 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Hafeez Rehman | + 3839 word(s) | 3839 | 2020-09-21 10:08:08 | | | |
| 2 | Vivi Li | -443 word(s) | 3396 | 2020-10-21 08:35:32 | | | | |
| 3 | Vivi Li | Meta information modification | 3396 | 2020-10-26 10:05:07 | | |
Video Upload Options
Shape-memory polymers (SMPs) are intelligent materials capable of sensing an external stimulus and entering a transient state according to a stimulus-response, and finally recovering to the initial state through a recovery process, known as the shape memory effect.
1. Introduction
Natural muscles generate enough mechanical energy through enormous driving strain and rapid response to achieve complex movements such as running, swimming, climbing, and flying. Artificial muscles can match specific temporal, spatial, or force regimes typical of biological nature, but so far they cannot fully replicate all of these capabilities [1][2]. Thus, imitating natural muscles has been an essential challenge and opportunity for scientists. However, studies show that the performance of some artificial muscle materials exceeds that of natural muscle in some aspects. They are therefore particularly attractive for many applications where a muscle-like response is desirable, for-example in medical devices, prostheses, robotics, toys, biomimetic devices, and micro/nanoelectromechanical systems [3], in which, the high-loading actuators use electro- and thermo-activated artificial muscles [4][5]. Soft robots can also be used in an extreme biological environment with photo-activated motors [6][7]. Therefore, the field of artificial muscle is highly interdisciplinary and overlaps with various areas such as material science, chemical engineering, mechanical engineering, electrical engineering, and chemistry [3]. Compared to other materials, polymer materials have the advantages of easy preparation, low price, high elasticity, superiorities at large deformation and self-healing. Further, polymeric artificial muscle exhibits excellent multiple stimuli-responses [8][9][10][11]. Therefore, Mirvakili and co-workers [12] demonstrated a multidirectional artificial muscle from a highly oriented nylon filament that could bend and thus eliminate the need for a mechanical transmission mechanism and space for storing long linear actuators. The oriented nylon fiber with a thermal conductivity of 0.1 W·m−1·K−1 showed a 5% deformation with a temperature change from 25 to 140 °C. By cycling the input power, they observed that these nylon fiber actuators had a fully reversible amplitude response over 100,000 cycles.
Although polymeric artificial muscles resemble to a large extent natural muscles, challenges remain within many of the technical applications. Dielectric elastomer actuators (DEAs) are capable of achieving periodic locomotion at high frequencies and generating high power densities; nevertheless, the weight of kilovolt supplies has limited the performance of DEAs [13]. The voltages employed in ionic artificial muscles are low, but they still suffer from high energies because of the close spacing between ions and electronic charges and the transfer of charges [3][14][15][16]. However, SMPs have clear beneficial properties, including their simple, fast response, high extensibility, and high power density with low voltage requirements. They are suitable as easily controllable actuators or heat-activated artificial muscles. Therefore, SMP-based soft actuators have been applied in many robot designs, such as soft swimming robots [17], sequential self-folding or interlocking components [18], hinges for the deployment of a solar array prototype in the aerospace industry [19], and rigid cable inflatable (RI) structures for large space systems [20][21]. Here, we focus primarily on the scientific aspects of shape-memory polymer artificial muscles, including their mechanisms, applications and challenges.
2. Applications of Shape-Memory Polymeric Artificial Muscles
2.1. Thermo-Induced Shape-Memory Polymeric Artificial Muscles
The development of thermally actuated SMPs has focused primarily on relatively low temperatures (Tc < 100 °C) and using elastomeric polymers such as thermoplastic polyurethane (TPU), cross-linked polyethylene, polycaprolactone (PCL) and polynorbornene. These materials were considered appropriate for biomedical applications, such as smart fibers, shrinkable tubes, and aerospace applications using changes in modulus and switching temperature for shape change as well as actuation. These materials consist of network points and molecular switches that are constructed either by physical cross-links of intermolecular interactions or chemical cross-links through covalent bonds. This cross-linking structure leads to phase separation and produces hard segments, soft segments, and domain formation in the polymeric network. Inside this system, the hard segment serves as a pivoting point for shape recovery movement, while the soft segment mainly serves to absorb the external stress that is applied to the polymer [8][22]. Based on intermolecular interactions, these polymers can be further sub-divided into linear and branched polymers. For linear polymers, the shape-memory effect is due to their phase separation and domain orientation in the block copolymers such as PUs and PMMA-g-PEG copolymers. In polyester–urethanes, the oligomer segments serve as hard-segments, while the polyester serves as a switching segment (Figure 1). However, as for PMMA-graft-PEG copolymers, the PMMA is not covalently cross-linked with PEG, but rather the junction point of the backbone and side chains behave as a physical cross-linking point. On other hand, entangled branched copolymers usually take much longer to disappear by the repetitive motion of polymers [20][23]. Further, these materials have the ability of rapid shape recovery and demonstrate a durable elastic nature with bio-compatibility, which is used in biomaterials and shape-memory polymer textiles.
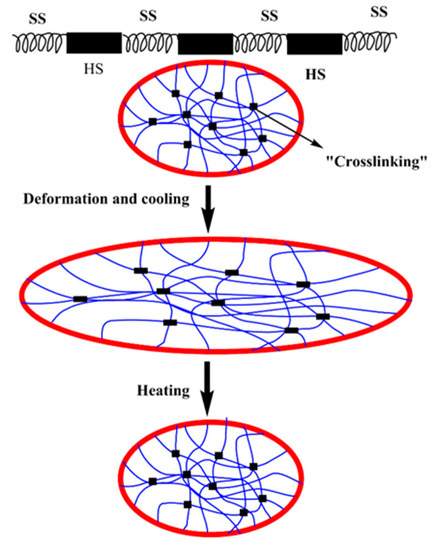
Figure 1. The micro-mechanism of the shape-memory effect of polymers, where HS refers to the hard segment, while SS refers to soft segments.
Similarly, we prepared shape-memory PUPCL copolymer materials [4] with self-healing abilities, which showed a high cycle life. From load lifting experiments, it was observed that these materials were able to lift a load of more than 20 times the mass of the actuator material (Figure 2a). More recently, another type of shape-memory polymer was prepared [24], which was synthesized from PCL, PDMS, and PUs. Along with the high cycle life (based on self-healing behavior), it could also lift a mass 500 times its weight within 5 s and the maximum power density registered was half of the mammalian skeletal muscles (Figure 2b). Moreover, Xie et al. [25] introduced poly (ethylene-co-vinyl acetate)/graphene (cEVA/G) shape-memory actuators. They developed a series of EVA-carbon fiber based composites (EVA/CF) with a remarkably enhanced recovery stress both in a free state and under compressive stress. The addition of CF into EVA increased the modulus and the recovery stresses. Consequently, cEVA/CF composites exhibited a robust shape recovery performance under a counteracting load. This behavior of the composite was well modelled in a deployable device, as shown in Figure 2c. Recently they observed that these materials had a cyclic and dual sensitive (light/thermal) capacity [26]. The cyclic actuation was enabled by crystallization-induced elongation and melting-induced contraction, which was induced by the EVA part of the composites. When using NIR (near infra-red) irradiation and direct heating, an indicating circuit, which used a lamp as an alarm, was enabled to form a conceptual actuator for sensing applications. This actuator could effectively raise a signal (i.e., the lamp is turned on) when responding to a direct heating source, and after removing direct heating, the alarm was disengaged, i.e., light is turned off, and elongation/shape fixation occurred at room temperature. The process repeated itself during shape recovery when the system was heated for recovery to complete the process.
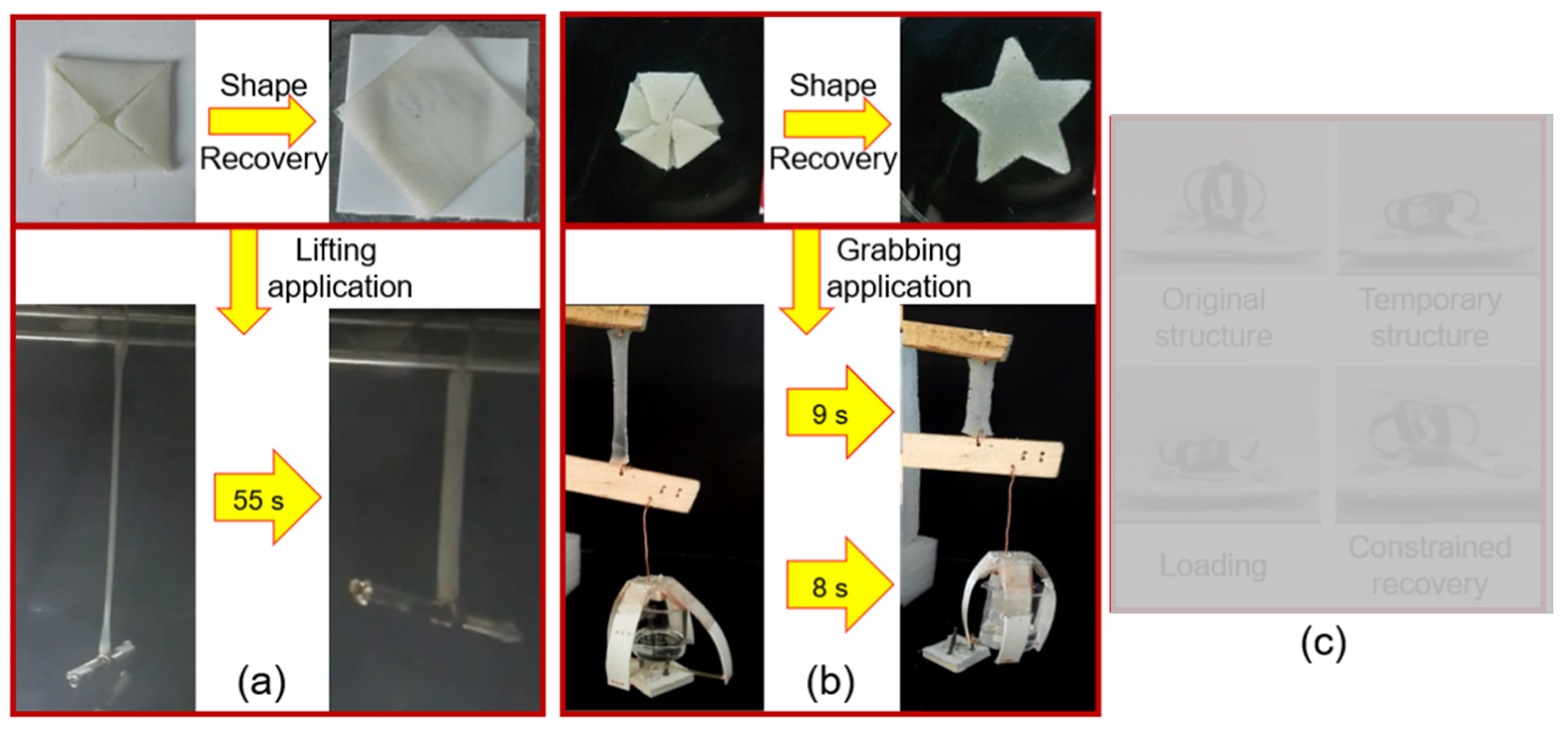
Figure 2. (a) Thermally actuated shape-memory behavior and applications of the PUPCL copolymer (Reprinted (adapted) with permission [4]. Copyright (2018) John Wiley and Sons); (b) the actuation and grasping behavior of the PUPCL-DS copolymer (Reprinted from Materials and Design [24]. Copyright (2019) Elsevier); (c) the deployable device structure made up of cEVA/CF composites shape recovery behavior (Reprinted (adapted) with permission [25]. Copyright (2018) Elsevier).
2.2. Photo-Induced Shape-Memory Polymeric Artificial Muscles
Light-responsive molecules can undergo isomerization in the presence of a particular light stimulus that reversibly changes their structures between two or more chemical aggregates. To be more specific, this kind of isomerization affects the orientation and arrangement within the molecular chains. These changes express themselves in terms of color change or visible deformation on the macro-scale. In recent years, many scientists have prepared a large number of artificial muscles with a specific mechanical strength and light-driven ability by adding organic phases to the polymeric systems, e.g., azobenzene [27] or spiropyran [28], or inorganic phases, e.g., graphene [29], or metal nanoparticles [30][31]. In comparison to thermal-responsive polymers, light-induced polymers have the unique advantages of instantaneous control, environmental friendliness, non-contact initiation, etc., which is of importance in the aerospace, biomedical, and other fields.
The reversible phase transition uses the trans–cis photo-isomerization of azobenzene groups (Figure 3a). The rod-like trans-structure of the liquid crystal phase is stable at room temperature, and the curved cis-structure is easily obtained under external stimuli. Typically, UV irradiation is used to trigger the isomerization phenomenon. For example, the isomerization of a single molecule with shrinkage in its length of 3.5 Å usually starts with ultraviolet irradiation. This isomerization is reversibly restored with visible light radiation as well as heating. Therefore, to obtain a unique controllable deformation, an azobenzene group was added to the polymer network [32]. The continuous accumulation of this isomerism and exposure to ultraviolet irradiation leads to a polymer phase transition. Thus, the final product changes from the anisotropic state to the isotropic state, while causing macro-scale deformation (Figure 3b). On the other hand, the photo-thermal effect can also induce isomerization in the system. This can be achieved by adding appropriate photo-thermal conversion particles, such as carbon materials [33], metal nanoparticles [34], and organic dyes [35]. Therefore, on the exposure of the compound to visible or NIR irradiation, the doped particles serve as a heat source to raise the temperature of the system above the liquid crystal transition point, resulting in the transformation to the isotropic state (Figure 3c). Furthermore, because of the Weigert effect, when the transition distance (long axis) of the trans azobenzene molecule is parallel to the polarization direction of the linearly polarized light, the azobenzene unit will absorb energy to reach the excited state and undergo trans–cis isomerization (Figure 3d). In contrast, the molecules that are perpendicular to the polarization direction do not undergo this process and maintain their initial state. After repeating multiple cycles of trans–cis–trans isomerization, the transition distance of all trans-azobenzenes will be perpendicular to the direction of polarized light. Subsequently, it will become stable and the photo-reorientation of azobenzene will be complete (Figure 3d) [34].
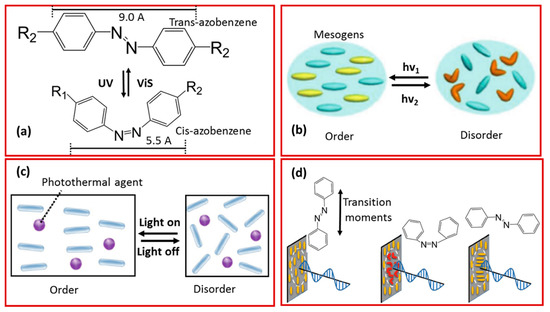
Figure 3. (a) Reversible trans–cis photo-isomerization of azobenzene and schematic illustration of (b) photo-induced and (c) photothermal-induced order–disorder phase transition in LCPs (Reprinted (adapted) with permission [36]. Copyright (2019) John Wiley and Sons). (d) Photo-reorientation of azobenzene containing LCPs with linearly unpolarised light (Reprinted (adapted) with permission [37]. Copyright (2019) John Wiley and Sons).
2.3. Electro-Induced Shape-Memory Polymeric Artificial Muscles
Heating above transition temperatures, such as Tg or Tm, is usually used in shape-memory materials. Therefore, to obtain uniform heating, electrically conducting composites were synthesized by using CNTs, graphene oxide, a CNT membrane, and carbon black as fillers in which the applied voltage yields an electrical pulse and initiates actuation and deformation of the material via Joule heating [38][39][40][41][42]. Thus, the primary source of mediation is the applied field, which provides potential and brings changes in the soft segment of the polymer to restore its original state. This means that the underlying concept required for the shape-memory phenomenon is the same in electro-active (electrically actuated) shape-memory polymers as in thermo-active shape-memory polymers [43][44]. Consequently, these materials have received great interest because of their successful applications in electro-active activators, such as in smart actuators and micro aerial vehicles [45]. The mechanical reinforcement and functionalization of these filler-based SMPs are achieved mainly through the hybridization process. Generally, chemical hybridization is considered superior to physical blending because it can improve interfaces between the polymer and fillers via a fine dispersion process. Furthermore, chemically incorporated fillers provide multifunctional cross-links, which not only augment rubber elasticity but also enhance conventional strength and strain recovery [42][46]. The reason for this is that the CNTs have unique structural arrangements of atoms, a high aspect ratio, and excellent mechanical, thermal, and electronic properties. Additionally, CNTs are highly flexible, which gives them remarkable advantages, making them the best reinforcement component in host polymer matrices [42][47].
Similarly, graphene, which is essentially a CNT cut along its axis so that it unrolls and lays flat, has 2D sp2 hybridization carbons and exhibits excellent electrical conductivity. Further, the 3D interconnection of graphene can be obtained by freeze casting, self-gelation, and chemical vapor deposition. In polymer foams, the graphene not only increases conductivity but also contributes to the improved mechanical properties [46][48][49][50]. Furthermore, carbon fiber and oxidized graphite also show high electrical conductivity because of their high surface area and surface polarity. Using this electrically induced actuation mechanism, Liu et al. [51] studied an electro-active shape-memory composite of a CNT/graphene aerogel (Figure 4a). When CNT and graphene, in a weight ratio of 3:5, were added to an epoxy resin, the electrical conductivity was nearly 16.3 S/m and the composites showed shape recovery after 120 s at a potential difference of 60 V. Mohan and co-workers [52] combined poly (lactic acid) with CNT and obtained a nanocomposite by a normal chemical process as shown in Figure 4d. The nanocomposite had a conductivity of 10−6 S/m with shape recovery behavior within 11 s at a constant voltage of 60 V. The same phenomenon was observed for a composite of Cu-decorated CNTs dispersed in PLA/ESO (epoxydized soybean oil). The nanocomposite recovered to its original shape within 35 s with a voltage of 40 V (Figure 4b) [53].
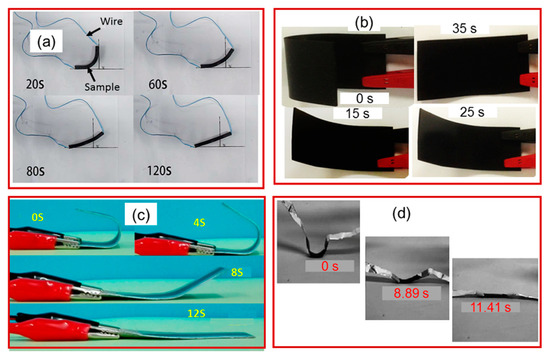
Figure 10. (a) The shape-recovery process of the compound aerogel (with a carbon nanotube:graphene weight ratio of 3:5)/epoxy resin composite under a voltage of 60 V (Reprinted from Journal of Materials Chemistry A [51]. Copyright (2015) Royal Society of Chemistry); (b) photographs showing the shape recovery process of the representative E-CNT sample obtained at a triggering voltage of 30 V (Reprinted from Materials [53]. Copyright (2015) MDPI); (c) demonstration of electro-active shape-memory behavior of PPLACNT-S (Reprinted (adapted) with permission [54]. Copyright (2016) American Chemical Society); (d) electroactive shape recovery behavior of the Cu-CNT dispersed PLA/ESO nanocomposite (Cu-CNTs content of 2 wt% at a DC voltage of 40 V) (Reprinted (adapted) with permission [52]. Copyright (2016) John Wiley and Sons.
A remarkable shape recovery behavior (within 12 s) was observed for a poly (ethylene-co-vinyl acetate) /Poly(ε-caprolactone) /CNT (EVA/PCL/CNT) blend (Figure 4c). Recently, various synthesis methods were studied for the preparation of electro-active shape-memory polymers, based on the following fillers: graphene oxide [55], carbon black [56], CNT layers [57], TiO2 [58], carbon fibers [59], and single-walled CNTs [60]. Most of these fillers not only made the polymer material conductive but also improved the mechanical properties. Most of the materials showed a shape recovery performance within 60–100 s with an applied voltage of 16–70 V. However, none of these materials showed load-bearing properties. Nevertheless, Yip. et al. [61] prepared high-performance robotic muscles from conductive polyamide 6,6 sewing thread. The nylon 6,6 sewing thread was made conductive by coating it with electric heating, while using the same method as Haines et al. [62]. By using this concept, they prepared a robotic hand with 3D-printed ABS (Acrylonitrile Butadiene Styrene) material. A flexural design with conduits for a tendon was used with supercoiled polymer (SCP) actuators on each tendon (for actuation).
These actuators provided a strain of approximately 10–15% to produce a full range of motion. To mimic the physical location of these muscles in a human arm, they spread them along the forearm of the robot. Further, to cool the actuators during relaxation, four computer fans were used. The power to weight ratio demonstrated by these muscles was 5.38 kW/kg, which is 17 times the power to weight ratio of mammalian skeletal muscles. The grasps were performed within a second without the need for a feedback sensor and with no noticeable crosstalk between actuators. Most recently, Peng’s group [63] prepared a 3D porous network composite material (Figure 5). The porous nanotube served as a built-in integral conductive network, which provided homogenous in-situ Joule heating for the composite polymer. By using this basic concept, they used the material to prepare an inchworm-like robot. The basic design of the robot was that thin metal plates were fixed to both sides of the polymer composites as legs to increase the size of each step (Figure 5). They designed a particular track with a metal sawtooth-like structure. The locomotion of the robot involved releasing and grasping of the front and rear sets of legs. This is because when the robot releases its legs, the rear legs are then stuck to the metal sawtooth, and the front legs push the robot in the forward direction. After grasping, the front leg is hooked on the sawtooth and pulls the rear leg forward. This movement is repeated continuously, in analogy to inchworm locomotion, by cyclic releasing and grasping of the front and back legs. The total time required for a complete cycle was 120 s with an alternating voltage of 2 V and 8 V. The locomotion observed for the inchworm robot was 8 mm in a total time of 10 min, which further increased to 1.2 cm in 10 min when the cycling time was set to 40 s (Figure 5c). These robots were considered to have profound potential with numerous advantages, such as their simple structure, light weight, and low cost, with designable parameters including speed, frequency, and length.
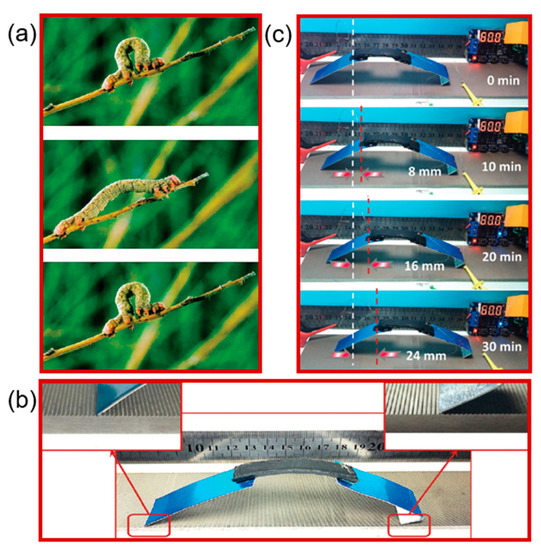
Figure 5. Application of an electro-active shape-memory polymer composite to an inchworm robot. (a) Photographs of inchworm locomotion. (b) Illustration of a designed inchworm robot with a double layer CNT–SMP composite in connection with two metal plates as moving legs. (c) Snapshots of an inchworm-type robot in locomotion. It has moved over 24 mm in 30 min (Reprinted (adapted) with permission [63]. Copyright (2016) Royal Society of Chemistry).
3. Concluding Remarks with Future Perspectives
Exciting properties of SMPs have endowed these materials with desirable utility for artificial muscle applications. In the past, most of the applications were based on SMP actuators. However, along with the development of SMP programming methods, cross-linking methods (in various combinations) and different trigger methods suggest that more applications in the form of artificial muscles, robotic fingers, deployable devices, and robotics can be realized. Fundamentally, SMP artificial muscles are providing a new alternative to natural muscles by imitation, which inspires and challenges the material scientists to untangle the structure–property and application relationships. It is intriguing to see that the artificial muscle performance in some cases exceeds that of natural muscles, which depends not only on the intrinsic properties of these materials but also on the actuation mechanisms, miniaturization and specific design. Aside from the significant progress in SMP artificial muscles, some continuous effort should be put into the following aspects of SMPs and composites, which have been mostly unexplored to date.
Among existing SMPs, polycaprolactone, polyurethane, specific epoxy resin and LCEs are often used as artificial muscles, presumably because these materials have a crystalline domain, which induces the shape-memory phenomenon. Exploration of new polymer systems with similar properties to these materials may lead to new functionalities and applications in the field of artificial muscles.
It is generally accepted that SMP artificial muscles usually mimic human muscles, but there is a lack of SMPs that mimic the strength associated with the actuation of humanoid muscles. Therefore, appropriate methods are needed to quantitatively assess the contribution of different factors that affect the mechanical performance of polymer-based actuators.
A large effort has been devoted to controlling the load-bearing performance of SMP artificial muscles, but little is known about how to develop millions of reversible contractions with rapid load-bearing abilities. Distinguishing different SMP networks would help greatly in understanding better the structure–property relationship and reversible relaxation abilities with maximum cycles.
Current knowledge of SMP artificial muscles is generally based on shape-memory polymer networks and their composites with thermal or electrical actuation. However, little is known about LCEs and their regular systems. Therefore, thorough study is needed to address many questions related to LEC-based SMP artificial muscles, activated either thermally, electrically, or by light.
Limited fatigue resistance and cracks on the surface of these materials is a significant limitation at the current stage. Therefore, the combination of these materials with self-healing materials may provide a possible solution to the development of new self-healing or self-recovery SMP artificial muscles.
Combined with the load lifting performance, the development of new multifunctional artificial muscles with opto-active or magneto-active shape-memory performance in a miniaturized form is still a big challenge. Despite many attempts for the most common applications of SMP artificial muscles, the actual arrangement of these in robotic design is one of the highly essential issues that need to be taken into account.
Furthermore, the electrical actuation of the electro-active SMPs is carried out by dispersion of fillers, for example, CNTs in the polymer network. Sometimes, weak linkages of these fillers in a polymer chain may induce defects that significantly reduce the strength. Therefore, better annealing and optimized synthesis conditions are required to overcome these defects and junctions between the nanotube yarns in the polymer networks.
How to effectively dissipate the heat when the SMPs are restored to the original shape is also a big challenge. This is critical to load-bearing two-way SMPs with many shape-changing cycles. Hence, the investigation of SMPs should be combined with new technologies of thermal management, which will bring SMP research closer to real applications.
References
- Feinberg, A.W.; Feigel, A.; Shevkoplyas, S.S.; Sheehy, S.; Whitesides, G.M.; Parker, K.K. Muscular Thin Films for Building Actuators and Powering Devices. Science 2007, 317, 1366–1370.
- Madden, J.D.W. Mobile Robots Motor Challenges and Materials Solutions. Science 2007, 318, 1094–1097.
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R. Polymer artificial muscles. Mater. Today 2007, 10, 30–38.
- Rehman, H.U.; Chen, Y.; Hedenqvist, M.S.; Li, H.; Xue, W.; Guo, Y.; Guo, Y.; Duan, H.; Liu, H. Self-Healing Shape Memory PUPCL Copolymer with High Cycle Life. Adv. Funct. Mater. 2017, 28, 1704109.
- Lima, M.D.; Li, N.; De Andrade, M.J.; Fang, S.; Oh, J.; Spinks, G.M.; Kozlov, M.G.; Haines, C.S.; Suh, D.; Foroughi, J.; et al. Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles. Science 2012, 338, 928–932.
- Park, S.-J.; Gazzola, M.; Park, K.S.; Di Santo, V.; Blevins, E.L.; Lind, J.U.; Campbell, P.H.; Dauth, S.; Capulli, A.K.; Pasqualini, F.S.; et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016, 353, 158–162.
- Wang, C.; Sim, K.; Chen, J.; Kim, H.; Rao, Z.; Li, Y.; Chen, W.; Song, J.; Verduzco, R.; Yu, C. Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots. Adv. Mater. 2018, 30, 1706695.
- Ratna, D.; Karger-Kocsis, J. Recent advances in shape memory polymers and composites A review. J. Mater. Sci. 2007, 43, 254–269.
- Sahoo, N.G.; Jung, Y.C.; Goo, N.S.; Cho, J.W. Conducting Shape Memory Polyurethane-Polypyrrole Composites for an Electroactive Actuator. Macromol. Mater. Eng. 2005, 290, 1049–1055.
- Sahoo, N.G.; Jung, Y.C.; Yoo, H.J.; Cho, J.W. Influence of carbon nanotubes and polypyrrole on the thermal, mechanical and electroactive shape-memory properties of polyurethane nanocomposites. Compos. Sci. Technol. 2007, 67, 1920–1929.
- Meng, H.; Li, G. A review of stimuli-responsive shape memory polymer composites. Polymer 2013, 54, 2199–2221.
- Mirvakili, S.M.; Hunter, I.W. Multidirectional Artificial Muscles from Nylon. Adv. Mater. 2016, 29, 1604734.
- Li, Z.; Huang, R.; Liu, Z. A Periodic Deformation Mechanism of a Soft Actuator for Crawling and Grasping. Adv. Mater. Technol. 2019, 4, 1900653.
- Thakur, V.; Ding, G.; Ma, J.; Lee, P.S.; Lu, X. Hybrid Materials and Polymer Electrolytes for Electrochromic Device Applications. Adv. Mater. 2012, 24, 4071–4096.
- Yan, Y.; Santaniello, T.; Bettini, L.G.; Minnai, C.; Bellacicca, A.; Porotti, R.; Denti, I.; Faraone, G.; Merlini, M.; Lenardi, C.; et al. Electroactive Ionic Soft Actuators with Monolithically Integrated Gold Nanocomposite Electrodes. Adv. Mater. 2017, 29, 1606109.
- Brochu, P.; Pei, Q. Advances in Dielectric Elastomers for Actuators and Artificial Muscles. Macromol. Rapid Commun. 2010, 31, 10–36.
- Chen, T.; Bilal, O.R.; Shea, K.; Daraio, C. Harnessing bistability for directional propulsion of soft, untethered robots. Proc. Natl. Acad. Sci. USA 2018, 115, 5698–5702.
- Mao, Y.; Yu, K.; Isakov, M.S.; Wu, J.; Dunn, A.P.M.L.; Qi, H.J. Sequential Self-Folding Structures by 3D Printed Digital Shape Memory Polymers. Sci. Rep. 2015, 5, 13616.
- Lan, X.; Liu, Y.; Lv, H.; Wang, X.; Leng, J.; Du, S. Fiber reinforced shape-memory polymer composite and its application in a deployable hinge. Smart Mater. Struct. 2009, 18, 24002.
- Leng, J.; Lan, X.; Liu, Y.; Du, S. Shape-memory polymers and their composites: Stimulus methods and applications. Prog. Mater. Sci. 2011, 56, 1077–1135.
- Lin, J.; Knoll, C.; Willey, C. Shape Memory Rigidizable Inflatable (RI) Structures for Large Space Systems Applications. In Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Newport, RI, USA, 1–4 May 2006.
- Cherubini, A.; Moretti, G.; Vertechy, R.; Fontana, M. Experimental characterization of thermally-activated artificial muscles based on coiled nylon fishing lines. AIP Adv. 2015, 5, 067158.
- Inomata, K.; Nakagawa, K.; Fukuda, C.; Nakada, Y.; Sugimoto, H.; Nakanishi, E. Shape memory behavior of poly(methyl methacrylate)-graft-poly(ethylene glycol) copolymers. Polymer 2010, 51, 793–798.
- Rehman, H.U.; Chen, Y.; Hedenqvist, M.S.; Pathan, R.; Liu, H.; Wang, H.; Chen, T.; Zhang, X.; Li, H. High-cycle-life and high-loading copolymer network with potential application as a soft actuator. Mater. Des. 2019, 182, 108010.
- Xie, H.; Li, L.; Deng, X.-Y.; Cheng, C.-Y.; Yang, K.-K.; Wang, Y.-Z. Reinforcement of shape-memory poly(ethylene-co-vinyl acetate) by carbon fibre to access robust recovery capability under resistant condition. Compos. Sci. Technol. 2018, 157, 202–208.
- Xie, H.; Li, L.; Cheng, C.-Y.; Yang, K.-K.; Wang, Y.-Z. Poly (ethylene-co-vinyl acetate)/graphene shape-memory actuator with a cyclic thermal/light dual-sensitive capacity. Compos. Sci. Technol 2019, 173, 41–46.
- Gelebart, A.H.; Mulder, D.J.; Varga, M.; Konya, A.; Vantomme, G.; Meijer, E.W.; Selinger, R.L.B.; Broer, D.J.; Varga, M. Making waves in a photoactive polymer film. Nature 2017, 546, 632–636.
- Kortekaas, L.; Browne, W.R. The evolution of spiropyran: Fundamentals and progress of an extraordinarily versatile photochrome. Chem. Soc. Rev. 2019, 48, 3406–3424.
- Han, B.; Zhang, Y.; Zhu, L.; Li, Y.; Ma, Z.; Liu, Y.; Zhang, X.; Cao, X.; Chen, Q.-D.; Qiu, C.-W.; et al. Plasmonic-Assisted Graphene Oxide Artificial Muscles. Adv. Mater. 2018, 31, 1806386.
- Cheng, X.; Sun, R.; Yin, L.; Chai, Z.; Shi, H.; Gao, M. Light-Triggered Assembly of Gold Nanoparticles for Photothermal Therapy and Photoacoustic Imaging of Tumors In Vivo. Adv. Mater. 2016, 29, 1604894.
- Wang, Y.; Deng, Y.; Luo, H.; Zhu, A.; Ke, H.; Yang, H.; Chen, H. Light-Responsive Nanoparticles for Highly Efficient Cytoplasmic Delivery of Anticancer Agents. ACS Nano 2017, 11, 12134–12144.
- Bléger, D.; Hecht, S. Visible-Light-Activated Molecular Switches. Angew. Chem. Int. Ed. 2015, 54, 11338–11349.
- Ube, T.; Ikeda, T. Photomobile Polymer Materials with Complex 3D Deformation, Continuous Motions, Self-Regulation, and Enhanced Processability. Adv. Opt. Mater. 2019, 7.
- Zhao, J.; Cheng, F.; Yu, Y. Light-responsive actuation materials based on the photodeformable liquid crystal polymers. In Proceedings of the SPIE Nanoscience and Engineering Conference, San Diego, CA, USA, 21–25 August 2011; p. 810705.
- Dong, L.; Zhao, Y. Photothermally driven liquid crystal polymer actuators. Mater. Chem. Front. 2018, 2, 1932–1943.
- Ube, T.; Ikeda, T. Photomobile Polymer Materials with Complex 3D Deformation, Continuous Motions, Self-Regulation, and Enhanced Processability. Adv. Opt. Mater. 2019, 7
- Pang, X.; Lv, J.; Zhu, C.; Qin, L.; Yu, Y. Photodeformable Azobenzene-Containing Liquid Crystal Polymers and Soft Actuators. Adv. Mater. 2019, 31, e1904224.
- Oliver, K.; Seddon, A.; Trask, R.S. Morphing in nature and beyond: A review of natural and synthetic shape-changing materials and mechanisms. J. Mater. Sci. 2016, 51, 10663–10689.
- Datta, S.; Henry, T.; Hall, A.; Chattopadhyay, A. Carbon Nanotube Enhanced Shape Memory Polyurethane for Improved Mechanical Properties and Shape Recovery. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2233.
- Kim, J.; Jeong, H.J.; Park, H.-C.; Jeong, H.; Bae, S.; Kim, B.K. Electroactive shape memory performance of polyurethane/graphene nanocomposites. React. Funct. Polym. 2015, 88, 1–7.
- Gong, X.; Liu, L.; Liu, Y.; Leng, J. An electrical-heating and self-sensing shape memory polymer composite incorporated with carbon fiber felt. Smart Mater. Struct. 2016, 25, 35036.
- Cheng, H.K.F.; Basu, T.; Sahoo, N.G.; Li, L.; Chan, S. Current Advances in the Carbon Nanotube/Thermotropic Main-Chain Liquid Crystalline Polymer Nanocomposites and Their Blends. Polymer 2012, 4, 889–912.
- Bar-Cohen, Y. Electroactive polymers as artificial muscles—Reality and challenges. In Proceedings of the 19th AIAA Applied Aerodynamics Conference, Anaheim, CA, USA, 11–14 June 2001; p. 1492.
- Stoychev, G.V.; Ionov, L. Actuating Fibers: Design and Applications. ACS Appl. Mater. Interfaces 2016, 8, 24281–24294.
- Cho, J.W.; Kim, J.W.; Jung, Y.C.; Goo, N.S. Electroactive Shape-Memory Polyurethane Composites Incorporating Carbon Nanotubes. Macromol. Rapid Commun. 2005, 26, 412–416.
- Zhao, Y.; Hu, C.; Hu, Y.; Cheng, H.; Shi, G.; Qu, L. A Versatile, Ultralight, Nitrogen-Doped Graphene Framework. Angew. Chem. Int. Ed. 2012, 51, 11371–11375.
- Xu, Z.; Ding, C.; Wei, D.-W.; Bao, R.-Y.; Ke, K.; Liu, Z.; Yang, M.-B.; Yang, W. Electro and Light-Active Actuators Based on Reversible Shape-Memory Polymer Composites with Segregated Conductive Networks. ACS Appl. Mater. Interfaces 2019, 11, 30332–30340.
- Liu, T.; Huang, M.; Li, X.; Wang, C.; Gui, C.-X.; Yu, Z.-Z. Highly compressible anisotropic graphene aerogels fabricated by directional freezing for efficient absorption of organic liquids. Carbon 2016, 100, 456–464.
- Zhou, J.; Li, H.; Liu, W.; Dugnani, R.; Tian, R.; Xue, W.; Chen, Y.; Guo, Y.; Duan, H.; Liu, H. A facile method to fabricate polyurethane based graphene foams/epoxy/carbon nanotubes composite for electro-active shape memory application. Compos. Part A 2016, 91, 292–300.
- Zhan, H.; Garrett, D.J.; Apollo, N.V.; Ganesan, K.; Lau, D.; Prawer, S.; Cervenka, J. Direct fabrication of 3D graphene on nanoporous anodic alumina by plasma-enhanced chemical vapor deposition. Sci. Rep. 2016, 6, 19822.
- Liu, X.; Li, H.; Zeng, Q.; Zhang, Y.; Kang, H.; Duan, H.; Guo, Y.; Liu, H. Electro-active shape memory composites enhanced by flexible carbon nanotube/graphene aerogels. J. Mater. Chem. A 2015, 3, 11641–11649.
- Mohan, R.; Subha, J.; Alam, J. Influence of Multiwalled Carbon Nanotubes on Biodegradable Poly(lactic acid) Nanocomposites for Electroactive Shape Memory Actuator. Adv. Polym. Technol. 2016, 37, 256–261.
- Alam, J.; Khan, A.; Alam, M.; Raja, M. Electroactive Shape Memory Property of a Cu-decorated CNT Dispersed PLA/ESO Nanocomposite. Materials 2015, 8, 6391–6400.
- Zhang, Z.-X.; Wang, W.-Y.; Yang, J.-H.; Zhang, N.; Huang, T.; Wang, Y. Excellent Electroactive Shape Memory Performance of EVA/PCL/CNT Blend Composites with Selectively Localized CNTs. J. Phys. Chem. C 2016, 120, 22793–22802.
- Wang, Y.; Ma, T.; Tian, W.; Ye, J.; Wang, X.; Jiang, X.; Lin, L.; Yao, Y. Electroactive shape memory properties of graphene/epoxy-cyanate ester nanocomposites. Pigment. Resin Technol. 2018, 47, 72–78.
- Dorigato, A.; Pegoretti, A. Evaluation of the shape memory behavior of a poly(cyclooctene) based nanocomposite device. Polym. Eng. Sci. 2017, 58, 430–437.
- Wang, X.; Sparkman, J.; Gou, J. Electrical actuation and shape memory behavior of polyurethane composites incorporated with printed carbon nanotube layers. Compos. Sci. Technol. 2017, 141, 8–15.
- Liu, W.; Chen, H.; Ge, M.; Ni, Q.-Q.; Gao, Q. Electroactive shape memory composites with TiO2 whiskers for switching an electrical circuit. Mater. Des. 2018, 143, 196–203.
- Li, X.; Wang, L.; Zhang, Z.; Kong, D.; Ao, X.; Xiao, X. Electroactive High-Temperature Shape Memory Polymers with High Recovery Stress Induced by Ground Carbon Fibers. Macromol. Chem. Phys. 2019, 220.
- Sun, Y.; Chu, M.; Huang, M.; Hegazi, O.; Naguib, H.E. Hybrid Electroactive Shape Memory Polymer Composites with Room Temperature Deformability. Macromol. Mater. Eng. 2019, 304, 1900196.
- Yip, M.C.; Niemeyer, G. High-performance robotic muscles from conductive nylon sewing thread. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2313–2318.
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; De Andrade, M.J.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872.
- Peng, Q.; Wei, H.; Qin, Y.; Lin, Z.; Zhao, X.; Xu, F.; Leng, J.; He, X.; Cao, A.; Li, Y. Shape-memory polymer nanocomposites with a 3D conductive network for bidirectional actuation and locomotion application. Nanoscale 2016, 8, 18042–18049.



