 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Thomas Michael Wendt | + 2322 word(s) | 2322 | 2021-10-26 05:40:22 | | | |
| 2 | Amina Yu | + 8 word(s) | 2330 | 2021-11-05 04:37:18 | | |
Video Upload Options
Energy harvesting is the utilisation of ambient energy in order to power electronics such as wireless sensor nodes (WSN) or wearables without the need of batteries. This allows to operate the node over a much longer time period compared to battery-powered devices along with lower maintenance efforts. Furthermore, the low-maintenance requirements allow to operate these WSNs in environments with limited or no accessibility.
1. Introduction
Energy harvesting is the utilisation of ambient energy in order to power electronics such as wireless sensor nodes (WSN) or wearables without the need of batteries [1][2][3]. This allows to operate the node over a much longer time period compared to battery-powered devices along with lower maintenance efforts. Furthermore, the low-maintenance requirements allow to operate these WSNs in environments with limited or no accessibility [4][5]. Energy harvesting can be categorised into four types of energy sources: solar/light, mechanical motion/vibration, thermoelectricity and electromagnetic radiation. Each type of energy source has different concepts to convert the ambient energy into electrical energy [1]. Testing different energy harvesters often requires specific power conditioning depending on the type of harvester. In [6], a reconfigurable power management was presented, allowing fast adaptation of the power management.
Solar energy is converted into electrical energy via solar panels [4][5]. Compared to outdoor applications the indoor available energy is 10 to 100 times lower [7]. The light’s spectral composition and the applied photovoltaic cell significantly impact the generated power, even if the same illuminance level is given [8]. Thermoelectric generators (TEG) utilise the Seebeck-effect to convert thermal into electrical energy [9]. The TEG’s hot side is mounted on a heat source and the cold side on a heat sink. A temperature gradient between both sides creates an electric voltage [1][10]. RF harvesting utilises electromagnetic (EM) radiation in the near- or far-field [11]. Near-field sources apply EM induction or resonance methods for power transfer. For example, a sensor powered via near field communication (NFC) by a smart phone was presented in [12]. However, near-field harvesting might limit scaling for WSNs distributed over a wide area [11]. Far-field sources (range up to few kilometres) are for instance cellular base stations, TV stations or WiFi access points [1]. The available energy in the far field depends on the harvesting device’s location and surroundings. Kinetic harvesters convert motions or vibrations into electrical energy via electromagnetic [13][14][15], electrostatic [16][17][18][19][20] or piezoelectric [21][22][23] transduction methods [1]. Electromagnetic (EM) harvesters consist of magnets and coils. Based on Faraday’s law, a varying magnetic flux induces an electric voltage across the coil [2]. The induced voltage depends on the number of the coil’s turns as well as the size of coil and magnet. Thus, achieving small harvesters with a high power output is tough [19]. Applications with high amplitudes and low frequencies are suitable for EM harvester [24]. Piezoelectric harvesters utilise the piezoelectric effect to transduce mechanical into electrical energy when stress is applied on the geometry [2]. Electrostatic harvester exploit the ambient motion (for instance vibrations) to vary the distance of charged capacitor plates, resulting in a changing capacitance and thus energy transfer [2]. Ambient mechanical energy occurs in different forms such as rotation or vibration. Therefore, various harvester designs and techniques for these forms exist. Three-dimensional printed EM harvesters utilising rotation are presented in [25][26][27][28][29][30]. Three-dimensional printed EM vibration harvesters are reviewed in this paper. Furthermore, a recent review on various techniques for mechanical energy harvesting was provided in [31].
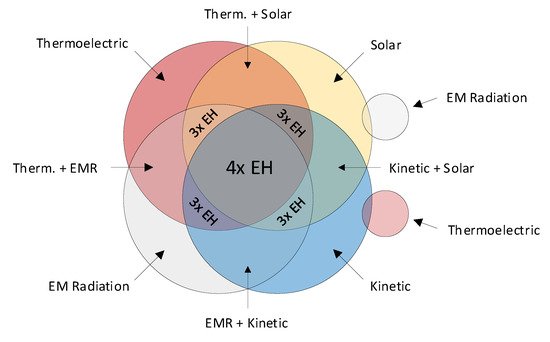
To achieve a higher energy output, different techniques or sources may be combined in hybrid harvesters [1]. Figure 1 shows the energy sources and their combinations. Combining multiple sources achieves multiple opportunities for energy harvesting (EH).
2. 3D Printed Non-Hybrid Vibration Harvester
This section presents non-hybrid harvesters categorised by their shape.
In [32], tube harvesters with 2 degrees of freedom (2-DOF) were investigated. The authors combined springs as linear and magnets as non-linear oscillators in four configurations to realise a 2-DOF harvester. The structure consisted of an outer tube containing an inner tube. The inner tube had a magnet (10 mm diameter and 10 mm thickness) inside. The magnet was either supported with springs or magnets. The inner tube itself was supported either with springs or magnets, resulting in four possible combinations. The tubes were printed via UV curable resin and had a coil (170 turns) wound around. All magnets were made of NdFeB. The authors pointed out that differences in their results between simulation and experiment might come due to intermittent sliding contact between magnet and tube because of the tube’s deviation from vertical direction or from assembly. Configuration C with magnetic springs for the outer tube and linear springs for the magnet inside the inner tube was reported with a power output of 5.9 mW at 0.5 g. Configuration A with two linear springs showed 6.1 mW at 0.5 g.
In [33], a tube-like harvester with magnetic springs was proposed. Two NdFeB N35 magnets were attached to both ends of the printed hollow tube with a coil (480 turns) wrapped around the middle of tube. A stack consisting of two magnets was able to move inside the tube. The available length for the stack’s movement as well as the stack’s mass were adjustable and therefore allowed to tune the resonance frequency. For the stack, the magnets were orientated with opposite poles facing each other which was shown to provide a higher magnetic flux. The authors investigated combinations of lengths (140 mm or 200 mm) and magnet stacks consisting of either three or six magnets under different conditions. The harvester was attached to the leg of a participant either vertically or transversely while exposed to different walking speeds. The maximum power output of 10.66 mW was under running conditions with the combination of 200 mm length and a six magnets-stack. The authors mentioned the higher mass of the stack shifted the resonance frequency more towards the human motion frequency.
Table 2 summarises the non-hybrid harvesters for later discussion.
| Ref. | Year | Structure | Power | Energy Source | Special Feature |
|---|---|---|---|---|---|
| in mW | |||||
| [34] | 2021 | Cantilever | 3.34 × 10−3 |
| Low frequency vibrations | MEMS harvester | ||||
| [35] | 2020 | Straight tube | 1.4 | Low frequency vibrations | Self-powered accelerometer |
| [36] | 2020 | Pendulum | 10 | Mechanical vibrations (shaker) | Oscillations and rotations possible |
| [37] | 2020 | Cubic tube | 2.37 × 10−2 |
| Mechanical vibrations | Total volume less than 1 cm3 | ||||
| [38] | 2020 | Cantilever | 6.46 | Shaker | Optimised coil windings |
| [39] | 2019 | Straight tube (1) | 6 × 10−2 |
| Environment with low | Ferrofluid as lubricant | ||||
| frequency + high amplitude | |||||
| [40] | 2019 | Cycloid tube | 8.8 | Human motion wrist or foot | Optimised shape of harvester |
| [32] | 2019 | Straight tube | 6.1 | Shaker | 2-DOF harvester |
| [41] | 2019 | Manipulator type | 1.28(23.4 Hz) (p) | Shaker | 3-DOF harvester with leaf |
| 0.89(29.2 Hz) (p) | hinge joints | ||||
| 1.32(34.8 Hz) (p) | |||||
| [42] | 2019 | Pendulum | - | Wrist movement | Inkjet printed harvester |
| [43] | 2018 | Straight tube | 63.9 | Human hand shaking | Coils all over surface |
| [33] | 2017 | Straight tube | 10.66 | Human leg motion | Magnetic spring |
| [44] | 2017 | Straight tube | 7 (p) | Shaker | Oblique springs for alignment |
| [45] | 2016 | LITF pivot | 2.9 (ds)(p) | Mechanical vibrations | Topology restricts out of plane |
| movement | |||||
| [24] | 2016 | Straight tube | 76 | Human motion (walking) | Printed spring |
| [46] | 2009 | 3D spring | 1.7 | Vibrations from flying moth | Harvesting energy from moth |
| [47] | 2008 | Spherical | 1.44 | Random human motion | Multi-direction harvesting |
| [48] | 2008 | Moving arm | 26 | Ambient mechanical vibration | Repelling magnets as oscillator |
(1)final prototype not 3D printed (ds)down sweeps values (p)peak power
3. 3D Printed Hybrid Vibration Harvester
Hybrid harvester combine multiple energy sources and/or harvesting principles, for instance solar and kinetic sources or piezo and electromagnetic transducers. Figure 1 shows possible combinations of energy sources.
In [49], a 3D printed tube contained a magnet attached to a spring, an electromagnetic generator (EMG), a contact separation mode triboelectric nanogenerator (CTENG) and a sliding mode triboelectric nanogenerator (STENG). An aluminium (Al) strip was wrapped around the magnet for the STENG. Two coils were mounted around and the STENG’s electrodes inside the tube. The CTENG was located in the bottom. As explained by the authors, once the magnet started oscillating a voltage was induced in the coil by Faraday’s law, a triboelectric charge transfer was induced in the STENG and the CTENG was compressed in the magnets lowest position. The maximum peak power outputs were 717 mW at 600 Ω for the EMG, 18.9 mW at 2 M Ω for the CTENG and 1.7 mW at 6 M Ω for the STENG. The device’s regulated DC power output was 34.11 mW.
In [50], a non resonant impact based harvester with a similar structure as in [49] was presented. A magnet with two springs on its top and bottom was inside a printed rectangular tube with a coil mounted in the centre as EMG. Two CTENGs were integrated with their positive and negative triboelectric material on the open ends of the springs as well as the tube’s bottom and ceiling, respectively. The magnet started oscillating once the device was under excitation. According to the paper a soft magnetic film was utilised as flux-concentrator for the EMG on the coil’s outside. This increased the induced voltage in the coil by 1.39 times. Furthermore a dry lubricant was applied to the coils frame for easier magnet-movement. The harvester’s power output was 144.1 mW with a load of 1.5 k Ω at 6 Hz and 1 g.
In [51], a non-resonant hybrid EMG-TENG harvester for ultralow frequencies was proposed. The harvester had a printed cylindrical shell (white resin) with a vertical pendulum inside. The pendulum was similar to a metronome but flexible into all directions. The pendulum’s shaft consisted of a spring with a printed, hollow rod around to increase its stiffness. The shaft was fixed to the shell at the bottom and on the top end a magnet (Ø 22 mm × 20 mm) was attached. Above the magnet a coil was attached onto the shell’s ceiling and four TENGs were attached to the inner walls of the cylindrical shell. The TENGs were designed with a double helix structure made of copper-foil and FEP-film. When exposed to external excitation the pendulum with the magnet started swinging around, inducing a voltage into the coil due to Faraday’s law of induction. When the magnet collided with the TENG’s the layers were pressed together, achieving temporary contact, thus resulting in triboelectrification. At 2.2 Hz, the peak power output for the EMG was 523 mw at 280 Ω and for the TENG 470 µW at 0.5 M Ω . A wireless temperature sensor was driven by the harvester and a LTC3106 as power management.
4. Considerable Fields of Investigation for Future Vibration Harvesters
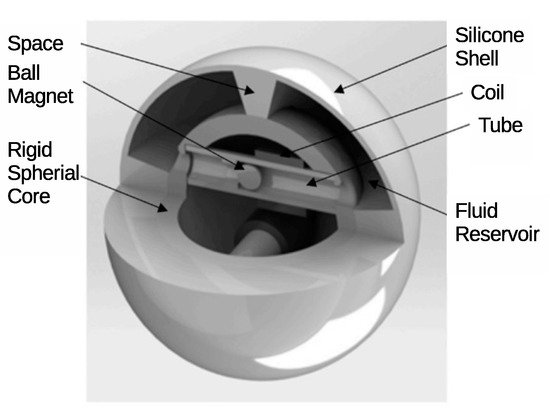
In [52], a spherical multi-direction harvester with a moulded silicone-shell was presented. The devices core was printed with PLA with guiding tubes for two integrated magnet balls. Coils were mounted around the tubes. Figure 2 shows the harvester’s internal structure. The authors applied a compressible silicone-shell. Under compression, the shell actuated olive oil, which then forced the magnet balls to move, thus passing a coil and inducing a voltage. Once the deformation of the shell was gone, the fluid flowed back into its original location and pushed the balls into the opposite direction through the coil. This combination of shell and fluid allowed the multi-directional actuation. Olive oil was applied due to its high viscosity to move the balls. A less viscous fluid such as water would flow around the balls without moving them. The harvester was tested under frequencies of 4–15 Hz and achieved between 17 and 44 mV.
In [53], a rectangular piece of magnetostrictive material (2826 MB) was embedded inside an FFF printed bone, made of PLA. Around the bone a collector coil (4000 turns, 0.385 mm wire diameter) was attached along with a bias NdFeB magnet (150 × 20 × 10 mm 3). The external magnet was necessary to provide a working magnetic field. Applied axial stress applied to the bone caused a compression of the magnetostrictive material and therefore a change of its permeability due to the Villari effect. Thus, the magnetic flux density changed and induced a voltage in the coil according to Faraday’s law. Various human walking-conditions were simulated for testing. The maximum harvested power was 0.1 mW during simulated quick running.
In [54], a rotational harvester with a 3D printed magnet was proposed for energy harvesting from power transmission lines. The NdFeB-magnet was made of compound material Neofer 25/60p. It was printed via FFF on a low-cost 3D printer. The magnet was mounted on a shaft with two bearings, which were fixed in a frame. A coil (750 turns) was wound around the frame. Two devices were built and tested in a two axis Helmholtz coil platform. A DC bias magnetic field was required for centring the magnet in its equilibrium position. An AC magnetic field then induced a rotary movement of the magnet. One device’s magnet has been topologically optimised in order to achieve a more homogeneous radial magnetic field. The optimised magnet was recessed on two sides of its cylindrical shape. As a consequence, the distortion power factor of the optimised harvester increased by 55%. However, the power output decreased by 25% due to the lower magnet volume. At resonance, a power output of 93 mW with a 10 Ω load was achieved. The applied DC magnetic field had an impact on the device’s resonance frequency. Applications mentioned were wireless sensor networks and IoT.
An interesting approach was presented in [55], where micro-organisms (phytoplankton and zooplankton) were utilised to power 3D printed actuation mechanisms. The movement of the micro-organisms was controlled by geometric forms as well as external stimuli. Phototaxis as one kind of stimulus caused micro-organisms to move towards (positive) or away from (negative) a light source. A linear movement was been achieved with a printed float with a fin beneath and matured Artemia sallina. The fin separated a channel with blue LEDs on both ends. If the LED was turned on, the negative phototaxis organisms escaped from it. They collided with the fin and pushed it to the opposite direction. With 50 Artemia, an average speed of 0.21 mm/s and a driving force of 0.537 mN were observed. This equalled 0.11 mW per organism. For practical application, a higher number of Artemia would be necessary. A rotary movement of 0.4 rpm was achieved with a printed ratchet and 300 Artemia in their larva-stage (positive phototaxis). The ratchet was printed on KEYENCE AGILISTA-3100 (inkjet) and AR-M2 (UV cureable resin) as material. A mask was applied to cause positive phototaxis movement around the ratchet. A ratchet made by photolithography was also tested with another organism (Volvox). Two ratchet-designs were tested and obtained—0.86 rpm and 2.01 rpm. A conversion from the kinetic into the electric domain has not been implemented.
References
- Ku, M.L.; Li, W.; Chen, Y.; Ray Liu, K.J. Advances in Energy Harvesting Communications: Past, Present, and Future Challenges. IEEE Commun. Surv. Tutor. 2016, 18, 1384–1412.
- Elvin, N.; Erturk, A. Advances in Energy Harvesting Methods; Springer: New York, NY, USA, 2013.
- Tang, L.; Yang, Y.; Soh, C.K. Toward Broadband Vibration-based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2010, 21, 1867–1897.
- Chien, L.J.; Drieberg, M.; Sebastian, P.; Hiung, L.H. A simple solar energy harvester for wireless sensor networks. In Proceedings of the 2016 6th International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 1–6.
- Senivasan, S.; Drieberg, M.; Singh, B.S.M.; Sebastian, P.; Hiung, L.H. An MPPT micro solar energy harvester for wireless sensor networks. In Proceedings of the 2017 IEEE 13th International Colloquium on Signal Processing Its Applications (CSPA), Penang, Malaysia, 10–12 March 2017.
- Kokert, J.; Beckedahl, T.; Reindl, L.M. Medlay: A Reconfigurable Micro-Power Management to Investigate Self-Powered Systems. Sensors 2018, 18, 259.
- Pubill, D.; Serra, J.; Verikoukis, C. Harvesting artificial light indoors to power perpetually a Wireless Sensor Network node. In Proceedings of the 2018 IEEE 23rd International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Barcelona, Spain, 17–19 September 2018; pp. 1–6.
- Ma, X.; Bader, S.; Oelmann, B. Characterization of Indoor Light Conditions by Light Source Classification. IEEE Sens. J. 2017, 17, 3884–3891.
- Verma, G.; Sharma, V. A Novel Thermoelectric energy harvester for Wireless Sensor Network Application. IEEE Trans. Ind. Electron. 2019, 66, 3530–3538.
- Moser, A.; Erd, M.; Kostic, M.; Cobry, K.; Kroener, M.; Woias, P. Thermoelectric Energy Harvesting from Transient Ambient Temperature Gradients. J. Electron. Mater. 2012, 41, 1653–1661.
- Yedavalli, P.S.; Riihonen, T.; Wang, X.; Rabaey, J.M. Far-Field RF Wireless Power Transfer with Blind Adaptive Beamforming for Internet of Things Devices. IEEE Access 2017, 5, 1743–1752.
- Boada, M.; Lazaro, A.; Villarino, R.; Gil, E.; Girbau, D. Near-Field Soil Moisture Sensor with Energy Harvesting Capability. In Proceedings of the 2018 48th European Microwave Conference (EuMC), Madrid, Spain, 23–27 September 2018; pp. 235–238.
- Liu, H.; Hou, C.; Lin, J.; Li, Y.; Shi, Q.; Chen, T.; Sun, L.; Lee, C. A non-resonant rotational electromagnetic energy harvester for low-frequency and irregular human motion. Appl. Phys. Lett. 2018, 113, 203901.
- Tan, Y.; Dong, Y.; Wang, X. Review of MEMS Electromagnetic Vibration Energy Harvester. J. Microelectromechanical Syst. 2017, 26, 1–16.
- Wang, L.; Todaria, P.; Pandey, A.; O’Connor, J.; Chernow, B.; Zuo, L. An Electromagnetic Speed Bump Energy Harvester and Its Interactions With Vehicles. IEEE/ASME Trans. Mechatronics 2016, 21, 1985–1994.
- Pourshaban, E.; Karkhanis, M.U.; Deshpande, A.; Banerjee, A.; Ghosh, C.; Kim, H.; Mastrangelo, C.H. Flexible Electrostatic Energy Harvester Driven by Cyclic Eye Tear Wetting and Dewetting. In Proceedings of the 2021 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), virtually, 20–23 June 2021; pp. 1–4.
- Qian, Y.; Yu, J.; Zhang, F.; Kang, Y.; Su, C.; Pang, H. Facile synthesis of sub-10 nm ZnS/ZnO nanoflakes for high-performance flexible triboelectric nanogenerators. Nano Energy 2021, 88, 106256.
- Qian, Y.; Lyu, Z.; Kim, D.H.; Kang, D.J. Enhancing the output power density of polydimethylsiloxane-based flexible triboelectric nanogenerators with ultrathin nickel telluride nanobelts as a co-triboelectric layer. Nano Energy 2021, 90, 106536.
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro electrostatic energy harvester with both broad bandwidth and high normalized power density. Appl. Energy 2018, 212, 362–371.
- Aljadiri, R.T.; Taha, L.Y.; Ivey, P. Electrostatic Energy Harvesting Systems: A Better Understanding of Their Sustainability. J. Clean Energy Technol. 2017, 5, 409–416.
- Yuan, X.; Gao, X.; Yang, J.; Shen, X.; Li, Z.; You, S.; Wang, Z.; Dong, S. The large piezoelectricity and high power density of a 3D-printed multilayer copolymer in a rugby ball-structured mechanical energy harvester. Energy Environ. Sci. 2020, 13, 152–161.
- Thakare, N.S.; Thakare, S.S.; Shahakar, R.S. Recent Advancement and Comparative Performance Analysis of Energy Harvesting Technique. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 1631–1634.
- Zhao, J.; You, Z. A shoe-embedded piezoelectric energy harvester for wearable sensors. Sensors 2014, 14, 12497–12510.
- Garcia-Moreno, P.; Perez, M.E.; Estevez, F.J.; Gloesekoetter, P. Study of Wearable and 3D-Printable Vibration-Based Energy Harvesters. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 101–108.
- Herawan, S.G.; Syahputra, S.A.; Tokit, E.M.; Sa’at, F.A.Z.M.; Rosli, M.A.M. Effect of number of permanent magnetic poles on 3D printed coreless generator rotor. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1082, 012009.
- Herawan, S.G.; Syahputra, S.A.; Tokit, E.M.; Sa’at, F.A.Z.M.; Rosli, M.A.M. Energy harvesting applications using 3D-printed coreless generator. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1082, 012004.
- Soemphol, C.; Angkawisittpan, N. 3D-printed materials based low-speed permanent magnet generator for energy harvesting applications. Mater. Today Proc. 2020, 22, 180–184.
- Adamski, K.T.; Adamski, J.W.; Urbaniak, L.; Dziuban, J.A.; Walczak, R.D. 3D Printed Miniature Water Turbine with Integrated Discrete Electronic Elements for Energy Harvesting and Water Flow Measurement. J. Phys. Conf. Ser. 2018, 1052, 012086.
- Lee, J.; Jeon, G.; Kim, S. Magnetically axial-coupled propeller-based portable electromangetic energy-harvesting device using air and water stream. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 23–27 April 2018; p. 1.
- Han, N.; Zhao, D.; Schluter, J.U.; Goh, E.S.; Zhao, H.; Jin, X. Performance evaluation of 3D printed miniature electromagnetic energy harvesters driven by air flow. Appl. Energy 2016, 178, 672–680.
- Maamer, B.; Boughamoura, A.; Fath El-Bab, A.M.; Francis, L.A.; Tounsi, F. A review on design improvements and techniques for mechanical energy harvesting using piezoelectric and electromagnetic schemes. Energy Convers. Manag. 2019, 199, 111973.
- Fan, K.; Liang, G.; Zhang, Y.; Tan, Q. Hybridizing linear and nonlinear couplings for constructing two–degree–of–freedom electromagnetic energy harvesters. Int. J. Energy Res. 2019, 5, 041306.
- Wang, W.; Cao, J.; Zhang, N.; Lin, J.; Liao, W.H. Magnetic-spring based energy harvesting from human motions: Design, modeling and experiments. Energy Convers. Manag. 2017, 132, 189–197.
- Han, D.; Shinshi, T.; Kine, M. Energy Scavenging From Low Frequency Vibrations Through a Multi-Pole Thin Magnet and a High-Aspect-Ratio Array Coil. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 8, 139–150.
- Beato-López, J.J.; Royo-Silvestre, I.; Algueta-Miguel, J.M.; Gómez-Polo, C. A Combination of a Vibrational Electromagnetic Energy Harvester and a Giant Magnetoimpedance (GMI) Sensor. Sensors 2020, 20, 1873.
- Ambrożkiewicz, B.; Litak, G.; Wolszczak, P. Modelling of Electromagnetic Energy Harvester with Rotational Pendulum Using Mechanical Vibrations to Scavenge Electrical Energy. Appl. Sci. 2020, 10, 671.
- Kawa, B.; Śliwa, K.; Lee, V.C.; Shi, Q.; Walczak, R. Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester. Energies 2020, 13, 2800.
- Kulik, M.; Jagieła, M.; Łukaniszyn, M. Surrogacy-Based Maximization of Output Power of a Low-Voltage Vibration Energy Harvesting Device. Appl. Sci. 2020, 10, 2484.
- POROBIC, I.; GONTEAN, A. Electromagnetic energy harvester. In Proceedings of the 2019 IEEE 25th International Symposium for Design and Technology in Electronic Packaging (SIITME), Cluj-Napoca, Romania, 23–26 October 2019; pp. 151–154.
- Maharjan, P.; Bhatta, T.; Salauddin Rasel, M.; Salauddin, M.; Toyabur Rahman, M.; Park, J.Y. High-performance cycloid inspired wearable electromagnetic energy harvester for scavenging human motion energy. Appl. Energy 2019, 256, 113987.
- Kim, H.S.; Ryu, W.; Park, S.b.; Choi, Y.J. 3-Degree-of-freedom electromagnetic vibration energy harvester with serially connected leaf hinge joints. J. Intell. Mater. Syst. Struct. 2019, 30, 308–322.
- Adamski, K.; Walczak, R. Pendulum base 3D printed electromagnetic energy harvester. J. Phys. Conf. Ser. 2019, 1407, 012114.
- Zhao, X.; Cai, J.; Guo, Y.; Li, C.; Wang, J.; Zheng, H. Modeling and experimental investigation of an AA-sized electromagnetic generator for harvesting energy from human motion: ACCEPTED MANUSCRIPT. Smart Mater. Struct. 2018, 27, 085008.
- Nammari, A.; Caskey, L.; Negrete, J.; Bardaweel, H. Design and investigation of an enhanced magneto-mechanical nonlinear energy harvester. In Active and Passive Smart Structures and Integrated Systems 2017; Park, G., Ed.; SPIE: Bellingham, WA, USA, 2017; p. 101642K.
- Constantinou, P.; Roy, S. A 3D printed electromagnetic nonlinear vibration energy harvester. Smart Mater. Struct. 2016, 25, 095053.
- Chan, S.C.; Yaul, F.M.; Dominguez-Garcia, A.; O’Sullivan, F.; Otten, D.M.; Lang, J.H. Harvesting energy from moth vibrations during flight. In Proceedings of the PowerMEMS 2009, Washington, DC, USA, 1–4 December 2009; pp. 57–60.
- Bowers, B.J.; Arnold, D. Spherical Magnetic Generators for Bio-Motional Energy Harvesting. In Proceedings of the PowerMEMS 2008, Sendai, Japan, 9–12 November 2008; pp. 281–284.
- Hadas, Z.; Zouhar, J.; Singule, V.; Ondrusek, C. Design of Energy Harvesting Generator Base on Rapid Prototyping Parts. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, Poznań, Poland, 1–3 September 2008; pp. 1665–1669.
- Maharjan, P.; Bhatta, T.; Cho, H.; Hui, X.; Park, C.; Yoon, S.; Salauddin, M.; Rahman, M.T.; Rana, S.S.; Park, J.Y. A Fully Functional Universal Self–Chargeable Power Module for Portable/Wearable Electronics and Self–Powered IoT Applications. Adv. Energy Mater. 2020, 10, 2002782.
- Rahman, M.T.; Rana, S.S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Park, J.Y. Biomechanical Energy–Driven Hybridized Generator as a Universal Portable Power Source for Smart/Wearable Electronics. Adv. Energy Mater. 2020, 10, 1903663.
- Xie, W.; Gao, L.; Wu, L.; Chen, X.; Wang, F.; Tong, D.; Zhang, J.; Lan, J.; He, X.; Mu, X.; et al. A Nonresonant Hybridized Electromagnetic-Triboelectric Nanogenerator for Irregular and Ultralow Frequency Blue Energy Harvesting. Research 2021, 2021, 5963293.
- Hall, R.G.; Rashidi, R. Multi-Directional Universal Energy Harvesting Ball. Micromachines 2021, 12, 457.
- Tan, Y.; Zhang, Y.; Ren, L. Energy Harvesting From an Artificial Bone. IEEE Access 2019, 7, 120065–120075.
- Wang, Z.; Huber, C.; Hu, J.; He, J.; Suess, D.; Wang, S.X. An electrodynamic energy harvester with a 3D printed magnet and optimized topology. Appl. Phys. Lett. 2019, 114, 013902.
- Hatsuzawa, T.; Yanagida, Y.; Nisisako, T. Microorganisms driven micro actuation mechanisms for the kinetic energy harvesting. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 2067–2070.

