Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Akash Samanta | + 1933 word(s) | 1933 | 2021-06-03 05:54:48 | | | |
| 2 | Catherine Yang | Meta information modification | 1933 | 2021-06-04 04:08:28 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Samanta, A. ML-Based LIB Fault Diagnosis. Encyclopedia. Available online: https://encyclopedia.pub/entry/10484 (accessed on 25 June 2026).
Samanta A. ML-Based LIB Fault Diagnosis. Encyclopedia. Available at: https://encyclopedia.pub/entry/10484. Accessed June 25, 2026.
Samanta, Akash. "ML-Based LIB Fault Diagnosis" Encyclopedia, https://encyclopedia.pub/entry/10484 (accessed June 25, 2026).
Samanta, A. (2021, June 03). ML-Based LIB Fault Diagnosis. In Encyclopedia. https://encyclopedia.pub/entry/10484
Samanta, Akash. "ML-Based LIB Fault Diagnosis." Encyclopedia. Web. 03 June, 2021.
Copy Citation
Fault detection/diagnosis has become a crucial function of the battery management system (BMS) due to the increasing application of lithium-ion batteries (LIBs) in highly sophisticated and high-power applications to ensure the safe and reliable operation of the system.
Battery Management System (BMS)
Artificial Neural Network (ANN)
Support Vector Machine (SVM)
Random Forest Classifier
Electric Vehicle
Transportation Electrification
Grid-tied Energy Storage
Machine Learning
1. Introduction
Owing to their high energy density, high power density, long service life, environmental friendliness and low self-discharge rate, lithium-ion batteries (LIBs) have become the prime energy storage system for many applications such as electric vehicles (EVs), grid-level power storage and several other consumer electronics [1][2]. However, the safe and reliable operating area of the LIB is very narrow, which necessitates a battery management system (BMS) for effective operational control, protection and energy management [3][4][5][6][7]. In addition, due to the limitation of the cell voltage and storage capacity of a single LIB cell, high power applications of LIBs such as EVs and grid-tied energy storage systems require hundreds or even thousands of single battery cells [8]. Cell inconsistencies in a LIB pack are a common issue; thus an appropriate BMS is also indispensable for the safe and reliable operation of the LIB pack as well as every single cell of the battery pack [9][10]. A BMS can be designed to serve many functions including but not limited to data acquisition, estimation of the state of charge (SOC) [11][12] and state of health (SOH) [13][14], temperature measurement/estimation [15], cell balancing [16][17], fault detection/diagnosis [18][19] and thermal management [16]. Very recently researchers have started paying attention to the detection/diagnosis of faults after the occurrence of several accidents in e-transportation due to the failure of the LIB system [20][21]. It was evidenced that extreme operating conditions, manufacturing flaws and battery aging were among the prime reasons behind the battery system failure.
The performance of LIB is affected by different abusive operating conditions such as overcharge or over-discharge event, startup at low temperature, vibration and higher heat generation resulting in metallic lithium plating, formation of solid electrolyte interphase layer and formation of lithium dendrite that eventually accelerate the aging of LIB and may lead to catastrophic failure during operation [22][23][24]. Therefore, the presence of fault detection and diagnosis features of BMS is highly critical for LIB-powered systems, especially for high-power applications. Smarsly et al. [25] demonstrated that a minor fault could eventually result in dangerous consequences without proper fault diagnosis and defense mechanism. Relevant discussion on the importance of fault diagnosis and defense mechanisms was also presented by Williard et al. in references [26] and [20]. Studies on LIB fault mechanisms that tried to find the causes and consequences of LIB faults have been extensively reported in the literature. Research on LIB fault detection and diagnosis has gained momentum in the last few years. Faults in the LIB system are typically classified as internal and external faults. Some of the most frequently reported external faults are cell wiring faults, faults in the thermal management system and sensor faults such as temperature, voltage and current sensor faults, whereas some common internal battery faults are overcharged, over-discharged, internal short circuit (ISC), accelerated degradation and thermal runaway. Tran et al. [19] presented a detailed classification of the commonly reported LIB faults. A few other studies also classified the LIB faults from control system perspectives [27]. They grouped the overcharged, over-discharged, overheating, external short circuit (ESC), ISC, electrolyte leakage, battery swelling, battery accelerated degradation and thermal runaway faults as battery faults. On the other hand, the voltage, current and temperature sensor faults were grouped under the sensor faults and the terminal connector fault, cooling system fault, controller area network (CAN) bus fault, high voltage contactor fault and fuse fault were included under actuator faults.
Realizing the importance of fault detection/diagnosis for the safe and reliable operation of LIB, a significant number of research studies were conducted aiming towards developing an accurate, reliable, robust and easy to implement fault diagnostic strategy. Lu et al. [28] briefly illustrated the reason why the development of an effective fault diagnosis system is crucial for the advancement of LIB-powered systems. Special concentration on the sensor fault diagnosis was provided by Xiong et al. [18]. Lyu et al. [29] presented a detailed discussion particularly on the failure mechanism of LIB and its possible solutions through a state-of-the-art review study. Fault diagnosis methods reported in the literature can be broadly categorized into model-based and non-model-based methods. However, a fusion of these two categories is also reported. A detailed classification of LIB fault diagnosis methods is presented in Figure 1.
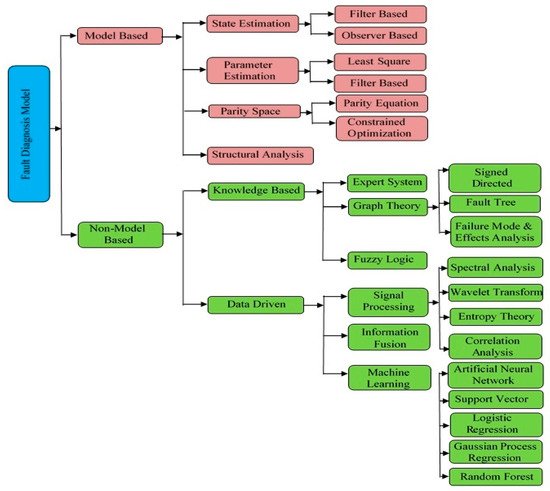
Figure 1. Classification of LIB fault diagnosis methods.
It is noticed from the literature that model-based and signal processing-based methods have been most extensively used for the LIB fault detection among the fault diagnosis methods mentioned in Figure 1. Machine Learning (ML)-based techniques were very recently adopted; however, they are increasing at a much faster pace owing to some of the prominent advantages such as a high level of accuracy, compatibility with the highly nonlinear LIB system and reduced dependence on domain experts. The accuracy and reliability of model-based fault diagnostic strategies predominantly depend on the accurate equivalent circuit model (ECM) of LIB. Obtaining a highly accurate model is challenging as the internal characteristics of the highly nonlinear LIB are still not fully understood. This limitation is eliminated with the advent of ML-based techniques. Furthermore, the impacts of measurement noises that limit the application of signal processing-based methods are also reduced to a significant extent with the deployment of ML-based techniques. In short, ML-based techniques simplified the fault diagnosis by eliminating two complex and time-consuming steps: Collecting the battery’s accurate physical information and learning the nonlinear correlation between battery internal parameters and external measured parameters such as operating current, terminal voltage and temperature. These eventually reduce the requirement of domain-specific knowledge, time and the cost of the system development.
2. ML-Based Fault Diagnosis Techniques
Currently, ML techniques are extensively used in the BMS of LIBs. A summary of ML approaches in BMS is presented by Reza et al. through a review study [23]. Here, this section aims to provide an overview of different ML techniques that are currently being used in BMS applications specifically for LIB fault diagnosis. A complete family of ML approaches that are successfully used in BMS of LIB is illustrated in Figure 2. Among all these, the ML approaches that were already employed for the LIB fault diagnosis are highlighted in green color, whereas the remaining potential approaches are highlighted in yellow for the readers’ convenience. A brief description of each ML-based fault diagnosis technique as mentioned in Figure 2 is presented below.
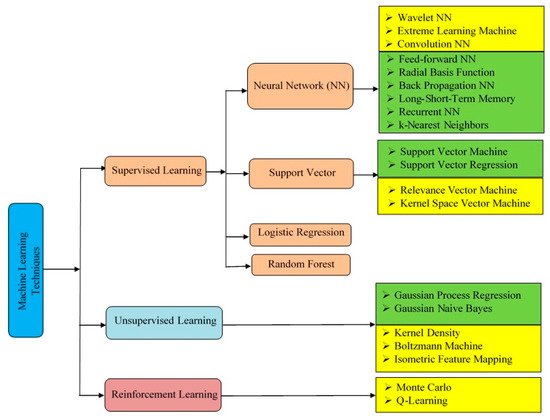
Figure 2. A complete family of ML approaches, used in BMS of LIB.
2.1. Artificial Neural Network
Artificial Neural Network (ANN) is one of the most widely used frameworks of ML algorithms to perform a wide variety of tasks [30][31]. It is inspired by the biological neural networks that constitute animal brains. ANN uses supervised learning approaches during model training. Features like self-adaptability and learning abilities of the animal brain enable ANN to perform tasks by considering examples, generally without being programmed with task-specific rules. Moreover, ANN is capable of effectively capturing the dynamics of a highly nonlinear system. All these features make it suitable for LIB due to its highly complex and nonlinear dynamic characteristics. The basic strategy is to form a nonlinear black-box of an ANN-based fault diagnosis model by learning implicit rules from known pairs of input and output data, then to validate the model by test input and output data that are unknown to the model. The training is typically conducted offline. Then the ANN model can effectively distinguish between the normal and abnormal conditions of the battery system provided the ANN model is well-trained with a sufficient amount of data. There are several variants of ANN that can be broadly classified into two subgroups. The classic neural networks subgroup includes wavelet neural network (WNN), back-propagation neural network (BPNN), radial basis function network (RBFN), feed-forward neural network (FFNN) and extreme learning machine (ELM). On the other hand, modern neural networks are often recognized as deep NNs, which mainly include recurrent neural networks (RNNs) and convolutional neural networks (CNNs). Often a combination of one of these techniques is also used in BMS applications such as long short-term memory network (LSTM) and RNN-LSTM. Here, LSTM is an expansion of RNN and CNN; similarly, RNN-LSTM is a combination of RNN and LSTM. There are several other variants of ANN that were discussed in detail by S. Walczak [32]. However, among these ANN-based techniques only basic ANN, LSTM, RNN, RNN-LSTM, and few other hybrid techniques have so far been used for fault detection of LIBs as mentioned in Figure 2.
2.2. Random Forest Classifier
Like ANN, Random Forest (RF) classifier is also a supervised ML approach that has demonstrated satisfactory performance while employed in various classification problems such as sleep stage classifications from electroencephalography (EEG) data [33], bearing fault identification from vibration data [34], facial expression detection from video data [35], crop type classification from hyperspectral images [36], lung vessel segmentation from computed tomography (CT) images [37] and many more [38][39]. RF uses the multiple numbers of trees of slightly different structures that are collectively employed for classifications. Collaboration among trees in RF makes the model more robust compared to any single classifier typically used in other statistical classification problems [40]. RF is a linear classifier with reduced computational complexity when compared to some other popular classifiers, making it suitable for lightweight algorithms for real-time operation [41]. Moreover, the scaling of the features is highly convenient and the parallel operation of the algorithm alongside the primary usage of the system is not an issue as well.
2.3. Support Vector Machine
Despite the requirement of highly complex quadratic programming, the Support Vector Machine (SVM) is increasingly used for solving classification and regression problems in recent times [39][42]. SVM tries to form different data clusters by constructing hyperplanes in high dimensional space in order to distinguish a different class of data while dealing with classification problems. The typical criteria for finding optimal separation boundaries are to maximize the distance between the hyperplane and the nearest data point of any cluster. SVM is becoming a powerful tool for regression analysis in highly nonlinear systems like LIB. The use of SVM in regression is also termed Support Vector Regression (SVR). SVR uses different kernel functions and regression algorithms to transfigure a nonlinear model into a linear model for ease of analysis. There is also another variant of SVM, namely, kernel space vector machine (KSVM). Further details of SVM can be found in reference [43]. Like ANN, SVM-based fault diagnostic techniques also do not require an equivalent battery model. SVM is also a supervised ML approach. So far, only SVR and SVM have been used for fault diagnosis of LIBs in this category.
2.4. Gaussian Process Regression
Gaussian Process Regression (GPR) is an unsupervised ML technique. The two primary goals of this technique are clustering the data into groups by similarity and dimensionality reduction to compress the data while maintaining its structure and usefulness of data. GPR also uses kernel-based ML approaches which can discover prognostics by leveraging prior knowledge based on the Bayesian model. Thereafter, it utilizes the variance around its mean prediction to provide information about the associated uncertainty in the system. So far very few studies have used GPR for LIB fault diagnosis.
2.5. Logistic Regression
Logistic Regression (LR) is a statistical classification technique used to classify observed data based on the pre-defined criteria [44][45]. This method is the simplest method for two-class classification and has shown very good performance in linear and nonlinear regression. However, so far very few researchers have employed LR for fault detection/diagnosis in the LIB system [46].
References
- Luo, X.; Kang, L.; Lu, C.; Linghu, J.; Lin, H.; Hu, B. An Enhanced Multicell-to-Multicell Battery Equalizer Based on Bipolar-Resonant LC Converter. Electronics 2021, 10, 293.
- Gao, M.; Qu, J.; Lan, H.; Wu, Q.; Lin, H.; Dong, Z.; Zhang, W. An active and passive hybrid battery equalization strategy used in group and between groups. Electronics 2020, 9, 1744.
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery management systems in electric and hybrid vehicles. Energies 2011, 4, 1840–1857.
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28.
- Doridant, A.; Abouda, K.; Givelin, P.; Thibaud, B. Battery Management System Demonstrator Board design using EMC System simulation. In Proceedings of the EMC Europe 2019—2019 International Symposium on Electromagnetic Compatibility, Barcelona, Spain, 2–6 September 2019.
- Aiello, O.; Crovetti, P.S.; Fiori, F. Susceptibility to EMI of a Battery Management System IC for electric vehicles. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility, Dresden, Germany, 16–22 August 2015.
- Aiello, O. Electromagnetic susceptibility of battery management systems’ ICs for electric vehicles: Experimental study. Electronics 2020, 9, 510.
- Jaguemont, J.; Boulon, L.; Dubé, Y. A comprehensive review of lithium-ion batteries used in hybrid and electric vehicles at cold temperatures. Appl. Energy 2016, 164, 99–114.
- Lee, C.-J.; Kim, B.-K.; Kwon, M.-K.; Nam, K.; Kang, S.-W. Real-Time Prediction of Capacity Fade and Remaining Useful Life of Lithium-Ion Batteries Based on Charge/Discharge Characteristics. Electronics 2021, 10, 846.
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery management system hardware concepts: An overview. Appl. Sci. 2018, 8, 534.
- Ko, Y.; Choi, W. A new soc estimation for lfp batteries: Application in a 10 ah cell (hw 38120 l/s) as a hysteresis case study. Electronics 2021, 10, 705.
- Xu, P.; Li, J.; Sun, C.; Yang, G.; Sun, F. Adaptive state-of-charge estimation for lithium-ion batteries by considering capacity degradation. Electronics 2021, 10, 122.
- Sung, W.; Lee, J. Implementation of SOH estimator in automotive BMSs using recursive least-squares. Electronics 2019, 8, 1237.
- Jiang, Y.; Jiang, J.; Zhang, C.; Zhang, W.; Gao, Y.; Li, N. State of health estimation of second-life LiFePO4 batteries for energy storage applications. J. Clean. Prod. 2018.
- Surya, S.; Marcis, V.; Williamson, S. Core Temperature Estimation for a Lithium ion 18650 Cell. Energies 2020, 14, 87.
- Samanta, A.; Chowdhuri, S. Active Cell Balancing of Lithium-ion Battery Pack Using Dual DC-DC Converter and Auxiliary Lead-acid Battery. J. Energy Storage 2020, 102109.
- Uno, M.; Ueno, T.; Yoshino, K. Cell voltage equalizer using a selective voltage multiplier with a reduced selection switch count for series-connected energy storage cells. Electronics 2019, 8, 1303.
- Xiong, R.; Yu, Q.; Shen, W. Review on sensors fault diagnosis and fault-tolerant techniques for lithium ion batteries in electric vehicles. In Proceedings of the 13th IEEE Conference on Industrial Electronics and Applications, ICIEA 2018, Wuhan, China, 31 May–2 June 2018.
- Tran, M.K.; Fowler, M. A review of lithium-ion battery fault diagnostic algorithms: Current progress and future challenges. Algorithms 2020, 13, 62.
- Abada, S.; Marlair, G.; Lecocq, A.; Petit, M.; Sauvant-Moynot, V.; Huet, F. Safety focused modeling of lithium-ion batteries: A review. J. Power Sources 2016, 306, 178–192.
- Wang, Z.; Hong, J.; Liu, P.; Zhang, L. Voltage fault diagnosis and prognosis of battery systems based on entropy and Z-score for electric vehicles. Appl. Energy 2017.
- Wu, C.; Zhu, C.; Ge, Y. A New Fault Diagnosis and Prognosis Technology for High-Power Lithium-Ion Battery. IEEE Trans. Plasma Sci. 2017, 45, 1533–1538.
- Kim, H.; Shin, K.G. Modeling of externally-induced/common-cause faults in fault-tolerant systems. In Proceedings of the IEEE/AIAA Digital Avionics Systems Conference, Phoenix, AZ, USA, 30 October–3 November 1994.
- Wu, C.; Zhu, C.; Ge, Y.; Zhao, Y. A Review on Fault Mechanism and Diagnosis Approach for Li-Ion Batteries. J. Nanomater. 2015.
- Smarsly, K.; Law, K.H. Decentralized fault detection and isolation in wireless structural health monitoring systems using analytical redundancy. Adv. Eng. Softw. 2014.
- Williard, N.; He, W.; Hendricks, C.; Pecht, M. Lessons learned from the 787 dreamliner issue on Lithium-Ion Battery reliability. Energies 2013, 6, 4682–4695.
- Hu, X.; Zhang, K.; Liu, K.; Lin, X.; Dey, S.; Onori, S. Advanced Fault Diagnosis for Lithium-Ion Battery Systems. TechRxiv 2020.
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288.
- Lyu, D.; Ren, B.; Li, S. Failure modes and mechanisms for rechargeable Lithium-based batteries: A state-of-the-art review. Acta Mech. 2019, 230, 701–727.
- Varshney, A.; Ghosh, S.K.; Padhy, S.; Tripathy, R.K.; Acharya, U.R. Automated Classification of Mental Arithmetic Tasks Using Recurrent Neural Network and Entropy Features Obtained from Multi-Channel EEG Signals. Electronics 2021, 10, 1079.
- Lain, J.-K.; Chen, Y.-H. An ANN-Based Adaptive Predistorter for LED Nonlinearity in Indoor Visible Light Communications. Electronics 2021, 10, 948.
- Walczak, S. Artificial neural networks. In Advanced Methodologies and Technologies in Artificial Intelligence, Computer Simulation, and Human-Computer Interaction; Khosrow-Pour, D.B.A.M., Ed.; Advances in Computer and Electrical Engineering; IGI Global: Hershey, PA, USA, 2019; pp. 40–53. ISBN 9781522573685.
- Memar, P.; Faradji, F. A Novel Multi-Class EEG-Based Sleep Stage Classification System. IEEE Trans. Neural Syst. Rehabil. Eng. 2018.
- Wang, Z.; Zhang, Q.; Xiong, J.; Xiao, M.; Sun, G.; He, J. Fault Diagnosis of a Rolling Bearing Using Wavelet Packet Denoising and Random Forests. IEEE Sens. J. 2017.
- Abd El Meguid, M.K.; Levine, M.D. Fully automated recognition of spontaneous facial expressions in videos using random forest classifiers. IEEE Trans. Affect. Comput. 2014.
- Zhang, H.; Li, Q.; Liu, J.; Shang, J.; Du, X.; McNairn, H.; Champagne, C.; Dong, T.; Liu, M. Image Classification Using RapidEye Data: Integration of Spectral and Textual Features in a Random Forest Classifier. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017.
- Zhao, B.; Cao, Z.; Wang, S. Lung vessel segmentation based on random forests. Electron. Lett. 2017.
- Choi, D.; Yim, J.; Baek, M.; Lee, S. Machine learning-based vehicle trajectory prediction using v2v communications and on-board sensors. Electronics 2021, 10, 420.
- Xie, Z.; Du, S.; Lv, J.; Deng, Y.; Jia, S. A hybrid prognostics deep learning model for remaining useful life prediction. Electronics 2021, 10, 39.
- Dietterich, T.G. Ensemble Methods in Machine Learning. In International Workshop on Multiple Classifier Systems; Springer: Berlin/Heidelberg, Germany, 2000; pp. 1–15.
- Yin, Z.; Wang, L.; Zhang, Y.; Gao, Y. A novel arc fault detection method integrated random forest, improved multi-scale permutation entropy and wavelet packet transform. Electronics 2019, 8, 396.
- Kim, B.; Im, S.; Yoo, G. Performance evaluation of cnn-based end-point detection using in-situ plasma etching data. Electronics 2021, 10, 49.
- Ma, Y.; Guo, G. Support Vector Machines Applications; Springer International Publishing: Cham, Switzerland, 2014; ISBN 9783319023007.
- Wang, S.H.; Zhan, T.M.; Chen, Y.; Zhang, Y.; Yang, M.; Lu, H.M.; Wang, H.N.; Liu, B.; Phillips, P. Multiple Sclerosis Detection Based on Biorthogonal Wavelet Transform, RBF Kernel Principal Component Analysis, and Logistic Regression. IEEE Access 2016.
- Dong, L.; Wesseloo, J.; Potvin, Y.; Li, X. Discrimination of Mine Seismic Events and Blasts Using the Fisher Classifier, Naive Bayesian Classifier and Logistic Regression. Rock Mech. Rock Eng. 2016.
- Ortiz, J.P.; Valladolid, J.D.; Garcia, C.L.; Novillo, G.; Berrezueta, F. Analysis of machine learning techniques for the intelligent diagnosis of Ni-MH battery cells. In Proceedings of the 2018 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 14–16 November 2018; pp. 1–6.
More
Information
Subjects:
Engineering, Mechanical
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.6K
Revisions:
2 times
(View History)
Update Date:
16 Dec 2021
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No