+1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | tianran han | + 2575 word(s) | 2575 | 2020-12-03 07:21:26 | | | |
| 2 | Vivi Li | -27 word(s) | 2548 | 2020-12-09 03:23:27 | | |
Video Upload Options
Rapid exploitation of city underground space has led to the development of increasingly more underground slender-shape infrastructure like pedestrian tunnels, concourses, subway walkways, underground shopping streets, etc. Pedestrian evacuation in those public places in case of emergency can be disastrous if not properly guided. Therefore, it is important to understand how to enhance the evacuation efficiency through proper active guidance. In this study, we propose a digital twin based guiding system for pedestrian emergency evacuation inside a slender-shape infrastructure, aiming at enhancing the overall evacuation efficiency. Composition and calibration process of the guiding system are described, and a cellular automata based model is established to serve as the digital twin model. Two guidance strategies, namely traditional fixed guidance and smart guidance, are adopted by the digital twin to generate guidance instructions. A smart guidance strategy using a semi-empirical approach is proposed based on the understanding of the free movement and congested movement of pedestrian flow. Systems under different guiding strategies are compared and discussed over their effectiveness to promote excavation efficiency in different pedestrian population distribution settings. The simulation results show that a system under smart guidance tends to have shorter evacuation time (up to 23.8% time saving) and performs with more stability for pedestrian evacuations over the traditional fixed guided systems. The study provides insight for potential real applications of a similar kind.
1. Introduction
Rapid exploitation of city underground space has led to the development of increasingly more underground infrastructure characterized by their slender shape, like pedestrian tunnels, concourses, subway walkways, underground shopping streets, underpasses, subway station platforms, etc. Those public spaces can become crowded during special events or severe emergency situations like in fire accidents. Crowd congestion can be disastrous if not handled properly [1][2][3]. For these slender structures, people can easily get disoriented and confused during emergencies, which may lead to chaos and life threating scenarios. Effective guidance systems could greatly enhance the effectiveness of evacuations [4], especially for infrastructure with multiple exits where non-guided behavior of pedestrians can be chaotic. Therefore, it is crucial to understand the movement of pedestrians and the role that guidance plays for these pedestrian emergency evacuations.
One way to learn more about the pedestrian dynamics during an evacuation is by conducting realistic numerical simulations. Many types of models can be used for describing pedestrian flows, such as macroscopic fluid-dynamic and gas-kinetic models [5][6][7][8][9], microscopic noninteger off-lattice models and microscopic cellular automata (CA) [10][11][12].
CA models share the characteristic of simplicity and amenability in the numerical simulations in comparison with the off-lattice models. Therefore, they have been applied as an effective tool for realistically modeled particle-like objects in complex nonlinear systems, such as vehicular traffic flow [13][14][15]. By introducing proper empirical rules, a CA model can also be used for the simulation of pedestrian dynamics and is well-suited for modelling pedestrian behavior in emergency evacuations. Fukui and Ishibashi (FI) proposed a CA model for bi-directional pedestrian flow simulation in passageway [16][17]. A floor field model was proposed to capture the interactions between pedestrians by introducing ideas from chemotaxis [18][19]. More realistic simulations were achieved by variations and combination of the FI model and the field floor model to arrive at more realistic fundamental diagrams [20][21][22][23]. To take into consideration the stochastic nature of the pedestrian flow, a pre-fixed probability model and a list-based kinetic Monte Carlo method were applied to the CA modelling process [24][25][26][27]. Bi-direction pedestrian flows with different walk speeds were also examined using a CA model based on kinetic Monte Carlo method [25].
Out of the consideration for pedestrian flow characteristics, previous studies also considered effects of various influencing factors in evacuations. For example, the influence of obstacles and geometrical parameters such as gate location and width were studied [10][28]. The probabilistic simulation of fire spreading effect and its impact on pedestrian behaviors were included in the modelling process [29]. The effect of fire location on routing determination and moving velocity of pedestrians were examined [30]. However, the objective of these delicate simulations were normally aimed at improving the internal space design for pedestrian facilities, and thus they shared passive nature in general, meaning that these studies tended to focus on understanding spontaneous reactions of pedestrians rather than to improve the evacuation efficiency by imposing active strategic guidance. In fact, to the best knowledge of the authors, very few studies have yet incorporated such active guidance and their impacts in pedestrian evacuation simulations using CA simulations.
With the rapid growth of information technologies and operation technologies, significant efforts have been made in the manufacturing sector to achieve smarter and more proactive management systems [31]. Industry 4.0 [32], a concept from Germany, specializes mainly in the manufacturing industry, highlights the importance of establishing a cyber-physical system (CPS) where the physical space and cyber space share deep coupling with each other. The CPSs are capable of synchronizing the real processes with its digital copy in cyber space in real time through data communication. In the cyber space, smart algorithms and artificial intelligence process the incoming data and feed the results back to the physical space in various ways. In essence, Industry 4.0 is the trend towards automation and data exchange in manufacturing technologies and processes characterized by CPSs, supported by technologies such as the internet of things (IoT), cloud computing, cognitive computing, artificial intelligence, and so on [33][34][35]. The establishment of CPS can greatly improve the way that complex systems can be interpreted to support their maintenance, enabling a new simulation approach, which benefit from the ubiquitous connectivity in manufacturing systems to offer a real-time synchronization between the physical asset and its digital representation. This simulation approach is generally referred to as the elaboration of Digital Twins (DT) [36].
A Digital Twin is a high-fidelity representation of the operational dynamics of its physical counterpart, enabled by near real-time synchronization between the cyberspace and physical space [37]. The convergence of the digital world and physical world enables smart decisions to be made at every single point of manufacturing operations, thus nurturing a data-driven smart manufacturing environment. Therefore, DT provide a means of simulating, predicting, and optimizing physical manufacturing systems and processes. Using DT, together with intelligent algorithms, organizations can achieve data-driven operation monitoring and optimization, develop innovative products and services, and diversify value creation and business models [38][39]. So far, many applications of DT have been focusing on systems and processes in manufacturing sectors [39][40][41][42], although some illustrations have been attempted in the field of architecture [43], railway turnout systems [44], and bridges [45], with the aim of enabling design improvement, operational instructions, as well as failure and fatigue prediction. While digital twin concept has grown in popularity in various research studies, as well as applications in the manufacturing sectors, their applications in the area of public safety and infrastructure maintenance are still quite limited.
2. Smart Guidance through Digital Twin Simulations
For people in an emergency evacuation situation, making informed decisions to evacuate for safety can be difficult, due to various factors such as misinformation, panic disorders, or blocked view. Their chances of survival would be significantly enhanced if an effective guidance system were presented. However, the current guidance systems for emergency evacuations are normally designed according to the geometry of the internal space of the infrastructure alone which typically set in guiding directions. Naturally, the fixed guidance system could only be expected to work properly under certain conditions, and can fail to effectively accommodate for other cases. Therefore, it is meaningful to introduce a guidance system that would adaptively alter in guidance direction according to the current pedestrian population distribution and geometry of the infrastructure internal space.
In this study, we bring in the concept of digital twin to represent the condition of the pedestrian distribution inside a slender shape infrastructure. Figure 1 demonstrates a schematic diagram of a DT concept for an underground pedestrian tunnel. Because the distribution of pedestrians in the infrastructure in every given time is different, the evacuation efficiency will subsequently be affected if an emergency should occur. The infrastructure can be monitored by various sensors, which may potentially include computer vision based sensors, temperature sensors, and smog sensors, which can provide sufficient accuracy information regarding the distribution of people inside the infrastructure as well as its current service state. The functionality of the sensing system should be robust enough to cope with difficult situations such as fire or smoke, depending on specific application of the infrastructure. All these sensors are then connected with the Internet of Things (IoT) to share information, which are then integrated through a data acquisition system and sent to the digital twin. IoT refers to connections between a network of physical assets through which data can flow between themselves. The connections are made possible by the secure implementation of computer networks, the Internet, and communication protocols. The IoT is the infrastructure in the physical space for connecting physical assets [46].
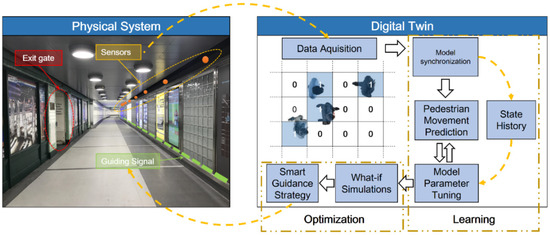
Figure 1. Digital Twin Concept for a Pedestrian Tunnel.
Pedestrian behavioral dynamics in emergency evacuations are sophisticated on both the individual and system level. In this study, movement dynamics of pedestrians during evacuation are of our main concern. Therefore, a CA based model seems to be an ideal candidate to form the digital twin which offers high versatility and calculation efficiency. Details of the model will be introduced in the next section. Due to the fact that a CA model naturally divides the infrastructure internal space into discrete cells, it is very easy to synchronize the digital twin with pedestrians’ location obtained by a monitoring system registering into corresponding cells, as shown schematically in Figure 1. Based on the synchronized state, this evacuation model can then make prediction of pedestrian movement and constantly compare the predicted results with the monitored states, based on which it can get its parameters estimated and tuned to keep the model up to date. Parameter tuning can be achieved based on data driven approaches through machine learning by minimizing the difference of the predicted state and the monitored states. After these, we create a digital duplicate of the current state for the evacuation process, which gives us the opportunity to orchestrate the evacuations within the virtual environment by running what-if simulations, testing for best evacuation guidance strategy, and then apply it back to the physical world to improve the efficiency of the pedestrian evacuations. The instructions in the physical world can be conducted by different approaches inside the infrastructure—for example, a visual based guidance system like alterable distributed guiding signal (Figure 1), an audio based system like vocal signals, automatic physical barriers, or enforced by personals in duty, depending on specific application scenarios.
In the long term, the proposed digital twin can be used to capture the operational history of the particular infrastructure, formed by the large volume of its operational states. Over time, these states become the operational history of the infrastructure, which characterize the particular operational state evolution of the infrastructure in terms of pedestrian behavior. As the volume of data is constantly accumulating and being processed, the performance of the digital twin will be increasingly enhanced, resulting in a more accurate understanding of the pedestrian behavioral dynamics. This information could lead to the establishment of predictive warnings system for certain dangers, such as overcrowding or other related potential hazards.
3. Summary and Conclusions
Due to the rapid exploitation of the underground space, pedestrian emergency evacuation inside slender-shaped infrastructure is becoming increasingly important, and those evacuations can be disastrous if not properly guided. Aiming at improving the overall evacuation efficiency, a digital twin based framework to cope with emergency evacuation inside slender-shape infrastructure is proposed. The system composition and calibration of the digital twin are described, leveraging the benefits of recent development in technologies such as various sensors, IoT, data driven models, and machine learning, which are becoming increasingly low in cost and popular in application in the engineering practice. A CA based model is served as the digital twin to tackle the multi-exits evacuation problem. CA movement rules are established according to relative position of the pedestrians to the exit gates. This paper introduces two types of guidance strategies to guide pedestrians to the exit gates, namely a fixed guiding strategy and smart guiding strategy. The former only determines the guiding direction by considering the geometry of the infrastructure internal space, while the latter also takes into consideration the actual population distribution obtained by the monitoring system. For the smart guidance strategy, a semi-empirical approach is proposed based on the understanding of the free movement state and congested movement state of the pedestrian flow. The two strategies are compared and discussed by running 100 simulations in different pedestrian distribution settings where the overall population density and the location of crowd are treated as the main variables. In the physical world, the instructions derived in the DT can be conducted by different approaches inside the infrastructure, like visual/audio based guiding systems, automatic physical barriers, or enforced by personals in duty. Some of the main findings based on the simulation results can be summarized below.
(a) In general, evacuation time increases with higher overall density for both guiding strategies. However, the smart-guided simulations tends to experience slower growth in evacuation time than that of the fixed guided ones for increased density settings, and thus more resilient to pedestrian population density change.
(b) Different pedestrian crowd location also influences the total evacuation time, and the performance of the smart guided system is overall more immune to the influence of the position change of these regions in comparison with the fixed guided cases.
(c) The smart-guided system is found to most obviously outperform the fixed-guided system in mid to high population densities (density around 0.3 to 0.5), which results in time saving ranging from 8.7% to 23.8%. In relative lower density settings, improvements of the smart guided system over fixed guided ones are not obvious.
(d) Simulation results indicate that the smart guided system demonstrates smaller discrepancy over different simulation realizations, demonstrating more consistent results, and therefore a more robust guiding system.
(e) A closer examination of the pedestrian evacuation behavior shows that the introduction of the smart guidance helps to more scientifically divide people to evacuate through respective exit gates so that crowds tend to dissipate simultaneously, and therefore, more evacuation capacity of the exit gates can be mobilized, resulting in shorter total evacuation time and improved safety for pedestrians collectively.
In summary, a system under smart guidance tends to have a shorter evacuation time and performs more stable for pedestrian evacuations over the traditional fixed guided systems, which provides insight for potential real applications of a similar kind. Comparing to the previous works in the literature that only concerned pedestrian flow characteristics or passive interactions between pedestrians and the geometry of the infrastructure internal space, this work showcased for the first time the potential benefits from an active smart-guidance system in the context of pedestrian emergency evacuations. The system based on the application of digital twin concept, created a risk mitigation mechanism dynamically adaptable for various scenarios, and therefore enhanced substantially the efficiency and robustness of the system response for emergency evacuations. Expanded applications could be easily devised based on similar ideas to benefit various interactive environments in the fast-evolving smart city context. In the current research, a relatively simplified guidance algorithm was adopted with limited evacuation efficiency improvement. Our next step is to develop a guidance algorithm with self-evolving capability for complex and more realistic infrastructure geometry settings.
References
- Fahy, R.F.; Proulx, G.; Aiman, L. Panic or not in fire: Clarifying the misconception. Fire Mater. 2012, 36, 328–338.
- Helbing, D.; Johansson, A.; Al-Abideen, H.Z. Dynamics of crowd disasters: An empirical study. Phys. Rev. E 2007, 75, 046109.
- Lin, P.; Ma, J.; Liu, T.; Ran, T.; Si, Y.; Li, T. An experimental study of the “faster-is-slower” effect using mice under panic. Phys. A Stat. Mech. Appl. 2016, 452, 157–166.
- Haghani, M.; Sarvi, M. Human exit choice in crowded built environments: Investigating underlying behavioural differences between normal egress and emergency evacuations. Fire Saf. J. 2016, 85, 1–9.
- Henderson, L.F. On the fluid mechanics of human crowd motion. Transp. Res. 1974, 8, 509–515.
- Huang, L.; Wong, S.C.; Zhang, M.; Shu, C.W.; Lam, W.H. Revisiting Hughes’ dynamic continuum model for pedestrian flow and the development of an efficient solution algorithm. Transp. Res. Part B Methodol. 2009, 43, 127–141.
- Hughes, R.L. A continuum theory for the flow of pedestrians. Transp. Res. Part B Methodol. 2002, 36, 507–535.
- Hughes, R.L. The flow of human crowds. Annu. Rev. Fluid Mech. 2003, 35, 169–182.
- Helbing, D.; Farkas, I.J.; Vicsek, T. Freezing by heating in a driven mesoscopic system. Phys. Rev. Lett. 2000, 84, 1240.
- Varas, A.; Cornejo, M.D.; Mainemer, D.; Toledo, B.; Rogan, J.; Munoz, V.; Valdivia, J.A. Cellular automaton model for evacuation process with obstacles. Phys. A Stat. Mech. Appl. 2007, 382, 631–642.
- Wolfram, S. Theory and Applications of Cellular Automata; World Scientific: Singapore, 1986.
- Wolfram, S. Cellular Automata and Complexity; Addison-Wesley: Boston, MA, USA, 1994.
- Knospe, W.; Santen, L.; Schadschneider, A.; Schreckenberg, M. Towards a realistic microscopic description of highway traffic. J. Phys. A Math. Gen. 2000, 33, L477.
- Knospe, W.; Santen, L.; Schadschneider, A.; Schreckenberg, M. Single-vehicle data of highway traffic: Microscopic description of traffic phases. Phys. Rev. E 2002, 65, 056133.
- Nagel, K.; Schreckenberg, M. A cellular automaton model for freeway traffic. J. Phys. I 1992, 2, 2221–2229.
- Fukui, M.; Ishibashi, Y. Self-organized phase transitions in cellular automaton models for pedestrians. J. Phys. Soc. Jpn. 1999, 68, 2861–2863.
- Fukui, M.; Ishibashi, Y. Jamming transition in cellular automaton models for pedestrians on passageway. Phys. Soc. Jpn 1999, 68, 3738–3739.
- Burstedde, C.; Klauck, K.; Schadschneider, A.; Zittartz, J. Simulation of pedestrian dynamics using a two-dimensional cellular automaton. Phys. A Stat. Mech. Appl. 2001, 295, 507–525.
- Kirchner, A.; Schadschneider, A. Simulation of evacuation processes using a bionics-inspired cellular automaton model for pedestrian dynamics. Phys. A Stat. Mech. Appl 2002, 312, 260–276.
- Muramatsu, M.; Nagatani, T. Jamming transition in two-dimensional pedestrian traffic. Phys. A Stat. Mech. Appl. 2000, 275, 281–291.
- Takimoto, K.; Nagatani, T. Spatio-temporal distribution of escape time in evacuation process. Phys. A Stat. Mech. Appl. 2003, 320, 611–621.
- Yue, H.; Guan, H.; Zhang, J.; Shao, C. Study on bi-direction pedestrian flow using cellular automata simulation. Physica Phys. A Stat. Mech. Appl. 2010, 389, 527–539.
- Yue, H.; Hao, H.; Chen, X.; Shao, C. Simulation of pedestrian flow on square lattice based on cellular automata model. Phys. A Stat. Mech. Appl. 2007, 384, 567–588.
- Sun, Y. Simulations of bi-direction pedestrian flow using kinetic Monte Carlo methods. Phys. A Stat. Mech. Appl. 2019, 524, 519–531.
- Sun, Y. Kinetic Monte Carlo simulations of bi-direction pedestrian flow with different walk speeds. Phys. A Stat. Mech. Appl. 2020, 124295.
- Weng, W.; Chen, T.; Yuan, H.Y.; Fan, W.C. Cellular automaton simulation of pedestrian counter flow with different walk velocities. Phys. Rev. E 2006, 74, 036102.
- Yang, L.; Li, J.; Liu, S. Simulation of pedestrian counter-flow with right-moving preference. Phys. A Stat. Mech Appl. 2008, 387, 3281–3289.
- Alizadeh, R. A dynamic cellular automaton model for evacuation process with obstacles. Saf. Sci. 2011, 49, 315–323.
- Zheng, Y.; Jia, B.; Li, X.G.; Zhu, N. Evacuation dynamics with fire spreading based on cellular automaton. Phys. A Stat. Mech. Appl. 2011, 390, 3147–3156.
- Yang, L.; Fang, W.; Huang, R.; Deng, Z. Occupant evacuation model based on cellular automata in fire. Chin. Sci. Bull. 2002, 47, 1484.
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334.
- Moeuf, A.; Pellerin, R.; Lamouri, S.; Tamayo-Giraldo, S.; Barbaray, R. The industrial management of SMEs in the era of Industry 4.0. Int. J. Prod. Res. 2018, 56, 1118–1136.
- Hermann, M.; Pentek, T.; Otto, B. Design principles for industrie 4.0 scenarios. In Proceedings of the 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016.
- Kagermann, H.; Wahlster, W.; Helbig, J. Recommendations for Implementing the Strategic Initiative Industrie 4.0: Final Report of the Industrie 4.0 Working Group; Acatech: München, Germany, 2013; pp. 19–26.
- Lasi, H.; Hussain, H.I.; Ślusarczyk, B.; Jermsittiparsert, K. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242.
- Negri, E.; Fumagalli, L.; Macchi, M. A review of the roles of digital twin in cps-based production systems. Procedia Manuf. 2017, 11, 939–948.
- Schleich, B.; Anwer, N.; Mathieu, L.; Wartzack, S. Shaping the digital twin for design and production engineering. CIRP Ann. 2017, 66, 141–144.
- Lu, Y.; Xu, X. Cloud-based manufacturing equipment and big data analytics to enable on-demand manufacturing services. Robot. Comput.-Integr. Manuf. 2019, 57, 92–102.
- Tao, F.; Sui, F.; Liu, A.; Qi, Q.; Zhang, M.; Song, B.; Guo, Z.; Lu, S.C.Y.; Nee, A.Y.C. Digital twin-driven product design framework. Int. J. Prod. Res. 2019, 57, 3935–3953.
- Cheng, J.; Zhang, H.; Tao, F.; Juang, C.F. DT-II: Digital twin enhanced Industrial Internet reference framework towards smart manufacturing. Robot. Comput.-Integr. Manuf. 2020, 62, 101881.
- Cimino, C.; Negri, E.; Fumagalli, L. Review of digital twin applications in manufacturing. Comput. Ind. 2019, 113, 103130.
- Lu, Y.; Liu, C.; Kevin, I.; Wang, K.; Huang, H.; Xu, X. Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues. Robot. Comput.-Integr. Manuf. 2020, 61, 101837.
- Ito, K. Change beyond building information modeling to a “Digital Twin” in architecture. Jpn. Archit. Rev. 2019, 2, 391.
- Kaewunruen, S.; Lian, Q. Digital twin aided sustainability-based lifecycle management for railway turnout systems. J. Clean. Prod. 2019, 228, 1537–1551.
- Lu, R.; Brilakis, I. Digital twinning of existing reinforced concrete bridges from labelled point clusters. Autom. Construct. 2019, 105, 102837.
- Bagheri, B.; Lee, J. Big Future for Cyber-Physical Manufacturing Systems. Des. World 2015. Available online: https://www.researchgate.net/publication/282355928_Big_future_for_cyberphysical_manufacturing_systems (accessed on 2 November 2020).