 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Muhammad Rizwan Ghori | + 2062 word(s) | 2062 | 2021-09-18 07:34:34 | | | |
| 2 | Muhammad Rizwan Ghori | + 5 word(s) | 2067 | 2021-09-18 10:37:59 | | | | |
| 3 | Muhammad Rizwan Ghori | + 15 word(s) | 2077 | 2021-09-18 10:50:29 | | | | |
| 4 | Catherine Yang | -251 word(s) | 1826 | 2021-09-22 07:53:48 | | | | |
| 5 | Catherine Yang | -251 word(s) | 1826 | 2021-09-22 07:54:47 | | | | |
| 6 | Catherine Yang | -251 word(s) | 1826 | 2021-09-22 07:58:41 | | |
Video Upload Options
The standard Bluetooth Low-Energy mesh networks assume the use of flooding for multihop communications. The flooding approach causes network overheads and delays due to continuous message broadcasting in the absence of a routing mechanism. Among the routing protocols, AODV is one of the most popular and robust routing protocol for wireless ad hoc networks. In this paper, we optimized the AODV protocol for Bluetooth Low-Energy communication to make it more efficient in comparison to the mesh protocol. With the proposed protocol (Optimized AODV (O-AODV)), we were able to achieve lower overheads, end-to-end delay, and average per-hop one-way delay in comparison to the BLE mesh (flooding) protocol and AODV protocol for all three scenarios (linear topology with ten nodes, multipath topology with six and ten nodes). In addition, the proposed protocol exhibited practically constant route requests and route reply setup times. Furthermore, the proposed protocol demonstrated a better Packet Delivery Ratio (PDR) for O-AODV (84%) in comparison to AODV (71%), but lower than the PDR of the mesh (flooding) protocol with 93%.
1. Introduction
Bluetooth Low-Energy (BLE) is a Wireless Ad Hoc Network (WAHN) technology that is becoming increasingly popular among IoT devices that run on batteries. The Bluetooth Special Interest Group (SIG) introduced the BLE standard in Bluetooth Version 4.0, which was further improved in Bluetooth Versions 4.2 and 5 [1]. For multihop communications and network connections, BLE 4.x initially used the traditional Bluetooth-based Personal Area Network (PAN) paradigm. BLE 5 aims to address these flaws by implementing a flooding-based mesh architecture, which will enable better coverage of the network, standardized intercluster communications, and improved security [2]. The model, foundation model, and access, upper/lower transport, network, and bearer layers make up the BLE mesh system architecture, which sits on top of the BLE network stack [3].
Despite its many features, the BLE mesh protocol assumes the use of flooding for multihop communications. The flooding approach results in network overheads and delays due to continuous message broadcasting in the absence of a proper routing mechanism.
Aside from the flooding-based protocol, numerous common routing protocols for wireless ad hoc networks exist, such as AODV [4], DSR [5], and others. AODV has been used in a wide range of applications and scenarios, demonstrating its dependability and robustness.
Therefore, we considered a multihop mesh with a flat/nonhierarchical topology as a usage scenario and proposed a O-AODV protocol for BLE in by replacing the network layer protocol in the BLE mesh architecture to improve communication efficiency and reliability over the current AODV and mesh protocols. The objectives of the research in were to: (a) optimize BLE mesh performance by reducing overheads and delays in comparison with the flooding approach and (b) improve the Packet Delivery Ratio (PDR) performance of AODV.
Except for the work in reference [6] (the author tested with a single topology with six nodes (two hops)), there is no significant research available for improving the BLE mesh protocol. The AODV protocol was demonstrated to be the best among other ad hoc network protocols [7][8]. Therefore, we optimized the performance of the current version of the BLE-based AODV protocol in [9] by reducing mainly the packets’ retransmissions to reduce the delays, overheads, and traffic load. Furthermore, we conducted experiments with three topologies (linear—nine hops from the source to the sink with ten nodes, multipath—two hops from the source to the sink with multiple path availability with six nodes, partial mesh—four hops from the source to the sink with several paths with ten nodes) to evaluate the performance of our proposed protocol in [9] to that of the existing protocol.
2. Optimized-AODV Protocol Topologies and Testbed Design
This section describes the topologies and testbed architecture.
To evaluate the proposed O-AODV protocol in this research, we developed a testbed as depicted in Figure 1 and the topology diagrams in three formats: linear topology with ten nodes as shown in Figure 2, multipath topology with six nodes, and partial mesh multipath topology with ten nodes, as depicted in Figure 3 and Figure 4.
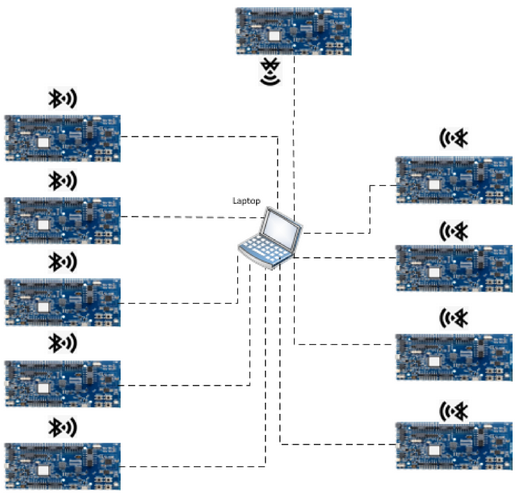
Figure 1. Testbed setup showing the USB links used for the experiment configuration and data collection [9].

Figure 2. Scenario 1: linear topology with 10 nodes [9].
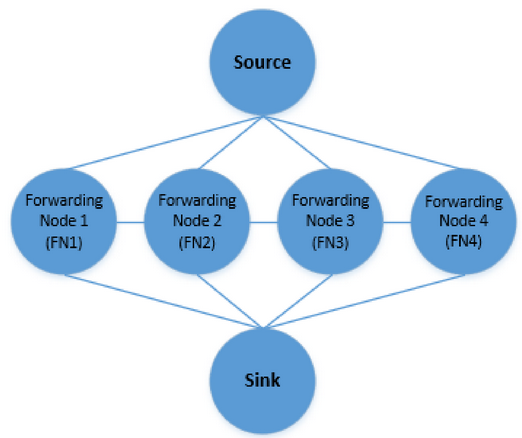
Figure 3. Scenario 2: multipath topology with 6 nodes [9].
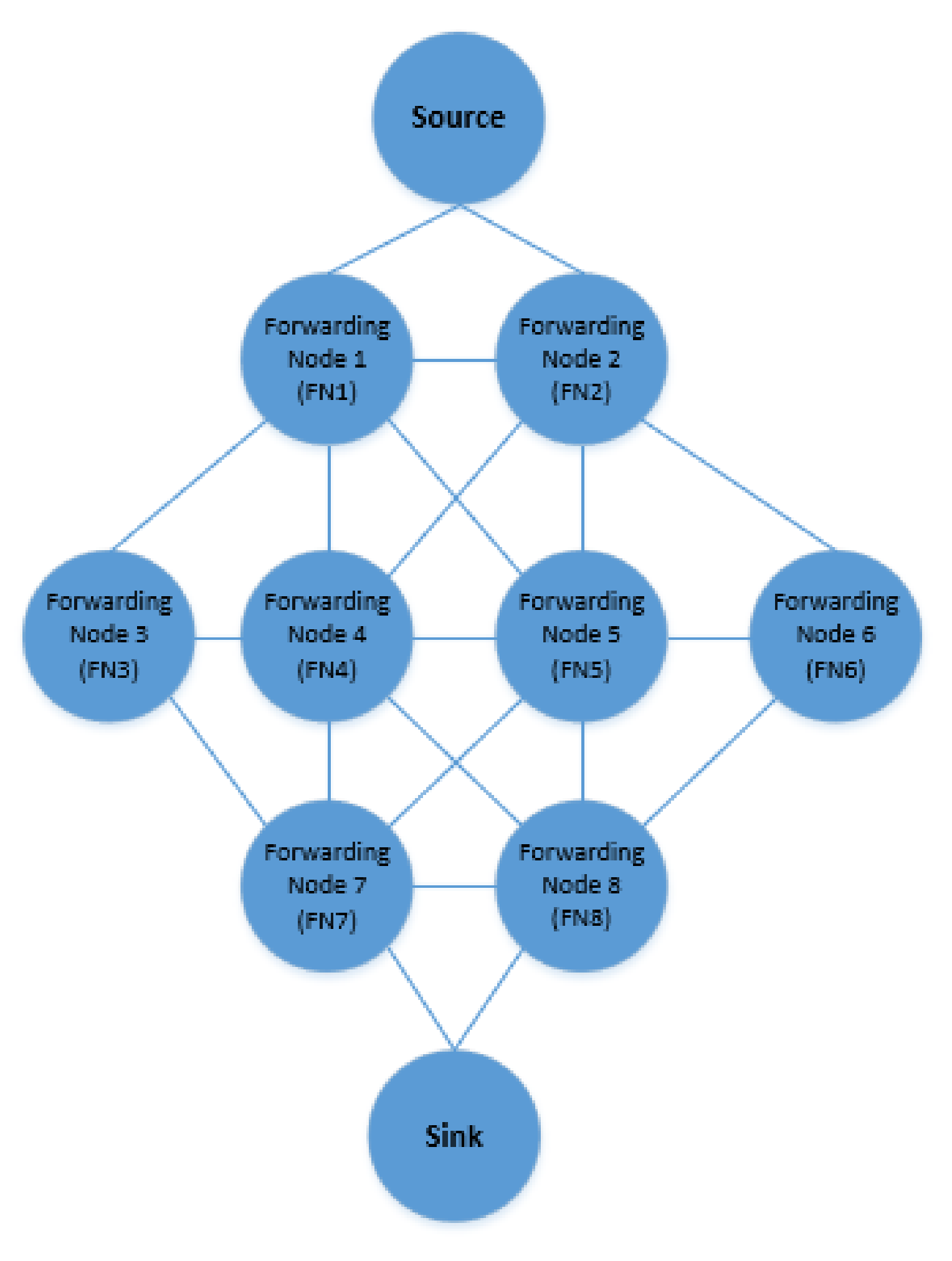
Figure 4. Scenario 3: multipath partial mesh topology with 10 nodes [9].
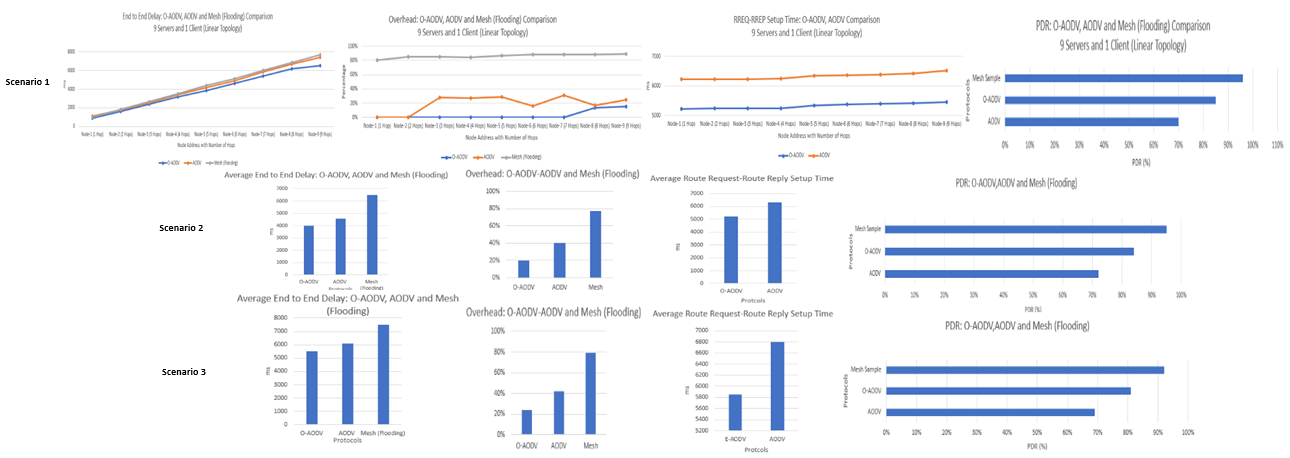 Figure 5. Results (End to End Delay, Overheads, RREQ-RREP setup time, PDR) of O-AODV, AODV and Mesh Protocols for Scenario 1, 2 and 3 [9].
Figure 5. Results (End to End Delay, Overheads, RREQ-RREP setup time, PDR) of O-AODV, AODV and Mesh Protocols for Scenario 1, 2 and 3 [9].
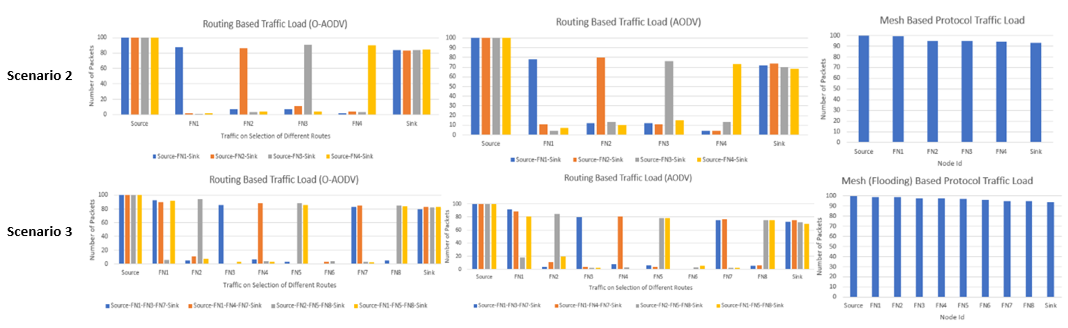
Figure 6. Results (Traffic Load) of O-AODV, AODV and Mesh Protocols for Scenario 2 and 3 [9].
3. Experiment Results, Discussion, and Research Contributions
The proposed O-AODV protocol in [9] performed better for various performance metrics, as shown in the improvements in the average end-to-end delay and overheads in comparison with AODV and flooding-based mesh as shown in Figure 5 and 6. In addition, O-AODV also showed a much better RREQ-RREP setup time in comparison with AODV.
From the overhead data shown in all three scenarios as depicted in Figure 5, directed forwarding used by the routing protocols such as AODV and O-AODV was preferred over the flooding-based forwarding used in the BLE mesh standard since the high transmission overheads of up to 83% for flooding-based mesh would significantly reduce the operating lifetimes of battery-equipped sensor nodes.
The scalability of the O-AODV protocol with respect to the number of hops was evident from Scenario 1. Since average end-to-end delay increases with the number of hops, the average per-hop delay metric is useful for comparing the performance of all three protocols. In general, O-AODV achieved from 8% to over 20% lower average per-hop delay compared to the other protocols. In addition, O-AODV exhibited almost negligible overheads for up to seven hops, whereas AODV incurred up to a 25% overhead in comparison. Moreover, there was a slight increase in the overheads of eight and nine hops where traffic from multiple sources competed for the bottleneck link towards the sink, resulting in retransmissions, which allowing us to conclude that the optimum size of the multihop topology was seven hops or less. Furthermore, O-AODV incurred a lower RREP-RREQ setup time in comparison to AODV.
The lower average one-way delays and lower overheads for O-AODV contributed more significantly to the mesh topologies used in Scenarios 2 and 3. Since there were multiple possible paths between the source and sink, the number of duplicated forwarded packets in the flooding-based mesh protocol contributed significantly to the average end-to-end delay, requiring 6500 ms for the two-hop full mesh in Scenario 2 and 7500 ms for the four-hop partial mesh in Scenario 3. The increase was not linear with the number of hops due to the random nature of the flooding process in the mesh topology. In contrast, O-AODV achieved 4000 ms for the two-hop Scenario 2 and 5500 ms for the four-hop Scenario 3, which was lower than AODV with 4500 ms and 6000 ms in Scenario 2 and 3, respectively.
Subsequently, the average one-way delay for the mesh topology scenarios increased significantly as the number of hops through the network increased. The values in Figure 5 clearly illustrate that the trend of end-to-end latency increased with the increasing number of nodes in the network. According to the mesh topology architecture, an increase in the number of full function nodes offering multihop routes led to significant network delay. Furthermore, with mesh, a greater number of full function nodes were involved in the mesh architecture, resulting in higher overall energy consumption.
The lower RREQ-RREP setup time for O-AODV in comparison to AODV was also significant. As the number of hops between the source and sink and the number of alternate paths within the mesh topology increased, the difference in the RREQ-RREP setup time of up to 1000 ms between O-AODV and AODV, as shown in Scenarios 2 and 3, would lead to much better responsiveness in terms of the networking joining time needed by new sensor nodes before they can start sending data to the sink.
Nonetheless, the improved efficiency of O-AODV in terms of the average one-way delay and overheads compared to the flooding-based mesh protocol had a tradeoff, in terms of the achieved Packet Delivery Ratio (PDR) as shown in Figure 5. For example, in Scenario 3, although O-AODV showed a higher PDR (82%) than AODV (69%), it was lower than the 92% achieved by the flooding-based mesh protocol. Nonetheless, that tradeoff may well be worthwhile given that the higher PDR of the flooding-based mesh was achieved only with much higher average one-way delays, whereas message delivery reliability can be improved via selective message retransmission in the application layer, which was expected to incur lower overheads and a lower increase in the end-to-end delays compared to the flooding-based mesh protocol.
In addition, for this research, we optimized the proposed protocol for use in scenarios involving static nodes since AODV was originally designed for mobile nodes.
4. Conclusions
This article [9] presents the proposed O-AODV protocol for BLE mesh networks and its implementation on a testbed in comparison with the AODV and mesh protocols.
There were various challenges with the experimental approach that are worth noting. One of the issues we faced was the lack of a simulation environment, which prevented us from testing for a high number of nodes because with physical devices, it was difficult to scale the experiments to a large number of nodes. The transmission power of the nodes was also lowered to limit the testbed to a more manageable size of 20 m × 20 m. Finally, radio interference is an environmental factor that is difficult to eliminate in a physical testbed. This was reduced as much as possible by locating the tested in an area with minimal cochannel interference from WiFi access points and other wireless devices.
Coming to the result outcome of this research, in terms of the PDR, the proposed protocol (84%) performed better than AODV, but not to the level of the mesh protocol. Moreover, the developed protocol outperformed AODV and mesh in terms of overheads, end-to-end one-way delays, and average per-hop delays. Furthermore, the proposed protocol had a lower RREQ-RREP setup time than the previous protocol version.
The proposed optimization in O-AODV managed to reduce the delay to 5300 ms, which was less than the delays for AODV (6200 ms) and flooding mesh (7200 ms); while the overheads were also reduced to 22%, compared to the overheads for the AODV (42%) and flooding mesh (80%) protocols. Nonetheless, the PDR performance needs to be improved. In order to reduce the 10% difference in the PDR to be on par with the mesh protocol performance, enhancements such as multipath support for AODV to increase redundancy and ensure faster route recovery need to be investigated as the next step.
Furthermore, the reduced delays and overheads will undoubtedly benefit the hospital scenario, as hospitals deal with emergencies all of the time, and delays can have a significant impact on response time during emergencies. Furthermore, lowering the overheads will benefit the network by putting less load on it, as shown in the Figure 5 and 6. In addition, there is room for improvement in PDR to bring it on par with the mesh protocols for improved reliability, since applications requiring high reliability will need to retransmit data due to packet loss, decreasing the available traffic capacity and limiting the ability to scale the network to a larger number of nodes.
The article has been published on https://doi.org/10.3390/electronics10182274.
References
- Ghori, M.R.; Wan, T.C.; Sodhy, G.C. Bluetooth Low Energy 5 Mesh Based Hospital Communication Network (B5MBHCN). In Advances in Cyber Security; Springer: Singapore, 2020; Volume 1132, pp. 247–261.
- Ghori, M.R.; Wan, T.-C.; Sodhy, G.C. Bluetooth Low Energy Mesh Networks: Survey of Communication and Security Protocols. Sensors 2020, 20, 3590.
- Bluetooth. Available online: https://www.Bluetooth.com (accessed on 21 July 2021).
- Perkins, C.; Das, S. Ad Hoc On-Demand Distance Vector (AODV) Routing; Tech. Memo.; University of California: Santa Barbara, CA, USA; University of Cincinnati: Cincinnati, OH, USA, 2003; Available online: https://tools.ietf.org/html/rfc3561 (accessed on 10 June 2021).
- Johnson, D.; Hu, Y. The Dynamic Source Routing Protocol (DSR) for Mobile Ad Hoc Networks for IPv4; Rice University: Houston, TX, USA, 2007; Available online: https://tools.ietf.org/html/rfc4728 (accessed on 5 June 2021).
- Hussein, A.; Tarek, R.; Osama, H.; Fawzy, R.; Elsayed, K.; Taha, M. An AODV-Based Routing Scheme for Large-Scale Bluetooth Low-Energy Mesh Networks. In Proceedings of the 8th International Japan-Africa Conference on Electronics, Communications, and Computations (JAC-ECC), Alexandria, Egypt, 14–15 December 2020; pp. 7–10.
- Zhang, J.; Sun, Z. Assessing multihop performance of reactive routing protocols in wireless sensor networks. In Proceedings of the IEEE International Conference on Communication Software and Networks (ICCSN), Beijing, China, 4–6 June 2016; pp. 444–449.
- Bhargava, N.; Bhargava, R.; Mathuria, M.; Kumawat, A. Performance Evaluation of Reactive and Proactive Routing Protocols over MANET. Int. J. Comput. Appl. 2013, 73, 3.
- Ghori, M.R.; Wan, T.-C.; Sodhy, G.C.; Rizwan, A. Optimization of the AODV-Based Packet Forwarding Mechanism for BLE Mesh Networks. Electronics 2021, 10, 2274. https://doi.org/10.3390/electronics10182274.

