 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | OLAYODE ISAAC OYEYEMI | + 2636 word(s) | 2636 | 2021-09-29 10:39:03 | | | |
| 2 | Vicky Zhou | Meta information modification | 2636 | 2021-10-08 05:12:07 | | | | |
| 3 | Hasanburak Yucel | + 257 word(s) | 2893 | 2025-06-23 10:55:11 | | |
Video Upload Options
The accurate and effective prediction of the traffic flow of vehicles plays a significant role in the construction and planning of signalized road intersections. The application of artificially intelligent predictive models in the prediction of the performance of traffic flow has yielded positive results. However, much uncertainty still exists in the determination of which artificial intelligence methods effectively resolve traffic congestion issues, especially from the perspective of the traffic flow of vehicles at a four-way signalized road intersection.
1. Introduction
2. Related Studies
-
Traditional statistical techniques.
-
Traditional machine learning techniques.
-
Deep learning methods.
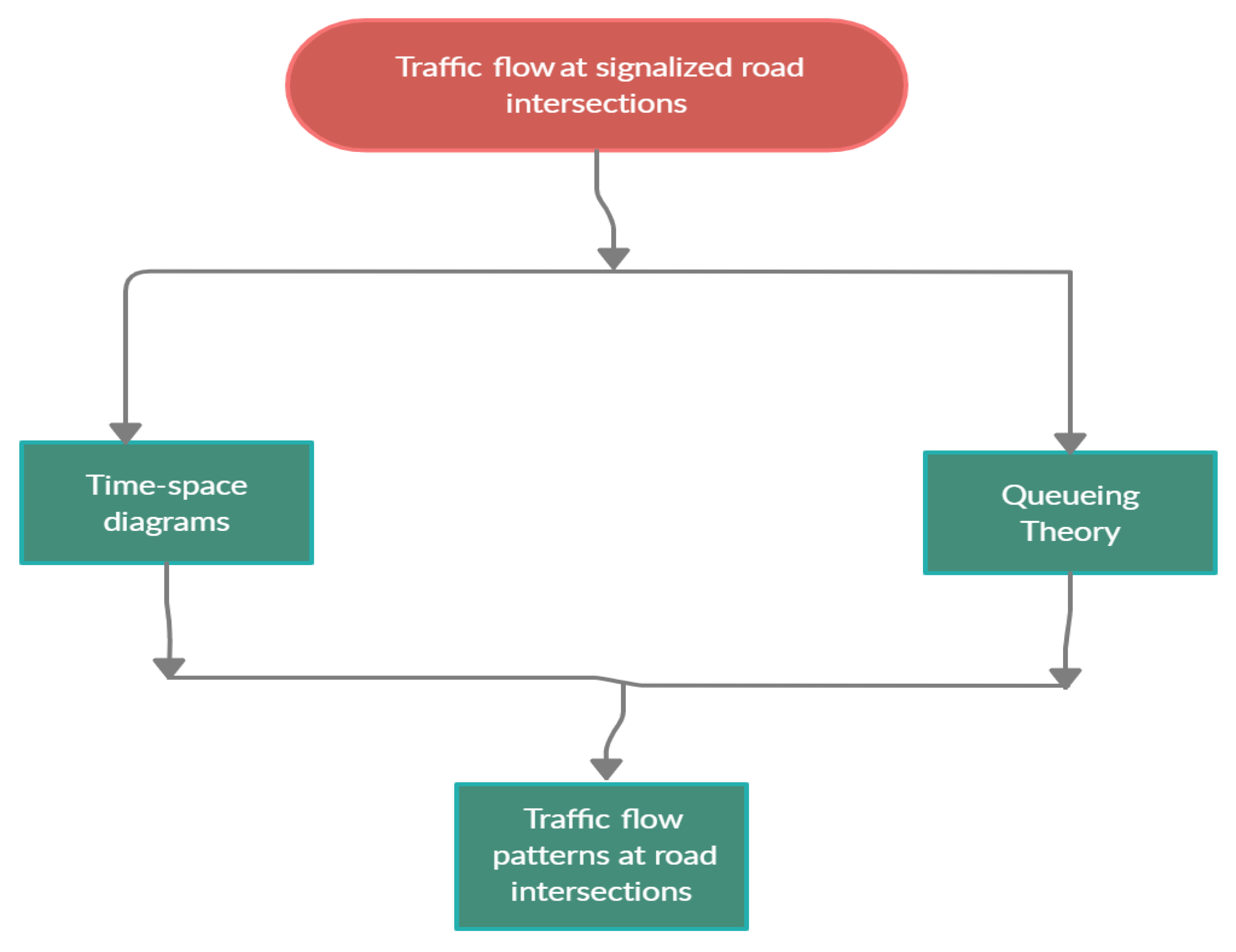
Traffic Flow Patterns at a Signalized Road Intersection
-
Assumption 1
-
Assumption 2
-
Assumption 3
-
Assumption 4
-
Assumption 5
-
Assumption 6
-
Assumption 7
-
Assumption 8
-
This is called the “traffic shockwaves” of the queues of vehicles forming at a road intersection when the traffic lights turn red.
-
This is a traffic shockwave of vehicles when the traffic lights turn green.
-
This is a traffic control delay for each vehicle at the intersection. This is the arrival time when vehicles arrive at a road intersection and when they leave the intersection.
-
This is when two vehicles depart at the same time from the road intersection. It is called “saturation headway”.
-
This is the speed of the vehicles as they arrived at and departed from the road intersection.
-
This is called the time gap. It usually occurs between the departing vehicle and the arriving vehicle.
-
Assumption 9
-
The driver stopped because the traffic light was red.
-
This is the driver driving through the intersection when the traffic light is green.
-
This is the driver driving through the intersection when the queue is cleared and no vehicles are waiting at the road intersection.
-
This is the driver reducing their speed because the traffic light has turned green.
3. The Relevance of AI-Driven Prediction Models for Urban Mobility Systems
The incorporation of AI-based prediction models into urban traffic management is no longer a theoretical possibility but an operational necessity. As cities grow increasingly dense and complex, the need for adaptive and scalable solutions becomes evident. Artificial Intelligence, particularly when applied through hybrid models such as Artificial Neural Network–Particle Swarm Optimization (ANN–PSO), offers a promising alternative to traditional traffic prediction frameworks that struggle with nonlinearities and multi-dimensional data streams.
What sets AI-driven approaches apart is their ability to dynamically learn and refine predictive accuracy in real time. This is especially crucial for signalized intersections, where vehicle arrivals, signal phases, and congestion patterns fluctuate rapidly and unpredictably. The flexibility of machine learning models enables them to process high-volume traffic sensor data, integrate historical and real-time inputs, and identify hidden spatiotemporal patterns that may elude rule-based models. When appropriately calibrated, these models can significantly reduce signal delays, optimize green-time distribution, and improve overall intersection throughput.
Furthermore, the ongoing development of edge computing and Internet of Things (IoT) devices enhances the applicability of these intelligent systems. AI models can now be embedded in localized control systems, allowing immediate feedback loops and decentralized decision-making processes—an essential advancement for next-generation smart cities.
Therefore, the deployment of AI-powered prediction tools at signalized intersections aligns not only with sustainability goals but also with broader urban efficiency frameworks. Such models contribute to reducing fuel consumption, minimizing emissions, and enhancing commuter experience, reinforcing the integral role of intelligent systems in future mobility planning.
References
- Jabbarpour, M.R.; Zarrabi, H.; Khokhar, R.H.; Shamshirband, S.; Choo, K.-K.R. Applications of computational intelligence in vehicle traffic congestion problem: A survey. Soft Comput. 2018, 22, 2299–2320.
- Hamed, M.M.; Al-Masaeid, H.R.; Said, Z.M.B. Short-term prediction of traffic volume in urban arterials. J. Transp. Eng. 1995, 121, 249–254.
- Karlaftis, M.G.; Vlahogianni, E.I. Statistical methods versus neural networks in transportation research: Differences, similarities and some insights. Transp. Res. Part C Emerg. Technol. 2011, 19, 387–399.
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222.
- Zivot, E.; Wang, J. Vector autoregressive models for multivariate time series. Modeling Financ. Time Ser. S-Plus 2006, 385–429.
- Huang, M.-L. Intersection traffic flow forecasting based on ν-GSVR with a new hybrid evolutionary algorithm. Neurocomputing 2015, 147, 343–349.
- Westgate, B.S.; Woodard, D.B.; Matteson, D.S.; Henderson, S.G. Travel time estimation for ambulances using Bayesian data augmentation. Ann. Appl. Stat. 2013, 7, 1139–1161.
- Davis, G.A.; Nihan, N.L. Nonparametric regression and short-term freeway traffic forecasting. J. Transp. Eng. 1991, 117, 178–188.
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional neural networks on graphs with fast localized spectral filtering. Adv. Neural Inf. Process. Syst. 2016, 29, 3844–3852.
- D’Andrea, E.; Marcelloni, F. Detection of traffic congestion and incidents from GPS trace analysis. Expert Syst. Appl. 2017, 73, 43–56.
- Gidófalvi, G. Scalable selective traffic congestion notification. In Proceedings of the Fourth ACM SIGSPATIAL International Workshop on Mobile Geographic Information Systems, Bellevue, WA, USA, 3 November 2015; pp. 40–49.
- Anwar, T.; Vu, H.L.; Liu, C.; Hoogendoorn, S.P. Temporal tracking of congested partitions in dynamic urban road networks. Transp. Res. Rec. 2016, 2595, 88–97.
- Liang, Z.; Wakahara, Y. Real-time urban traffic amount prediction models for dynamic route guidance systems. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 1–13.
- Kong, X.; Xu, Z.; Shen, G.; Wang, J.; Yang, Q.; Zhang, B. Urban traffic congestion estimation and prediction based on floating car trajectory data. Future Gener. Comput. Syst. 2016, 61, 97–107.
- Ma, X.; Yu, H.; Wang, Y.; Wang, Y. Large-scale transportation network congestion evolution prediction using deep learning theory. PLoS ONE 2015, 10, e0119044.
- Davoodi, N.; Soheili, A.R.; Hashemi, S.M. A macro-model for traffic flow with consideration of driver’s reaction time and distance. Nonlinear Dyn. 2016, 83, 1621–1628.
- Qian, Z.S.; Li, J.; Li, X.; Zhang, M.; Wang, H. Modeling heterogeneous traffic flow: A pragmatic approach. Transp. Res. Part B Methodol. 2017, 99, 183–204.
- Van Der Voort, M.; Dougherty, M.; Watson, S. Combining Kohonen maps with ARIMA time series models to forecast traffic flow. Transp. Res. Part C Emerg. Technol. 1996, 4, 307–318.
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672.
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858.
- Sun, Y.; Leng, B.; Guan, W. A novel wavelet-SVM short-time passenger flow prediction in Beijing subway system. Neurocomputing 2015, 166, 109–121.
- Zhang, J.; Cui, J.; Zhong, H.; Chen, Z.; Liu, L. PA-CRT: Chinese remainder theorem based conditional privacy-preserving authentication scheme in vehicular ad-hoc networks. IEEE Trans. Dependable Secur. Comput. 2019, 722–735.
- Hong, W.-C. Traffic flow forecasting by seasonal SVR with chaotic simulated annealing algorithm. Neurocomputing 2011, 74, 2096–2107.
- Chang, H.; Lee, Y.; Yoon, B.; Baek, S. Dynamic near-term traffic flow prediction: System-oriented approach based on past experiences. IET Intell. Transp. Syst. 2012, 6, 292–305.
- Xia, D.; Wang, B.; Li, H.; Li, Y.; Zhang, Z. A distributed spatial–temporal weighted model on MapReduce for short-term traffic flow forecasting. Neurocomputing 2016, 179, 246–263.
- Moretti, F.; Pizzuti, S.; Panzieri, S.; Annunziato, M. Urban traffic flow forecasting through statistical and neural network bagging ensemble hybrid modeling. Neurocomputing 2015, 167, 3–7.
- Xu, X.; Zhang, X.; Liu, X.; Jiang, J.; Qi, L.; Bhuiyan, M.Z.A. Adaptive computation offloading with edge for 5G-envisioned internet of connected vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 5213–5222.
- Xu, X.; Liu, X.; Xu, Z.; Dai, F.; Zhang, X.; Qi, L. Trust-oriented IoT service placement for smart cities in edge computing. IEEE Internet Things J. 2019, 7, 4084–4091.
- Zhang, Y.; Yin, C.; Lu, Z.; Yan, D.; Qiu, M.; Tang, Q. Recurrent Tensor Factorization for time-aware service recommendation. Appl. Soft Comput. 2019, 85, 105762.
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.-Y. Traffic flow prediction with big data: A deep learning approach. IEEE Trans. Intell. Transp. Syst. 2014, 16, 865–873.
- Koesdwiady, A.; Soua, R.; Karray, F. Improving traffic flow prediction with weather information in connected cars: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 65, 9508–9517.
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C: Emerg. Technol. 2015, 54, 187–197.
- Menezes Jr, J.M.P.; Barreto, G.A. Long-term time series prediction with the NARX network: An empirical evaluation. Neurocomputing 2008, 71, 3335–3343.
- Yang, B.; Sun, S.; Li, J.; Lin, X.; Tian, Y. Traffic flow prediction using LSTM with feature enhancement. Neurocomputing 2019, 332, 320–327.
- Tian, Y.; Zhang, K.; Li, J.; Lin, X.; Yang, B. LSTM-based traffic flow prediction with missing data. Neurocomputing 2018, 318, 297–305.
- Zhao, Z.; Chen, W.; Wu, X.; Chen, P.C.; Liu, J. LSTM network: A deep learning approach for short-term traffic forecast. IET Intell. Transp. Syst. 2017, 11, 68–75.
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444.
- Zhang, Y.; Wang, K.; He, Q.; Chen, F.; Deng, S.; Zheng, Z.; Yang, Y. Covering-based web service quality prediction via neighborhood-aware matrix factorization. IEEE Trans. Serv. Comput. 2019.
- Zhang, Y.; Yin, C.; Wu, Q.; He, Q.; Zhu, H. Location-aware deep collaborative filtering for service recommendation. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 3796–3807.
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017.
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19.
- Li, Y.; Shahabi, C. A brief overview of machine learning methods for short-term traffic forecasting and future directions. Sigspatial Spec. 2018, 10, 3–9.
- Nagy, A.M.; Simon, V. Survey on traffic prediction in smart cities. Pervasive Mob. Comput. 2018, 50, 148–163.
- Singh, A.; Shadan, A.; Singh, R. Traffic forecasting. Int. J. Sci. Res. 2019, 7, 1565–1568.
- Boukerche, A.; Wang, J. Machine Learning-based traffic prediction models for Intelligent Transportation Systems. Comput. Netw. 2020, 181, 107530.
- Majumder, S.; Kar, S.; Pal, T. Rough-fuzzy quadratic minimum spanning tree problem. Expert Syst. 2019, 36, e12364.
- Majumder, S.; Kar, S.; Pal, T. Uncertain multi-objective Chinese postman problem. Soft Comput. 2019, 23, 11557–11572.
- Lana, I.; Del Ser, J.; Velez, M.; Vlahogianni, E. Road traffic forecasting: Recent advances and new challenges. IEEE Intell. Transp. Syst. Mag. 2018, 10, 93–109.
- Tedjopurnomo, D.A.; Bao, Z.; Zheng, B.; Choudhury, F.; Qin, A. A survey on modern deep neural network for traffic prediction: Trends, methods and challenges. IEEE Trans. Knowl. Data Eng. 2020.
- Ye, J.; Zhao, J.; Ye, K.; Xu, C. How to build a graph-based deep learning architecture in traffic domain: A survey. IEEE Trans. Intell. Transp. Syst. 2020, 1–21.
- Xie, P.; Li, T.; Liu, J.; Du, S.; Yang, X.; Zhang, J. Urban flow prediction from spatiotemporal data using machine learning: A survey. Inf. Fusion 2020, 59, 1–12.
- Kirby, H.R.; Watson, S.M.; Dougherty, M.S. Should we use neural networks or statistical models for short-term motorway traffic forecasting? Int. J. Forecast. 1997, 13, 43–50.
- Smith, B.L.; Demetsky, M.J. Traffic flow forecasting: Comparison of modeling approaches. J. Transp. Eng. 1997, 123, 261–266.
- Vlahogianni, E.I.; Golias, J.C.; Karlaftis, M.G. Short-term traffic forecasting: Overview of objectives and methods. Transp. Rev. 2004, 24, 533–557.
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Statistical methods for detecting nonlinearity and non-stationarity in univariate short-term time-series of traffic volume. Transp. Res. Part C Emerg. Technol. 2006, 14, 351–367.
- Zheng, W.; Lee, D.-H.; Shi, Q. Short-term freeway traffic flow prediction: Bayesian combined neural network approach. J. Transp. Eng. 2006, 132, 114–121.
- Sun, S.; Zhang, C. The selective random subspace predictor for traffic flow forecasting. IEEE Trans. Intell. Transp. Syst. 2007, 8, 367–373.
- Stathopoulos, A.; Dimitriou, L.; Tsekeris, T. Fuzzy modeling approach for combined forecasting of urban traffic flow. Comput.-sAided Civ. Infrastruct. Eng. 2008, 23, 521–535.
- Tan, M.-C.; Wong, S.C.; Xu, J.-M.; Guan, Z.-R.; Zhang, P. An aggregation approach to short-term traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2009, 10, 60–69.
- Kyte, M.; Urbanik, T. Traffic Signal Systems Operations and Design: An Activity-Based Learning Approach. Isolated Intersections; Pacific Crest Software Inc.: Tualatin, OR, USA, 2012; ISBN 13.


