 21, 2026).
Wang, S. (2022, February 23). Chemical Control Techniques for Vegetables. In Encyclopedia. https://encyclopedia.pub/entry/19779
Wang, Shilin. "Chemical Control Techniques for Vegetables." Encyclopedia. Web. 23 February, 2022.
Copy Citation
Diseases and pests are important factors in vegetable cultivation; they not only affect the growth and appearance of vegetables but also affect the yield and quality. The disease and pest control of vegetables is dominated by chemical sprays, for now. As a result, the excessive use of pesticides has been a crucial factor of pesticides’ non-point source pollution, and it is also the main cause of excessive pesticide residues in vegetables.
greenhouse
sprayer
vegetables
1. Introduction
Vegetables are the most important food for consumers in daily life, providing irreplaceable nutrients and vitamins. Diseases and pests are important factors in vegetable cultivation; they not only affect the growth and appearance of vegetables but also their yield and quality [1][2][3][4]. However, there are variety of vegetable diseases and pests, especially in protected agriculture with high humidities and temperatures, eliciting the more frequent occurrence of diseases and pests [5][6][7].
2. Chemical Control Techniques and Equipment
2.1. Greenhouse Vegetables
Protected agriculture is undergoing rapid development driven by the advances in artificial intelligence, precise control and data processing [8]. Although the mechanized production of protected agriculture has made tremendous progress in the past few years, the application of agrichemicals in greenhouses is still subject to closed conditions and working spaces; correspondingly, the progress of protected vegetable protection machinery is relatively backward [9]. According to the application method, greenhouse sprayers can be divided into handheld or knapsack sprayers, self-propelled or ground track sprayer, and aerial track or fixed-pipe sprayers. These sprayers are introduced below.
2.1.1. Handheld Sprayer
Pesticide application in greenhouses is limited by the closed conditions and operating spaces. Therefore, the application of pesticides in greenhouses predominantly uses knapsack sprayers, knapsack mist sprayers, fogger sprayers, and spray guns or lances connected to a spraying trolley (Figure 1) because they are not restrained by planting patterns and space [10].
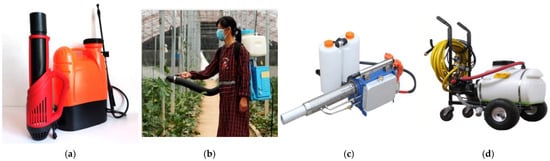
Figure 1. Major types of handheld and knapsack sprayers: (a) air-assisted knapsack sprayer, (b) knapsack mist sprayer, (c) thermal fogger sprayer, and (d) spraying trolley.
Knapsack manual or electric sprayers are the most widely used pesticide application equipment because of the heave weight, loud noise, and inconvenience of operation of motor knapsack sprayers. Conventional knapsack sprayers perform very poorly in droplet penetration. In order to improve this issue, Wang et al. [11] developed an air-assisted electric knapsack sprayer to optimise the penetration of the spraying liquid on the tomato canopy. Li et al. [12] evaluated the application performance of the air-assisted knapsack sprayer in greenhouse tomato and field cucumbers. The results showed that the sprayer could improve the effectiveness of pesticides, and decrease the risk of pesticide exposure and residue.
The handheld spray gun is still commonly applied in protected vegetable production, on account of its ease of operation and low economic cost. The structure and working principle of the spray gun are simple. However, the application parameters of the spray gun play a crucial role in its deposition. Choosing the appropriate parameters for the application of pesticides is pretty crucial. In order to investigate the effect of the application pressure on adherence and run-off, spray applications of a spray lance (gun) were conducted with three different pressures in two developmental tomato greenhouses [6]. The results showed that the sprays at high pressures did not increase the adherence and distribution uniformity of the droplets compared with the sprays at low pressures, and the suggested pressure was between 1000 kPa and 1500 kPa. Rincon et al. [10] evaluated the effect of the working pressure and application volume of a manual spray gun on greenhouse peppers. The results also indicated that for the spraying of agrichemicals with the manual spray lance in a greenhouse, the adoption of high pressures (>2000 kPa) was not justified. Nonetheless, some studies found that a lower application pressure or rate resulted in the uneven distribution of the droplets on the canopy [13]. For different vegetables and growth periods, the specific operating parameters of a handheld spray gun still need to be explored further.
These handheld knapsack sprayers and spray guns provide high-volume application with a coarse spray quality and low operation efficacy. Compared with knapsack sprayers and spray guns, knapsack mist sprayers and fogger sprayers are more efficient and can greatly reduce labor intensity. Wang et al. [9] designed a novel electric knapsack mist sprayer consisted of a spraying unit and a trailer. The atomizer of the sprayer was an air-assisted nozzle with air-flow deflectors, which could shear the atomized droplets into mist and transmit them in the greenhouse. In addition, studies have shown that the deposition characteristics of the manual thermal fogger sprayer and cold fogger sprayer were similar to those of a manual mist sprayer [9][14], and the liquid distribution of these sprayers decreases with an increasing spray distance. It is worth mentioning that the thermal fogger sprayer is mainly used in plastic greenhouses in developing countries, and that it is used very little in Europe due to the fact that there are few plant protection products authorized for this technique, and very demanding conditions are required for its use. Therefore, the uniformity of the droplet distribution in greenhouse applications should be further improved for mist and fogger sprayers.
Besides this, electrostatic spray technology can improve the deposition efficiency of pesticides on the leaves and reduce the pollution of pesticides in the environment. It has been recognized as an effective way to increase the utilization of pesticides and improve the uniformity of spray deposition [15]. It aims to establish a strong electrostatic field or to create a difference in charge between the nozzle and target, such that charged droplets can be deposited on the target in a directional and efficient way under the combined action of electrostatic and other external forces [16]. Therefore, electrostatic spray technology and equipment have been implemented for plant protection in field crops and greenhouses [17][18]. Mamidi et al. [19] designed an induction charge-based electrostatic knapsack spray system which offers the optimum electrode position and electrical conductivity of liquid. The application results of the spray system showed that there is a two- to threefold increase of chemical deposition with a better uniformity on the potted plant.
On the whole, greenhouse pesticide application with a handheld or knapsack sprayer are inefficient and require high labor intensity, and it is arduous for a sprayed liquid to penetrate into the vegetation canopy. New kinds of intelligent and efficient sprayers or techniques that can adapt to different greenhouse structures, growing patterns and operational spaces are needed on an urgent basis.
2.1.2. Self-Propelled or Ground Track Sprayers
In order to eliminate the contamination of pesticide application, greenhouse sprayers have been developed or modified with automation and intelligence methods, such as navigation techniques for autonomous mobile robots and sprayers (Figure 2) [20][21][22]. A mobile robot called Fitrobot was developed at the University of Almeria [20], and autonomous navigation in a greenhouse was realized by using both deliberative and pseudo-reactive techniques. This mobile robot permits movement between lines of crops; in this case, agricultural operations such as spraying and pruning can be performed while the robot is moving. Balsari et al. [21] designed an autonomous self-propelled sprayer prototype which is able to precisely apply pesticides on protected vegetables. The sprayer is able to pass along the alleys between the crop rows in the glasshouses or tunnels, and the operator can stand outside the treated area during the pesticide application. Lee et al. [22] designed an accurate driving algorithm for autonomous greenhouse sprayer navigation. The driving algorithm was carried by an automatic turning algorithm under no-rail circumstances, and a photo sensor was additionally installed on the sprayer to detect the beginning of a turning area, which maximized the utilization of a greenhouse space. These autonomous greenhouse sprayers avoided the exposure of the operator to pesticides, and reduced labor intensity.

Figure 2. Major types of ground sprayers in greenhouses: (a) crawler self-propelled sprayer, (b) ground track sprayer, (c) self-propelled sprayer, (d) self-propelled ultrasonic atomizer, and (e) self-propelled mist sprayer.
In order to better adapt to the narrow spraying space in the greenhouse, a variety of self-propelled and manual trolley sprayers are equipped with vertical spray booms. Sanchez-Hermosilla et al. [23] equipped two vertical spray booms on a manual trolley, and compared their spray deposits with a spray gun. The results indicated that the deposits with the spray trolley were significantly greater than those with the spray gun. They also equipped the vertical spray boom on a self-propelled vehicle. The deposition on the canopy and the loss to the ground applied by the self-propelled vehicle and a gun sprayer were compared in a tomato greenhouse [24]. The results showed that the vertical spray booms could improve the application of pesticides compared with spray gun. Furthermore, the vertical booms improved the evenness of the droplet distribution on the canopy and reduced the run-off.
The application of a vertical spray boom is a prospective method for the safe and efficient application of pesticides in greenhouse vegetables, and they have also been applied for greenhouse plants grown on hanging shelves [25][26]. Nevertheless, the nozzle selection, spray boom arrangement, application space and airflow of vertical boom sprayers require attentive consideration. Nuyttens et al. [27] optimized the vertical spray booms of a Fumimatic motor-driven sprayer and a manually driven trolley sprayer. He demonstrated that the spray with a 0.35-m nozzle spacing provided a much better spray distribution, and the optimal spray distance for 80° flat fan nozzles with the 0.35 m nozzle spacing was about 0.30 m. Llop et al. [28] added auxiliary airflow to the vertical boom of a handheld trolley sprayer, and the spray distribution results showed that flat-fan nozzles with air- assistance increased the penetrability into the tomato canopy. The air assistance vertical spray boom was also installed on a handheld trolley, a self-propelled sprayer and an autonomous self-propelled sprayer. The influence of air assistance on the spray application of these sprayers for greenhouse vegetables was evaluated, and the results indicated that increasing the air velocity does not increase the efficiency of the pesticide application [29]. Similarly, Foque et al. [25] demonstrated that air assistance did not have a positive influence on the droplet adherence and distribution in the canopy. The air assistance, air velocity, and spray direction of the vertical boom sprayer should be adapted on the basis of the vegetables and application characteristics.
As an alternative to conventional knapsack and handheld sprayers, some self-propelled or ground track mist sprayers are gaining popularity among greenhouse cultivation farmers. Wu et al. [30] developed a variable self-propelled mist sprayer based on Wi-Fi and fuzzy control, which realized automatic variable spraying and man–machine separation in the greenhouse. In the application process, the variable self-propelled mist sprayer moves on the ground track while swinging its nozzle up and down to spray in multiple directions. Musiu et al. [31] investigated the spray deposition of a greenhouse air-assisted mist sprayer. The sprayer contains an automated control unit for the facilitation of parameter settings, including the longitudinal inclination of the nozzle and an orthogonal spin of both the pumping unit and the nozzle mounting. The results indicated that the application volume of the mist sprayer significantly influenced the deposition and distribution uniformity, and there was a negative correlation between the spray volume and the distribution homogeneity. Li et al. [32] evaluated the spray deposition and distribution of a self-propelled high-energy ultrasonic atomizer. The atomizer was designed to for automatic application. The liquids are atomized by two atomizing chambers from a tank by means of ultrasonic waves, and are then blown out by volute centrifugal fans. The droplet volume median diameter is about 16–30 µm. The greenhouse application results showed that the atomizer could increase the depositions, especially on the underside and internal side of the canopies, and could lead to a reduction of the operator exposure risk.
These newly designed sprayers effectively improved the droplet distribution and decreased the labour strength and pesticide contamination of the operator [33][34]. Nevertheless, these sprayers are very limited by their expensive accessories, complex maintenance, and restrictions in adapting cropping patterns and greenhouse structures [9].
2.1.3. Aerial Track or Fixed-Pipe Spray Systems
Because hanging sprayers or spray systems are not affected by the planting patterns and spaces of greenhouse vegetables, and because the operator does not have to be present inside the greenhouse during the pesticide application, they are also used for greenhouse vegetable pest and disease control (Figure 3).
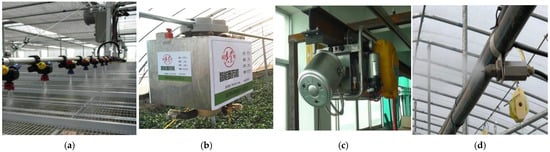
Figure 3. Major types of aerial track sprayers and fixed-pipe atomizers: (a) hanging boom sprayer, (b) autonomous air-assisted sprayer based on a single hanging track, (c) hanging cold fog sprayer, and (d) twin-fluid nozzle mounted on a fixed-pipe.
In a multi-span greenhouse, most nursery vegetable farms adopt horizontal boom sprayers for pesticide application. These horizontal booms are usually suspended from the top of the greenhouse, and their travel speed and spray volume can be adjusted according to the actual needs. In order to optimize the methods and regulation criteria of sprayer machines in greenhouses, Failla et al. [35] investigated the use of a horizontal spray boom for the application of agrichemicals in different spraying parameters and velocities. The results indicated that the horizontal spray boom could be an alternative solution to the manual sprayer, the pressure of the spray should be reduced, and the arrangement of the outermost nozzles may also be better set on the boom.
Similarly, the fog cooling system to manage the temperature and humidity inside the greenhouse was also used for pesticide application. The pesticide application performance of an air–water fogging system with a network of pipes located in the upper part (3 m from the ground) of the greenhouses was evaluated [36]. The results showed that the cooling system increased ground loss, and only a small amount of liquid adhered on the canopy. Li et al. [37] designed a fixed-pipe cold fogging system which could achieve unmanned pesticide application throughout the entire greenhouse with an acceptable variable coefficient of deposition, while the amount of deposition on the canopy was low.
In order to overcome the constraints that the narrow application space and the complexity of auxiliary equipment impose on ground sprayers, researchers began to explore the spraying performance of cold foggers hanging in greenhouses. Olivet et al. [38] evaluated the density and distribution of droplets by a stationary cold fogger placed 2 m high in a pepper greenhouse. A consistent decline of deposition from the area nearest to the cold fogger to the far end of the greenhouse was observed, which resulted in the uneven deposition of pesticides. Delightfully, the control efficacy of thrips and powdery mildew was generally adequate. In order to clarify the airflow field and droplet distribution of a hanging cold fogger or sprayer, several numerical spraying models based on computational fluid dynamics were established [39]. These models can be used to analyze and optimize the spraying performance of a hanging cold fogger (sprayer).
Besides this, Lin et al. [40] developed an autonomous and air-assisted sprayer based on a single hanging track. A short two-way spray boom with two centrifugal fans and joint stacking nozzles was equipped on the sprayer, which can spray over and drop into the inter-row of the crops through the auxiliary grid. The performances in a cucumber greenhouse indicated that this sprayer is suitable for high-efficiency autonomous spraying, which provides a predictable solution for plant protection in solar greenhouses.
2.2. Open-Field Vegetables
In terms of open-field vegetables, the crop protection machines are the same as field cereal crops. Boom sprayers are the most widely used plant protection machinery in the field, and the application of plant protection unmanned aerial vehicles (UAV) is becoming increasingly pervasive. In addition, some conventional handheld or knapsack sprayers are also used for the pest and disease control of the open-field vegetables. This paper focuses on the introduction of boom sprayers and plant protection UAVs.
Boom sprayers are a kind of hydraulic sprayer installed with nozzles on the horizontal or vertical boom, which are widely used for the protection of open-field vegetables and crops. Compared with conventional handheld sprayers, pesticide application by boom sprayer dramatically reduces the labor intensity and improves the operating efficiency. The boom sprayer used for open-field vegetables is mainly the horizontal boom, and the boom is the critical component to realize the stable performance of the sprayer.
In order to optimize the spraying performance of a boom sprayer, the structure of the spraying boom, the technology of vibration reduction, and the balance of the spraying boom have to be optimized [41]. Anthonis et al. [42] studied the main modes of movement in the boom operation, and designed a horizontal active suspension, reducing yawing and jolting well. Ramon et al. [43] used a series compensator to control the horizontal vibration of a flexible boom, and concluded that electro-hydraulic control suspension can reduce the amplitude of the boom by more than 69%. Dou et al. [44] designed a boom height detection system based on ultrasonic sensors, which provided a theoretical basis for use in the development of an automatic boom height adjustment system. Jeon et al. [45] developed on-board sprayer instrumentation which can be useful in the design of future sprayers and spray booms, and can assist in decisions regarding sprayer suspensions and operating speeds, boom design length, and the use of active boom suspensions. The R4030XN-type boom sprayer developed by John Deer adopts a multistage anti-vibration design combined with a four-link system and air bag, and is equipped with a boom height sensor, an automatic spray boom level holding system, and an independent boom spraying control system, which can accurately control the spray effect and the height of the spray boom off the ground, and can adapt to a variety of terrain spraying operations.
The above research on the boom structure, anti-vibration device and intelligent control system of the boom sprayer has greatly improved the deposition and distribution uniformity of pesticide droplets but has not solved the problems of pesticide drift and poor penetration. In order to optimize the deposition rate of droplets, pneumatic cover spray technologies such as air curtains, wind curtains and air bags are installed on the spray boom; the airflow generated by them can change the trajectory of the droplets, so as to increase the downward penetration of the droplets and reduce the drift of pesticide droplets [46]. Jia et al. [47] designed an inductive charge electrostatic nozzle and equipped it on a pneumatic auxiliary boom sprayer, which provided a reference for the design of a wind-curtain electrostatic boom sprayer.
Teske et al. [48] analyzed the flow and deposition of droplets under a perpendicular wind direction to the ground sprayer boom. The measurements were used to predict the behavior of droplets released from nozzles on a spray boom during actual ground sprayer operations. In order to investigate and understand the anti-drift performance of air-assisted boom sprayers, computational fluid dynamics (CFD) simulation was used to investigate effects of downward wind velocity on the reduction of spray drift [49][50]. The results of those studies provide air-assisted spraying operations with valuable information, which is beneficial for the reduction of spray drift from air-assisted sprayers.
Yasin designed an air-assisted sleeve boom sprayer. The fine droplets produced were directed toward the crop canopy by an air stream that was emitted through 29 holes in the air sleeve fitted behind the spray boom. The field experiment results showed that the air-assisted sprayer gave approximately 5–7% drift loss, whereas the conventional sprayer loss was about 20–25% [51]. Thakare et al. [52] also designed a new air sleeve boom sprayer, and its performance was evaluated in laboratory and field trials. The appropriate air velocity, air sleeve angle, nozzle angle and height of the boom were given in order to acquire the effective droplet density and droplet size for the control of pests.
Besides the air-assisted boom sprayer, the shield boom sprayer has also been used to improve the spraying performance. The shield boom sprayer guides and changes the path of the airflow movement around the nozzle by adding a diversion plate on the spray boom, and at the same time produces a push force to the crop in order to improve the penetrability of the droplets and reduce the potential spray drift. Ozkan et al. [53] designed several spray boom shields. The drift potential of each shield was tested in a wind tunnel. The results showed that all of the shields effectively reduced spray drift by directing more of the small, drift-prone spray droplets toward the ground. Wang et al. [54] designed and optimized a shield boom sprayer, and compared the characteristics of the drift reduction and droplet deposition between a conventional boom sprayer and the shield boom sprayer. The results showed that the shield could effectively reduce drift, and the effect on the standard flat fan nozzle ST110-02 was stronger than that of the air injection nozzle IDK120-02, and the shield could also improve the penetration effect of droplets into the lower parts of the canopy. Compared with an air-assisted device, the shield has a simple structure and a low cost. Shields have been considered as economically viable alternatives to expensive air-assisted sprayers [55].
Currently, boom sprayers have been characterized by low vibration, a wide width and high intelligence, which can meet the requirements of boom multi-section and ground copying spray.
With the labor population migration from rural to urban areas and the aggravation of population aging, there is an urgent need for new equipment for pesticide application that can adapt to small plots and cropping patterns. In recent years, pesticide application by UAVs has been rapidly developed in China and other Asian counties [56]. It is very suitable for complex terrain, highly efficient, and capable of dealing with sudden disasters with low risk [57].
Over the past few years, extensive research regarding the flight platform, spraying system and application performance of UAVs has been conducted. Huang et al. developed a spraying system for a UAV platform [57] which could provide accurate and site-specific pest and diseases control when coupled with UAVs. Wang et al. [58] designed a pulse-width modulation (PWM) variable spraying system based on miniature UAV, which realized the precision control of the spraying volume. Electrostatic spray was also implemented in aerial applications: Wang et al. [59] designed a bipolar contact electrostatic spraying system for UAVs; charged droplets can produce a wrap-around effect on the underside of the leaves, which promotes the adhesion of the droplets on the underside of the leaves. Meanwhile, research on electrostatic spray technology has mainly focused on the prototype testing and evaluation of the droplet charge effect, and a few mature products are in the industrialization stage [60].
The flying and spraying parameters of UAVs influence the droplet deposition and drift significantly. In order to optimize the adherence and drift characteristics of the pesticide droplets of unmanned aerial spraying, researchers have conducted a lot of research on the application parameters of UAVs [61][62][63][64][65][66]. These studies have laid a solid foundation for unmanned aerial spraying, and the droplet distribution and deposition rate of the UAVs have been significantly improved. Now, the aerial application of UAVs is increasingly used in vegetables and orchards.
2.3. Vegetable Seed Treatment
Seed treatment is an economical and effective method in plant disease and insect control. The common methods of seed treatment mainly include two categories: non-chemical methods and chemical methods. The chemical solution uses chemicals to kill the pathogens carried by the seeds, and also prevents soil-borne pests, so as to enhance the crop performance. The existing chemical seed treatment methods include dry coating, film coating, dressing, encrusting and pelleting. Vegetable seeds are small and irregular, such that they need to be treated with encrusting and pelleting (Figure 4).
Figure 4. Vegetable seeds in pellets.
Vegetable seed encrusting and pelleting are special coating technologies which work by adding the liquid-containing binders, powdered fillers, plant protectants and nutritional ingredients to be processed into fully wrapped seeds. Encrusted vegetable seeds may also be defined as small pellets, but the original shape of the encrusted seed is retained [67]. In the seed coating process, the active components and other coating materials are applied to vegetable seeds by the applicable facilities in desired shape. Seed coaters can be divided into rotary seed coaters and drum seed coaters according to the working principle (Figure 5). The overall goal of vegetable seed pelleting equipment is to obtain compact and homogeneous products without inducing any damage to the vegetable seeds during treatment [68].

Figure 5. Major types of seed coater: (a) rotary seed coater, and (b) drum seed coater.
For the purpose of the optimization of the performance of small, irregular vegetable seed coating and pelleting, Qiu et al. [69] established a three-dimensional simulation model of a coating pan by using the enhanced discrete element method (EDEM) and Solid-Works to simulate the process of the pellet coating of small-particle irregular seeds. Kangsopa et al. [70] studied the seed coating formula and evaluated the integrity of lettuce seeds; the germination results of the lettuce showed that there were significant differences between the commercial pellets and uncoated seeds. At the same time, it was concluded that the gypsum–CaCO3 matrix was optimal for the pelleting of green oak lettuce seeds. Javed et al. [71] optimized different local low-cost pelleting materials to pellet tomato seeds. The results indicated that the highest value for tomato seedling length was achieved with talcum:CaO:talcum:bentonite. Amirkhani et al. [72] adopted plant-derived protein hydrolysates as powdered fillers. At the same time, seed coating formulations using soy flour as a biostimulant were developed with broccoli seeds. The estimated results illustrated that the strength and the disintegration time of the pellet seed increased with the increasing of the percentages of soy flour. Qiu et al. [73] blended a biostimulant into the coating fillers; the germination and growth potential results of the pelleted seeds showed that the addition of biostimulants could enhance the yields and sustainability of horticultural production.
In Europe and the United States, all vegetable and flower seeds have realized pelletizing coatings with a high-speed pelletization processing technology. After the coating of the seeds, the specifications, germination rate, emergence, and resistance to disease are all at a high level. The pelleting equipment is of high production efficiency, and shows stable equipment performance, a low failure rate and high quality [74].
References
- Singh, S.S.; Dwivedi, S.K. Evaluation of different newer chemical pesticides through on farm testing (OFTs) against major pests and diseases of vegetable crops. Progress. Hortic. 2020, 52, 193–198.
- Ngosong, N.T.; Boamah, E.D.; Fening, K.O.; Kotey, D.A.; Afresh-Nuamah, K. The efficacy of two bio-rational pesticides on insect pests complex of two varieties of white cabbage (Brassica oleracea var. capitata L.) in the coastal savanna region of Ghana. Phytoparasitica 2021, 49, 397–406.
- Özdemir, E.; Inak, E.; Evlice, E.; Laznik, Z. Compatibility of entomopathogenic nematodes with pesticides registered in vegetable crops under laboratory conditions. J. Plant Dis. Prot. 2020, 127, 529–535.
- Ramasamy, S.; Sotelo, P.; Lin, M.; Heng, C.H.; Kang, S.; Sarika, S. Validation of a bio-based integrated pest management package for the control of major insect pests on Chinese mustard in Cambodia. Crop Prot. 2020, 135, 104728.
- Li, X.; Lu, D.; Wang, S.; Fan, D.; Zhou, H.; Lv, X. Simulation and test on droplet distribution and deposition of fixed-pipe cold fogging system in greenhouse. Trans. CSAM 2020, 51 (Suppl. S2), 261–267.
- Sánchez-Hermosilla, J.; Páez, F.; Rincón, V.J.; Carvajal, F. Evaluation of the effect of spray pressure in hand-held sprayers in a greenhouse tomato crop. Crop Prot. 2013, 54, 121–125.
- Nguyen, T.M.; Le, N.T.T.; Havukainen, J.; Hannaway, D.B. Pesticide use in vegetable production: A survey of Vietnamese farmers’ knowledge. Plant Protect. Sci. 2018, 54, 203–214.
- Shamshiri, R.R.; Kalantari, F.; Ting, K.C.; Thorp, K.R.; Hameed, I.A.; Weltzien, C.; Ahmad, D.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. 2018, 11, 1–21.
- Wang, S.; Li, X.; Liu, Y.; Lv, X.; Zheng, W. Comparison of a new knapsack mist sprayer and three traditional sprayers for pesticide application in plastic tunnel greenhouse. Phytoparasitica 2022, 50, 177–190.
- Rincon, V.J.; Sanchez-Hermosilla, J.; Paez, F.; Perez-Alonso, J.; Callejon, A.J. Assessment of the influence of working pressure and application rate on pesticide spray application with a hand-held spray gun on greenhouse pepper crops. Crop Prot. 2017, 96, 7–13.
- Wang, S.; Song, J.; He, X.; Li, Y.; Ling, Y. Design of air-assisted electric knapsack sprayer and experiment of its operation performance. Trans. CSAE 2016, 32, 67–73.
- Li, Y.J.; Li, Y.F.; Pan, X.; Li, Q.X.; Chen, R.; Li, X.; Pan, C.; Song, J. Comparison of spray deposition, loss and residue of azoxystrobin and tebuconazole in sunlit greenhouse tomato and field cucumber of a new air-assisted sprayer and two conventional sprayers. Pest Manag. Sci. 2017, 74, 448–455.
- Lee, A.W.; Miller, P.C.H.; Power, J.D. The application of pesticide sprays to tomato crops. Asp. Appl. Biol. 2000, 57, 383–390.
- Ebert, T.A.; Derksen, R.C.; Downer, R.A.; Krause, C.R. Comparing greenhouse sprayers: The dose-transfer process. Pest Manag. Sci. 2004, 60, 507–513.
- Law, S.E. Agricultural electrostatic spray application: A review of significant research and development during the 20th century. J. Electrostat. 2001, 51–52, 25–42.
- Tavares, R.M.; Cunha, J.P.; Alves, T.C.; Bueno, M.R.; Silva, S.M.; Zandonadi, C.H. Electrostatic spraying in the chemical control of Triozoida limbata (Enderlein) (Hemiptera: Triozidae) in guava trees (Psidium guajava L.). Pest Manag. Sci. 2017, 73, 1148–1153.
- Shen, C.; Jia, S.; Tang, Z.; Zhou, Y.; Meng, X.; Yuan, L. Research actuality and application prospects of pesticide electrostatic spraying. J. Agric. Mech. Res. 2010, 32, 10–13.
- Law, S.E. Embedded-electrode electrostatic-induction spray-charging nozzle: Theoretical and engineering design. Trans. ASAE 1978, 21, 1096–1104.
- Mamidi, V.R.; Ghanshyam, C.; Kumar, P.M.; Kapur, P. Electrostatic hand pressure knapsack spray system with enhanced performance for small scale farms. J. Electrost. 2013, 71, 785–790.
- Gonzalez, R.; Rodriguez, F.; Sanchez-Hermosilla, J.; Donaire, J.G. Navigation techniques for mobile robots in greenhouses. Appl. Eng. Agric. 2009, 25, 153–165.
- Balsari, P.; Oggero, G.; Bozzer, C.; Marucco, P. An autonomous self-propelled sprayer for safer pesticide application in glasshouse. Asp. Appl. Biol. 2012, 114, 197–204.
- Lee, I.; Lee, K.; Lee, J.; You, K. Autonomous greenhouse sprayer navigation using automatic tracking algorithm. Appl. Eng. Agric. 2015, 31, 17–21.
- Sanchez-Hermosilla, J.; Rincon, V.J.; Paez, F.; Fernandez, M. Comparative spray deposits by manually pulled trolley sprayer and a spray gun in greenhouse tomato crops. Crop Prot. 2012, 31, 119–124.
- Sanchez-Hermosilla, J.; Rincon, V.J.; Paez, F.; Agueera, F.; Carvajal, F. Field evaluation of a self-propelled sprayer and effects of the application rate on spray deposition and losses to the ground in greenhouse tomato crops. Pest Manag. Sci. 2011, 67, 942–947.
- Foqué, D.; Pieters, J.G.; Nuyttens, D. Spray deposition and distribution in a bay laurel crop as affected by nozzle type, air assistance and spray direction when using vertical spray booms. Crop Prot. 2012, 41, 77–87.
- Braekman, P.; Foque, D.; Van Labeke, M.; Pieters, J.G.; Nuyttens, D. Influence of Spray Application Technique on Spray Deposition in Greenhouse Ivy Pot Plants Grown on Hanging Shelves. Hortscience 2009, 44, 1921–1927.
- Nuyttens, D.; Windey, S.; Sonck, B. Optimisation of a vertical spray boom for greenhouse spraying applications. Biosyst. Eng. 2004, 89, 417–423.
- Llop, J.; Gil, E.; Gallart, M.; Contador, F.; Ercilla, M. Spray distribution evaluation of different settings of a hand-held-trolley sprayer used in greenhouse tomato crops. Pest Manag. Sci. 2016, 72, 505–516.
- Llop, J.; Gil, E.; Llorens, J.; Gallart, M.; Balsari, P. Influence of air-assistance on spray application for tomato plants in greenhouses. Crop Prot. 2015, 78, 293–301.
- Wu, Y.; Qi, L.; Zhang, Y.; Ji, R.; Cheng, Z.; Cheng, Y. Research and development of the mist sprayer control system in Greenhouse. J. China Agric. Univ. 2018, 23, 79–87.
- Musiu, E.M.; Qi, L.; Wu, Y. Spray deposition and distribution on the targets and losses to the ground as affected by application volume rate, airflow rate and target position. Crop Prot. 2019, 116, 170–180.
- Li, Y.J.; Li, Y.F.; Chen, R.H.; Li, X.S.; Pan, C.P.; Song, J.L. Evaluation of self-propelled high-energy ultrasonic atomizer on azoxystrobin and tebuconazole application in sunlit greenhouse tomatoes. Int. J. Environ. Res. Public Health 2018, 15, 1088.
- Nuyttens, D.; Braekman, P.; Windey, S.; Sonck, B. Potential dermal pesticide exposure affected by greenhouse spray application technique. Pest Manag. Sci. 2009, 65, 781–790.
- Nuyttens, D.; Windey, S.; Sonck, B. Comparison of operator exposure for five different greenhouse spraying applications. J. Agric. Saf. Health 2004, 10, 187–195.
- Failla, S.; Romano, E. Effect of spray application technique on spray deposition and losses in a greenhouse vegetable nursery. Sustainability 2020, 12, 7052.
- Sánchez-Hermosilla, J.; Páez, F.; Rincón, V.J.; Callejón, Á.J. Evaluation of a fog cooling system for applying plant-protection products in a greenhouse tomato crop. Crop Prot. 2013, 48, 76–81.
- Li, X.; Lv, X.; Zhang, M.; Lei, X. Droplet Distribution and Deposition of Fixed Pipes Cold Fogging System in Greenhouse. Trans. CSAM 2018, 49 (Suppl. S1), 199–204.
- Olivet, J.J.; Val, L.; Usera, G. Distribution and effectiveness of pesticide application with a cold fogger on pepper plants cultured in a greenhouse. Crop Prot. 2011, 30, 977–985.
- Li, H.; Qi, L.; Wang, P. 3-D simulation for airflow field and droplets deposition of hanging cold sprayer. Trans. CSAM 2014, 45, 103–109.
- Lin, J.; Ma, J.; Liu, K.; Huang, X.; Xiao, L.; Ahmed, S.; Dong, X.; Qiu, B. Development and test of an autonomous air-assisted sprayer based on single hanging track for solar greenhouse. Crop Prot. 2020, 142, 105502.
- Zhuang, T.F.; Yang, X.J.; Dong, X.; Zhang, T.; Sun, X. Research status and development trend of large self-propelled sprayer booms. Trans. CSAM 2018, 49 (Suppl. S1), 196–205.
- Anthonis, J.; Ramon, H. Design of an active suspension to suppress the horizontal vibrations of a spray boom. J. Sound Vib. 2003, 266, 573–583.
- Ramon, H.; Anthonis, J.; Moshou, D.; Baerdemaeker, J.D. Evaluation of a cascade compensator for horizontal vibrations of a flexible spray boom. J. Agric. Eng. Res. 1998, 71, 81–92.
- Dou, H.; Zhai, C.; Chen, L.; Wang, S.; Wang, X. Field Variation Characteristics of Sprayer Boom Height Using a Newly Designed Boom Height Detection System. IEEE Access 2021, 9, 17148–17160.
- Jeon, H.Y.; Womac, A.R.; Wilkerson, J.B.; Hart, W.E. Sprayer boom instrumentation for field use. Trans. ASAE 2004, 47, 659.
- Hislop, E. Experimental air-assisted spraying of young cereal plants under controlled conditions. Crop Prot. 1993, 12, 193–200.
- Jia, W.; Hu, H.; Chen, L.; Wei, Z.; Wei, X. Performance experiment on spray atomization and droplets deposition of wind-curtain electrostatic boom spray. Trans. CSAE 2015, 31, 53–59.
- Teske, M.E.; Thistle, H.W.; Lawton, T.C.R.; Petersen, R.L. Evaluation of the Flow Downwind of an Agricultural Ground Sprayer Boom. Trans. ASABE 2016, 59, 839–846.
- Tsay, J.R.; Liang, L.S.; Lu, L.H. Evaluation of an air-assisted boom spraying system under a no-canopy condition using CFD simulation. Trans. ASABE 2004, 47, 1887–1897.
- Baetens, K.; Nuyttens, D.; Verboven, P.; De Schampheleire, M.; Nicolaï, B.; Ramon, H. Predicting drift from field spraying by means of a 3D computational fluid dynamics model. Comput. Electron. Agric. 2007, 56, 161–173.
- Yasin, M. Air assisted sleeve boom sprayer. Ama-Agric. Mech. Asia Afr. Lat. Am. 2012, 43, 61–66.
- Thakare, S.K.; Saraf, V.V.; Mrudulata, D. Field evaluation of air assisted sleeve boom sprayer. Madras Agric. J. 2015, 102, 273–276.
- Ozkan, H.E.; Miralles, A.; Sinfort, C.; Zhu, H.; Fox, R.D. Shields to reduce spray drift. J. Agric. Engng Res. 1997, 67, 311–322.
- Wang, S.L.; Li, X.; Lei, X.H.; Gu, Y.; Herbst, A.; Bonds, J.; Lv, X. Influence of baffled shield boom sprayer on drift and deposition characteristics of droplet. Plant Prot. 2021, 47, 68–73.
- Furness, G.O. A comparison of simple bluff plate and axial fans for air-assisted, high-speed, low-volume spray application to wheat and sunflower plants. J. Agric. Eng. Res. 1991, 48, 57–75.
- He, X.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30.
- Huang, Y.; Hoffmann, W.C.; Lan, Y.; Wu, W.; Fritz, B.K. Development of a spray system for an unmanned aerial vehicle platform. Appl. Eng. Agric. 2009, 25, 803–809.
- Wang, L.; Lan, Y.B.; Hoffmann, W.C.; KFritz, B.; Chen, D.; Wang, S. Design of Variable Spraying System and Influencing Factors on Droplets Deposition of Small UAV. Trans. CSAM 2016, 47, 15–22.
- Wang, S.; Li, X.; Zhou, H.; Lv, X.; Shen, W. Design and Experiment of an Aerial Electrostatic Spraying System for Unmanned Agricultural Aircraft Systems. Appl. Eng. Agric. 2020, 36, 955–962.
- Zhou, L.; Zhang, L.; Xue, X.; Chen, C. Research progress and application status of electrostatic pesticide spraytechnology. Trans. CSAE 2018, 34, 1–11.
- Wang, D.S.; Zhang, J.X.; Zhang, S.L.; Xiong, B.; Qu, F.; Li, X.; Li, W.; Yuan, T. Spraying parameters and droplet deposition distribution analysis of CD-15 unmanned helicopter. Int. Agric. Eng. J. 2017, 26, 41–50.
- Qiu, B.J.; Wang, L.W.; Cai, D.L.; Wu, J.H.; Ding, G.R.; Guan, X.P. Effect of flight altitude and speed of unmanned helicopter on spray deposition uniform. Trans. CSAE 2013, 29, 25–32. (In Chinese)
- Qin, W.C.; Xue, X.Y.; Zhou, L.X.; Zhang, S.C.; Sun, Z.; Kong, W.; Wang, B. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies. Trans. CSAE 2014, 30, 50–56. (In Chinese)
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88.
- Wang, G.; Yubin, L.; Qi, H.; Chen, P.; Hewitt, A.J.; Han, Y. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 75, 1546–1555.
- Li, X.; Giles, D.K.; Niederholzer, F.J.; Andaloro, J.T.; Lang, E.B.; Watson, L.J. Evaluation of an unmanned aerial vehicle as a new method of pesticide application for almond crop protection. Pest Manag. Sci. 2021, 77, 527–537.
- Taylor, A.G.; Harman, G.E. Concepts and technologies of selected seed treatments. Annu. Rev. Phytopathol. 1990, 28, 321–339.
- Afzal, I.; Javed, T.; Amirkhani, M.; Taylor, A.G. Modern Seed Technology: Seed Coating Delivery Systems for Enhancing Seed and Crop Performance. Agriculture 2020, 10, 526.
- Qiu, Y.; Chen, Z.; Hou, Z.; Song, T.; Mi, L.; Shao, Z. Numerical simulation and experiment on improving pelleted coating of forage grass seeds by vibration force field. Trans. CSAE 2017, 33, 86–93.
- Kangsopa, J.; Hynes, R.K.; Siri, B. Lettuce seeds pelleting: A new bilayer matrix for lettuce (Lactuca sativa) seeds. Seed Sci. Technol. 2018, 46, 521–531.
- Javed, T.; Afzal, I. Impact of seed pelleting on germination potential, seedling growth and storage of tomato seed. Acta Hortic. 2020, 1273, 417–424.
- Amirkhani, M.; Netravali, A.; Huang, W.; Taylor, A.G. Investigation of soy protein–based biostimulant seed coating for broccoli seedling and plant growth enhancement. Hortic. Sci. 2016, 51, 1121–1126.
- Qiu, Y.; Amirkhani, M.; Mayton, H.; Chen, Z.; Taylor, A.G. Biostimulant seed coating treatments to improve cover crop germination and seedling growth. Agronomy 2020, 10, 154.
- Zhao, L.; Nie, L.; Zhu, Q.; Gou, L. Seed coating and its Application in China. Chin. Agric. Sci. Bull. 2009, 25, 126–131.
More
Information
Subjects:
Agronomy
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.9K
Revisions:
2 times
(View History)
Update Date:
23 Feb 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No