Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Electrical & Electronic
Due to its great advantages, revolutionary soft-computing-based control system design has attracted a lot of attention from researchers. The distinguished advantages of using soft computing techniques include their less solution costs, assurance of a solution and their viability. They can deal with difficult, nonlinear, and uncertain technical problems. In contrast to other methods, numerous researches have supported the viability of controller constructed on soft computing technique.
- soft computing techniques
- interconnected power systems
- load frequency control
- secondary frequency control
- smart grids
1. Introduction
The infiltration of renewable energy sources (RESs), the adoption of novel ideas like the smart grid, and the computerisation of power system regulators are based on apprehensive communication technologies and contributing to increase in the complexity of power systems [1]. The aforesaid factors have an unswerving impact on the security, stability, and functioning of the power systems. The voltage and frequency are the most crucial power system indices. Frequency regulation in PS has received a lot of consideration due to its importance [2]. Primary, secondary, and tertiary control are the standard divisions of frequency regulation. The governor droop often implements the principal frequency regulation, resulting in steady stated errors. The primary frequency control loop is accountable for recording the frequency variation before the under/over frequency protection relays are activated. The secondary control for controlling frequency in power systems is called AGC, often referred to as LFC. It has two main objectives: (i) keep the frequency within a desired range; and (ii) control the exchange of power via significant tie-lines between the two control areas.
The uncertainty of active power production is greatly raised as the level of infiltration of RESs—such as wind farms and solar plants in power networks—increases, resulting in frequency variations. Along with the stochastic nature of demand, this rise in active power fluctuation would cause the power system's frequency to oscillate sharply. Therefore, more reliable and ideal LFC techniques are required for use in future power systems in order to address such issues.
In interconnected power systems, there have been numerous control strategies proposed for LFC. Four categories of strategies can be made: (i) the design of PID controllers for regulating frequency and tie-lines power flows is the primary emphasis of classical control approaches; (ii) modern controls methods comprise best control strategy, i.e., adaptive control and sliding mode control; (iii) intelligent control strategies, i.e., fuzzy and neural network based controller; and (iv) soft computing-based methods for fine-tuning the parameters of controllers, which researchers have given a lot of attention to recently.
2. Various LFC Models and Optimisation Techniques
2.1. Single-Area Power System
Single area power system is a closely knit electrical area in which numbers of generators form a cohrent group. Figure 1 shows the representation is single area power system that consists of a governor, turbine, and generator.
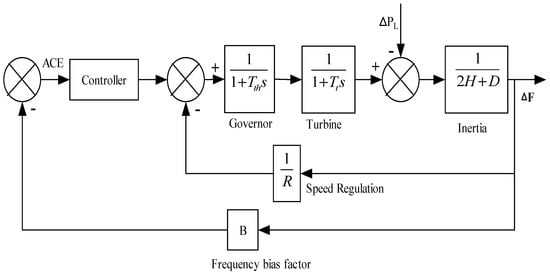
Figure 1. Generalised block diagram of single area LFC of reheat thermal based power system.
2.2. Two-Area Power System
A two-area power system is constructed using two different control areas connected through a tie-line. The linearised two area power system is presented in Figure 2. A summary of AGC used in two-area power systems (TAPS) is provided in [21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38]. References [21,22] study the influence of tie-lines models on the LFC of TAPS. In [25], the LFC models for TAPS that take voltage control loop effects on the frequency response are developed. In [27,28,29], frequency response models for TAPS that take into account the nonlinearities of the GRC and the GDB are proposed. References [23,38] present a discussion on how to simplify the frequency response model by reducing its complexity. The multi-source, two-area LFC models that take nonlinearities into account are highlighted in [29]. LFC models of TAPS with parametric and nonparametric disturbances are discussed in references [27,29,36].
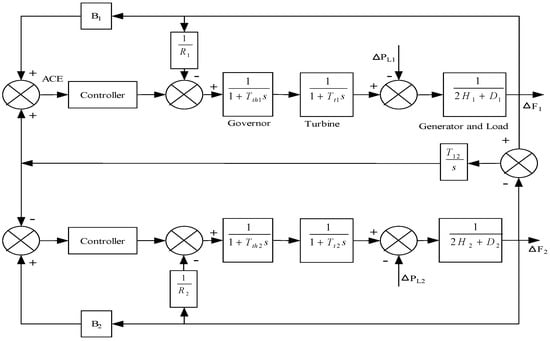
Figure 2. Generalised diagram of two area LFC of reheat thermal-based power system.
For deregulated electricity networks, various control strategies have been presented as the restructuring concept is adopted. In [69,70,71,72,73,74,75,76,77,78,79,80], LFC issues for deregulated power networks are discussed. A power system is separated into sections under deregulation so that each section has its own administrator. An independent system operator (ISO) is responsible for overseeing power distribution companies (DISCOs), power transmission companies (TRANSCOs), and power generation companies (GENCOs) in this regard [70,71,72,73]. The GENCOs may or may not take part in LFC service in this new setting. In deregulated power networks, the provision of auxiliary services is based on a competitive electricity market [74,75].
2.3. Three Area Power System
LFC modelling for three-area interconnected power systems (TAIPS) are presented in [85,86,87,88,89,90,91,92,93]. An LFC model for a TAIPS is provided in [94], where steam-hydro power units are taken into account in the first and second areas, while a steam power unit is the only source of energy in the third area. In [93,95,96], a thermal power system with three control areas is examined. In three-area interconnected power systems, radial and ring networks among the various control areas are explored in [97].
2.4. Four-Area Power System
To keep the frequency within a permitted range, large power systems are typically separated into various control regions. The LFC issues in four-area interconnected power systems (FAIPS) has been presented in [100,103,106,107,108,109,110]. An LFC for FAIPS with hydro power units as the first effort in this sector is presented in [73]. Furthermore, the frequency response models of FAIPS that are appropriate for LFC are presented in [111].
2.5. Multi-Area Power System
In nature, power systems are linked together. A larger system known as the multiarea system is created by connecting various single areas together. A six area power system consisting diverse power generating sources is presented in [113,114,115,116]. AGC models are provided in [116]. For various restructured power system designs, such as five-area and multi area power systems [75,79,107,117,118].
2.6. Microgrid and Smart Grid
A microgrid (Figure 3) is a tiny power grid that can function on its own or in tandem with other microgrids. Energy generation that is distributed, dispersed, decentralised, or embedded refers to the use of microgrids. LFC models of fuel cell, wind, and solar-powered electric hybrid power systems is presented in [123,124,125,126,127,128,129,130]. Modelling the LFC takes into account a microgrid and hybrid system made up of PV, WTG, micro turbines, fuel cells (FC), capacitive energy storage (CES), and aqua electrolysers (AE). Active power flow and frequency stabilisation is achieved using different optimisation based PID controller [131,132].
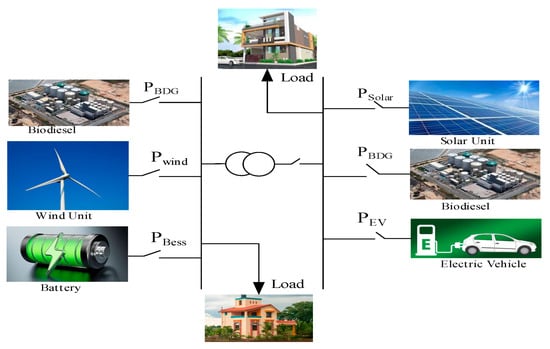
Figure 3. Schematic diagram of microgrid.
3. Soft-Computing-Based Controller for LFC
In order to maintain a steady system frequency, a power generating module has the capacity to modify its active power output in response to a detected system frequency deviation from a setpoint. Furthermore, the LFC is classified as: (i) primary frequency control; (ii) secondary frequency control; and (iii) tertiary control.
- (i)
-
Primary frequency control: Changing a generating unit's power versus frequency in accordance with its static generation characteristic as stablished by the speed governor settings constitutes primary control. Restoring generation and demand balance within the synchronous area at a frequency other than the nominal value is the goal of primary control. This is done at the expense of the rotating masses of the producing units and associated motors' kinetic energy. After the generation and demand balance has been disturbed, the primary control action time is 0 to 30 s.
- (ii)
-
Secondary frequency control: Utilizing a central regulator, secondary control modifies the active power set points of generating sets that are subject to secondary control in order to simultaneously restore the system frequency to its set-point value and power interchanges with neighbouring control areas to their planned values. Secondary control assures that the complete reserve of primary control power activated will be made accessible once again by changing the operating points of individual producing units. A few minutes pass more slowly under secondary management than under primary control. It starts acting roughly 30 s after a disruption or event and finishes within 15 min.
- (iii)
-
Tertiary control: Tertiary controls are any automatic or manual adjustments made to the operating points of the participating generating units in order to replenish a sufficient secondary control reserve or to provide the desired (from an economic perspective) distribution of this reserve among the active generating units. Altering the set operating points of thermal power plant generation sets, around which primary and secondary control acts, connecting or disconnecting pump storage hydro power stations operating in an intervention mode, changing the power interchange programme, and controlling load are all examples of tertiary control.
The LFC’s parameters have been optimised using soft computing approaches in order to obtain good dynamic response. To best tune the gains of the controllers, lots of evolutionary optimisation algorithms have been applied. The classification of the various soft-computing-based controllers is presented in the Figure 4.
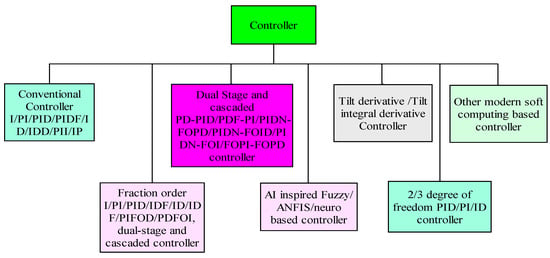
Figure 4. Classification of controller used for LFC in the different power system models.
3.1. Conventional Controller
The conventional control phenomena rely upon the traditional integer order (IO) controllers, which are frequently used to leverage the governor and minimise the ACE/μACE in the power system to improve FR. The conventional controller is designed with various combinations such as Integral (I), Proportional Integral (PI), Proportional Integral Derivative (PID), Proportional Integral Derivative with filter coefficient (PIDN). Several research papers used I/PI/PID controllers in conventional, deregulated, microgrid, and smartgrid environments to deal with LFC issues. A basic integral controller tuned with Bacterial Foraging-Based Optimisation [153], iterative linear matrix inequalities techniques by the mixed H2/H∞ technique based decentralised proportional-integral (PI) controller [154], biogeography-based optimisation (BBO) tuned PID and fuzzy-PID four-area power system [155], conventional PID controller tuned by various optimisation techniques (i.e., hybrid genetic algorithm-simulated annealing (GA-SA), and chaotic optimisation algorithm (COA) and ant colony optimization are proposed in [156,157]; and Hosoke-Jeeve’s optimisation tuned double mode PI controller [158] tuned AGC are examined for regulating the system frequency and tie-line power fluctuations.
3.2. Fractional Order Controller
Researchers have used so many optimisation techniques-based FO controllers to handle LFC problems since they have advantages when compared with the IO-based classical controller. The FOPID controller is an improvement over the conventional PID controller that offers non-integer integro-differential order selection in addition to the traditional PID controller gains. A Lion Algorithm-based FO-based PI controller has been proposed for LFC in dual-area system made up of hydro-thermal-gas power generating units in [171]. Alomoush introduced the use of FOPID controllers in LFC problems in 2010 and established a performance comparison between the use of FOPID controllers and IOPID controllers in dual-area conventional power networks [172]. The parameters of the controller were tuned with the help of MATLAB optimisation toolbox. Furthermore, the LFC of a single-area conventional system with a non-integer BB-BC algorithm-based FOPID controller is presented in article [173].
3.3. Tilt Integral Derivative (TID)/Integral-Tilt Derivative (I-TD) Controller
Tilt integral derivative (TID) as a PID-type feedback control system compensator is offered, replacing the proportional component with a tilting component with a transfer function s−1/n. A better feedback controller is achieved because the whole compensator's transfer function comes closer to an optimal transfer function [183]. An intelligent, efficient, and reliable LFC scheme is necessary in today's complex and integrated power systems using RESs to maintain frequency and tie-line power flow within a tolerable range. A novel LFC approach using a dual-stage controller designed using fractional-order tilted-integral-derivative (TID) and integer-order PD controllers is proposed [30].
3.4. Cascaded and Dual-Stage Controller
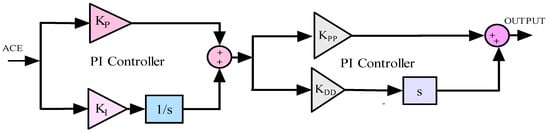
Cascaded controllers were used by numbers of researchers for minimizing the frequency tie line power deviation. In cascade control, there are two controllers, one controller located inside the feedback loop of the other. The output of the first controller serves as the set-point for the second controller. This type of controller handles the distrubances more effectively. This type of controller can respond to disturbances more efficiently. When there are multiple measurements but only one control variable is accessible, cascade control is employed. The basic configuration of cascade PI-PID and PI-PD controller is presented in Figure 8 and Figure 9.
Figure 8. Cascade PI-PID controller.
Figure 9. Cascade PI-PD controller.
3.5. AI Approaches
3.5.1. ANN Approach
An extended control strategy for artificial neural networks (ANNs), centered on the idea of connected information processing phenomena, links the received net input neuron and output neural signal in a non-linear (connected with weighted sum) connection. In order to produce better results in complicated power networks, ANN can be used for linear and non-linear LFC problems. With appropriate controller management, the ANN technique has been used in linear and non-linear power systems to restore the system frequency as proposed in [104,206].
3.5.2. Neuro Fuzzy and Adaptive Neuro Fuzzy Approach
The use of the neuro-fuzzy approach for LFC has been demonstrated by a number of researchers. Studies [212,213], which concentrated on a dual-area LFC analysis under a recurring fuzzy neural network based feed-forward controller, have acknowledged the involvement of neuro-fuzzy networks in LFC issues. Dual-area thermal-hydro plant simulation results plotted under a hybrid neuro-fuzzy controller are proposed in [213].
3.5.3. Fuzzy Approach
Due to its sensible wide operating range and incredibly rapid response time, an efficient fuzzy logic approach for regulating system dynamics has rekindled attention among researchers. For non-linear multi-area power system frequency regulation, Chang et al.’s initial study in [220] monitored the PI controller using fuzzy logic automatic power frequency management (APFM) of linear or non-linear power system. It is discussed in [49,112,117,221] and involves monitoring various traditional as well as non-integer controllers with fuzzy logic assistance. An ideal decentralised Water Cycle Algorithm (WCA)-tuned type-II FLC for frequency stabilisation of conventional electric power systems with GRC and GDB nonlinearities is presented in [222]. A design of the online control of type-II fuzzy technique being used for the LFC of a dual-area restructured power network is illustrated in [223,224].
3.6. Other Modern Controllers
In AGC and microgrid networks, a few recently developed controllers have proven to be reliable for LFC schemes. In order to decrease frequency oscillation in a single-area hybrid power network used sliding mode controllers in [186]. The paper [230] proposed an integral higher degree SMC controller to properly address the LFC problem for the triple-area hydro power plant in order to improve the SMC controller action. For independent renewable microgrid systems, a unique sliding mode consensus controller (SMCC) has been designed [231].
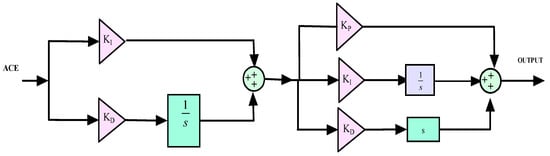
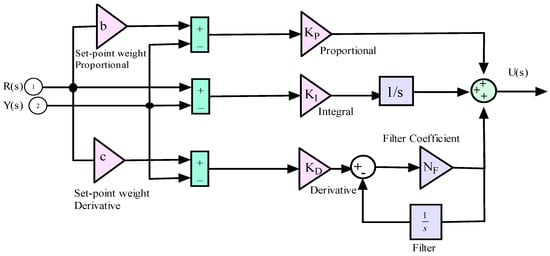
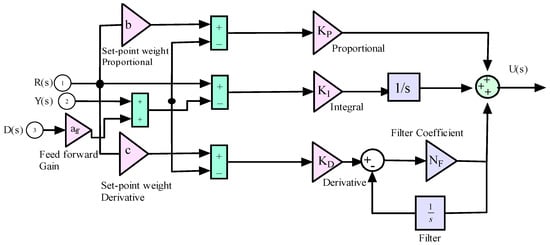
The two-degree-of-freedom (2DOF) and three-degree-of-freedom (3DOF) PID controllers have been used in several studies. The output signal is produced by the DOF-PID controller block based on the difference between a reference signal and a measured system output. According to the given setpoint weights, the block computes a weighted difference signal for each of the proportional, integral, and derivative actions. The sum of the proportional, integral, and derivative actions on the corresponding difference signals—with each action weighted in accordance with the gain parameters—results in the block output. The derivative action is filtered by a first-order pole. Gains on controllers can be adjusted manually or automatically. The Simulink Control DesignTM programme is necessary for automatic tuning. The fundamental diagram of 2DOF-PID and 3 DOF-PID is presented in the Figure 10 and Figure 11. A novel Seagull Optimisation Algorithm (SOA) tuned with three-degrees-of-freedom (3DOF) is suggested for multi-area (thermal, hydro, and nuclear units) power system [233].
Figure 10. Two-degree-of-freedom PID controller.
Figure 11. Three-degree-of-freedom PID controller.
This entry is adapted from the peer-reviewed paper 10.3390/en16041917
This entry is offline, you can click here to edit this entry!