Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
The driving range of electric vehicles (EVs) is still an important factor restricting their development. Although the rising battery energy density has reached a bottleneck, which is a key constraint, the drive energy management strategy also has a significant effect and can improve the driving range of EVs. Herein, the typical configurations of the dual-motor coupling drive system (DCDS) are introduced, and the power distribution strategies of the DCDS are comprehensively reviewed.
- electric vehicle
- energy efficiency
- power management
- independent drive
1. Introduction
Electric vehicles (EVs) are considered to be a significant solution to reduce air pollution caused by the transportation industry due to their zero-emission characteristics [1][2][3]. Meanwhile, EVs are also considered to be the best platform for autonomous vehicles because of their excellent control performance. However, the inadequate driving range of EVs is still a crucial constraint to their development [4]. The means to improve the driving range of EVs can be roughly summarized as design means and control means. The design means mainly refer to the design of the batteries, motors, and body structure of EVs, which are considered to be the fundamental means to increase the driving range of EVs. The control means mainly refer to the control of the vehicle subsystems, such as the braking system, steering system, and active suspension system, which could directly or indirectly reduce the driving energy, and they are generally quick-acting and effective means for improving the driving range of EVs.
2. Dual-Motor Coupling Drive System
The multi-motor coupling drive system (MCDS) is an electrical drive system that incorporates multiple motors coupled through a mechanical structure. This kind of drive system can optimize the working points of each motor by distributing power, torque, and speed among multiple motors to achieve energy conservation. Over the years, the MCDS has received widespread attention due to its energy conservation potential. Since two motors can almost fully release the energy conservation potential of the MCDS and more motors would not significantly improve the energy-saving effect due to possible increases in mass and cost, most of the research on MCDSs in recent years has focused on the dual-motor coupling drive system (DCDS). Therefore, this chapter mainly focuses on the DCDS.
2.1. Configuration of DCDS
There are three types of DCDSs based on their power coupling patterns: the dual-motor torque-coupling drive system (DTCDS), the dual-motor speed-coupling drive system (DSCDS), and the variable dual-motor coupling drive system (VDCDS). Each type has distinct configurations.
A characteristic of the DTCDS is that its output torque is the linear summation of the output torque of the two motors, and its output speed is proportional to the output speed of the two motors. Based on this characteristic, the efficiency of the DTCDS can be improved by distributing the output torque of the two motors to optimize the working points of each motor [5][6]. For a typical DTCDS, the output ends of the two motors are connected through a specially designed coupler or directly connected to the same element (Figure 1) so that the output torque of the drive system can be transferred freely between the two motors. Moreover, the DTCDS can switch between single-motor driving mode and dual-motor torque-coupling driving mode to reduce the transmission loss caused by the idle rotation of the non-driving motor, which can further improve the energy conservation potential of the DTCDS. This can be achieved through the utilization of clutches and the matching design of mechanical structures such as the reducer and coupler [7]. In addition, since torque coupling is the simplest power coupling pattern, the configuration of the DTCDS can be diverse. Broadly speaking, in addition to the typical DTCDS introduced above, the front-and-rear-independent-drive axle is also a kind of DTCDS.
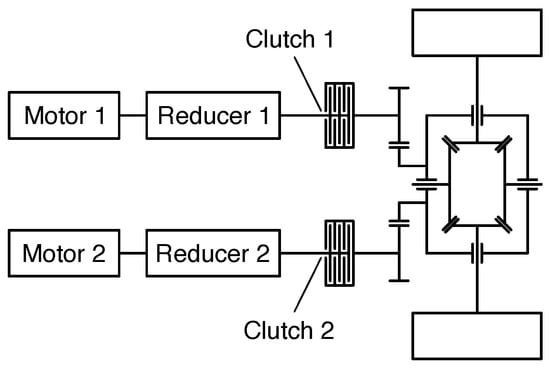
Figure 1. Schematic of typical DTCDS.
A characteristic of the DSCDS is that its output speed is the linear summation of the output speed of the two motors, and its output torque is proportional to the output torque of the two motors. Based on this characteristic, the DSCDS can flexibly optimize the working points of each motor by distributing the output speed of the two motors so that the efficiency of the DSCDS can be effectively improved. Since a planetary gear system is characterized by multiple degrees of freedom and a linear relationship between the speeds of each component, which fits the coupling requirements of the DSCDS quite well, it becomes the preferred coupler for the DSCDS. In a typical DSCDS, each of the two motors is connected to one of the input ends of a planetary gear system so that the output end of the planetary gear system can deliver the coupled power (Figure 2) [8][9][10][11]. Furthermore, the DSCDS can also switch between single-motor driving mode and dual-motor speed-coupling driving mode to provide more options for transmission ratio selection. This can be achieved through the utilization of brakes and the matching design of mechanical structures [12].
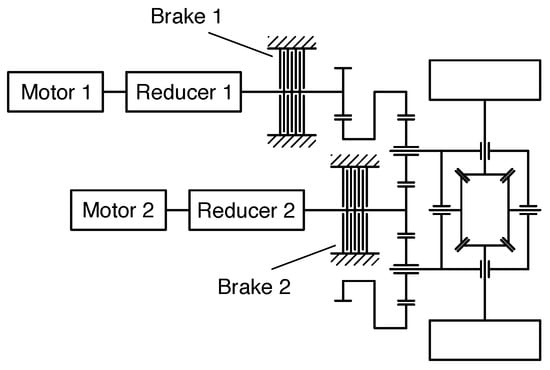
Figure 2. Schematic of typical DSCDS.
Table 1 shows the comparison of the DTCDS and DSCDS. Due to the different transmission system characteristics of the DTCDS and DSCDS, their coupling output torque and coupling output speed are different. Therefore, there are different optimization methods for the working point of the motors. Generally, the DTCDS can effectively improve the driving efficiency of EVs in the medium-speed low-torque and medium-speed medium-torque working states by optimizing the working points of the motors, while the DSCDS can effectively improve the driving efficiency of EVs in the low-speed medium-torque and high-speed medium-torque working states by optimizing the working points of the motors.
Table 1. Comparison of DTCDS and DSCDS.
| DCDS Configuration | Coupling Output Torque | Coupling Output Speed | Feasible Driving Modes |
|---|---|---|---|
| DTCDS | Linear summation of the output torque of the two motors | Proportional to the output speed of the two motors | Single-motor drive mode and dual-motor torque-coupling driving mode |
| DSCDS | Proportional to the output torque of the two motors | Linear summation of the output speed of the two motors | Single-motor drive mode and dual-motor speed-coupling driving mode |
In order to simultaneously achieve the beneficial effects of both the DTCDS and DSCDS, the VDCDS was designed. The VDCDS is capable of switching among various driving modes: single-motor drive, dual-motor torque-coupling drive, and dual-motor speed-coupling drive; this can be achieved through the implementation of complex mechanical structure with clutches, brakes, or some other actuators [13]. In some kinds of VDCDSs, hollow shaft motors are needed to achieve a more compact structure of the drive system and a better arrangement of mechanical components [14]. Figure 3 shows a novel VDCDS configuration proposed in [15], where the output shaft of motor 1 passes through the inner hole of the output shaft of motor 2 to achieve a coaxial arrangement. This VDCDS configuration can achieve four driving modes: motor 1 driving mode, motor 2 driving mode, dual-motor torque-coupling driving mode, and dual-motor speed-coupling driving mode; these can be switched by controlling three clutches and one brake. Through the study of parameter matching and the power distribution strategy, the energy conservation potential of this VDCDS configuration could reach about 10% compared to traditional single-motor drive systems.
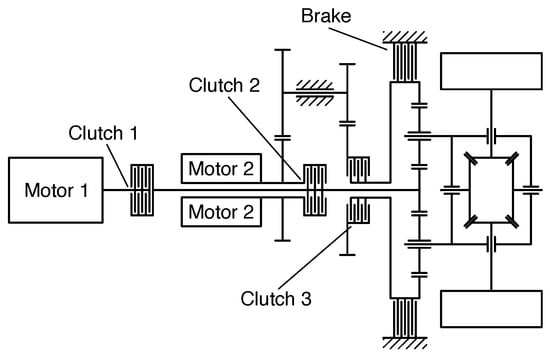
Figure 3. Schematic of a novel VDCDS.
2.2. Power Distribution Strategy of DCDS
To tap into the energy-saving potential of the MCDS, a power distribution strategy is essential. The primary objective of a power distribution strategy is to optimize the distribution of output power from each motor, which aims to enhance the efficiency of the drive system without compromising its performance. As shown in Figure 4, for the DCDS, the main effect of a power distribution strategy is the optimization of the working points of two motors, resulting in an effective improvement in the load of the motors. This ensures that the working points of the motors can operate more within the high-efficiency area of the motors, thereby improving the driving efficiency of the DCDS.
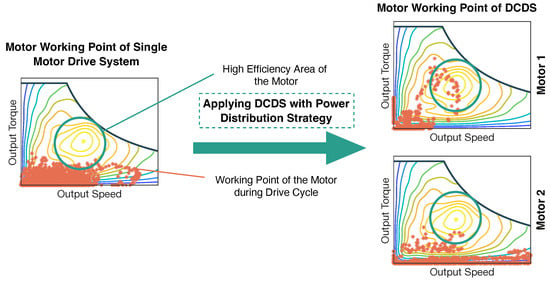
Figure 4. Working point optimization schematic of motors with power distribution strategy in DCDS.
As shown in Figure 5, the main function of the power distribution strategy in the DCDS is to determine the optimal driving mode and the optimal power distribution ratio of the two motors under different working conditions based on the required traction torque Ttd and the vehicle speed ua; a driving mode switching signal can then be to the clutches or brakes, and an output torque or output speed control signal can be sent to the two motors.
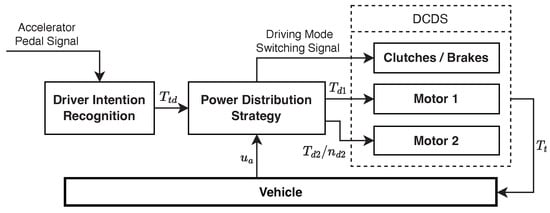
Figure 5. Typical power distribution control system of DCDS.
The simplest power distribution strategy for the DCDS is the rule-based strategy. This identifies the driving modes of the DCDS and the power distribution between motors using rules based on offline optimization, which takes the optimal electrical system efficiency as the optimization objective. This strategy does not rely on complex algorithms, so its computation cost is low, and it is suitable for implementation. However, the energy-saving effect of this strategy is not as good as expected when there are many control objectives in complex conditions. Some researchers improved this strategy and achieved better energy-saving effects. Ref. [16] improved the rule-based strategy by combining the two-parameter-based mode-switching control strategy and the power-split control strategy, which resulted in some energy-saving rate improvements. Ref. [17] designed a dual fuzzy controller to achieve optimal power distribution, in which the control rules of the system were optimized using a genetic algorithm to improve the control accuracy and optimization effect with multiple objectives.
Although the rule-based power distribution strategy already has a decent effect on energy conservation, there is still a certain gap between its control effect and the global optimal result. In order to further tap into the energy-saving potential of the DCDS, researchers have also conducted extensive research on power distribution strategies based on global optimization algorithms.
Among the global optimization algorithms, the dynamic programming (DP) algorithm has been extensively studied due to its simplicity and effectiveness [18][19]. However, DP has the disadvantage of excessive computation, and the real-time executability of the power distribution strategy based on DP tends to be poor when the control object model is complex. Moreover, the calculation process of DP requires the accurate vehicle motion states of the entire future driving process, which are difficult to accurately predict. This further affects the vehicle application of DP. Therefore, some researchers have focused on the optimization of the parameter update process, the improvement of the calculation efficiency, and the enhancement of the prediction accuracy of future vehicle motion states and combined DP with other optimization algorithms to improve its performance in the power distribution strategy. It should be noted that while some studies focused on optimizing DP for hybrid drive systems, these optimization approaches are also applicable to the DCDS.
Ref. [20] proposed an iterative DP approach that converges to the optimal control strategy within an adaptive multidimensional search space to reduce the computing time. Ref. [21] derived an analytic solution for the optimal torque-split decision at each point in time and the state grid by utilizing a local approximation of the gridded cost-to-go, which significantly reduced the computation time by orders of magnitude. Ref. [22] proposed a piecewise Markov-based velocity prediction method, which utilizes the acceleration sign to enhance the performance of the vehicle motion state prediction. Ref. [23] trained a radial basis function neural network based on the optimization results of DP, leading to a significant improvement in the real-time executability of the power distribution strategy.
This entry is adapted from the peer-reviewed paper 10.3390/su15097617
References
- Chan, C.C.; Wong, Y.S. The state of the art of electric vehicles technology. In Proceedings of the 4th International Conference on Power Electronics and Motion Control, Xi’an, China, 14–16 August 2004; pp. 46–57.
- Hofmann, J.; Guan, D.; Chalvatzis, K.; Huo, H. Assessment of electrical vehicles as a successful driver for reducing CO2 emissions in China. Appl. Energy 2016, 184, 995–1003.
- Zhan, W.; Wang, Z.; Deng, J.; Liu, P.; Cui, D.; Li, H. Analysis of influencing factors of carbon emission reduction in the driving stage of electric vehicles based on big data. Automot. Eng. 2022, 44, 1581–1590.
- Ali, A.M.; Moulik, B. On the role of intelligent power management strategies for electrified vehicles: A review of predictive and cognitive methods. IEEE Trans. Transp. Electrif. 2022, 8, 368–383.
- Hua, Y.; Zhang, J.; Wen, X. High power Dual Motor Drive System used in Fuel Cell vehicles. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008.
- Sorniotti, A.; Holdstock, T.; Everitt, M.; Fracchia, M. A Novel Clutchless Multiple–Speed Transmission for Electric Axles; University of Surrey: Guildford, UK; Warwick, UK; Volume 2, pp. 103–131.
- Hu, J.J.; Zheng, L.L.; Jia, M.X.; Zhang, Y.; Pang, T. Optimization and model validation of operation control strategies for a novel dual-motor coupling-propulsion pure electric vehicle. Energies 2018, 11, 754.
- Coronado, P.D.U.; Ahuett-Garza, H. Analysis of Energy Efficiency and Driving Range of Electric Vehicles Equipped with a Bimotor Architecture Propulsion System; Center for Innovation, Design and Technology, Tecnológico de Monterrey, Campus Monterrey: Monterrey, Mexico, 2014; Volume 6, pp. 152–177.
- Wu, X.; Yin, X. Control of a dual-motor coupling drive system on electric vehicles buses. Chin. High Technol. Lett. 2013, 23, 863–867.
- Zhang, C.; Wu, X.; Wang, Z.; Tian, Z. Mode switching control strategy of dual motors coupled driving on electric vehicles. J. Beijing Inst. Technol. 2011, 20, 394–398.
- Sun, D.; Chen, Z. Parameters matching and design of dual-drive electric vehicle transmission system under NEDC working conditions. Intern. Combust. Engines 2013, 4, 22–25, 39.
- Zhang, S.; Xiong, R.; Zhang, C.N.; Sun, F.C. An optimal structure selection and parameter design approach for a dual-motor-driven system used in an electric bus. Energy 2016, 96, 437–448.
- Wang, Y.; Sun, D.Y. Powertrain matching and optimization of dual-motor hybrid driving system for electric vehicle based on quantum genetic intelligent algorithm. Discrete Dyn. Nat. Soc. 2014, 2014, 11.
- Hu, M.H.; Zeng, J.F.; Xu, S.Z.; Fu, C.Y.; Qin, D.T. Efficiency study of a dual-motor coupling electric vehicles powertrain. IEEE Trans. Veh. Technol. 2015, 64, 2252–2260.
- Wang, J.; Liu, D.; Zhang, Y.; Sun, W.; Chu, L. Analysis of energy conservation potential of novel pure electric vehicle with dual motors configuration. J. Jilin Univ. 2016, 46, 28–34.
- Zhang, S.; Xiong, R.; Zhang, C.N. Pontryagin’s minimum principle-based power management of a dual-motor-driven electric bus. Appl. Energy 2015, 159, 370–380.
- Meng, X.; Wang, R.; Xu, Y. Torque distribution strategy of pure electric driving mode for dual planetary vehicle. J. Zhejiang Univ. 2020, 54, 2214–2223, 2246.
- Zhang, S.; Zhang, C.N.; Han, G.W.; Wang, Q.H. Optimal control strategy design based on dynamic programming for a dual-motor coupling-propulsion system. Sci. World J. 2014, 2014, 958239.
- Gao, Y.; Wang, W.; Li, Y. Optimization of control strategy for dual-motor coupling propulsion system based on dynamic programming method. In Proceedings of the the 3rd Annual Academic Meeting of Vehicle Control and Intelligence Professional Committee of China Association of Automation, Beijing, China, 21–22 September 2019.
- Wahl, H.-G.; Gauterin, F. An iterative dynamic programming approach for the global optimal control of hybrid electric vehicles under real-time constraints. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 1 December 2013.
- Larsson, V.; Johannesson, L.; Egardt, B. Analytic solutions to the dynamic programming subproblem in hybrid vehicle energy management. IEEE Trans. Veh. Technol. 2015, 64, 1458–1467.
- Lin, C.; Zhao, M.J.; Pan, H.; Shao, S. Energy management for a dual-motor coupling propulsion electric bus based on model predictive control. In Proceedings of the 10th International Conference on Applied Energy (ICAE), Hong Kong, China, 22–25 August 2018; pp. 2744–2749.
- Zhang, C.N.; Zhang, S.; Han, G.W.; Liu, H.P. Power management comparison for a dual-motor-propulsion system used in a battery electric bus. IEEE Trans. Ind. Electron. 2017, 64, 3873–3882.
This entry is offline, you can click here to edit this entry!