 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Sachin Kumar Gupta | + 4465 word(s) | 4465 | 2021-12-28 05:20:30 | | | |
| 2 | Lindsay Dong | Meta information modification | 4465 | 2022-01-21 02:32:32 | | |
Video Upload Options
The technology of Unmanned Aerial Vehicles (UAVs) has tremendous potential to support various successful space mission solutions. In general, different techniques for observing space objects are available, such as telescopes, probes, and flying spacecraft, orbiters, landers, and rovers. However, a detailed analysis has been carried out due to the benefits of UAVs relative to other planetary exploration techniques. A prototype UAV has been successfully simulated to fly on Mars’ surface.
1. Introduction
2. Mars Exploration through Different Methods/Vehicles
2.1. Mars UAVs
Mars, relative to Earth, has a low density; the concept of UAVs that can fly on this planet has gained a lot of interest due to the importance of Mars science [8].
Several studies by NASA, universities, and industry were carried out from the 1980s to the 1990s to identify new Mars atmosphere missions and design various types of Mars UAVs [9]. Article [9] patterned the construction of Mars aircraft, designated as the Argo VII. The Argo VII’s aerodynamic, stability, and control parameters were calculated using analytical and control parameters similar to that of ARES-2. Progress in technical areas, such as propulsion technology, composites, and energy storage systems, has led to more complex Mars UAVs. In article [10], as an affordable means of launching small planetary exploration payloads, the NASA Jet Propulsion Laboratory developed the Micro-Mission concept in 1999. The ASAP of the Ariane 5 launch vehicle was used to launch a spacecraft weighing 200 kg into a geosynchronous transfer orbit. Numerous universities have performed a study on Mars aerial vehicles since 2000, such as the University of Colorado at Boulder and Wichita State University. The MAP project was the subject of researchers from the University of Colorado at Boulder [11]. In article [11], as the design project priority, the MARV team chose to deploy the wings of the MAP. The project for MARV was split into four stages: initial design, deployment system, machining and fabrication of components, and step of integration and checking. The final aim of the project was to plan for the MAP with the wing packaging and wing launch. The outcome was a fully deployable wing with the associated actuator, microprocessor, and supporting applications. The secondary purpose of the deployable wing was to perform wind tunnel testing of the durability of its pitch. For the MAP, a full software architecture design was also built along with all the related electrical components required to incorporate the aerospace. In [12], the research explains the design and development of different autopilot device architectures for unmanned aerial mini/micro rotary-wing vehicles via the model-based design approach.
2.2. Designing Mars UAV
2.3. Previous Major Devastating Failed Missions in Space Exploration
| Reference | Mission | Lander | Orbiter | Rover | Human Crew | Cause of Failure |
|---|---|---|---|---|---|---|
| [21] | MCO | ✕ | ✓ | ✕ | ✕ | Cost constraint. |
| [22] | Chandrayaan-2 | ✓ | ✓ | ✓ | ✕ | 500 m short of the lunar surface, Vikram Lander lost control and crashed with the Pragyan rover. |
| [23][24] | Columbia Space Shuttle | ✕ | ✓ | ✕ | ✓ | Damage in the left-wing. |
| [25] | Viking project | ✓ | ✓ | ✕ | ✕ | Software updates error. |
| [26][27] | DART project | ✕ | ✓ | ✕ | ✕ | Wrong estimation of distance through the computer. |
| [28]. | MPL | ✓ | ✕ | ✕ | ✕ | Faulty transmitter. |
| [28] | NOAH 19 | ✕ | ✓ | ✕ | ✕ | Mechanical malfunctioning. |
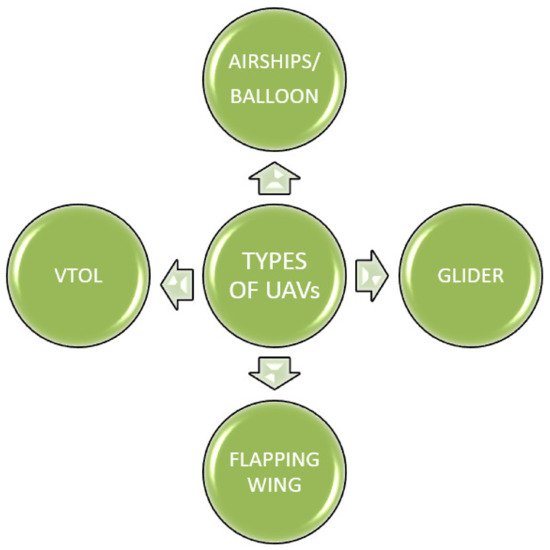
2.4. Different Types of UAVs in Space
3. Simulation
| Parameters | Mars [38] (Reported) |
|---|---|
| Volume (km3) | 16.318 |
| Mass (1024 kg) | 0.64171 |
| Gravity (m/s2) | 3.711 |
| Air pressure (bars) | 6.1 × 104 |
| Air density | 0.020 |
| Speed of sound (m/s) | 240 |
| Atmospheric temperature (Kelvin) | 273 + 15 |
3.1. Environmental Conditions
3.1.1. Air Pressure
- ➢
-
Inertial System: Inertial system is attached to the planetary surface, does not move.
- ➢
-
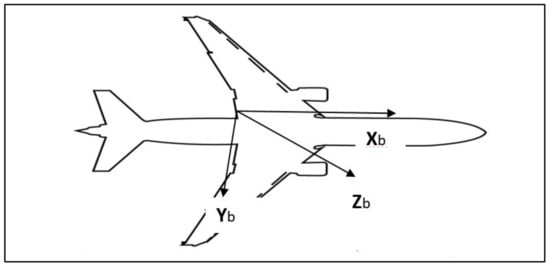
Fixed Body Frame: This frame is attached to the airframe and moves with the UAV.
- ➢
-
Aerodynamic frame: The average velocity of the aircraft’s centre of mass defines this frame. The UAV is also equipped with a dynamic frame.
3.1.2. Gravity
It is evident that for designing a prototype UAV, decreased weight and an increased lift are the two major goals to be achieved. Based on Newton’s theory of universal gravitation, when talking about a spherical body, such as a planet, the gravitational force is directly proportional to the planet’s mass and inversely proportional to the square of the radius of the planetary body. Equations (1) and (2) are based on Newton’s theory of universal gravitation and shows the formula for the gravitational force of Mars [39]. Table 3 shows the notation and parametric values of Equation (1) [40].
g = Gm/r2
g = 3.711 m/s2
-
g is the gravity of the Mars
-
G is the gravitational constant
-
m is the mass of the planet Mars
- r is the radius of the Mars.
| Parameters | Values |
|---|---|
| Gravitational Constant | 6.674 × 10−11m3 kg−1 s−2 |
| Mass of Mars | 6.42 × 1023 kg |
| Radius of Mars | 3.38 × 106 |
3.1.3. Air Density
Air density directly impacts UAVs aerodynamically and in terms of engine performance. Air density affects nearly every aspect of a UAV’s flight. In less dense air, standard measurements, such as take-off distances, rate of climb, landing distance, would all be increased, thus reducing the performance. Atmospheric density, in general, is defined as the mass per unit volume of a planet’s atmosphere.
3.1.4. Air Temperature
3.1.5. Speed of Sound
- ➢
-
Useful in separating the flight regimes into two distinct areas with distinct flow conduct.
- ➢
-
Assists in converting compressible flow geometry to one that can be measured using simpler, incompressible methods.
- ➢
-
Efficient air travel and the maximum practical flight speed will be restricted.
- ➢
-
Provides a hint to the designer about how to drive this boundary higher. For example, the speed of sound at Mars’ surface is 240 m/s2, and [37] this is comparatively lower than the Earth’s (343 m/s2).
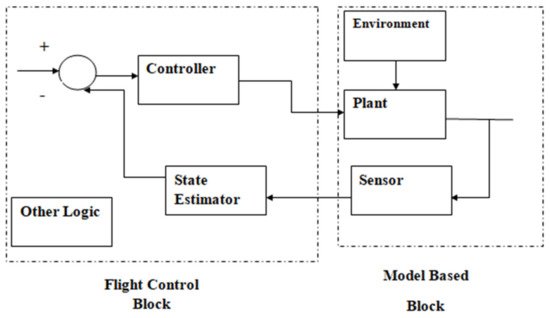
3.2. Sensors Block
3.2.1. Inertial Measurement Unit (IMU)
- ➢
-
Accelerometer: To capture speed and acceleration.
- ➢
-
Gyroscope: A gyroscope is a device that measures spin and spindle speed.
- ➢
-
Magnetometer: Cardinal direction is determined via a magnetometer.
3.2.2. Camera
3.2.3. Ultrasound Sensor
3.2.4. Pressure Sensor
4. Opportunities, Challenges, and Future Scope
- ➢
-
Ample economic power: Today’s space explorations are limited by the individual missions’ mass and life span considerations. Over time, the current power system is exhausted in the spacecraft, so the amount of usable power is reduced as the mission progresses. UAVs will open up the gateway of exploring a spatial body with plenty of economic power.
- ➢
-
Scientific investigation: For the scientific investigation of the planet’s geology or even scouting missions for possible human outposts, a UAV might open up the opportunity by covering large regions of Mars.
- ➢
-
Systematic mapping: UAVs fly independently or via remote control/piloting. Autonomous flights are pre-programmed with computers each time and are suitable for the systematic mapping of landscapes.
- ➢
-
Affordable Space Access: Loading a single pound of mass into low Earth orbit costs around 10,000 USD today. The construction and manufacture of the launch system is a crucial part of this expense. Nearly 40% of the overall cost is attributed to processing from the ground and launch. The use of UAVs for interplanetary missions will allow access to space economically.
References
- Launius, R.D. Frontiers of Space Exploration; Greenwood Publishing Group: Westport, CT, USA, 2004.
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131.
- Sharma, V.; Song, F.; You, I.; Chao, H.-C. Efficient Management and Fast Handovers in Software Defined Wireless Networks Using UAVs. IEEE Netw. 2017, 31, 78–85.
- Kotecha, K.; Garg, D.; Mishra, B.; Narang, P.; Mishra, V.K. Background Invariant Faster Motion Modeling for Drone Action Recognition. Drones 2021, 5, 87.
- Almalki, F.A.; Soufiene, B.O.; Alsamhi, S.H.; Sakli, H. A low-cost platform for environmental smart farming monitoring system based on IoT and UAVs. Sustainability 2021, 13, 5908.
- Gupta, A.; Sundhan, S.; Gupta, S.K.; Alsamhi, S.H.; Rashid, M. Collaboration of UAV and HetNet for better QoS: A comparative study. Int. J. Veh. Inf. Commun. Syst. 2020, 53, 309–333.
- Catling, D.C.; Leovy, C. Mars Atmosphere: History and Surface Interactions. In Encyclopedia of the Solar System; Elsevier: Amsterdam, The Netherlands, 2007; pp. 301–314.
- Guynn, M.; Croom, M.; Smith, S.; Parks, R.; Gelhausen, P. Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission. In Proceedings of the 2nd AIAA “Unmanned Unlimited” Conference and Workshop & Exhibit, San Diego, CA, USA, 15–18 September 2003; p. 6578.
- Williams, M. Available online: https://www.universetoday.com/35796/atmosphere-of-the-planets/ (accessed on 1 December 2020).
- The European Space Agency. Available online: https://www.esa.int/ESA_Multimedia/Images/2018/04/Comparing_the_atmospheres_of_Mars_and_Earth#:~:text=Mars%20is%20about%20half%20the,rich%20in%20nitrogen%20and%20oxygen (accessed on 1 December 2020).
- Titus, T.N.; Colaprete, A. Mars Atmospheric Surface Interactions and the CO2 Cycle. 2005. Available online: https://ui.adsabs.harvard.edu/abs/2005EOSTr..86..462T/abstract (accessed on 5 December 2020).
- Reed, R.D. High-Flying Mini-Sniffer RPV-Mars Bound; NASA Flight Research Center Edwards: Edwards, AL, USA, 1978.
- Pipenberg, B.T.; Keennon, M.; Tyler, J.; Hibbs, B.; Langberg, S.; Balaram, J.; Grip, H.F.; Pempejian, J. Design and Fabrication of the Mars Helicopter Rotor, Airframe, and Landing Gear Systems. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0620.
- Patel, A. Design, Modelling, and Control of a Space UAV for Mars Exploration; Lulea University of Technology: Lulea, Sweden, 2021.
- Johansson, M. Experimental and Computational Evaluation of Capabilities of Predicting Aerodynamic Performance for a Mars Helicopter Rotor; Chalmers University of Technology: Gothenburg, Sweden, 2017.
- Mishra, I.; Kumar, A.; Malhotra, V. Conceptual Design of an Unmanned Aerial Vehicle for Mars Exploration. Eur. J. Eng. Technol. Res. 2021, 6, 111–117.
- DeSouza, C. Conceptual design of an unmanned aerial vehicle for mars exploration (MISCAV). In Proceedings of the 44th Lunar and Planetary Science Conference, Bruxelles, Belgium, 5 August 2013; pp. 1–2.
- Smith, S.; Hahn, A.; Johnson, W.; Kinney, D.; Pollitt, J.; Reuther, J. The design of the Canyon Flyer, an airplane for Mars exploration. In Proceedings of the 38th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2000; p. 514.
- Sharma, V.; Srin ivasan, K.; Chao, H.C.; Hua, K.L.; Cheng, W.H. Intelligent deployment of UAVs in 5G heterogeneous communication environment for improved coverage. J. Netw. Comput. Appl. 2017, 85, 94–105.
- Rumford, T.E. Demonstration of autonomous rendezvous technology (DART) project summary. In Space Systems Technology and Operations; SPIE: Washington, DC, USA, 2003; Volume 5088, pp. 10–19.
- Available online: https://www.popsci.com/military-aviation-amp-space/article/2009-03/gallery-top-10-nasa-probe-failures/ (accessed on 21 February 2021).
- Blackburn, M.; Busser, R.; Nauman, A.; Knickerbocker, R.; Kasuda, R. Mars Polar Lander fault identification using model-based testing. In Proceedings of the 26th Annual NASA Goddard Software Engineering Workshop, Greenbelt, MD, USA, 5–6 December 2002; pp. 128–135.
- Available online: https://en.wikipedia.org/wiki/NOAA-19 (accessed on 21 February 2021).
- Available online: https://mars.nasa.gov/news/1854/the-fact-and-fiction-of-Martian-dust-storms/ (accessed on 24 February 2021).
- Withers, P.; Weiner, S.; Ferreri, N.R. Recovery and validation of Mars ionospheric electron density profiles from Mariner 9. Earth Planets Space 2015, 67, 23403.
- Available online: https://phys.org/news/2016-12-strong-gravity-mars.html#:~:text=On%20top%20that%2C%20the%20gravity,only%2038%20kg%20on%20Mars (accessed on 7 April 2021).
- Available online: https://byjus.com/physics/value-of-g/ (accessed on 7 April 2021).
- Withers, P.; Felici, M.; Mendillo, M.; Moore, L.; Narvaez, C.; Vogt, M.F.; Jakosky, B.M. First ionospheric results from the MAVEN radio occultation science experiment (ROSE). Journal of Geophysical Research: Space Physics 2018, 123, 4171–4180.
- Available online: https://en.wikipedia.org/wiki/Aerobot/ (accessed on 22 January 2021).
- Available online: http://www.gaerospace.com/tag/space-balloons/ (accessed on 22 January 2021).
- Salazar, R.D.; Hassanalian, M.; Abdelkefi, A. Defining a conceptual design for a tilt-rotor micro air vehicle for a well-defined mission. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 0239.
- Michelson, R.C.; Naqvi, M.A. Beyond Biologically Inspired Insect Flight. von Karman Institute for Fluid Dynamics RTO/AVT Lecture Series on Low Reynolds Number Aerodynamics on Aircraft Including Applications in Emergening UAV Technology; von Karman Institute for Fluid Dynamics: Sint-Genesius-Rode, Belgium, 2003; pp. 1–19.
- Available online: https://www.911security.com/learn/airspace-security/drone-fundamentals/types-of-drones-flapping-wing (accessed on 25 January 2021).
- Hassanalian, M.; Abdelkefi, A.; Wei, M.; Ziaei-Rad, S. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: Theory and prototype. Acta Mech. 2016, 228, 1097–1113.
- Oyama, A.; Fujii, K. A Study on Airfoil Design for Future Mars Airplane. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006.
- Barnes, J.W.; Lemke, L.; Foch, R.; McKay, C.P.; Beyer, R.A.; Radebaugh, J.; Atkinson, D.H.; Lorenz, R.; Le Mouélic, S.; Rodriguez, S.; et al. AVIATR—Aerial Vehicle for In-situ and Airborne Titan Reconnaissance. Exp. Astron. 2011, 33, 55–127.
- Available online: https://en.wikipedia.org/wiki/Atmosphere_of_Mars#:~:text=It%20also%20contains%20trace%20levels,1%25%20of%20the%20Earth’s%20value (accessed on 7 April 2021).
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Convergence of Machine Learning and Robotics Communication in Collaborative Assembly: Mobility, Connectivity and Future Perspectives. J. Intell. Robot. Syst. 2019, 98, 541–566.
- Available online: https://mars.nasa.gov/mars2020/participate/sounds/#:~:text=With%20an%20average%20surface%20temperature,meters%20per%20second)%20on%20Earth (accessed on 8 April 2021).
- Available online: https://www.sciencemag.org/news/2020/11/Martian-dust-storms-parch-planet-driving-water-space#:~:text (accessed on 24 February 2021).

