 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Abdul Saboor | + 3077 word(s) | 3077 | 2021-05-26 09:49:42 | | | |
| 2 | Peter Tang | Meta information modification | 3077 | 2021-05-31 04:46:39 | | |
Video Upload Options
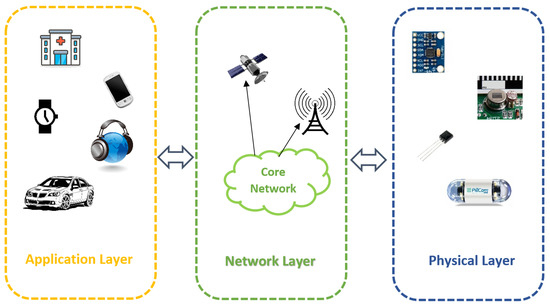
The rapid development in wireless technologies is positioning the Internet of Things (IoT) as an essential part of our daily lives. Localization is one of the most attractive applications related to IoT. In the past few years, localization has been gaining attention because of its applicability in safety, health monitoring, environment monitoring, and security.
1. Introduction
2. Review of Location Aware Schemes in IoT
|
References |
Indoor Localization |
Outdoor Localization |
Smartphone Localization |
Security |
Energy Efficiency |
Accuracy |
Target Recovery |
Target Prediction |
|---|---|---|---|---|---|---|---|---|
|
[24] |
✓ |
✓ |
✓ |
|||||
|
[25] |
✓ |
✓ |
✓ |
|||||
|
[26] |
✓ |
✓ |
✓ |
|||||
|
[27] |
✓ |
✓ |
✓ |
✓ |
✓ |
|||
|
[28] |
✓ |
✓ |
||||||
|
[29] |
✓ |
✓ |
✓ |
|||||
|
[30] |
✓ |
✓ |
✓ |
|||||
|
[31] |
✓ |
✓ |
✓ |
✓ |
✓ |
|||
|
[32] |
✓ |
✓ |
✓ |
|||||
|
[33] |
✓ |
✓ |
✓ |
✓ |
||||
|
[34] |
✓ |
✓ |
✓ |
✓ |
✓ |
|||
|
[35] |
✓ |
✓ |
✓ |
|||||
|
[36] |
✓ |
✓ |
✓ |
✓ |
✓ |
|||
|
[37] |
✓ |
✓ |
✓ |
✓ |
✓ |
|||
|
Ours |
✓ |
✓ |
✓ |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Name |
Overview |
|---|---|
|
Delaney et al. [38] |
This paper presents an energy efficient routing protocol using NHs model for tree structured WSN. Apart from energy efficiency, the proposed solution has the ability to present good results in a lossy network environment. |
|
Alaybeyoglu et al. [39] |
This paper presents an efficient tracking scheme for high speed targets. Additionally, the proposed scheme helps in reducing the target miss ratio during the whole tracking lifecycle. |
|
Mirsadeghi et al. [40] |
This paper presents an energy efficient prediction based target tracking scheme for WSN. The node closest to the object or with the highest energy is selected as a CH to prolong the network lifetime. |
|
Patil et al. [41] |
This paper presents an energy efficient WSHAN to improve the efficiency of target tracking target recovery. |
|
Rouhani et al. [42] |
This paper presents a solution to resolve the boundary target tracking issues using static clustering. The proposed solution is energy efficient, reasonably accurate and reliable in terms of target tracking. |
|
Wahdan et al. [43] |
This paper presents a hybrid solution of static networking clustering and dynamic CH. The dynamic CH uniformly utilize the energy of member SNs to prolong the network lifetime and prediction. |
|
Zhou et al. [44] |
This paper presents a fusion of MMA and PPHD for multi-target tracking in an urban area. Additionally, K-mean clustering is used to calculate the number of targets at any given time. The proposed scheme results in the tracking of dynamically changing unknown numbers of targets in urban areas. |
|
Amudha et al. [45] |
This paper presents a multi camera based scheme for target tracking. In this scheme, the camera near the mobile target is activated while all other cameras remain in a sleep state to conserve energy. In contrast, all the cameras are activated when a target is lost to improve the tracking. |
|
Bhowmik et al. [46] |
This paper presents an algorithm is to improve the overall coverage and target tracking. In addition to that, the proposed algorithm uses the FSM based RSSI tracking algorithm to make it more energy efficient. |
|
Jinan et al. [47] |
This paper presents a multi-model framework based on the PUESRF and JPDA. It results in improving the accuracy and precision of data that makes target tracking consistent. |
|
Darabkh et al. [48] |
This paper presents an adaptive CH algorithm with an aim to achieve a better target tracking by efficiently electing CH and cluster members. The proposed algorithm is energy efficiency and improves the network scalability. |
|
Khakpour et al. [49] |
This paper presents a fusion of DCTT and PCTT against vehicular tracking in a Vehicular Ad-hoc Network. To improve the target prediction, The DCTT performs in a distributed manner while PCTT is used for a centralized prediction algorithm. |
|
Joshi et al. [50] |
This paper presents a static cluster based target tracking for the prediction that is independent of wireless network architecture (homogenous or heterogeneous). The proposed scheme uses a linear prediction technique to calculate direction and speed to improve the target prediction. |
|
Xiao et al. [51] |
This paper presents a novel ASMT using Bayesian estimation to efficiently track multiple targets. The ASMT provides high accuracy, precision based multi-target tracking, less computation and solves the data association problem in WSN very efficiently by using location state and velocity state. |
|
Silva et al. [52] |
This paper presents an energy efficient scheme with the ability to detect and highlight the fake node positioning and bogus data flooding. |
|
Oracevic et al. [53] |
This paper presents a SRPTT algorithm to prevent the rouge SN from faking its location or flooding the bogus packets in a WSN. The SRPTT maintains a balance between security and mobile target tracking by employing a reputation concept. |
|
Alshamaa et al. [54] |
This paper presents a novel zoning based localization technique for indoor target tracking. The proposed technique develops a belief function by combining fingerprint based target observation and evidence associated with sensor mobility to improve the accuracy of target tracking. |
|
Chen et al. [55] |
This paper presents an adaptive extended kalman filter to remove and update the noise covariance. The proposed solution results in improving the accuracy and reliability of target tracking. |
|
Panag et al. [56] |
This paper presents a DHSCA to uniformly utilize sensors during the tracking. The proposed algorithm simplifies the set-up phase time of the network resulting in reducing the overhead of the network. |
|
Zhang et al. [57] |
This paper presents a dynamic clustering-based adaptive filtering scheme for target tracking in a WSN. The proposed scheme consists of two stages hierarchal data aggregation technique, which results in accurate and energy efficient target tracking. |
|
Qian et al. [58] |
This paper presents an AUKF algorithm to enhance the robustness and accuracy of the recovery mechanism. The AUKF fine-tunes the noise covariance matrix to increase the accuracy and robustness of the recovery mechanism. The vigorous scheduling of static and mobile SNs improves the tracking probability with less energy consumption. |
|
Zhang et al. [59] |
This paper presents an algorithm based on a hybrid sensor network to estimate the target region via static sensors. Additionally, a movement algorithm is presented for nodes to select the location. The proposed solution results in conserving the energy by reducing the target tracking sensors. |
|
Li et al. [60] |
This paper presents a sensor selection technique based on POMDP to reduce the sensor selection lagging. It results in improving the target tracking accuracy and reliability. |
|
Darabkh et al. [61] |
This paper presents an error and Energy-aware cluster head selection algorithm to improve the target localization. The proposed algorithm improves energy consumption and simplifies the selection of cluster members. Additionally, it reduces the packets overhead by minimizing the transmission of control messages. |
|
Liu et al. [62] |
This paper presents energy efficient scheme with low prediction accuracy. Apart from energy efficiency, it reduces the target miss rate probability. |
|
Luo et al. [63] |
This paper presents a scheme to improve the target tracking for an indoor environment using a CLTA. |
|
Yu et al. [64] |
This paper presents a mobile node-based target tracking scheme to enhance the target tracking accuracy and transmission reliability. |
|
Vallas et al. [65] |
This paper presents a Gaussian filter-based multi-sigma point filter to reduce the curse of dimensionality in high dimension systems. Furthermore, it improves the efficiency of tracking the multiple targets in a WSN. |
|
Ghodousi et al. [66] |
This paper presents an energy efficient tracking scheme using ARIMA and UKF. The ARIMA, after observing target in equal interval, predicts its future location while UKF estimates the target location. The proposed scheme preserves the energy of SNs and improves the network lifetime. |
|
Liang et al. [67] |
This paper presents a trust-based distributed KF scheme for secure and reliable target tracking. |
|
Khan et al. [68] |
This paper presents a dynamic clustering-based verifiable multi iteration scheme to improve target tracking. The proposed scheme improves the accuracy and reliability of tracking. |
|
Liu et al. [69] |
This paper presents an object localization scheme to provide better localization results on the sequences undergoing shape deformation and illumination changes. |
|
Nguyen et al. [70] |
This paper presents a solution to improve the accuracy of target tracking in harsh radio environments. The proposed scheme is efficient in both indoor and outdoor environments. |
|
Ullah et al. [71] |
This paper presents an underwater target tracking scheme intending to achieve energy efficiency and tracking accuracy. |
|
Alberto et al. [72] |
This paper presents a multi-model tracking system by unifying fingerprint-based tracking with neural networks. The proposed system also employs a Gaussian outliers filter with neural networks to further improve the tracking accuracy. |
|
Liu et al. [73] |
This paper presents a scheme for tracking multiple targets in a harsh environment accurately and precisely. |
|
Liu et al. [74] |
This paper presents an AFS for accurate and efficient target tracking. The proposed scheme is robust and fault-tolerant with a low target loss rate. Moreover, PSO is used to fine-tune and improve the overall tracking performance. |
|
Mahmoudreza et al. [75] |
This paper presents a solution to tackle the multiple target tracking problems with accurate data association. It results in the prevention of false alarms. |
|
Li et al. [76] |
This paper presents a hybrid solution to provide accurate and reliable localization in harsh manufacturing workshops. |
|
Reisinger et al. [77] |
This paper presents an IMM tracking scheme unified with UKF to track the targets efficiently. |
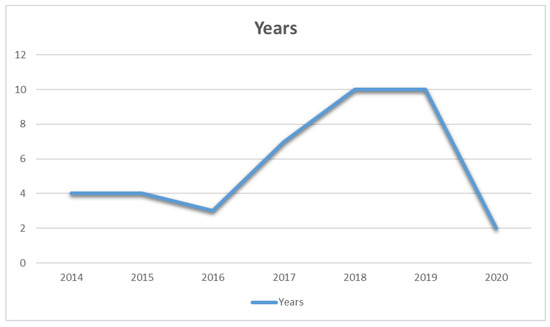
2.1. Distribution Based on Publishing Year
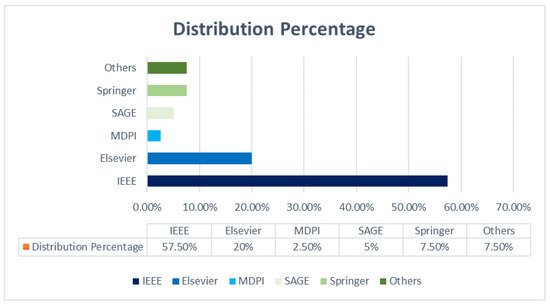
2.2. Distribution Based on Publication Venue
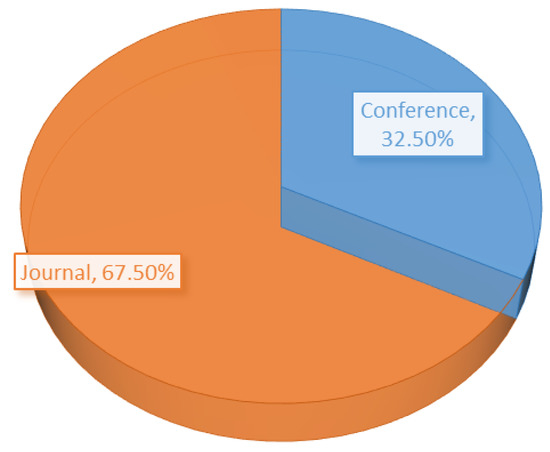
2.3. Distribution Based on Publication Type
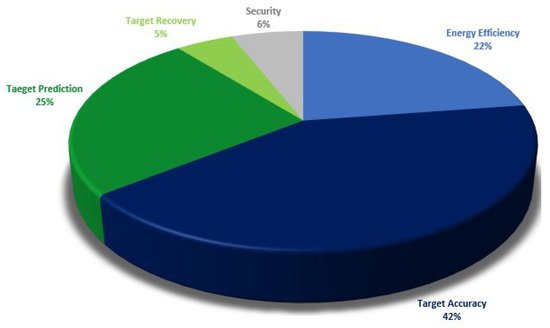
2.4. Analysis Based on Localization KPIs
|
Name |
Energy Efficiency |
Localization Accuracy |
Target Prediction |
Target Recovery |
Security |
|---|---|---|---|---|---|
|
Delaney et al. [38] |
✓ |
||||
|
Alaybeyoglu et al. [39] |
✓ |
✓ |
✓ |
||
|
Mirsadeghi et al. [40] |
✓ |
✓ |
✓ |
||
|
Patil et al. [41] |
✓ |
✓ |
✓ |
✓ |
|
|
Rouhani et al. [42] |
✓ |
✓ |
|||
|
Wahdan et al. [43] |
✓ |
✓ |
✓ |
||
|
Zhouet al. [44] |
✓ |
✓ |
|||
|
Amudha et al. [45] |
✓ |
✓ |
✓ |
||
|
Bhowmik et al. [46] |
✓ |
✓ |
|||
|
Jinan et al. [47] |
✓ |
✓ |
|||
|
Darabkh et al. [48] |
✓ |
✓ |
✓ |
||
|
Khakpour et al. [49] |
✓ |
✓ |
|||
|
Joshi et al. [50] |
✓ |
✓ |
|||
|
Xiao et al. [51] |
✓ |
||||
|
Silva et al. [52] |
✓ |
✓ |
✓ |
||
|
Oracevic et al. [53] |
✓ |
✓ |
✓ |
||
|
Alshamaa et al. [54] |
✓ |
||||
|
Chen et al. [55] |
✓ |
✓ |
|||
|
Panag et al. [56] |
✓ |
||||
|
Zhang et al. [57] |
✓ |
✓ |
|||
|
Qian et al. [58] |
✓ |
✓ |
|||
|
Zhang et al. [59] |
✓ |
✓ |
|||
|
Li et al. [60] |
✓ |
✓ |
|||
|
Darabkh et al. [61] |
✓ |
✓ |
|||
|
Liu et al. [62] |
✓ |
✓ |
✓ |
||
|
Luo et al. [63] |
✓ |
||||
|
Yu et al. [64] |
✓ |
✓ |
|||
|
Vallas et al. [65] |
✓ |
✓ |
|||
|
Ghodousi et al. [66] |
✓ |
✓ |
✓ |
||
|
Liang et al. [67] |
✓ |
✓ |
|||
|
Khan et al. [68] |
✓ |
✓ |
✓ |
||
|
Liu et al. [69] |
✓ |
✓ |
|||
|
Nguyen et al. [70] |
✓ |
||||
|
Ullah et al. [71] |
✓ |
✓ |
|||
|
Alberto et al. [72] |
✓ |
||||
|
Liu et al. [73] |
✓ |
||||
|
Liu et al. [74] |
✓ |
✓ |
✓ |
||
|
Mahmoudreza et al. [75] |
✓ |
✓ |
|||
|
Li et al. [76] |
✓ |
||||
|
Reisinger et al. [77] |
✓ |
✓ |
|
Ref. |
Proposed Approach |
Network Structure |
Number of Targets |
Performance Parameters |
Tool |
|---|---|---|---|---|---|
|
[38] |
ETX-NH |
Tree |
Single |
PDR: 96% |
TOSSIM |
|
[39] |
PF-DLSTA |
Tree |
Single |
N/A |
NS2 |
|
[40] |
Low Power Target Prediction Mechanism |
Dynamic Cluster |
Single |
MR: 0.69% |
N/A |
|
[41] |
WSHAN |
Dynamic Cluster |
Single |
EE: 37% |
MATLAB |
|
[42] |
BCTT |
Static Cluster |
Single |
EE: 48% |
Omnet++ |
|
[43] |
SCDCH |
Static Cluster |
Single |
N/A |
MATLAB |
|
[44] |
PPHD-MMA |
Dynamic Cluster |
Multiple |
N/A |
N/A |
|
[45] |
VGTR |
Dynamic Cluster |
Single |
TMR: 99% reduction |
MATLAB |
|
[46] |
DCTC with Fuzzy Sensing |
Tree |
Single |
N/A |
TinyOS and nesC |
|
[47] |
JPDA, PUESRF |
Dynamic Cluster |
Multiple |
N/A |
N/A |
|
[48] |
IPAH |
Dynamic Cluster |
Single |
EE: 40% improved, LE: 52% improved |
MATLAB |
|
[49] |
DCTT, PCTT |
Static Cluster |
Single |
N/A |
NS2 + TOSSIM |
|
[50] |
Prediction based object tracking algorithm |
Static Cluster |
Single |
PA: 99% |
NS2 |
|
[51] |
ASMT |
Static Cluster |
Multiple |
FR: >14% |
N/A |
|
[52] |
GTPM |
Dynamic Cluster |
Single |
N/A |
NS2 |
|
[53] |
SRPTT |
Static Cluster |
Single |
N/A |
Java Simulator |
|
[54] |
Extended observation model, 2nd mobility model |
Static Cluster |
Single |
N/A |
N/A |
|
[55] |
AEKF |
Static Cluster |
Single |
RMSE: 32.53% |
N/A |
|
[56] |
DHSCA |
Static Cluster |
Single |
N/A |
Fortran PowerStation 4.0 |
|
[57] |
ACDF |
Dynamic Cluster |
Single |
N/A |
N/A |
|
[58] |
AUKF |
Static Cluster |
Single |
N/A |
MATLAB |
|
[59] |
HNTA |
Hybrid Cluster |
Multiple |
N/A |
N/A |
|
[60] |
Adaptive sensor selection algorithm with POMDP |
Dynamic Cluster |
Multiple |
N/A |
N/A |
|
[61] |
EEA-IAH |
Dynamic Cluster |
Single |
N/A |
MATLAB |
|
[62] |
LPPT |
Static Cluster |
Single |
Reduce MR: 36.34%, EE: 5.2 times |
Omnet++ |
|
[63] |
CLTA |
Dynamic Cluster |
Single |
LE: 0.65 m |
MATLAB |
|
[64] |
FTS |
Tree |
Single |
LE: >50 improvement |
MATLAB |
|
[65] |
DMGIF |
Dynamic Cluster |
Multiple |
N/A |
N/A |
|
[66] |
ARIMA, AUKF |
Dynamic Cluster |
Single |
N/A |
Opnet + MATLAB |
|
[67] |
Trust-based distributed Kalman filtering. |
Dynamic Cluster |
Single |
N/A |
N/A |
|
[68] |
Dynamic cooperative multilateral sensing |
Dynamic Cluster |
Single |
LE: 19% improved |
MATLAB |
|
[69] |
ELM compressive sensing |
Dynamic Cluster |
Single |
N/A |
MATLAB |
|
[70] |
LEMon, LEMon-M |
Static Cluster |
Single |
Outdoor and Indoor LE: 10 m and 2 m improved |
N/A |
|
[71] |
Distance and angle-based localization |
Dynamic Cluster |
Single |
LE: 90% improved, ABL: 104.9 m |
N/A |
|
[72] |
SWiBluX |
Dynamic Cluster |
Single |
LE: 45% improved |
N/A |
|
[73] |
TS PM-PHD |
Dynamic Cluster |
Multiple |
N/A |
N/A |
|
[74] |
AFS for MC-SSN |
Tree |
Single |
LE: <0.2% |
N/A |
|
[75] |
AIE-MCMCDA |
Dynamic Cluster |
Multiple |
LE: 0.39–4.12% |
N/A |
|
[76] |
CS-BnB, BnB-AMCL |
Dynamic Cluster |
Single |
LE: 0.005 m/0.111 deg |
4WS4WDr |
|
[77] |
IMM, UKF |
Dynamic |
Multiple |
EE: 4 times |
N/A |
References
- Castellacci, F.; Viñas-Bardolet, C. Internet use and job satisfaction. Comput. Hum. Behav. 2019, 90, 141–152.
- Scheerder, A.J.; van Deursen, A.J.A.M.; van Dijk, J.A.G.M. Negative outcomes of Internet use: A qualitative analysis in the homes of families with different educational backgrounds. Inf. Soc. 2019, 35, 286–298.
- World Internet Users Statistics and 2020 World Population Stats. Internet World Stats. 2020. Available online: (accessed on 29 March 2021).
- Yaqoob, I.; Hashem, I.A.T.; Ahmed, A.; Kazmi, S.A.; Hong, C.S. Internet of things forensics: Recent advances, taxonomy, requirements, and open challenges. Future Gener. Comput. Syst. 2019, 92, 265–275.
- Srinivasan, C.; Rajesh, B.; Saikalyan, P.; Premsagar, K.; Yadav, E. A review on the different types of internet of things (IoT). J. Adv. Res. Dyn. Control. Syst. 2019, 11, 154–158.
- Jagannath, J.; Polosky, N.; Jagannath, A.; Restuccia, F.; Melodia, T. Machine learning for wireless communications in the Internet of Things: A comprehensive survey. Ad Hoc Netw. 2019, 93, 101913.
- Malik, H.; Alam, M.M.; Pervaiz, H.; Le Moullec, Y.; Al-Dulaimi, A.; Parand, S.; Reggiani, L. Radio resource management in NB-IoT systems: Empowered by interference prediction and flexible duplexing. IEEE Netw. 2019, 34, 144–151.
- Khan, S.Z.; Malik, H.; Sarmiento, J.L.R.; Alam, M.M.; Le Moullec, Y. Dorm: Narrowband iot development platform and indoor deployment coverage analysis. Procedia Comput. Sci. 2019, 151, 1084–1091.
- Kumar, D.P.; Amgoth, T.; Annavarapu, C.S.R. Machine learning algorithms for wireless sensor networks: A survey. Inf. Fusion 2019, 49, 1–25.
- Shafique, K.; Khawaja, B.A.; Sabir, F.; Qazi, S.; Mustaqim, M. Internet of Things (IoT) for Next-Generation Smart Systems: A Review of Current Challenges, Future Trends and Prospects for Emerging 5G-IoT Scenarios. IEEE Access 2020, 8, 23022–23040.
- Cisco Annual Internet Report-Cisco Annual Internet Report (2018–2023) White Paper. Available online: (accessed on 29 March 2021).
- Hassija, V.; Chamola, V.; Saxena, V.; Jain, D.; Goyal, P.; Sikdar, B. A Survey on IoT Security: Application Areas, Security Threats, and Solution Architectures. IEEE Access 2019, 7, 82721–82743.
- Hamdan, O.; Shanableh, H.; Zaki, I.; Al-Ali, A.R.; Shanableh, T. IoT-Based Interactive Dual Mode Smart Home Automation. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–2.
- Trappey, A.J.C.; Trappey, C.V.; Govindarajan, U.H.; Sun, J.J.H. Patent Value Analysis Using Deep Learning Models—The Case of IoT Technology Mining for the Manufacturing Industry. IEEE Trans. Eng. Manag. 2019, 1–13.
- Saleem, Y.; Crespi, N.; Rehmani, M.H.; Copeland, R. Internet of Things-Aided Smart Grid: Technologies, Architectures, Applications, Prototypes, and Future Research Directions. IEEE Access 2019, 7, 62962–63003.
- Saboor, A.; Mustafa, A.; Ahmad, R.; Khan, M.A.; Haris, M.; Hameed, R. Evolution of Wireless Standards for Health Monitoring. In Proceedings of the 2019 9th Annual Information Technology, Electromechanical Engineering and Microelectronics Conference (IEMECON), Jaipur, India, 13–15 March 2019; pp. 268–272.
- Tang, J.; So, D.K.C.; Zhao, N.; Shojaeifard, A.; Wong, K. Energy Efficiency Optimization with SWIPT in MIMO Broadcast Channels for Internet of Things. IEEE Internet Things J. 2018, 5, 2605–2619.
- Zaidan, A.; Zaidan, B. A review on intelligent process for smart home applications based on IoT: Coherent taxonomy, motivation, open challenges, and recommendations. Artif. Intell. Rev. 2020, 53, 141–165.
- Rahman, A.; Li, T.; Wang, Y. Recent advances in indoor localization via visible lights: A survey. Sensors 2020, 20, 1382.
- Elbes, M.; Alrawashdeh, T.; Almaita, E.; AlZu’bi, S.; Jararweh, Y. A platform for power management based on indoor localization in smart buildings using long short-term neural networks. Trans. Emerg. Telecommun. Technol. 2020, e3867.
- Giri, A.; Dutta, S.; Neogy, S. Fuzzy logic-based range-free localization for wireless sensor networks in agriculture. In Advanced Computing and Systems for Security; Springer: Singapore, 2020; pp. 3–12.
- McAllister, T.D.; El-Tawab, S.; Heydari, M.H. Localization of Health Center Assets Through an IoT Environment (LoCATE). In Proceedings of the 2017 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 28 April 2017; pp. 132–137.
- Song, Y.; Zhang, X.; Zhang, M.; Wang, J. Research of node localization algorithm based on wireless sensor networks in marine environment monitoring. J. Comput. Methods Sci. Eng. 2018, 18, 69–83.
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599.
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346.
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79.
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644.
- Liu, M.; Cheng, L.; Qian, K.; Wang, J.; Wang, J.; Liu, Y. Indoor acoustic localization: A survey. Hum. Centric Comput. Inf. Sci. 2020, 10, 2.
- Jang, B.; Kim, H. Indoor positioning technologies without offline fingerprinting map: A survey. IEEE Commun. Surv. Tutor. 2018, 21, 508–525.
- Vo, Q.D.; De, P. A survey of fingerprint-based outdoor localization. IEEE Commun. Surv. Tutor. 2015, 18, 491–506.
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A survey of positioning systems using visible LED lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988.
- Do, T.H.; Yoo, M. An in-depth survey of visible light communication based positioning systems. Sensors 2016, 16, 678.
- Ferreira, A.F.G.; Fernandes, D.M.A.; Catarino, A.P.; Monteiro, J.L. Localization and positioning systems for emergency responders: A survey. IEEE Commun. Surv. Tutor. 2017, 19, 2836–2870.
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. (CSUR) 2016, 49, 1–31.
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370.
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781.
- Jadaa, K.J.; Kamarudin, L.M.; Ahmad, R.B. Detection and Tracking Survey for Smart Home Using Wireless Sensor Network. J. Eng. Appl. Sci 2019, 14, 3119–3129.
- Delaney, D.T.; Higgs, R.; O’Hare, G.M. A stable routing framework for tree-based routing structures in WSNs. IEEE Sens. J. 2014, 14, 3533–3547.
- Alaybeyoglu, A.; Kantarci, A.; Erciyes, K. A dynamic lookahead tree based tracking algorithm for wireless sensor networks using particle filtering technique. Comput. Electr. Eng. 2014, 40, 374–383.
- Mirsadeghi, M.; Mahani, A. Low power prediction mechanism for wsn-based object tracking. Procedia Technol. 2014, 17, 692–698.
- Gupta, A.; Patil, S.; Zaveri, M. Lost target recovery in wireless sensor network using tracking. In Proceedings of the 2012 International Conference on Communication Systems and Network Technologies, Rajkot, Gujarat, India, 11–13 May 2012; pp. 352–356.
- Rouhani, S.; Haghighat, A.T. Boundary static clustering target tracking in wirless sensor networks. In Proceedings of the 2015 6th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Dallas-Fortworth, TX, USA, 13–15 July 2015; pp. 1–6.
- Wahdan, M.A.; Al-Mistarihi, M.F.; Shurman, M. Static cluster and dynamic cluster head (SCDCH) adaptive prediction-based algorithm for target tracking in wireless sensor networks. In Proceedings of the 2015 38th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 25–29 May 2015; pp. 596–600.
- Zhou, M.; Zhang, J.J.; Papandreou-Suppappola, A. Multiple target tracking in urban environments. IEEE Trans. Signal Process. 2015, 64, 1270–1279.
- Amudha, J.; Arpita, P. Multi-Camera Activation Scheme for Target Tracking with Dynamic Active Camera Group and Virtual Grid-Based Target Recovery. Procedia Comput. Sci. 2015, 58, 241–248.
- Bhowmik, S.; Das, S.; Giri, C. Tree based tracking target in wireless sensor network. In Proceedings of the 2016 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Jaipur, India, 21–24 September 2016; pp. 390–397.
- Jinan, R.; Raveendran, T. Particle filters for multiple target tracking. Procedia Technol. 2016, 24, 980–987.
- Darabkh, K.A.; Albtoush, W.Y.; Jafar, I.F. Improved clustering algorithms for target tracking in wireless sensor networks. J. Supercomput. 2017, 73, 1952–1977.
- Khakpour, S.; Pazzi, R.W.; El-Khatib, K. Using clustering for target tracking in vehicular ad hoc networks. Veh. Commun. 2017, 9, 83–96.
- Joshi, P.; Joshi, A. Prediction Based Moving Object Tracking in Wireless Sensor Network. Int. Res. J. Eng. Technol. 2017, 4, 3365–3368.
- Xiao, K.; Wang, R.; Zhang, L.; Li, J.; Fun, T. ASMT: An augmented state-based multi-target tracking algorithm in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717703115.
- Silva, A.; Zhou, F.; Pontes, E.; Simplicio, M.A.; Aguiar, R.; Guelfi, A.; Kofuji, S. Energy-efficient node position identification through payoff matrix and variability analysis. Telecommun. Syst. 2017, 65, 459–477.
- Oracevic, A.; Akbas, S.; Ozdemir, S. Secure and reliable object tracking in wireless sensor networks. Comput. Secur. 2017, 70, 307–318.
- Alshamaa, D.; Mourad-Chehade, F.; Honeine, P. Tracking of mobile sensors using belief functions in indoor wireless networks. IEEE Sens. J. 2017, 18, 310–319.
- Chen, Y.M.; Tsai, C.L.; Fang, R.W. TDOA/FDOA mobile target localization and tracking with adaptive extended Kalman filter. In Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics & Optimization (ICCAIRO), Prague, Czech Republic, 20–22 May 2017; pp. 202–206.
- Panag, T.S.; Dhillon, J. Dual head static clustering algorithm for wireless sensor networks. AEU Int. J. Electron. Commun. 2018, 88, 148–156.
- Zhang, H.; Zhou, X.; Wang, Z.; Yan, H.; Sun, J. Adaptive consensus-based distributed target tracking with dynamic cluster in sensor networks. IEEE Trans. Cybern. 2018, 49, 1580–1591.
- Qian, H.; Fu, P.; Li, B.; Liu, J.; Yuan, X. A novel loss recovery and tracking scheme for maneuvering target in hybrid WSNs. Sensors 2018, 18, 341.
- Zhang, C.; Fei, S. A Movement Algorithm for Target Group Tracking in Wireless Sensor Networks. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7226–7230.
- Li, W.; Han, C. A Novel Sensor Selection Algorithm for Multi-Target Tracking in Wireless Sensor Networks. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2854–2858.
- Darabkh, K.A.; Alsaraireh, N.R. A yet efficient target tracking algorithm in wireless sensor networks. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals & Devices (SSD), Yasmine Hammamet, Tunisia, 19–22 March 2018; pp. 7–11.
- Liu, A.; Zhao, S. High-performance target tracking scheme with low prediction precision requirement in WSNs. Int. J. Ad Hoc Ubiquitous Comput. 2018, 29, 270–289.
- Luo, J.; Zhang, Z.; Liu, C.; Luo, H. Reliable and cooperative target tracking based on WSN and WiFi in indoor wireless networks. IEEE Access 2018, 6, 24846–24855.
- Yu, X.; Liang, J. Genetic fuzzy tree based node moving strategy of target tracking in multimodal wireless sensor network. IEEE Access 2018, 6, 25764–25772.
- Vilà-Valls, J.; Closas, P.; Bugallo, M.F.; Míguez, J. Distributed Multiple Gaussian Filtering for Multiple Target Localization in Wireless Sensor Networks. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 1439–1443.
- Izadi-Ghodousi, Z.; Hosseinpour, M.; Safaei, F.; Mohajerzadeh, A.H.; Alishahi, M. An Efficient Target Tracking in Directional Sensor Networks Using Adapted Unscented Kalman Filter. Wirel. Pers. Commun. 2019, 109, 1925–1954.
- Liang, C.; Wen, F.; Wang, Z. Trust-based distributed Kalman filtering for target tracking under malicious cyber attacks. Inf. Fusion 2019, 46, 44–50.
- Khan, M.A.; Khan, M.A.; Rahman, A.U.; Malik, A.W.; Khan, S.A. Exploiting cooperative sensing for accurate target tracking in industrial Internet of things. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719892203.
- Liu, E.; Chu, Y.; Zheng, L. Object Tracking Based on Compressive Features and Extreme Learning Machine. IEEE Access 2019, 7, 45994–46003.
- Nguyen, C.L.; Raza, U. LEMOn: Wireless Localization for IoT Employing a Location-Unaware Mobile Unit. IEEE Access 2019, 7, 40488–40502.
- Ullah, I.; Liu, Y.; Su, X.; Kim, P. Efficient and accurate target localization in underwater environment. IEEE Access 2019, 7, 101415–101426.
- Belmonte-Hernández, A.; Hernández-Peñaloza, G.; Gutiérrez, D.M.; Álvarez, F. SWiBluX: Multi-Sensor Deep Learning Fingerprint for precise real-time indoor tracking. IEEE Sens. J. 2019, 19, 3473–3486.
- Liu, L.; Ji, H.; Zhang, W.; Liao, G. Multi-sensor multi-target tracking using probability hypothesis density filter. IEEE Access 2019, 7, 67745–67760.
- Liu, Q.; Lin, J.; Mao, Y. Adaptive Fuzzy Tree System for Target Tracking in Mission Critical Sensor Networks. IEEE Access 2019, 7, 184676–184685.
- Mahmoudreza, H.; Hamid, K.; Mohammadtaghi, B. Augmented input estimation in multiple maneuvering target tracking. J. Syst. Eng. Electron. 2019, 30, 841–851.
- Li, G.; Huang, Y.; Zhang, X.; Liu, C.; Shao, W.; Jiang, L.; Meng, J. Hybrid Maps Enhanced Localization System for Mobile Manipulator in Harsh Manufacturing Workshop. IEEE Access 2020, 8, 10782–10795.
- Fruhwirth-Reisinger, C.; Krispel, G.; Possegger, H.; Bischof, H. Towards Data-driven Multi-target Tracking for Autonomous Driving. In Proceedings of the 25th Computer Vision Winter Workshop (CVWW), Rogaska Slatina, Slovenia, 3–5 February 2020.

