 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Antonio J Torija Martinez | + 3000 word(s) | 3000 | 2021-01-26 07:29:44 | | | |
| 2 | Camila Xu | Meta information modification | 3000 | 2021-02-04 05:10:31 | | | | |
| 3 | Camila Xu | Meta information modification | 3000 | 2021-02-04 05:10:49 | | |
Video Upload Options
Unmanned Aerial Vehicles (UAVs), commonly called “drones”, are a class of aircraft that can fly without the onboard presence of pilots. They vary in type (e.g. fixed wing vs. multi-rotor) and size (from a few grams to hundreds of kilograms). These vehicles are intended for a variety of applications, including transport and logistics, monitoring and surveillance, and media and telecommunications.
1. Introduction
The long-term strategy to decarbonise transport is driving a revolution in the aviation sector. A number of electric and autonomous aerial technologies are currently under development, from Unmanned Aerial Vehicles (UAVs), commonly called “drones”, to regional/short haul hybrid electric aircraft. These novel aerial technologies can be classified as (1) UAVs, varying in size (from a few grams to hundred kilograms) and type (e.g., fixed wing vs. multi-rotors), with unlimited applications from parcel delivery to survey and search and rescue; (2) Urban Air Mobility, to transport people within cities—these vehicles are expected to be based on electric Vertical Takeoff and Landing (eVTOL) technology; and (3) electric/hybrid electric aircraft for regional to short-haul routes. This paper focused on UAVs, as the aerial technology most likely to be widely adopted. Notwithstanding this, the findings and discussion of this paper could be applicable to all three categories above.
Schäfer et al. [1] discussed how a transition to all-electric aircraft might significantly reduce the environmental impacts of aviation, e.g., eliminate direct combustion emissions and thus remove associated direct CO2 and non-CO2 warming. According to these authors, the adoption of all-electric, narrow-body aircraft will not take place without a significant advance in battery technology. However, battery-operated UAVs have been proposed as a sustainable aerial transportation system able to significantly reduce the carbon footprint in cargo transport and parcel delivery [2][3]. Elsayed and Mohamed [4] found that parcel delivery using UAVs produces lower greenhouse gas (GHG) emissions than ground delivery per parcel-km (although compared to electric vehicles, UAVs showed only slightly lower GHG emissions for deliveries in urban areas and 30% more GHG emissions in rural areas). UAVs could also bring important societal benefits, such as urgent medical deliveries [5].
The expansion of the UAV sector requires building knowledge and also overcoming some important challenges for their integration into the existing aviation airspace, infrastructure and aviation systems. Some of these challenges are (1) regulation; (2) vehicle testing and certification; (3) operational safety; (4) vehicle-to-vehicle communication; (5) cybersecurity; (6) energy sources; (7) airspace management; (8) new infrastructure; (9) developing new business markets; (10) standardisation of noise assessment; (11) human response to noise and visual pollution; and (12) public acceptance [6].
The noise generated by UAV operations will certainly alter existing soundscapes [7]. UAVs generate an unconventional noise signature, which does not qualitatively resemble conventional aircraft noise [8]. This is a source of noise that people have not before encountered, and that will likely impact communities not currently exposed to aircraft noise. For these reasons, it is widely accepted that noise is one of the main limiting factors for public acceptance and adoption of UAVs. It is unquestionable that, if not addressed appropriately, noise produced by UAVs could lead to important tension with exposed communities, therefore putting at risk the significant environmental and societal benefits UAVs might bring.
2. Drone Noise
UAVs are expected to be quieter than conventional aircraft. In a recent study carried out by Read et al. [9], the A-weighted maximum noise level normalized to a distance of 400 ft (LA,max at 400 ft) for four small- to medium-size UAVs ranges from 50.1 dB(A) to 64.1 dB(A) (mean = 55.1 dB(A), standard deviation = 6.2 dB(A)). These four vehicles are the Skywalker X-8 (fixed wing of 3 Kg), DJI M200 (quadcopter of 6.1 Kg), Yuneed Typhoon (hexcopter of 2.4 Kg) and GD28X (octocopter of 20.4 Kg); and the operation measured was a fast, level flyover over the microphone. According to the Aircraft Noise and Performance (ANP) database [10], at 400 ft, the average LA,max of a conventional Airbus A320 (CFM56-5A1 engine) and Boeing 737-8MAX (CFM Leap1B-27 engine) is 95.6 dB(A) (SD = 2.9 dB(A)) and 90.1 dB(A) (SD = 3.1 dB(A)), respectively. Note that these average values of LA,max are for takeoff operations with a power setting ranging from 12,000 lbf to 22,500 lbf (Airbus A320), and from 10,000 lbf to 24,500 lbf (Boeing 737-8MAX).
Aircraft only fly at 400 ft height above the ground at distances closed to the boundaries of an airport. Focusing on takeoff operations, a given aircraft will accelerate from the Start-of-Roll (SOR) point and climb to a cruise altitude (usually about 30,000 ft). The flight (vertical) flight profile will depend on the specific aircraft and Maximum Takeoff Mass (MTOM). In order to assess the possible range of aircraft noise levels at communities living around airports, the LA,max values at two distances (i.e., 10 km and 25 km) from the SOR point are shown for both an Airbus A320 and Boeing 737-8MAX in Table 1.
Table 1. LA,max values at 10 km and 25 km from the Start-of-Roll (SOR) point for both an Airbus A320 and Boeing 737-8MAX.
| Aircraft | Distance from SOR Point (km) | Height about Ground (ft) 1 | LA,max 2 |
|---|---|---|---|
| A320 | 10 | 2400 | 73.4 dB(A) (SD = 4.3 dB(A)) |
| 737-8MAX | 10 | 2200 | 71.9 dB(A) (SD = 3.0 dB(A)) |
| A320 | 25 | 6500 | 60.2 dB(A) (SD = 4.6 dB(A)) |
| 737-8MAX | 25 | 7500 | 55.6 dB(A) (SD = 3.3 dB(A)) |
1 Estimated using the A320 and B737-800 height profiles in [11]. 2 Average values of LA,max for takeoff operations with the power setting ranging from 12,000 lbf to 22,500 lbf (Airbus A320), and from 10,000 lbf to 24,500 lbf (Boeing 737-8MAX).
However, compared to conventional aircraft, UAVs will operate much closer to the ground. For instance, the “open category” of UAVs are limited to operations in the visual line of sight (VLOS), below 120 m (or 400 ft) altitude [12]. Figure 1 shows the differences in frequency spectra between two UAVs (DJI M200 and Yuneec Typhoon [9]) and two conventional civil aircraft (Boeing 737 MAX 8 and Airbus A320). Note that the frequency spectra were normalised to 65 dB(A) to ease the visualisation of such differences. The Boeing 737-8MAX and Airbus A320 aircraft were recorded at a location approximately 900 m from the end of the south runway of Heathrow airport (approx. 4.5 km from the SOR point), during takeoff operations. The height of the aircraft passing over the measurement point was estimated as 435.2 ± 57.4 m [13]. The DJI Matrice 200 and Yuneec Typhoon UAVs were recorded during level flyover at a 150 ft (i.e., 45.7 m) nominal height above the microphone.
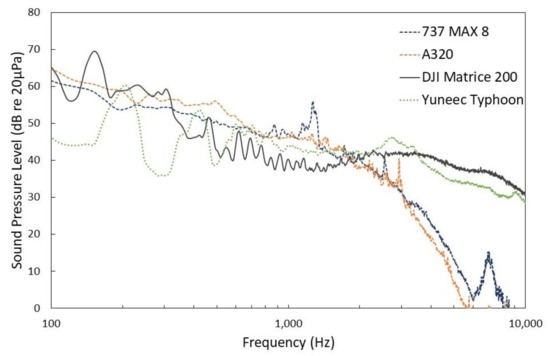
Figure 1. Frequency spectra of two conventional aircraft (Airbus A320 and Boeing 737-8MAX) and two multi-copter Unmanned Aerial Vehicles (DJI M200 and Yuneec Typhoon [9]). Frequency spectra normalised to 65 dB(A).
As shown in Figure 1, small to medium UAVs are characterised by significant sound radiation at high frequencies. For conventional fixed-wing aircraft, a significant attenuation of high frequencies is observed due to atmospheric absorption in the long-range propagation. As stated by Gwak et al. [14], one of the critical differences between the sound generated by UAVs and conventional civil aircraft is the concentration of acoustic energy in the high frequency region. This, added to the reduced effect of atmospheric absorption due to the closed proximity between the vehicle and receiver, seems to indicate that high frequency noise is likely to be an important factor for noise annoyance due to UAV operations [15].
The high frequency noise content of UAVs can be observed in Figure 2. As seen in this figure, both UAVs (i.e., DJI M200 and Yuneec Typhoon) radiate significant high frequency noise (especially between 2 kHz and 4 kHz). This high frequency noise can be explained by blade self-noise phenomena, including turbulent boundary layer trailing edge noise [16], interactions between adjacent rotors [15] and the electric motors due to force pulses as the magnets and armature interact [17].
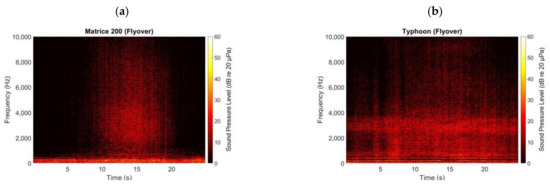
Figure 2. Spectrogram of the DJI M200 (a) and Yuneec Typhoon (b) UAVs flying over at ~50 m (~150 ft) altitude above the microphone [9].
The sound produced by UAVs is mainly tonal in character, with the multiple complex tones at the harmonics of the blade passage frequency (BPF) of each rotor [14][15][16][17][18]. This can be observed in Figure 1 and Figure 3 for both of the UAVs considered in this paper. In Figure 3, for the DJI M200 UAV (quadcopter), two spectral lines corresponding to the BPFs of the two sets of rotors are observed at 120 and 140 Hz. For the Yuneec Typhoon UAV (hexcopter), spectral lines corresponding to the rotors’ BPFs are clustered at about 200 Hz. Harmonics at these BPFs are also observed in Figure 3 (more clearly for the Yuneec Typhoon UAV).
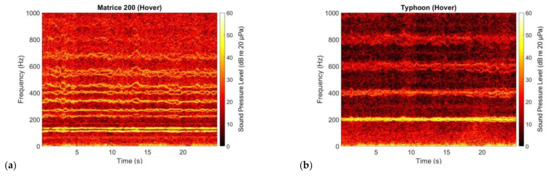
Figure 3. Spectrogram of the DJI M200 (a) and Yuneec Typhoon (b) UAVs hovering at ~1.2 m (~4 ft) altitude above the microphone [9].
As described by Alexander et al. [19], ambient weather conditions influence the level, frequency composition and temporal characteristics of the sound produced by UAVs. In order to compensate for wind gusts, UAV rotors vary their rotational speed to maintain vehicle stability [15][16]. This leads to an unsteady acoustic signature with rapid temporal fluctuations of the tonal components. The changes in rotor rotational speeds, due to minor variations in the blade and motor properties, and offsets to the UAV centre of gravity also lead to a decrease in the maximum amplitudes of the tonal components and a dispersion of the spectral lines at higher harmonics of the BPFs [15][17].
For all these reasons, authors like Christian and Cabell [8] have suggested that the sound produced by drones does not resemble qualitatively the sound generated by contemporary civil aircraft. Torija and Li [18] have found that even with the same LAeq (65 dBA), the preference of the sounds of a small quadcopter was 33% lower than the preference of sound of conventional civil aircraft.
3. Regulation and Metrics
The current regulation for noise certification of civil aviation seems to be inadequate for capturing the noise features (and cover operational characteristics) of UAVs [20]. Senzing and Marsan [20] discussed the main limitations of the noise certification methods for fixed-wind and rotary-wing aircraft to be applied for UAV vehicles. For instance, certification methods for conventional fixed-wing aircraft assume primary noise effects close to an airport, while for UAVs the noise during en-route operations might be a significant issue due to the closer proximity of UAVs to people.
To address this issue, the European Commission has issued the Implementing Regulation 2019/945 [21]. This regulation is only of application for the “open” category, i.e., a UAV with an MTOM lower than 25 kg. The Annex Part 15 of this regulation presents the maximum A-weighted sound power level (LwA,max) per class of UAV (note that LwA,max values are also provided for classes C1 and C2 [12]). The measurement procedure is based on the ISO 3744:2010 [22], and therefore requests the determination (in anechoic chambers) of the sound power levels under free field conditions over a reflecting plane. This test method has been criticised as insufficient and non-optimal to account for the noise produced by UAVs during actual flight operations. Wieland et al. [23] discuss in detail the context for the development of the method in Regulation 2019/945, and outline the main findings and discussions about this noise test code within the ASD-STAN/D5/WG8 working group on Unmanned Aircraft Systems. The noise produced by a UAV during hover has important differences with the noise produced by the same UAV during other manoeuvres like takeoff, landing or flyover, particularly in relation to directivity and prominence of the tonal components [16]. Therefore, the measurements carried out according to Regulation 2019/945 might not reflect the actual noise of the UAVs during other manoeuvres. Furthermore, the test code is based on the A-weighted sound power level, and this noise metric is unable to account for some of the main characteristics of UAV noise (e.g., tonal components, rapid fluctuations in the sound levels, high frequency noise, etc.). In the US, the American Standards Committee (ASC) S12 Working Group 58 (WG58) has agreed not to use the test code described in Regulation 2019/945, and is currently discussing the certification methods for small to medium UAVs [24]. As the test code in Regulation 2019/945, the WG58 is also considering noise testing of UAVs in anechoic chambers. However, this presents important issues: (1) the effects of flow recirculation on the acoustic measurements of UAVs in closed anechoic chambers [25]; and (2) the effect of weather conditions on the sound radiated by UAVs [19].
Depending on the specific certification procedure, a different metric is used. Aircraft noise metrics for certification include the broadband frequency-weighted noise levels, such as the maximum A-weighted sound level (LA,max) and the A-weighted Sound Exposure Level (LAE). The Sound Exposure Level is numerically equivalent to the total sound energy of an aircraft event. However, these two metrics do not account for certain features, such as the presence of tonal noise. The Effective Perceived Noise Level (EPNL) is the primary metric for the noise certification of fixed-wing and rotary-wing aircraft [26]. The EPNL accounts for the calculation of the Perceived Noise Level [27], which is an indicator of the overall perceived loudness, and is based on the Noy scale (i.e., a scale derived from a combination of amplitude and frequency). The EPNL also includes a correction to account for the duration of the exposure, and a tonal penalty based on the level of the strongest protruding tone [13]. The EPNL is calculated according to a procedure developed by the Federal Aviation Administration (FAA) [28].
These metrics have important limitations to appropriately assess the human response to UAV noise. To start with, these metrics assume a relatively constant noise source [20]. However, as discussed in Section 2, the effect of weather conditions and the control system to maintain vehicle stability are likely to cause rapid fluctuations of the sound levels over time. Therefore, the perception of these rapid sound fluctuations is unlikely to be captured by any of the current noise certification metrics. Moreover, UAV noise is likely to present multiple complex tones at harmonics for the BPFs of each of the multiple rotors operating. The EPNL is the only noise certification metric accounting for a tonal correction, but it seems to be unable to account for the perceptual effects of multiple tonal components distributed along the frequency spectra [13]. Another limitation of the EPNL is that its calculation only considers the one-third octave bands, with nominal centre frequencies between 50 Hz and 10 kHz. However, there is an important high frequency noise content (between 10 kHz to 20 kHz) in the UAV noise signatures [16].
Read and Roof [26] suggest that metrics optimised for UAV noise should include a finer resolution in both time and frequency and the ability to account for the presence of multiple complex tones. Sound quality metrics (e.g., loudness, sharpness, tonality, roughness, fluctuation strength and impulsiveness) are able to accurately assess how the human auditory system reacts to different acoustic features [29]. Loudness is a measure of the sensation of the sound intensity and sharpness measures the sensation of high frequency noise. Fluctuation strength and roughness describe the perception of slow and rapid temporal fluctuation of the sound, respectively. Impulsiveness accounts for the perception of sudden changes in the sound level. Tonality is a metric aimed at identifying and quantifying the perceptual effects of tonal components in a given sound. Sharpness, tonality and fluctuation strength have been found well correlated with rotorcraft noise annoyance [30][31]. In a study investigating the noise annoyance of hovering UAVs, Gwak et al. [14] found that the noise annoyance of UAVs (with MTOM ranging from 113.5 g to 11 kg) was highly related to loudness, sharpness and fluctuation strength. Torija and Li [18] investigated the preference of sounds generated by a single quadcopter (DJI Phantom 3) during level flyover operations at different distances and with different payloads (to vary the operating power of the vehicle). These authors implemented a series of multilevel linear models with the reported preference as the dependent variable. In these models, the intercept was fixed for all participants, and a series of sound quality metrics (and interactions between them—e.g., loudness–tonality interaction) were set to vary randomly across participants. These authors found that a multilevel linear model with a fixed intercept, a tonality metric, and the interaction between the loudness and sharpness metrics as random effects, estimated the reported preference for the quadcopter sounds to be R2 = 0.69.
In research on the effects of a hovering UAV on the perception of several urban soundscapes, Torija et al. [7] suggested that the annoyance reported for the soundscapes with the UAV hovering was highly influenced by the specific noise features of the UAV. They also discussed that the reported annoyance seemed to be also influenced by non-acoustic factors, such as the visual scene and expectation for the particular soundscape. Christian and Cabell [8] discussed that noise metrics aimed to provide an accurate assessment of the UAV noise might require the addition of corrections to account for the particular characteristics of their operations (e.g., a loitering penalty to account for the time of exposure). From the findings of Christian and Cabell [8], it might be concluded that the qualitative characteristics of UAV noise are important factors to understand the intrinsic annoyance of these vehicles, and therefore should be considered for the development of noise metrics and to identify acceptable noise levels.
With the deployment of UAVs at scale, their operation will lead to a series of bypassing events that are likely to be highly noticeable (due to their significant content in high frequency and close distance to communities). This intermittent noise, with sequences of noise events emerging above the existing background noise, are likely to cause higher attention to the noise source, and lead to an increase in annoyance [32]. This “eventfulness” may be described by noise metrics such as the Intermittency Ratio (IR). This metric, developed by Wunderli et al. [33], accounts for “the proportion of the acoustical energy contribution in the total energetic dose that is created by individual noise events above a certain threshold”. Emerging or salient noise events can divert attention from the task at hand to the noise source, and therefore reduce task performance [34]. Moreover, it is well accepted that noise events have to be noticed in order for them to contribute to an overall impression of annoyance [35][36]. Therefore, notice-event models (e.g., [36]) might aid in the assessment of soundscapes dominated by bypassing UAV noise events. Furthermore, metrics accounting for the LA,max and number of events (e.g., Noise and Number Index—NNI [37]) should also be considered for predicting the noise annoyance caused by UAV operations.
References
- Schäfer, A.W.; Barrett, S.R.H.; Doyme, K.; Dray, L.M.; Gnadt, A.R.; Self, R.; O’Sullivan, A.; Synodinos, A.P.; Torija, A.J. Technological, economic and environmental prospects of all-electric aircraft. Nat. Energy 2019, 4, 160–166.
- Mahony, R.; Kumar, V. Aerial Robotics and the Quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 19.
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97.
- Elsayed, M.; Mohamed, M. The impact of airspace regulations on unmanned aerial vehicles in last-mile operation. Transp. Res. Part D Transp. Environ. 2020, 87, 102480.
- Ackerman, E.; Strickland, E. Medical delivery drones take flight in east africa. IEEE Spectr. 2018, 55, 34–35.
- Booz Allen Hamilton. Urban Air Mobility (UAM) Market Study. Available online: https://ntrs.nasa.gov/api/citations/20190001472/downloads/20190001472.pdf (accessed on 13 January 2021).
- Torija, A.J.; Li, Z.; Self, R.H. Effects of a hovering unmanned aerial vehicle on urban soundscapes perception. Transp. Res. Part D Transp. Environ. 2020, 78, 102195.
- Christian, A.W.; Cabell, R. Initial Investigation into the Psychoacoustic Properties of Small Unmanned Aerial System Noise; AIAA Aviation Technology, Integration, and Operations Conference: Denver, CO, USA, 2017.
- Read, D.R.; Senzing, D.A.; Cutler, C.; Elmore, E.; He, H. Noise Measurement Report: Unconventional Aircraft—Choctaw Nation of Oklahoma: July 2019; DOT/FAA/AEE/2020-04; U.S. Department of Transportation, John A. Volpe National Transportation Systems Center: Cambridge, MA, 2020.
- EUROCONTROL. Aircraft Noise and Performance (ANP) Database. Available online: https://www.aircraftnoisemodel.org/ (accessed on 13 January 2021).
- Civil Aviation Authority. Departure Noise Mitigation: Main Report; Civil Aviation Authority: West Sussex, UK, CAP 1691; 2018.
- European Union Aviation Safety Agency (EASA). What Are the Requirements under the Subcategories of the ‘Open’ Category? Available online: https://www.easa.europa.eu/faq/116452 (accessed on 13 January 2021).
- Torija, A.J.; Roberts, S.; Woodward, R.; Flindell, I.H.; McKenzie, A.R.; Self, R.H. On the assessment of subjective response to tonal content of contemporary aircraft noise. Appl. Acoust. 2019, 146, 190–203.
- Gwak, D.Y.; Han, D.; Lee, S. Sound quality factors influencing annoyance from hovering UAV. J. Sound Vib. 2020, 489, 115651.
- Torija, A.J.S.; Rod, H.; Lawrence, J.L. Psychoacoustic Characterisation of a Small Fixed-Pitch Quadcopter. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise19, Madrid, Spain, 16–19 June 2019; Institute of Noise Control Engineering: Madrid, Spain, 2019; pp. 1884–1894.
- Alexander, W.N.; Whelchel, J. Flyover Noise of Multi-Rotor sUAS. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Madrid, Spain, 16–19 June 2019; Volume 259, pp. 2548–2558.
- Cabell, R.; McSwain, R.G.; Grosveld, F. Measured Noise from Small Unmanned Aerial Vehicles. In Proceedings of the NOISE-CON 2016, Providence, RI, USA, 13-15 June 2016; Document ID: 20160010139.
- Torija, A.J.; Li, Z. Metrics for Assessing the Perception of Drone Nois. In Proceedings of the e-Forum Acusticum 2020, Lyon, France, 7–11 December 2020; European Acoustics Association (EAA): Lyon, France, 2020.
- Alexander, W.N.; Whelchel, J.; Intaratep, N.; Trani, A. Predicting Community Noise of sUAS. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019.
- Senzig, D.; Marsan, M. UAS Noise Certification. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018; Volume 258, pp. 3718–3726.
- European Commission. Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft Systems; European Commission: Brussel, Belgium, 2019.
- ISO. ISO3744: 2010, Acoustics—Determination of Sound Power Levels and Sound Energy Levels of Noise Sources Using Sound Pressure—Engineering Methods for An Essentially Free Field over a Reflecting Plane; International Standards Organization: Geneva, Switzerland, 2010.
- Wieland, M.; Liebsch, R.; Vyshnevskyy, M. Noise Requirements of Unmanned Aircraft due to European Regulation 2019/945. In Proceedings of the QUIET DRONES, International e-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020; International Institute of Noise Control Engineering: Paris, France, 2020; pp. 484–491.
- Hellweg, R.D. ANSI/ASA Standards Activity on Measurement of UAS Noise. In Proceedings of the QUIET DRONES, International e-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020; International Institute of Noise Control Engineering: Paris, France, 2020; pp. 174–177.
- Weitsman, D.; Stephenson, J.H.; Zawodny, N.S. Effects of flow recirculation on acoustic and dynamic measurements of rotary-wing systems operating in closed anechoic chambers. J. Acoust. Soc. Am. 2020, 148, 1325–1336.
- Read, D.R.; Roof, C. Research to Support New Entrants to Public Airspace and Aircraft Noise Certification. In Proceedings of the QUIET DRONES, International e-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020; International Institute of Noise Control Engineering: Paris, France, 2020; pp. 401–417.
- Kryter, K.D. The Meaning and Measurement of Perceived Noise Level. Noise Control 1960, 6, 12–27.
- Federal Aviation Administration. Noise Standards: Aircraft Type and Airworthiness Certification, Calculation of Effective Perceived Noise Level from Measured Data; Federal Aviation Administration: Washington, DC, USA, 2002; Part 36, Appendix A2 to Part36 – Section A36.4.
- Fastl, H.; Zwicker, E. Psychoacoustics: Facts and Models; Springer: Berlin/Heidelberg, Germany, 2006.
- Krishnamurthy, S.; Christian, A.; Rizzi, S. Psychoacoustic Test to Determine Sound Quality Metric Indicators of Rotorcraft Noise Annoyance. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018; Volume 258, pp. 317–328.
- Boucher, M.; Krishnamurthy, S.; Christian, A.; Rizzi, S.A. Sound Quality Metric Indicators of Rotorcraft Noise Annoyance Using Multilevel Regression Analysis. Proc. Mtgs. Acoust. 2019, 36, 040004 doi: 10.1121/2.0001223
- Brink, M.; Schäffer, B.; Vienneau, D.; Foraster, M.; Pieren, R.; Eze, I.C.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Wunderli, J.-M. A survey on exposure-response relationships for road, rail, and aircraft noise annoyance: Differences between continuous and intermittent noise. Environ. Int. 2019, 125, 277–290.
- Wunderli, J.M.; Pieren, R.; Habermacher, M.; Vienneau, D.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Brink, M. Intermittency ratio: A metric reflecting short-term temporal variations of Transp. noise exposure. J. Expo. Sci. Environ. Epidemiol. 2016, 26, 575–585.
- Terroir, J.; De Coensel, B.; Botteldooren, D.; Lavandier, C. Activity Interference Caused by Traffic Noise: Experimental Determination and Modeling of the Number of Noticed Sound Events. Acta Acust. Acust. 2013, 99, 389–398.
- Sneddon, M.; Pearsons, K.; Fidell, S. Laboratory study of the noticeability and annoyance of low signal-to-noise ratio sounds. Noise Control Eng. J. 2003, 51, 300–305.
- De Coensel, B.; Botteldooren, D.; De Muer, T.; Berglund, B.; Nilsson, M.E.; Lercher, P. A model for the perception of environmental sound based on notice-events. J. Acoust. Soc. Am. 2009, 126, 656–665.
- Civil Aviation Authority. The Noise and Number Index; ERCD7907; Civil Aviation Authority: London, UK, 1981.


