Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Alan Perez Vidal | + 2934 word(s) | 2934 | 2021-07-30 03:58:09 | | | |
| 2 | Peter Tang | Meta information modification | 2934 | 2021-08-10 04:36:49 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Perez Vidal, A. Soft Exoskeletons. Encyclopedia. Available online: https://encyclopedia.pub/entry/12958 (accessed on 24 June 2026).
Perez Vidal A. Soft Exoskeletons. Encyclopedia. Available at: https://encyclopedia.pub/entry/12958. Accessed June 24, 2026.
Perez Vidal, Alan. "Soft Exoskeletons" Encyclopedia, https://encyclopedia.pub/entry/12958 (accessed June 24, 2026).
Perez Vidal, A. (2021, August 09). Soft Exoskeletons. In Encyclopedia. https://encyclopedia.pub/entry/12958
Perez Vidal, Alan. "Soft Exoskeletons." Encyclopedia. Web. 09 August, 2021.
Copy Citation
The present entry is oriented to the studies of the last decade and covers the upper and lower joints, specifically the shoulder, elbow, wrist, hand, hip, knee, and ankle. Its functionality, applicability, and main characteristics are exposed, such as degrees of freedom, force, actuators, power transmission methods, control systems, and sensors.
soft exoskeleton
rehabilitation therapy
robotic enhancer
daily assistance
human–machine interface
1. Introduction
Exoskeletons have been extensively researched and developed to aid the movement of various joints in the body. These devices can involve a single degree of freedom (DOF), for example, flexion and extension of the forearm, or multiple DOF, like hand movements. The complexity and physical capabilities of the exoskeleton depend on various factors, including the force/torque transmission medium, the range of motion, and the method of control.
One way to classify exoskeletons is according to their actuation devices, which can be electric, pneumatic, hydraulic, and hybrid. Electric actuators have the advantage of being fast and precise, but they are less resistant to sudden power changes. Alternatively, pneumatic and hydraulic actuators can perform various rotational changes and support heavier loads without overheating, but their power supply is weighty, complicating their portability. On the other hand, various power transmission methods have been used, for example, cables, rods, gears, elastomers, hydraulic and pneumatic hoses. The choice of these elements gives attributes to the exoskeleton that must be evaluated from the design. An incorrect configuration would negatively affect the user, not allowing continuous and prolonged use of the device.
Motor-driven metallic devices offer several advantages, including rigid and robust structures, as well as precise transmission of forces. However, these devices have certain disadvantages, such as being heavy and uncomfortable for the user. Additionally, due to their weight and complexity, most are not portable, and their installation requires trained personnel. For this reason, the development of soft robotic devices is a trend that has been increasing, and various research groups are working on their construction and innovation [1][2].
Soft exoskeletons replace many or all of the hard, big and rigid elements with soft, light, thin and flexible ones. Further, some components that must remain rigid, such as batteries and controllers, are often placed in a backpack or separately to reduce weight. These devices are lighter, more flexible, and offer greater user comfort. Additionally, due to their characteristics, they are easier to transport and install, allowing the patient to use these devices alone and in multiple locations. Soft exoskeletons have been made to aid the movement of the fingers [3][4], wrist [5][6], elbow [7][8], shoulder [9][10], hip [11][12], knee [13][14], and ankle [15][16].
2. General Applications
Soft exoskeletons are developed for different purposes. One of them is as an enhancer that increases the physical abilities or capacities of the individual [17][18]. Another use is to assist the patient with daily activities, supporting a weakened or disabled joint with a lack of strength or movement [19][20]. They are also used as rehabilitation devices, performing therapeutic movements on disabled joints [4][21].
The exoskeleton as an enhancer is used in people who do not have any motor disabilities. Further, its uses are intended to improve the skills and increase the individual’s strength. They are used for work, military, and even space purposes [22][23][24][25]. On the other hand, assistive exoskeletons help the individual through auxiliary forces to perform adequate and precise movements in daily life tasks. It is useful for the elderly who have atrophied joints, and some of their daily activities cannot be fully or partially performed. They are also used in people with motor disabilities caused by illness or accidents. Various devices have been developed to provide the power required for standing [26], walking [27], or lifting [28][29].
Another important use is rehabilitation, which presents complex structural design and control challenges. For example, forces must be imparted safely to patients with limited physical and cognitive abilities. It is well known that it is possible to improve motor skills through rehabilitation therapy like passive movement exercises, which involve repetitive movements in the affected joint. Some studies have shown that patients who use soft robotic devices in rehabilitation therapy improve the recovery of motor skills, both in the short and long term [30][31][32][33]. Including robotic exoskeletons in the rehabilitation process allows prolonged, controlled, and precise therapies, with quantitative and measurable results. Additionally, if the system is inherently safe and portable can be used outside the clinic. Increasing the safety, comfort, and quality of therapies and reducing the workload of doctors and therapists.
Various actuation methods of actuation have been implemented in soft robots, such as electroactive polymers [34][35], shape memory alloy [36][37], and fluidic actuators [38][39][40]. Electroactive polymers change shape or size when stimulated by an electric field and are widely used in robotics as actuators or sensors. Shape memory alloys are materials that change shape when subjected to thermomechanical or magnetic variations and can return to their previous form at the end of the stimulus. Fluidic actuators are commonly comprised of a chamber inflated with a pressurized fluid. They are widely used in soft robotics due to their high energy density and simple manufacturing.
On the other hand, the development of submersible technology is a growing trend in various fields such as telecommunications, sensors, and robots. Currently, several soft robotic devices have already been developed in underwater applications [41]. In order to provide precision and adaptability to the user in an environment that presents instability due to various disturbances.
3. Requirements and Challenges in the Development of Soft Exoskeletons
Different structural and functional properties must be considered in the development of soft exoskeletons. The mechanical design is a crucial element, and it is essential to define the characteristics that optimize the design and benefit the user. Some significant properties are weight, safety, portability, softness, comfort, to name a few. Each of the properties that should be considered in exoskeleton design is explained in more detail below.
Power to weight ratio: The energy demand necessary to assist any joint in the body is usually high. Therefore, it is essential to use actuators with a high power-to-weight ratio to create lightweight exoskeletons with sufficient force and speed to move the joints correctly. Due to the limited space in an exoskeleton and the high torques required for its operation, actuators usually must be modified to maximize the power-to-weight ratio. The weight must be reduced as much as possible to avoid uncomfortable loads for the user. The lower the weight of the device, the lower the inertia in operation. The actuators are components that substantially increase the weight of the exoskeleton. For this reason, it is essential to reduce the number of actuators by adding passive and quasi-passive elements to the design. For example, it is significant to include brakes or clutches to maintain a fixed position at specific times. Further, shock absorbers reduce the impact of the forces inherent to the system. Springs add some momentum to the initial phase of the movement.
Safety: It is an elementary point to consider for exoskeleton users who have motor disabilities or muscle weakness. A small error in the structure or operation of the device could cause serious injury to the user. For this reason, it is essential to include security and control elements that stop or correct the device in case of unforeseen events. Device variables must be continuously monitored. If any reading is outside the safe range, the actuators should stop or display a warning. Mechanical stops should also be included at the various joints to prevent the device from exceeding the intended ranges of motion. Additionally, sharp edges should be excluded.
Control: The control system must continuously monitor device variables such as position/angle, speed, temperature, current, and force/torque. Further, if any measure is outside the reliable ranges, corrective actions must be applied. Although soft structures are usually less dangerous than rigid ones, soft exoskeletons must be rigorously monitored as they present greater ruptures and deformations. It is crucial to include fault-tolerant control strategies that mitigate user misoperation and unforeseen structural errors. Therefore, feedback elements such as force, position, impedance, admittance, pressure, or displacement sensors are used. Likewise, electromyography and electroencephalography signals are used in motion detection for activation or deactivation of control elements. However, non-biological signals are mostly used as they are easier to identify. Some exoskeletons use impedance as the basis of control [42][43]. On some occasions, the patient has a partial motor disability and only needs to receive a specific force to complete the activity. This is a big challenge as the movement intent and power of the user must be detected correctly. Further, according to that detection, it is necessary to establish a suitable control system for the exoskeleton.
Portability: It is directly related to the weight of the device. The lower the weight of the exoskeleton, the greater the portability. Further, this benefits the patient by moving facilely without excessively fatigued. Furthermore, for portability, the device must be compact, easy to equip and remove, and maneuverable so that the user can move freely. Additionally, the system complexity should be reduced and only include the degrees of freedom that allow the desired mobility. The power supply and some actuators should be located away from the affected joint or separate from the body. Some systems are accompanied by walkers with automatic wheels, which carry heavier components, such as motors, controllers, electronic boards, and batteries [44]. Another significant point to achieve portability is to unite the device’s components in a garment that is easy to put on and take off, for example, an exoskeleton of the hand attached to a glove.
Softness: Moving from hard to soft mechanical systems has spread across many fields of robotics. This is mostly due to the desire to replicate biological models [45]. For this reason, elements such as elastomers, flexible cables, pneumatic and hydraulic pipes are incorporated for the transmission of forces and torques. The advantage of these elements is that they are easily adapted to the characteristics of the user. Additionally, they resist vibrations better and are lighter. Another advantage is that there are no maximum contact forces, as soft devices deform and distribute forces more facilely.
Comfort: Generally speaking, an exoskeleton should mimic the movement of biological joints and provide comfort to the user. The exoskeleton must include various features to provide comfort. Such as maneuverability, breathability, adaptability, softness, lightness, and simplicity to equip and remove. The more comfortable the user feels, the longer they can use the device. One way to provide user comfort is to integrate robotic devices into soft material garments that are easy to put on and take off. These are known as soft exosuits [27][46].
Durability: In soft robotic construction, the metallic and rigid elements are replaced by soft and flexible materials. These structures have greater fragility and lower durability. Additionally, other phenomena that elastic materials possess must be considered. Such as hysteresis, which becomes significant after several repetitions or cycles of action. Further, it increases the chances of failure. Therefore, to increase the device’s durability, it is necessary to add control elements that carry out the relevant measurement and correction.
Accessibility: Many of today’s exoskeletons are inaccessible outside of a clinical or specialized setting due to factors such as cost, weight, and safety. Additionally, the installation and handling of the device are often complex and require constant attention from trained personnel. Therefore, some features such as portability, simplicity, and low cost need to be implemented in the exoskeleton to increase accessibility. The accessibility of exoskeletons is improved by avoiding heavy, sharp, and complex components as much as possible and also reducing costs through the use of locally available materials.
Bidirectionality: Forces/torques must be produced in opposite directions to generate bidirectional movement in the joints. In specific cases, a unidirectional action can be used, such as for shoulder abduction and adduction, where it is possible to apply a single direction force for the abduction and separate the arm from the torso. Then, we eliminate or reduce the power to produce the adduction allowing the arm to return to its position by means of its own weight.
Transmission: Power transmission methods are highly dependent on the actuation method. For example, electric motors often include gears, cables, and pulleys. On the other hand, pneumatic and hydraulic actuators use cylinders, pistons, and flexible tubes. The pneumatic and hydraulic transmission are easier because the flexible tubes maintain uniform pressure in most of their structure, which facilitates their measurement and control. One of the advantages of the transmission system is the distal positioning of the actuators. It allows not to overload the affected joints. There are common errors in the transmission system, such as being bulky, heavy and misaligned. Furthermore, it presents undesirable deformations and disturbances, which could cause damage to the user. For this reason, the transmission must be efficient, mechanically simple, and without misalignment.
Stability: It is essential to efficiently perform any task of daily life. For example, in gait, hip abduction/adduction controls the width of the stride and thus the stability of the subject. A small disturbance implies losing control of the movement and even causing a fall. For this reason, exoskeletons must include systems for acquiring information about the state of motion to correct them with additional forces to provide greater stability.
Maneuverability: The flexibility of the mechanism plays a key role in the ergonomics and comfort of exoskeletons. The range of motion can be limited based on its material, geometry, and flexibility. Exoskeletons must be designed to preserve maneuverability by allowing a full range of motion in biological joints.
Adaptability: The dimensions of the device must be adapted to the anthropometric measurements of the patients. It should be easily adjusted for use by different users. Or also in the same patient who requires slight modifications due to morphological changes.
Modularity: Making a modular device allows changing the behavior of the system. Further, we adapt it to the evolution and abilities of the patient. This with the facility of implementing and removing modules according to the needs that are required.
Actuators: They are devices with the ability to convert energy into movement. Pneumatic, hydraulic, electric and hybrid actuators are used in robotic applications. Hydraulic and pneumatic actuators have a high power density, and their power transmission is simple. However, they require demanding maintenance to prevent leaking and corrosion. Furthermore, the power supply is usually bulky and heavy, preventing it from being compact and portable. So, it is usually placed externally to the device. On the other hand, electric actuators have higher speed and more control and precision in force, torque, displacement, rotation, etc. Additionally, batteries are more portable due to their compactness. However, its transmission method has low energy efficiency, higher complexity (gears, cables) and misalignments.
Fixation: The design of exoskeletons often includes fixators that maintain the position of the device despite the transmission of forces. The fixators must resist the pushing force of the actuators. Further, they should not put pressure on the body for a long time because it causes medical problems due to prolonged stress. Therefore, it is advisable to use a controlled fixator, applying compressive forces only when is needed.
Alignment: It is of great importance to achieve efficient mobility. However, misalignment is normal due to substantial movement of the skin with the bone or unexpected forces. Therefore, it is essential to guarantee the device alignment through correct fixation or adding a control system that corrects misalignment.
Costs: The exoskeleton must be affordable for patients or health institutions. For this, in the design of the exoskeleton, it is essential to include components of easy acquisition in the marking and simplify the manufacturing process.
4. Development of Soft Exoskeletons
A prosthesis is used to replace a joint in the body. Further, the exoskeleton is designed to fit around a joint according to the physiological characteristics of the user. It is often used to activate a paralyzed or semi-paralyzed joint. It is divided into two main parts, the mechanics and the control system. Aspects such as DOF, support structure, actuators, and transmission components must be analyzed in the mechanical system. Further, the sensors, encoders, and control signals must be considered in the control system. Wearable devices are rapidly evolving to meet the mobility and autonomy needs of people with motor disabilities. Soft and portable exoskeletons are a trend that seeks to replace rigid materials that are heavy and uncomfortable with lightweight materials such as fabric, elastomer, plastic, cable or silicone-based elements. To better understand the development of these devices, it is essential to know some important concepts. For example, the planes and axes of motion, shown in Figure 1. Three planes divide the body, one is the sagittal plane that is divided into right and left. Another is the frontal plane that divides into anterior and posterior, and finally, the transverse plane that divides into superior and inferior. Likewise, there are three axes of a movement known as the medial–lateral axis (sagittal plane), anteroposterior axis (frontal plane), and longitudinal axis (transverse plane). A degree of freedom is the change in position that occurs in a plane. Further, the human body has different joints that vary in the number of degrees of freedom to complete their movements (uniaxial, biaxial, and triaxial).
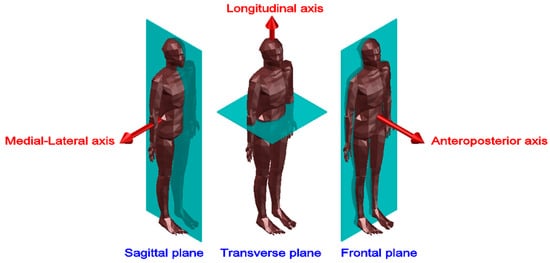
Figure 1. Planes and axes of movement of the human body.
The movements related to the sagittal plane are flexion and extension, such as bending the trunk back and forth, or raising and lowering the leg. Changes in position in the frontal plane are related to abduction and adduction movements, lateral flexion of the trunk and head, or inversion and eversion of the foot. The transverse plane corresponds to the rotation of the hip, shoulder or spine, as well as the pronation and supination of the forearm.
References
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17.
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182.
- Takahashi, N.; Takahashi, H.; Koike, H. Soft Exoskeleton Glove Enabling Force Feedback for Human-Like Finger Posture Control with 20 Degrees of Freedom. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 217–222.
- Yap, H.K.; Goh, J.C.H.; Yeow, R.C.H. Design and Characterization of Soft Actuator for Hand Rehabilitation Application. In Proceedings of the 6th European Conference of the International Federation for Medical and Biological Engineering, Dubrovnik, Croatia, 7–11 September 2014; Volume 45, pp. 367–370, ISBN 978-3-319-11127-8.
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Wrist Rehabilitation Exoskeleton Robot Based on Pneumatic Soft Actuators. In Proceedings of the 2016 International Conference for Students on Applied Engineering (ICSAE), Newcastle Upon Tyne, UK, 20–21 October 2017; pp. 491–496.
- Li, N.; Yang, T.; Yang, Y.; Yu, P.; Xue, X.; Zhao, X.; Song, G.; Elhajj, I.H.; Wang, W.; Xi, N.; et al. Bioinspired Musculoskeletal Model-Based Soft Wrist Exoskeleton for Stroke Rehabilitation. J. Bionic Eng. 2020, 17, 1163–1174.
- Ismail, R.; Ariyanto, M.; Perkasa, I.A.; Adirianto, R.; Putri, F.T.; Glowacz, A.; Caesarendra, W. Soft Elbow Exoskeleton for Upper Limb Assistance Incorporating Dual Motor-Tendon Actuator. Electronics 2019, 8, 1184.
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Design and Fuzzy Sliding Mode Admittance Control of a Soft Wearable Exoskeleton for Elbow Rehabilitation. IEEE Access 2018, 6, 60249–60263.
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A Soft Wearable Robot for the Shoulder: Design, Characterization, and Preliminary Testing. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1672–1678.
- Kesner, S.B.; Jentoft, L.; Hammond, F.L.; Howe, R.D.; Popovic, M. Design Considerations for an Active Soft Orthotic System for Shoulder Rehabilitation. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 8130–8134.
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft Exosuit for Hip Assistance. Robot. Auton. Syst. 2015, 73, 102–110.
- Chen, C.; Zhang, Y.; Li, Y.; Wang, Z.; Liu, Y.; Cao, W.; Wu, X. Iterative Learning Control for a Soft Exoskeleton with Hip and Knee Joint Assistance. Sensors 2020, 20, 4333.
- Sridar, S.; Nguyen, P.H.; Zhu, M.; Lam, Q.P.; Polygerinos, P. Development of a Soft-Inflatable Exosuit for Knee Rehabilitation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3722–3727.
- Zhang, L.; Huang, Q.; Cai, K.; Wang, Z.; Wang, W.; Liu, J. A Wearable Soft Knee Exoskeleton Using Vacuum-Actuated Rotary Actuator. IEEE Access 2020, 8, 61311–61326.
- Lee, S.; Crea, S.; Malcolm, P.; Galiana, I.; Asbeck, A.; Walsh, C. Controlling Negative and Positive Power at the Ankle with a Soft Exosuit. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3509–3515.
- Siviy, C.; Bae, J.; Baker, L.; Porciuncula, F.; Baker, T.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. Offline Assistance Optimization of a Soft Exosuit for Augmenting Ankle Power of Stroke Survivors during Walking. IEEE Robot. Autom. Lett. 2020, 5, 828–835.
- Lessard, S.; Pansodtee, P.; Robbins, A.; Baltaxe-admony, L.B.; Trombadore, J.M.; Teodorescu, M.; Agogino, A.; Kurniawan, S. CRUX: A Compliant Robotic Upper-Extremity EXosuit for Lightweight, Portable, Multi-Joint Muscular Augmentation. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1633–1638.
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S.; Theodoridis, T. Novel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human Intention. Intell. Serv. Robot. 2018, 11, 247–268.
- Jung, M.M.; Ludden, G.D.S. Potential of Exoskeleton Technology to Assist Older Adults with Daily Living. In Proceedings of the CHI’ 18: CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 August 2018.
- Eugene Kar Jian, C.; Gouwanda, D.; Kheng, T.K. Wearable Hand Exoskeleton for Activities of Daily Living. In Proceedings of the 2018 IEEE-EMBS Conference on Biomedical Engineering and Sciences (IECBES), Sarawak, Malaysia, 3–6 December 2019; pp. 221–225.
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. Flexo-Glove: A 3D Printed Soft Exoskeleton Robotic Glove for Impaired Hand Rehabilitation and Assistance. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 2120–2123.
- Diftler, M.A.; Bridgwater, L.B.; Rogers, J.M. RoboGlove—A Grasp Assist Device for Earth and Space. In Proceedings of the 45th International Conference on Environmental Systems, Bellevue, WA, USA, 12–16 July 2015; pp. 1–8.
- Lee, S.; Kim, J.; Baker, L.; Long, A.; Karavas, N.; Menard, N.; Galiana, I.; Walsh, C.J. Autonomous Multi-Joint Soft Exsosuit with Online Optimization Reduces Energy Cost of Loaded Walking. J. Neuroeng. Rehabil. 2018. under review.
- Scataglini, S.; Andreoni, G.; Gallant, J. A Review of Smart Clothing in Military. In Proceedings of the MobiSys’15: The 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18 May 2015; pp. 53–54.
- Thalman, C.M.; Lam, Q.P.; Nguyen, P.H.; Sridar, S.; Polygerinos, P. A Novel Soft Elbow Exosuit to Supplement Bicep Lifting Capacity. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6965–6971.
- Veale, A.J.; Staman, K.; Van Der Kooij, H. Soft, Wearable, and Pleated Pneumatic Interference Actuator Provides Knee Extension Torque for Sit-to-Stand. Soft Robot. 2021, 8, 28–43.
- Asbeck, A.T.; de Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A Biologically Inspired Soft Exosuit for Walking Assistance. Int. J. Robot. Res. 2015, 34, 744–762.
- Yang, X.; Huang, T.H.; Hu, H.; Yu, S.; Zhang, S.; Zhou, X.; Carriero, A.; Yue, G.; Su, H. Spine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance. IEEE Robot. Autom. Lett. 2019, 4, 4547–4554.
- Kim, Y.G.; Little, K.; Noronha, B.; Xiloyannis, M.; Masia, L.; Accoto, D. A Voice Activated Bi-Articular Exosuit for Upper Limb Assistance during Lifting Tasks. Robot. Comput. Integr. Manuf. 2020, 66, 101995.
- Prange, G.B.; Jannink, M.J.A.; Groothuis-Oudshoorn, C.G.M.; Hermens, H.J.; Ijzerman, M.J. Systematic Review of the Effect of Robot-Aided Therapy on Recovery of the Hemiparetic Arm after Stroke. J. Rehabil. Res. Dev. 2006, 43, 171–183.
- Haghshenas-Jaryani, M.; Nothnagle, C.; Patterson, R.M.; Bugnariu, N.; Wijesundara, M.B.J. Soft Robotic Rehabilitation Exoskeleton (REHAB Glove) for Hand Therapy. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017; Volume 3.
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Cho Hong Goh, J.; Yeow, C.H. Characterisation and Evaluation of Soft Elastomeric Actuators for Hand Assistive and Rehabilitation Applications. J. Med. Eng. Technol. 2016, 40, 199–209.
- Lessard, S.; Pansodtee, P.; Robbins, A.; Trombadore, J.M.; Kurniawan, S.; Teodorescu, M. A Soft Exosuit for Flexible Upper-Extremity Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1604–1617.
- Wang, H.; Chen, J.; Lau, H.Y.K.; Ren, H. Motion Planning Based on Learning from Demonstration for Multiple-Segment Flexible Soft Robots Actuated by Electroactive Polymers. IEEE Robot. Autom. Lett. 2016, 1, 391–398.
- Mutlu, R.; Alici, G.; Li, W. Electroactive Polymers as Soft Robotic Actuators: Electromechanical Modeling and Identification. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1096–1101.
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2014, 56, 1078–1113.
- Jin, H.; Dong, E.; Xu, M.; Liu, C.; Alici, G.; Jie, Y. Soft and Smart Modular Structures Actuated by Shape Memory Alloy (SMA) Wires as Tentacles of Soft Robots. Smart Mater. Struct. 2016, 25, 1–10.
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3.
- Wang, T.; Zhang, Y.; Chen, Z.; Zhu, S. Parameter Identification and Model-Based Nonlinear Robust Control of Fluidic Soft Bending Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 1346–1355.
- Wang, T.; Zhang, Y.; Zhu, Y.; Zhu, S. A Computationally Efficient Dynamical Model of Fluidic Soft Actuators and Its Experimental Verification. Mechatronics 2019, 58, 1–8.
- Subad, R.A.S.I.; Cross, L.B.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356–383.
- Huo, W.; Mohammed, S.; Amirat, Y.; Kong, K. Active Impedance Control of a Lower Limb Exoskeleton to Assist Sit-to-Stand Movement. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3530–3536.
- Aguirre-Ollinger, G.; Colgate, J.E.; Peshkin, M.A.; Goswami, A. Active-Impedance Control of a Lower-Limb Assistive Exoskeleton. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 188–195.
- Kong, K.; Jeon, D. Design and Control of an Exoskeleton for the Elderly and Patients. IEEE/ASME Trans. Mechatron. 2006, 11, 428–432.
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft Robotics: Biological Inspiration, State of the Art, and Future Research. Appl. Bionics Biomech. 2008, 5, 99–117.
- Asbeck, A.T.; Schmidt, K.; Galiana, I.; Wagner, D.; Walsh, C.J. Multi-Joint Soft Exosuit for Gait Assistance. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6197–6204.
More
Information
Subjects:
Robotics
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.7K
Revisions:
2 times
(View History)
Update Date:
10 Aug 2021
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No