 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Harish Chander | + 3791 word(s) | 3791 | 2020-05-28 10:55:38 | | | |
| 2 | Nicole Yin | -3 word(s) | 3788 | 2020-06-04 03:05:40 | | | | |
| 3 | Nicole Yin | -24 word(s) | 3764 | 2020-11-06 04:52:27 | | |
Video Upload Options
Wearable sensors are beneficial for continuous health monitoring, movement analysis, rehabilitation, evaluation of human performance. Wearable stretch sensors are increasingly being used for human movement monitoring. The content presented provides a review of wearable stretch sensors as well the design, development and validation of a wearable soft-robotic-stretch sensors.
1. Introduction
The wearable stretch sensors (WSS) have numerous applications that involve motion capture studies. For body strain measurements, these can be integrated onto clothing or directly laminated on human skin. Measurements ranging from minute skin motions induced by respiration and heartbeat to more significant human body strains like the bending or straightening of body joints can be obtained[1][2]. The information obtained from these sensors can be used to evaluate body movements, posture, and performance of the player during sports activities[2][3]. The information recorded could be useful for monitoring the body performance and wellness analysis of an individual. Another application of WSS involves mounting them on the knee joint[1][4][5]. This helps in gaining information about different knee patterns, such as walking, running, jumping, squatting, and various other activities. WSS are beneficial for continuous health monitoring, rehabilitation, and the evaluation of human performance.
2. Review of Wearable Stretch Sensors for Human Movement Monitoring
A brief review of a variety of such WSS and skin-mounted sensors with their broad applications in human motion detection have been summarized in Table 1. The review table surveys various studies conducted on the application of WSS that include both resistive and capacitive types of sensors. The table highlights the potential application of these wearable sensors as motion-capturing devices and comprises of a review of human movement monitoring, gait analysis, and other movement-based applications using such WSS. Table 1 also includes information about the current challenges and limitations in the use of skin mountable and wearable sensors for body-integrated applications[6][7][8][9][10][11][12][13][14][15][16][17][18][19].
Table 1. A review of different studies assessing human movement with the use of wearable stretch sensors with descriptions of the study applications, tests conducted, and findings, as well as limitations and future scope.
|
Study |
Uses/ Application |
Tests Conducted |
Findings |
Limitations |
Future Scope |
|
(Kramer et al., 2011)[6] |
Position measurement, motion detection, joint rotation incorporated in gloves to monitor hand motions |
Curvature sensing, stretch sensing, and combination of curvature and stress sensing. Finger positioned between 0° and 90° and the change in resistance was recorded. Two tests conducted: 1) the finger bends at 90° and stays there for a while: 2) rapid bending and straightening. No. of participants: n/a |
Elastomer based curvature sensors allow mechanically non-invasive measurements of human body motions and kinematics. Owing to high stretchability, the sensors conform to the host bending without interfering with the natural mechanics of motion. |
Accuracy of the sensor highly dependent on calibration, slight difference in calibration leads to drastic change. Changes in viscoelasticity of the sensor recorded |
Integration of hyper elastic pressure and curvature sensors with integrated circuit. Shape mapping elastomer sheets. |
|
(Huang et al., 2017)[8] |
Used in wrist rehabilitation, to increase the competitiveness of some sports by capturing and analyzing the joint motions, to obtain better effectiveness and accurate feedback of wrist motion for training in sports. |
Five Degree of Freedom tested: flexion, extension, pronation, supination, ulnar deviation. No. of participants: 4 |
A comfortable, portable and accurate wrist motion capture system. Decoupling algorithm proposed to solve the coupling problem of the measurements Used for analysis of athletic training performance, rehabilitation training, virtual reality system and control manipulators of robotic systems. |
Sliding of the sensors during skin deformation led to underestimation of the actual motion. Positioning repeatability is low. For the decoupling algorithm, if the Dielectric Elastomers (DES) system is worn by different people, the co-efficient matrix would change, and the system needs to be recalibrated. 2D measurement used in order to evaluate decoupling. |
Focus on improving the measurement precision and making the system more comfortable to wear. Integration of sensors into tight fitting clothing can help eliminate positioning errors of the sensor building of 3D motion evaluation system to validate decoupling algorithm. Optimizing the dimensions to of DES to maximize sensitivity. |
|
(Al-Nasri et al., 2019)[9] |
Studying the neck range motion for various neck related ailments. |
Participants fitted with the commercial stretch sensitive C-Stretch tape along the sternocleidomastoid muscle (SCM) on both sides of the neck with the wire-end of the tape closer to the clavicle. Participants were asked to actively rotate their heads to the left from neutral and then right for a total of five left-to-right rotations. No. of participants: 2 |
Assessment of commercially available capacitive stretch sensitive sensors for real time monitoring of cervical range of motion. Usability of wearable sensors as a safe alternative to assess neck range of motion for clinical applications. |
Anthropometric variables do not allow optimal use of sensor position and type for capturing joint motion. The length of sensor does not exceed to the full length of the sternocleidomastoid muscle for most people |
Safe alternative to assess real world neck range of motion for clinical application. Protocol for adhesion with a larger sample size to reduce the accuracy error below the acceptable threshold. Implementation of a more accurate method for fitting curvilinear nature of movements involved in rotations. |
|
(Shen et al., 2016)[7] |
Clinical use for finger kinematic analysis and hand function evaluation. |
Sensing materials’ ability to bend and stretch are tested. Repeatability is tested. No. of participants: n/a |
An analytical study to design the sensor with bending and stretching features enabling the sensor to be implemented in measuring human motions where a large amount of skin stretch is involved. Two sensor gloves designed and fabricated based on the proposed soft bending sensor for different applications. |
Hysteresis and visible fluctuations observed, caused by sensor elongation and unstable connection. |
Improve repeatability by reducing hysteresis and introducing new algorithm. Using the same system to measure bending angles of wrist and elbow. |
|
(Totaro et al., 2017)[10] |
Used to address joint motion detection in and off sagittal plane. The capacitive elements are sensitive to pressure solicitations allowing discrimination between strain and pressure. In rehabilitation field, can be used to provide feedback about abnormal postures. Can be used to monitor and improve athlete's performance and track user movement in gaming. |
For knees: Standing, sitting, squatting, running, walking. For ankle: dorsi/ plantar flexion, adduction/ abduction, complete foot rotation. No. of participants: n/a |
Smart garments developed for lower limb motion detection embedded with readout electronics for retrieving movement of specific joint. Smart anklet designed to address joint motion detection in and off sagittal plane. Garments show high accuracy in movement detection with root mean square error less than 4° in worst case situation. |
Sliding of braces after activities. Washability of the modules. Partial detachment of sensors due to the stress induced by the movements |
Development of customized smartphone application, which helps guiding the user on different positions of foot needed for calibration, acquire sensor outputs and implement polynomial fitting for measuring full ranges. Using five sensors at the knee to detect internal/external rotation, and its abduction/adduction angles. Sewing of fabric conductive electrodes into the garment to isolate it from the user and outside world. Using knee & ankle modules together to provide biomechanical information about lower limb movement. |
|
(Kim et al., 2019)[11] |
Use of deep learning for full body motion sensing, biomechanics study and rehabilitation. Use of Deep Full Body Motion Network (DFM-Net) |
Three types of activity data set: squats, bend and reach and windmill motion, four sets of each. Use of deep neural networks. No. of participants: n/a |
Use of deep learning for full body motion sensing, significantly increasing efficiency in calibration of the soft sensor and estimation of body motions. Deep learning-based calibration and mapping method shows a higher accuracy than traditional methods based on mathematical estimations. |
Nonlinearity in response and hysteric loops during flexion and extension of knee joint. Alignment, anchorage and deformation of human body resulting in difference in magnitude and pattern as well as noise in the output signals from shoulder joints. |
Development of an improved calibration model that can reuse pre-trained model parameters to simplify calibration procedures. |
|
(Yi et al., 2015)[16] |
A stretchable-rubber-based (SR-based) triboelectric nanogenerator (TENG) device, integrated into a sensor system, capable of detecting movements in different directions. The SR-based TENG attached to the body to detect breathing and joint motion |
The SR-based TENG exploits the shape/length expansion of the rubber, which induces an in-plane charge separation and results in a potential output current produced by periodically stretching and releasing the rubber. This unique working principle of TENG was confirmed by numerical calculations and controlled experiments. No. of participants: n/a |
Based on its motion sensing capability and high elasticity of the rubber, the SR-based TENG can be mounted onto a human body; and a self-powered health monitoring system could be realized for detections of physiological activities and joint movements. The SR based TENG can distinguish the bending angle of the knee, and accurate bending rate of the knee can also be acquired. |
The theoretical vertical gap between the rubber and aluminum affects the charge transfer process. |
New design opportunities for TENG with great potential for applications in robotics, entertainment, sports, medical diagnosis, medical treatment. Act as functional sensor to detect various kinds of signals. |
|
(Liao et al., 2019)[19] |
Strain sensors with both high stretchability and high sensitivity, fabricated based on cluster-type microstructures (CM) by using nozzle jet printing method. |
Test were conducted by applying 00% and 160% stretching strains, to confirm the robustness of CM sensors. CM sensors were attached to multiple limb joints to monitor their activity. Knee bending detection was performed by the CM sensors, including bending, half bending and straight states. No. of participants: n/a |
The CM strain sensor possesses a high gauge factor up to 2700 and a wide sensing range of 160% strain. Rapid response time is 18ms and response stability > 10,000 strain cycles were conductive to CM strain sensor to perform well in both static and dynamic conditions. The sensor yields a significant information about joint movement. |
The materials and devices fabrication are a tedious process. The materials are required to be pre-stretched before nozzle jet print machine deposits silver ink. |
Can be envisioned and expanded further to the exploitation of wearable electronics. Developing fiber-based sensors to achieve higher performances in future. |
|
(Chen et al., 2016)[15] |
Strain sensors with ultra-high sensitivity under microstrain having numerous potential applications in heartbeat monitoring, pulsebeat detection, sound signal acquisition and recognition. |
Novel hybrid particles through coprecipitating silver nanowires (AgNWs) and graphene oxides (GO) were fabricated and two-part strain sensor was developed after a simple reduction, vacuum filtration and casting process. Cycle testing was taken for strain sensors under three different strains to investigate its practical application for sensing. No. of participants: n/a |
The strain sensors show good response to bending, high strain resolution and high working stability and successfully used in detection of microstrain such as daily physical vibrations, wrist pulses, and sound signal recognition. Sensing mechanism under strain results in high gauge factor of the strain sensor. The strain sensors have an accurate response on various strains and good mechanical stability. |
Any difference in AgNWs and GO proportions can lead to errors in coprecipitation. |
Applications in sensing bending deformations. Can be used in detection of physiological signals and health monitoring. |
|
(Liao et al., 2018)[17] |
Intelligent glove assembly using textile strain sensors, capable of detecting and translating full range of fingers’ bending into wireless control commands. |
A wearable intelligent glove assembled with multiple textile strain sensors, using facile stencil printing method. A deformation and fracturing mechanism investigated to check the effects of loading and unloading on the strain sensors. Microcontroller unit used for signal conditioning and Bluetooth transceiver used for signal communication. Successful demonstrations conducted to detect short bending and long bending of fingers and hand gestures, towards human machine interface applications. No of participants: n/a |
The textile sensor possessed ultrahigh sensitivity with a relatively wide sensing range and gauge factor estimated to be approximately 2000. The textile strain sensors worked even when stretched up to 60% its original length. Simple signal processing unit with Bluetooth transceiver module allowing prompt transmission and translates fingers’ bending into wireless control commands. No additional signal conditioning required by the analog to digital converter circuit. |
Stencil printing has a limited sensing range, which may restrict their application. Fingers need to work in sequence and cannot work simultaneously, as the targeted subject is unable to identify the control commands from intelligent glove when all fingers are working at the same time. |
Higher sensitivity and larger detection range would be achieved by pre-stretching optimization processes of the textile. Development for future human-machine interface applications. Expanding the use of textile strain sensors in the field of Internet of Things. |
|
(Deng et al., 2019)[18] |
High stretchability and ultra-sensitivity of ultrasonic peeling vertical graphene/ polydimethylsiloxane (UP-VGr/PDMS) sensors can be applied to various kinds of human physiological signal detectors. The sensors can detect sound amplitude as well as sound frequency, that is recognize the timbre of a sound. |
Pull and compression tests, loading and unloading cycles to observe relative resistance changes. Analysis for human physiological signal detection – wrist bending, knee motions, different degrees of finger bending, pulse signal detection. Testing timbre recognition ability using cellphone as a sound source and applying continuous constant loudness soundwaves of varying frequencies. No. of participants: n/a |
The UP-VGr/PDMS strain sensors have high stretchability, up to 100% and high sensitivity (Gauge Factor>10,000 at 100% strain) the sensors have the ability of high timbre recognition without waveform distortion for frequencies as high as 2500Hz. Demonstrations presented to highlight the sensors’ potential as wearable device for human motion, pulse and sound timbre detection. |
Hysteresis behavior of strain sensor observed under loading cycles with 1 mm s-1 loading and unloading speeds. Little attenuation observed under unloading process. |
Owing to good response to small angular changes and relatively high sensitivity, the sensors can be used as a highly selective sound detector, such as speech pattern recognition system. Sensors with timbre recognition ability can be used for rehabilitation of hearing-impaired and speaking impaired people. |
|
(Liao et al., 2016)[14] |
Low cost stretchable, multifunctional sensor based on zinc oxide (ZnO) nanowires that can be stretched up to 150% and maintains the ability to detect strain, temperature and UV. |
Field emission scanning electron microscopy used to study the sensor under strain up to 120%. Electrical properties of the stretchable sensors under dynamic and static strain were investigated. Temperature sensitivity of the multifunctional sensor tested at various strain conditions. Photoelectric property of stretchable UV sensors evaluated under various strain conditions. No. of participants: n/a |
The electrical response of stretchable sensors remains unchanged through more than 10000 cyclic loading tests at 3Hz, possessing high stability and durability. The stretchable sensor shows high and stable signal-to-noise ratios. The stretchable temperature sensor under cyclic temperature tests between room temperature and 50°C, is thermally stable without any strain. As stretchable UV sensors, the electrical signals respond and reset slowly. |
Significant hysteresis behavior is observed associated with elastic loading. Maximum detection frequency is limited to 8Hz which is contingent on the contact-separation speed of the small pieces of ZnO nanowires debris. |
Obtain smaller cracks of ZnO nanowires debris to enhance the performance od the stretchable strain sensor. Potential application for temperature controlling devices and can be applied to a wide range of applications in human medical monitoring and sleep quality perception. Light weight and fiber shape of stretchable UV sensors paves a way to manufacture high stretchable and economical UV early warning devices and optical smart devices. |
|
(Lee et al., 2016)[12] |
Gesture recognition, motion monitoring, rotational angles of multi-axis joints. |
Two stretch sensors attached along the skin affected by the rotation of the joint. Calibration process necessary to determine sensor axes to reduce misalignment to the axis of rotation. Shoulder flexion/ extension and addiction/ abduction were estimated. No of participants: n/a |
A highly stretchable soft sensor which adheres to the skin directly to estimate multi axis joint rotation angles while providing comfortable physical interface. |
Estimated shoulder movement show hysteresis behavior that result in error for fast movements, owing to viscoelastic property of sensor. Error in the calibration observed due to twisting effect of arm since sensor is directly attached to the skin (curved surface of the shoulder), inaccuracy caused by calibration method, non-linearity of the sensor. |
The proposed system can be applied for motion monitoring system by direct attachment to skin without discomfort to the user. |
|
(Mengüç et al., 2014)[13] |
Study the hip, knee and ankle sagittal plane joint. Applications involve monitoring patient's gait pathology for providing rehabilitation assistance, augment human performance by reducing the work required from biological muscles. |
Tested in isolation for extreme extension to failure, moderate extension to 1500 cycles and extreme compression to failure. Three males under 30 tested for locomotion at 5 predefined speed over split belt treadmill. Kinematics collected using optical motion capture were synchronized to the data collected by the sensors, to validate the results obtained. No. of participants: 3 |
Systematic design and characterization of soft sensing suit for monitoring hip, knee and ankle sagittal plane joint angles. Developing soft sensing suit with careful consideration of interface between components such that the root means square error for walking at 0.89m/s was less than 5° and for running at 2.7m/s was less than 15°. |
Sensitivity to surface pressure, mechanical hysteresis observed. Cross sensitivity to compression. Electrical path being cut due to microchannel collapse on application of pressure during compression. Joint angle measurement deviations observed with increase in locomotion speed. |
Reduce material stiffness and mitigate compressor induced failure Using ionic liquids to improve biocompatibility as an alternative to liquid metal. Mechanically protecting sensors from redundant sensing to enable robust applications in field setting. Implication of a refined design with the use of discretized stiffness gradients to improve mechanical durability. |
Design and Development of Wearable Devices using Soft Robotic Stretch (SRS) Sensors for Human Movement Monitoring
While several wearable devices that incorporate different types of sensor technology exist for fall detection, they have their own limitations, such as inertial measurement unit (IMU) distortion, reliability, and high financial costs[20][21]. Moreover, there is a constant need for the design and development of novel wearable technology to combat the increasing threat of falls and fall-related injuries in occupational settings. Our research team was tasked with the design and development of a wearable device using soft-robotic stretch (SRS) sensors capable of capturing the human joint movement kinematics, specifically at the ankle joint in the lower extremity. The research team has since then published a series of five papers under the “Closing the Wearable Gap” series: Part I to Part V[22][23][24][25][26], which discuss the design, development, and testing of the foot and ankle wearable device. Specifically, the Parts I and II papers tested the reliability and feasibility of using SRS on both a mechanical ankle joint device and on human participants[22][23]. The SRS are thin strap-like electronic sensors that produce a linear change in voltage recorded either in resistance (LiquidWire, Beaverton, Oregon, USA) or capacitance (StretchSense, Auckland, NZ, USA) when they are stretched (Figure 1). Subsequently, when the SRS were fixed on the anterior, posterior, medial, and lateral sides of the foot and ankle segments spanning across the ankle joint axis, they stretch during all four degrees of freedom of the ankle joint, plantar flexion, dorsiflexion, eversion, and inversion movements, respectively. The change in voltage was correlated to the change in the ankle joint range of motion angles using traditional electric goniometers as well as using the gold standard 3D motion capture system. The results from these papers identified significant linear models and validated with significant goodness-of-fit when compared to the gold standard 3D motion capture system[22][23]. The linearity of the stretch from the SRS was reported to have an R2 value of 0.99 in the Part I paper and an R2 value of 0.95–0.99 in the Part II paper. Thus, the Parts I and II papers (Figure 2) demonstrated that the SRS sensors could be used as a potential wearable device to detect ankle joint kinematics in both sagittal and frontal movements of plantar flexion/dorsiflexion and inversion/eversion movements, respectively. However, the movements in these two studies were performed one at a time from a static, non-weight-bearing condition. The need for assessing the use of SRS sensors in dynamic movements, especially fall detection, was necessary. The critical advancement of studies exploring more complex movements lead to the Parts III, IV, and V papers (Figure 2)[24][25][26], the next projects investigated by the research team, which are explained further with in-context of WSS in fall detection, their applications, limitations, and future scope.
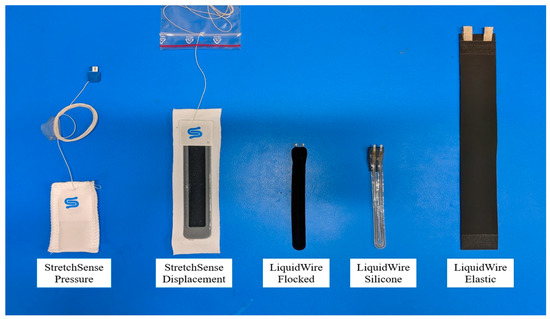
Figure 1. Different wearable stretch sensors used by the current research team. From left to right: (1) StretchSense Pressure Sensor, (2) StretchSense Displacement Sensor, (3) LiquidWire Flocked Sensor, (4) LiquidWire Silicone Sensor, and (5) LiquidWire Elastic Sensor.
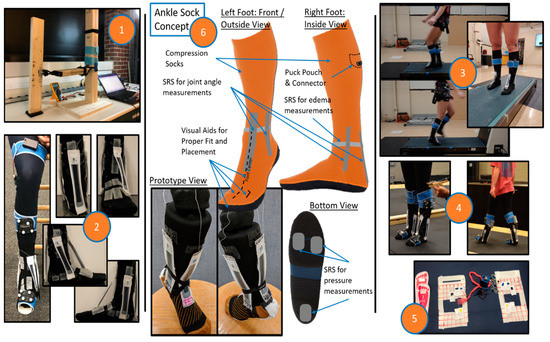
Figure 2. A pictorial representation of past and future works from the “Closing the Wearable Gap” (CWG) journal article series (Parts I to V). (1) CWG Part I—Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle, (2) CWG Part II—Sensor Orientation and Placement for Foot and Ankle Joint Kinematic Measurements, (3) CWG Part III—Use of Stretch Sensors in Detecting Ankle Joint Kinematics during Unexpected & Expected, Slip & Trip Perturbations, (4) CWG Part IV—3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment, (5) CWG Part V—Development of Pressure-Sensitive Sock Utilizing Soft Sensors, and (6) CWG—future iteration of an ankle sock concept to monitor human movement.
Although different types of sensors are being used for fall monitoring and detection, the placement of these sensors on the human body have been limited predominantly to the torso and lower extremities[27], and body-worn sensors used for fall detection have also been traditionally placed on the waist/hip or as trunk attachments[27]. Occasionally, wearable sensors such as accelerometers that are placed on the head and neck have also been utilized that detect the acceleration changes of the head in the event of falls[28]. However, based on the postural stability model suggested by Winter (1995), the human body is considered as an inverted pendulum, with the axis of rotation pivoted at the ankle joint[29]. Subsequently, placing the SRS sensors across the ankle joint axis allows the researchers to monitor the kinematics of the ankle joint complex from an inverted pendulum model aspect. The SRS sensors placed on the anterior aspect of the feet stretches during plantar flexion, while the one placed on the posterior aspect of the feet stretches during dorsiflexion. Similarly, the SRS sensor on the lateral aspect of the ankle stretches during inversion, and the one on the medial aspect stretches during eversion. Correlating the linear change in voltage due to the stretch of the SRS with changes in the ankle joint range of motion in degrees quantified using 3D motion capture enables constant monitoring of ankle joint kinematics during human physical activity.
References
- Morteza Amjadi; Ki-Uk Kyung; Inkyu Park; Metin Sitti; Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Advanced Functional Materials 2016, 26, 1678-1698, 10.1002/adfm.201504755.
- Coyle, S.; Morris, D.; Lau, K.-T.; Diamond, D.; Moyna, N. Textile-Based Wearable Sensors for Assisting Sports Performance. In Proceedings of the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; pp. 307–311.
- Lam Po Tang, S. 8—Wearable sensors for sports performance. In Textiles for Sportswear; Shishoo, R., Ed.; Woodhead Publishing Series in Textiles; Woodhead Publishing: Sawston, UK, 2015; pp. 169–196.
- Maria De Marsico; Alessio Mecca; A Survey on Gait Recognition via Wearable Sensors. ACM Computing Surveys 2019, 52, 1-39, 10.1145/3340293.
- Somruthai Poomsalood; Karthik Muthumayandi; Karen Hambly; Can stretch sensors measure knee range of motion in healthy adults?. Biomedical Human Kinetics 2019, 11, 1-8, 10.2478/bhk-2019-0001.
- Kramer, R.K.; Majidi, C.; Sahai, R.; Wood, R.J. Soft curvature sensors for joint angle proprioception. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1919–1926.
- Shen, Z.; Yi, J.; Li, X.; Lo, M.H.P.; Chen, M.Z.Q.; Hu, Y.; Wang, Z. A soft stretchable bending sensor and data glove applications. Robot. Biomim. 2016, 3, 22.
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable Stretch Sensors for Motion Measurement of the Wrist Joint Based on Dielectric Elastomers. Sensors 2017, 17, 2708.
- Al-Nasri, I.; Price, A.D.; Trejos, A.L.; Walton, D.M. A Commercially Available Capacitive Stretch-Sensitive Sensor for Measurement of Rotational Neck Movement in Healthy People: Proof of Concept. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 163–168.
- Totaro, M.; Poliero, T.; Mondini, A.; Lucarotti, C.; Cairoli, G.; Ortiz, J.; Beccai, L. Soft Smart Garments for Lower Limb Joint Position Analysis. Sensors 2017, 17, 2314.
- Kim, D.; Kwon, J.; Han, S.; Park, Y.-L.; Jo, S. Deep Full-Body Motion Network for a Soft Wearable Motion Sensing Suit. IEEEASME Trans. Mechatron. 2019, 24, 56–66.
- Lee, H.; Cho, J.; Kim, J. Printable skin adhesive stretch sensor for measuring multi-axis human joint angles. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4975–4980.
- Mengüç, Y.; Park, Y.-L.; Pei, H.; Vogt, D.; Aubin, P.M.; Winchell, E.; Fluke, L.; Stirling, L.; Wood, R.J.; Walsh, C.J. Wearable soft sensing suit for human gait measurement. Int. J. Robot. Res. 2014.
- Liao, X.; Liao, Q.; Zhang, Z.; Yan, X.; Liang, Q.; Wang, Q.; Li, M.; Zhang, Y. A Highly Stretchable ZnO@Fiber-Based Multifunctional Nanosensor for Strain/Temperature/UV Detection. Adv. Funct. Mater. 2016, 26, 3074–3081.
- Chen, S.; Wei, Y.; Wei, S.; Lin, Y.; Liu, L. Ultrasensitive Cracking-Assisted Strain Sensors Based on Silver Nanowires/Graphene Hybrid Particles. ACS Appl. Mater. Interfaces 2016, 8, 25563–25570.
- Yi, F.; Lin, L.; Niu, S.; Yang, P.K.; Wang, Z.; Chen, J.; Zhou, Y.; Zi, Y.; Wang, J.; Liao, Q.; et al. Stretchable-Rubber-Based Triboelectric Nanogenerator and Its Application as Self-Powered Body Motion Sensors. Adv. Funct. Mater. 2015, 25, 3688–3696.
- Liao, X.; Song, W.; Zhang, X.; Huang, H.; Wang, Y.; Zheng, Y. Directly printed wearable electronic sensing textiles towards human–machine interfaces. J. Mater. Chem. C 2018, 6, 12841–12848.
- Deng, C.; Gao, P.; Lan, L.; He, P.; Zhao, X.; Zheng, W.; Chen, W.; Zhong, X.; Wu, Y.; Liu, L.; et al. Ultrasensitive and Highly Stretchable Multifunctional Strain Sensors with Timbre-Recognition Ability Based on Vertical Graphene. Adv. Funct. Mater. 2019, 29, 1907151.
- Liao, X.; Wang, W.; Wang, L.; Tang, K.; Zheng, Y. Controllably Enhancing Stretchability of Highly Sensitive Fiber-Based Strain Sensors for Intelligent Monitoring. ACS Appl. Mater. Interfaces 2019, 11, 2431–2440.
- Daniel T. P. Fong; Yue-Yan Chan; The Use of Wearable Inertial Motion Sensors in Human Lower Limb Biomechanics Studies: A Systematic Review. Sensors 2010, 10, 11556-11565, 10.3390/s101211556.
- G. Cooper; Ian Sheret; Louise McMillan; Konstantinos Siliverdis; Ning Sha; Diana Hodgins; Laurence Kenney; David Howard; Inertial sensor-based knee flexion/extension angle estimation. Journal of Biomechanics 2009, 42, 2678-2685, 10.1016/j.jbiomech.2009.08.004.
- Tony Luczak; David Saucier; Reuben Burch; J.E. Ball; Harish Chander; Adam Knight; Pan Wei; Tashfin Iftekhar; Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle. Electronics 2018, 7, 117, 10.3390/electronics7070117.
- Saucier, D.; Luczak, T.; Nguyen, P.; Davarzani, S.; Peranich, P.; Ball, J.E.; Burch, R.F.; Smith, B.K.; Chander, H.; Knight, A.; et al. Closing the Wearable Gap—Part II: Sensor Orientation and Placement for Foot and Ankle Joint Kinematic Measurements. Sensors 2019, 19, 3509.
- Chander, H.; Stewart, E.; Saucier, D.; Nguyen, P.; Luczak, T.; Ball, J.E.; Knight, A.C.; Smith, B.K.; V, R.F.B.; Prabhu, R.K. Closing the Wearable Gap—Part III: Use of Stretch Sensors in Detecting Ankle Joint Kinematics During Unexpected and Expected Slip and Trip Perturbations. Electronics 2019, 8, 1083.
- Saucier, D.; Davarzani, S.; Turner, A.; Luczak, T.; Nguyen, P.; Carroll, W.; Burch, V.; Reuben, F.; Ball, J.E.; Smith, B.K.; et al. Closing the Wearable Gap—Part IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment. Electronics 2019, 8, 1382.
- Luczak, T.; Burch, V.; Reuben, F.; Smith, B.K.; Carruth, D.W.; Lamberth, J.; Chander, H.; Knight, A.; Ball, J.E.; Prabhu, R.K. Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors. Sensors 2020, 20, 208
- L. Schwickert; for the FARSEEING Consortium and the FARSEEING Meta Database Consensus Group; Clemens Becker; U. Lindemann; C. Marechal; A. Bourke; Lorenzo Chiari; J.L. Helbostad; W. Zijlstra; Kamiar Aminian; et al.Chris ToddS. BandinelliJochen Klenk Fall detection with body-worn sensors. Zeitschrift für Gerontologie und Geriatrie 2013, 46, 706-719, 10.1007/s00391-013-0559-8.
- Ulrich Lindemann; A. Hock; M. Stuber; W. Keck; C. Becker; Evaluation of a fall detector based on accelerometers: a pilot study.. Medical & Biological Engineering & Computing 2005, 43, 548-551, 10.1007/bf02351026.
- Da Winter; Human balance and posture control during standing and walking. Gait & Posture 1995, 3, 193-214, 10.1016/0966-6362(96)82849-9.

