Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Bathymetric LiDAR technology is a technology used for simultaneous data acquisition regarding the morphology of the bottom of water reservoirs and the surrounding coastal zone, realized from the air, e.g., by plane or drone. Contrary to the air topographic LiDAR, which uses an infrared wavelength of 1064 nm, bathymetric LiDAR systems additionally use a green wavelength of 532 nm. The green laser can penetrate the water, which makes it possible to measure the depth of shallow water reservoirs, rivers, and coastal sea waters within three Secchi depths.
- green laser
- LiDAR bathymetry
- coastal zones
1. The Use of a Green Laser in Airborne LiDAR Systems
The green laser can penetrate the water and on this basis, it can provide information about the presence of underwater objects or the bottom topography. The dependence of the penetration of laser rays through water depends on its purity (transparency). This is such a strong and obvious relationship that the penetration depth of a given system is usually given not in the form of the penetration depth expressed in meters of depth, but in the form of a multiple of visibility—the so-called a Secchi disc [1]. The Secchi disc is a device designed by Pietro Angelo Secchi for measuring the transparency of water. The Secchi disc is a white, matte circle-shaped plate with a standardized diameter and white color. It is lowered from a boat in a given water reservoir on a graduated line or a rod with a centimeter scale. The purity of the water is defined by the depth to which the disc is still visible. Penetration of bathymetric systems is in the range of 1–3 depths of the Secchi disc.
The green laser’s ability to penetrate water has been used in LiDAR air bathymetric systems (acronym for “light detection and ranging”).
LiDAR scanners consist of several components. Of course, you need a light source, a laser diode, and its receiver that measures the light reflected from the scanned object. Additionally, they are usually equipped with an optical system that shapes the radiation beam in such a way as to increase the scanning range. LiDAR scanners also include GPS modules that provide location information. In addition, if the measuring device works on board a moving car or aircraft, correction of the results is required, because the calculations must take into account the height at which the vehicle is located and its inclination. Therefore, scanners are equipped with inertial measuring units.
Air LiDARs for topographic mapping usually use YAG diode lasers with a wavelength of 1064 nm, while bathymetric systems (underwater depth research) usually use YAG lasers with a frequency doubling of 532 nm because 532 nm penetrates the water with much less attenuation than 1064 nm.
Some of the existing systems use the unique LiDAR off-camera technology that illuminates objects from multiple angles, minimizing shadowing in the data. LiDAR with off-sky imaging technology is also better for detecting objects on land and in water.
Bathymetric scanners, apart from the fact that they use a green laser, differ from topographic scanners in much greater power, lower frequency of laser pulses, and operation from lower flight altitudes.
The knowledge of the location and orientation of all these elements enables the LiDAR system to record accurate measurements. Some of these sensors can now measure more than 100,000 points per second, resulting in measurements with more than 10 points per m2 in shallow water [2]. In a recent study for Samoa, over 1.8 billion points were captured in an area of just over 1100 km2. The deepest of these measurements reached a depth of just over 75 m.
2. Use of LiDAR Bathymetry
Aerial laser bathymetry (ALB) is an attractive technology for measuring shallow waters due to the speed of data acquisition and high point density achieved. Especially valuable is the possibility of using ALB in non-navigable areas, where an alternative is traditional, ground-based geodetic surveys that require entering the water by surveying (wading with a pole). Compared to underwater acoustic systems, ALB is suitable for large areas, providing dense and accurate data [3].
Most of the scientific literature published so far has focused on the use of ALS in coastal areas [4], while similar studies in river environments are considered less frequently [5][6].
2.1. Application for Measuring River Crosses and Fluvial Processes
Flowing water is one of the basic factors that shape the Earth’s surface. River processes are defined as the physical interaction between flowing water and the natural channel through which it flows. River processes can be divided into [7]:
-
river erosion, i.e., cutting into the Earth’s surface, then distinguish erosion: deep, backward and lateral,
-
transport or transport of rock material downstream of the river,
-
accumulation, that is, the deposition of material carried by the river.
A number of modern measurement techniques are used in the study of river environments. The instruments used allow for quick data acquisition, but measurements taken from the ground surface [8][9][10] are limited to selected areas of smaller rivers. The density of the riverbed points obtained by classical methods is low and heterogeneous compared to the possibilities of the ALS.
Topographic LiDAR can be used to capture the coastal area [11][12][13], but the used IR beam is absorbed by water and does not allow the bottom to be measured. Measurement of the water depth is also possible on the basis of RGB and/or hyperspectral images. It is made on the basis of the correlation between the depth of water and the color of the image [14][15] and is often combined with LiDAR and/or ground data [16][17][18][19].
Most of the studies mentioned on the evaluation of the deposited sediments and the size of erosion are performed using the DEM of differences (DoD) models [20] as:
where zDoD is a single DoD cell deposition/ erosion value and znew, zold corresponds to the height of the DTM cells at the epochs studied.
Based on the estimation of the DTM errors that propagate in the DoD, it can be assessed whether the difference is a measurement noise or represents a real change:
where σDTM, new, σDTM, old represent the spatial accuracy of the DTM.
Aerial LiDAR bathymetry (ALB) has evolved rapidly in recent years and now enables high resolution (>20 dots/m2) and height accuracy (<10 cm) mapping of river topography for both water and coastal areas [21].
The spatial resolution of the ALS data is suitable for the visual recognition of macroscale forms of river land such as river channels, palaeochannels, alluvial fans, levees, and valley edges [13][22][23][24]. One-dimensional river basin profiles can be used to distinguish the morphological units of the riverbed [25]. A distinct advantage of LiDAR data is that it allows for faster, more accurate, and detailed mapping of river landforms compared to lower resolution elevation data obtained from surveys. off-road.
The vertical error and spatial resolution of the data define the minimum size of the form that can be identified [13]. The paper [21] proposed a method for determining air/water-interface when the echo density of signals reflected from the water surface is low (the echo coverage of the water surface was only 25%, counting cells of 1 m2 with at least a single surface echo as important). The method is based on generating a model of the riverbed from rarely captured cross-sections.
The input in this method is the 3D LiDAR point cloud and the 2D river axis. On their basis, transverse sections perpendicular to the river axis are generated. Assuming a constant water level in a given cross-section, the observer, in a manual way, in the graphical editor defines the height of the water level in each subsequent cross-section. In the next step, the height of the water table is extrapolated in subsequent sections and subsequent sections are shown on the terrain plan and longitudinal section (Figure 1)
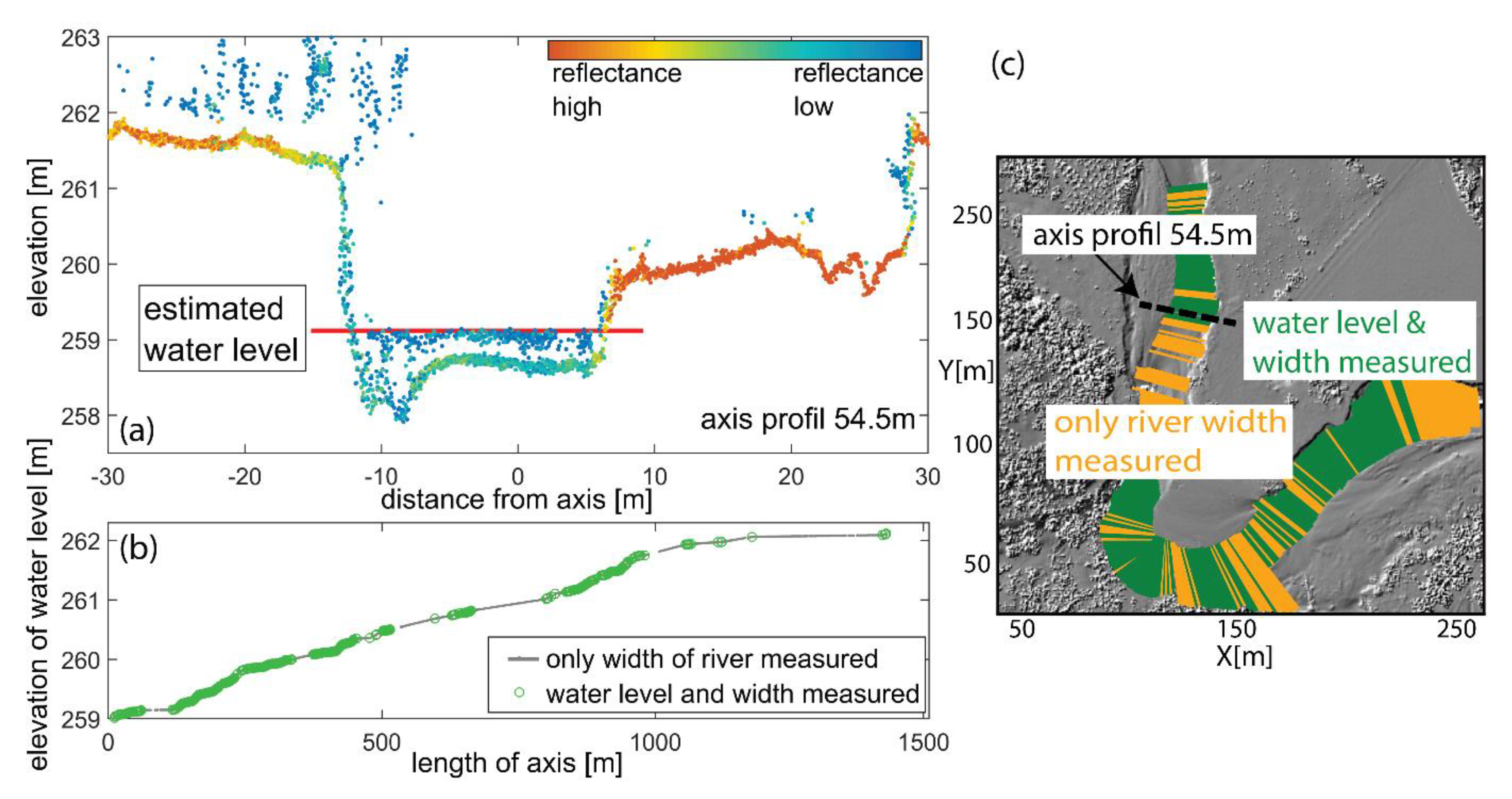
Figure 1. Semi-automatic derivation of water surface model; (a) cross section with LiDAR echoes colored by reflectance and manually defined water level and extent (red line); (b) longitudinal section with measured water levels (green circles) and/or extents (gray dots); (c) plan view, measured sections marked in green/orange [21].
Sedimentation processes caused by the transported material influence channel forming flows (Figure 2) [26]. On the other hand, serially repeated topographic measurements allow for research on changes taking place after periods of high water levels [8].
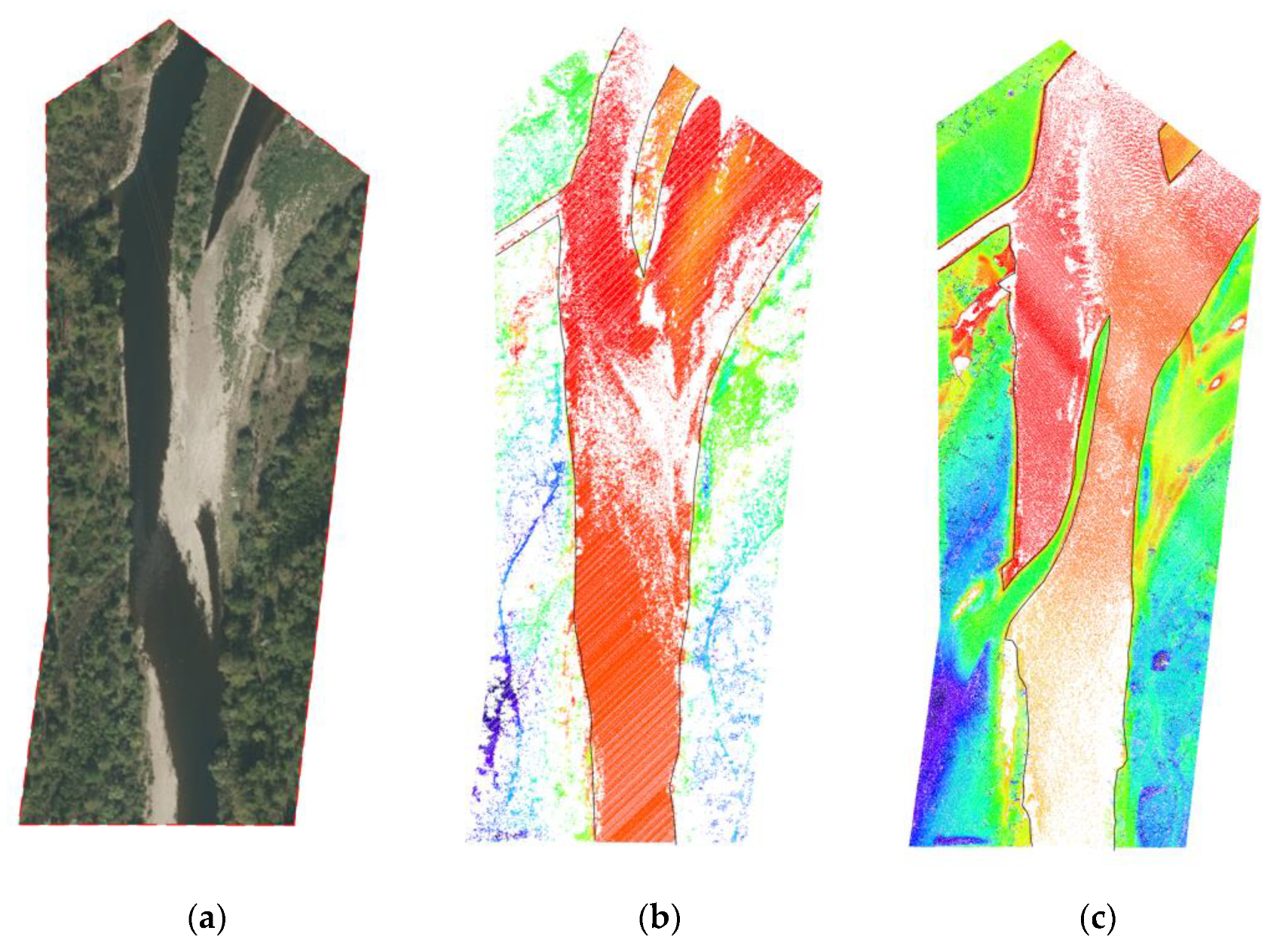
Figure 2. Change of the river bed in the period 2012–2020 (Soła River, Poland) (a) orthophoto, (b) LiDAR 2020, (c) LiDAR 2012.
For the needs of the national authorities, assuming different variant data, hydraulic models are made, using computer simulation to assess the risk of flooding. Planning work carried out in this way is based on the scientific, evidence-based basis of the flood risk assessment that is required as part of the planning process. Hydraulic models use long-term statistics on precipitation, sea levels and river flows, along with detailed simulations of how water in the landscape is moving. These activities are aimed at determining the likelihood of a flood occurring in an independent and man-dependent manner (e.g., by the proposed investments).
As a consequence of the high resolution of LiDAR data, it is possible to use them to improve the performance of the 1D [27][28] and 2D hydraulic models [29][30], as well as to circle the height of the water table [21].
For one-dimensional (1D) hydraulic surface water models, single water surface ordinates are computed at each section where the flow is shown only perpendicular to the section and must be drawn by the model builder. In a 2D model, the digital elevation model (DEM) serves as the basis for calculations to determine the depth, velocity, and direction of surface waters.
With one-dimensional (1D) surface water hydraulic models, single water surface elevations are computed at each cross-section where the flow is only shown perpendicular to the cross-section and needs to be drawn by the model builder. In a 2D model, a digital elevation model (DEM) is used as the basis for computations to determine surface water depths, velocities, and directions (Figure 3).
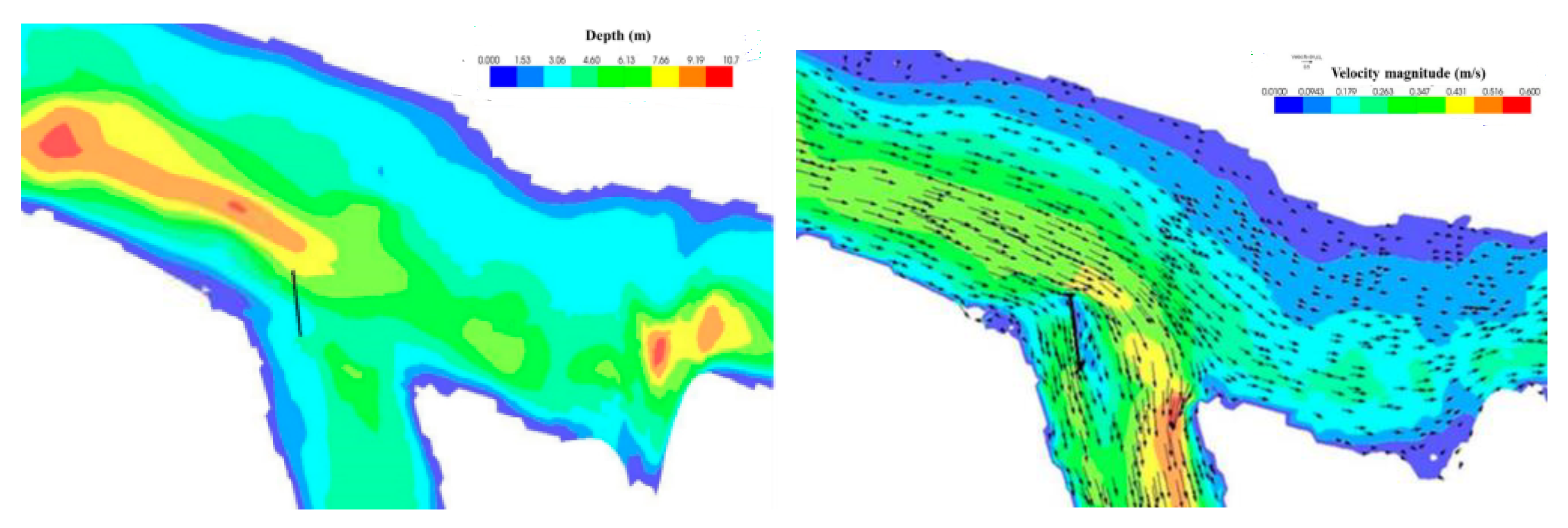
Figure 3. Simulated flow depth and velocity distribution with its vectors (modified after [31]).
Article [32] presents a new Matlab script for determining the morphometric characteristics of rivers, canals and canyons. On the basis of the trough edges, previously defined by the user, the script determines the center line and other morphometric features, such as the edge width (B), the radius of the centerline of curvature (R), and waviness (SI) and determines the orientation of the sections, the location of the vertices of bends and intersections. The script is also resistant to very sharp turns and irregular troughs with sudden changes in curvature. If bathymetric or digital elevation topographic data (derived from Bathymetric LiDAR) is available, the script provides additional morphometric features, such as thalweg, slope (S), slope depth (HB), section area (A), channel aspect ratio (B/HB), and shaft inclination (α) (Figure 4).
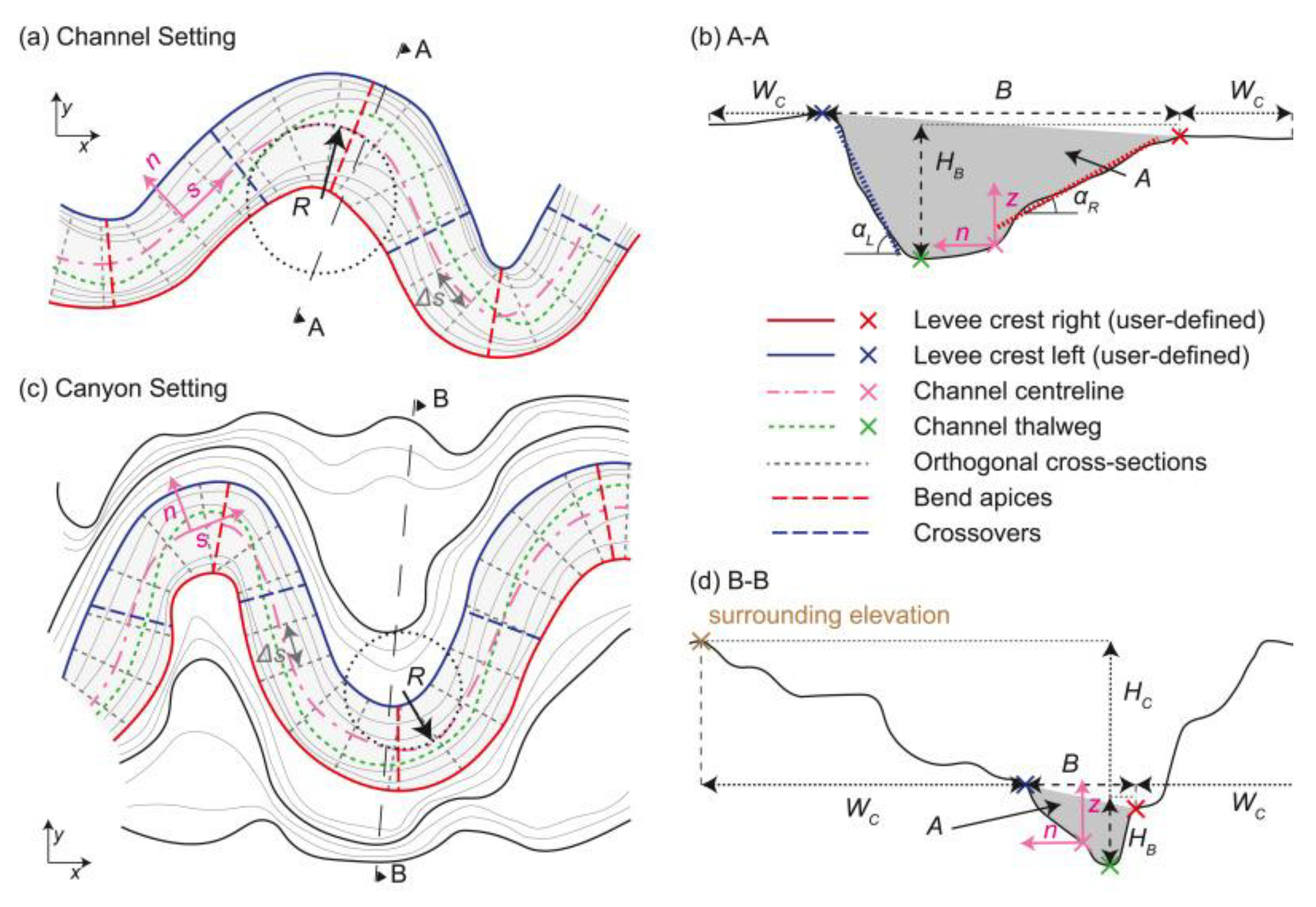
Figure 4. Determination of morphometric parameters of the river bed [32]. User-defined levee or bank crests (right in red, left in blue) for bankfull active channel in a channel (a,b) and canyon setting (c,d) and user-defined corridor width (WC) outside bankfull active channel.
Steep riverbanks can be difficult to measure altitude with ALS. This was demonstrated in the work of Hodgson and Bresnahan [33]. This is in line with the finding of Hyypp et al. [34], who observed that the DTM altitude error determined from the LiDAR observation significantly increased on slopes covered with trees with a slope greater than 15 degrees. Another problem may be the fact that the point density obtained from ALS may be too sparse, resulting in riverbanks not being accurately described in the terrain model.
2.2. Application to Measurement of Shallow Offshore Sea Zones and Abrasion
As sea levels rise and the severity of extreme natural phenomena increases, the need to deepen the knowledge of the coastal zone becomes more and more evident. The basis for understanding the risk in areas exposed to the negative effects of sea waters is the determination of the course of the coastline and the land and sea coastal surface features.
The intensity of the sculpting activity of the sea depends on the type of rocks that make up the shore, the local relief, sea tides and the location of the body of water. The abrasion consisting in the gradual eroding of the seashore especially concerns the cliffs. Directly below the eroded high coast, an abrasive niche is created, and the eroded, fragmented material is transported and accumulated.
Accumulation occurs most often on the low coast, where the accumulation exceeds erosion and gives rise to forms such as beach, shoreline, storm embankment, revue, lido, lagoon, etc. Bathymetric LiDAR is the most effective and cost-effective technology that allows simultaneous recording of land and sea bottom for obtaining a continuous, detailed 3D elevation model along the coastline [35]. Its ability to successfully capture heights on both sides of the coastline, in areas extending more than 100 km along the coast, made the bathymetric LiDAR the “gold standard” for coastal sensitivity and coastal benthic habitat modeling.
Bathymetric LiDAR can be successfully used to create high-resolution bathymetric maps, which represent the basic data set for understanding the impacts and threats of climate change, erosion trends, and sea level rise [36][37][38][39].
In addition, the time series of ALB datasets can successfully support accurate change detection analysis in this difficult environment [40].
The use of LiDAR airborne bathymetry (ALB) has become a common technology for mapping shallow areas in high resolution [41]. Compared to underwater acoustic systems, ALB is suitable for large areas, providing dense and accurate data (Figure 5).
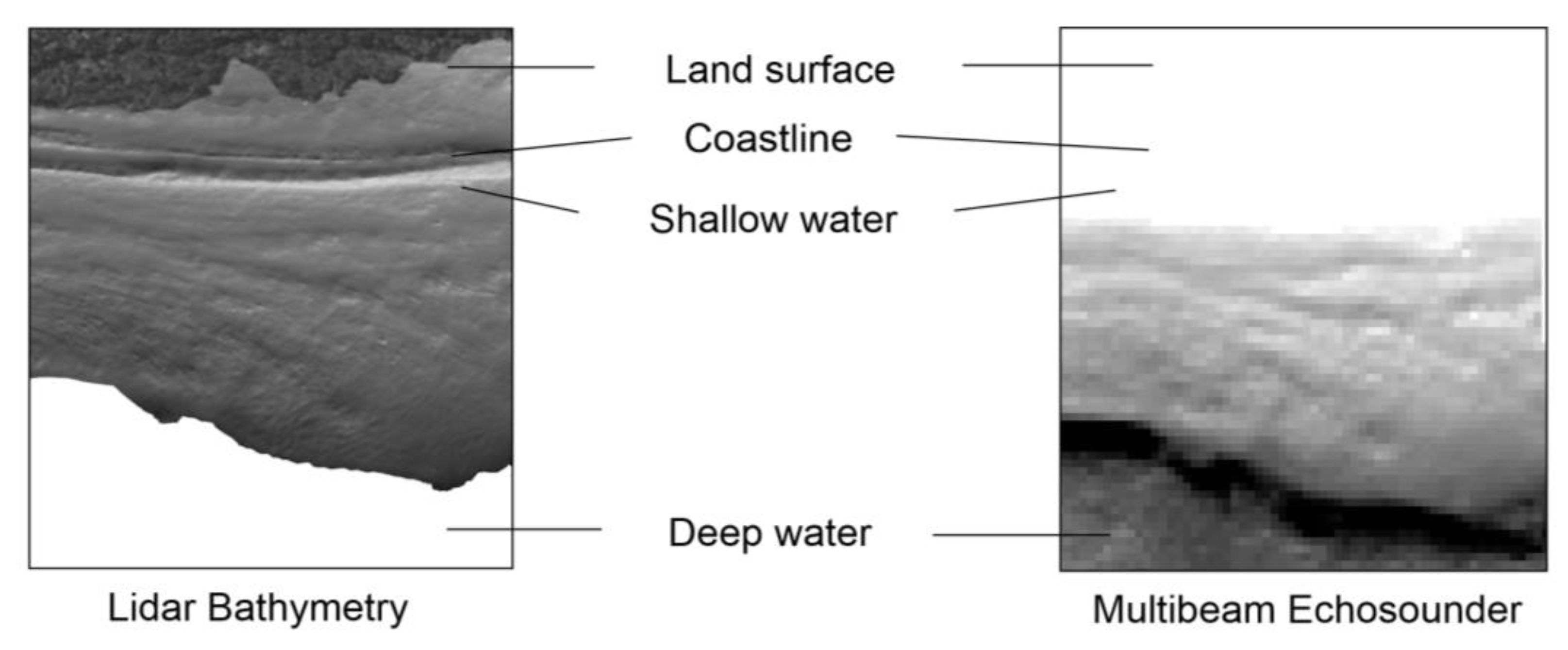
Figure 5. Comparison between bathymetric LiDAR and multibeam echosounders (Dobczyce reservoir, Poland).
Another problem that is important in coastal protection and management is the definition of the coastline. Data from measurements at a depth of 0–2 m are usually incomplete or not available at all due to the difficulty of reaching such shallow waters [42]. LiDAR Bathymetry (ALB) is an active remote sensing instrument used to obtain the topography of such shallow coastal waters [43]. It can efficiently deliver high accuracy and density bathymetric data sets in non-navigation and complex topographic areas [44].
Due to its excellent spatial positioning performance, ALB is widely used for the seamless topobatimetric mapping of shallow water areas, such as reefs near islands [45] (Figure 6).
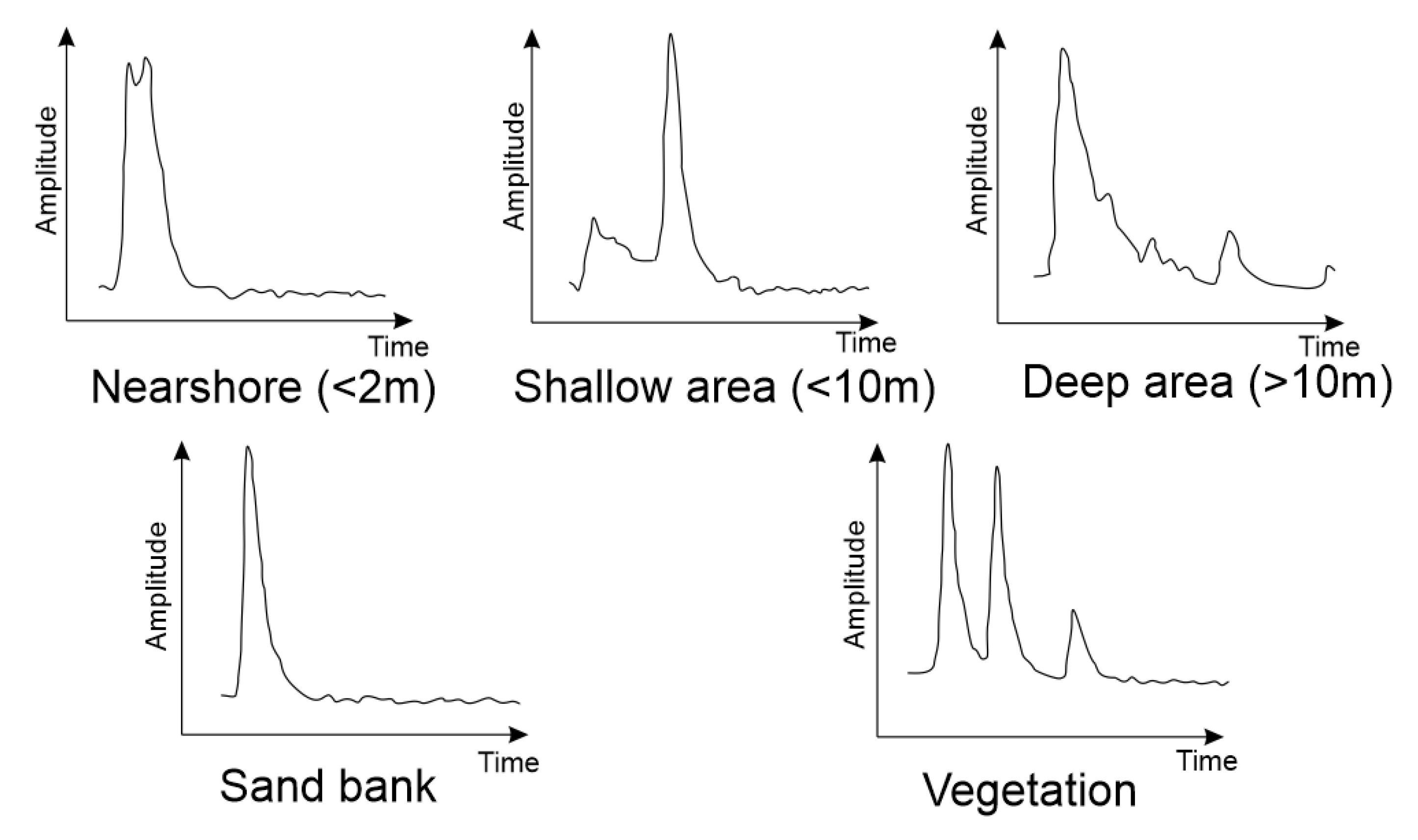
Figure 6. Echo responses for bottom topography elements (based on [46]).
ALS data can record the relief of the seabed and adjacent land surface. The numerical terrain model created on their basis allows for a precise determination of the state of the coastal zone at the time of registration. The performed cyclical measurements allow for the monitoring of the coastal zone, identification of trends in changes in the shape of the coastline, designation of relatively safe places, not endangered by erosion and flooding, and particularly endangered places. In the field of underwater measurements, attention should be paid to such possibilities of LiDAR bathymetry, such as identification of types of substrate forms and anthropogenic structures, automatic mapping of seabed geomorphology [47], identification of erosion and deposition patterns along coast [48], assessment of the rate of accumulation of post-flotation sediments at the bottom of the reservoir [49], and underwater landslide research [50].
The airborne LiDAR (ALB) bathymetric system is widely used in describing the topographic features of the seabed, building 3D models of the seabed, monitoring coral reefs, and underwater archeology.
With regard to the classification of the seabed relief, the bathymetric LiDAR has not been widely used so far. Applications potentially available in the literature include shallow coastal area monitoring [51][52], monitoring the status of navigation and protection channels of the structure [53], classification of the tidal environment [54], benthic habitat mapping [55], as well as the organization and placement of archaeological sites in shallow waters [56].
Moreover, from ALB, sedimentological (density, concentration) and hydrodynamic (suspended sediment concentration, turbulence) information can be obtained on the basis of the analysis of laser return intensity curves [57].
In the study [47] concerning the Polish coast of the southern Baltic Sea, exposed to increased coastal erosion, the recognition and classification of geomorphological forms occurring in the ring in both natural and anthropogenic sections of the coastal zone was made (Figure 7). Machine learning classification results were compared with the manual characteristics of seabed forms and coastal protection structures, and machine learning classification procedures for ALB were assessed.
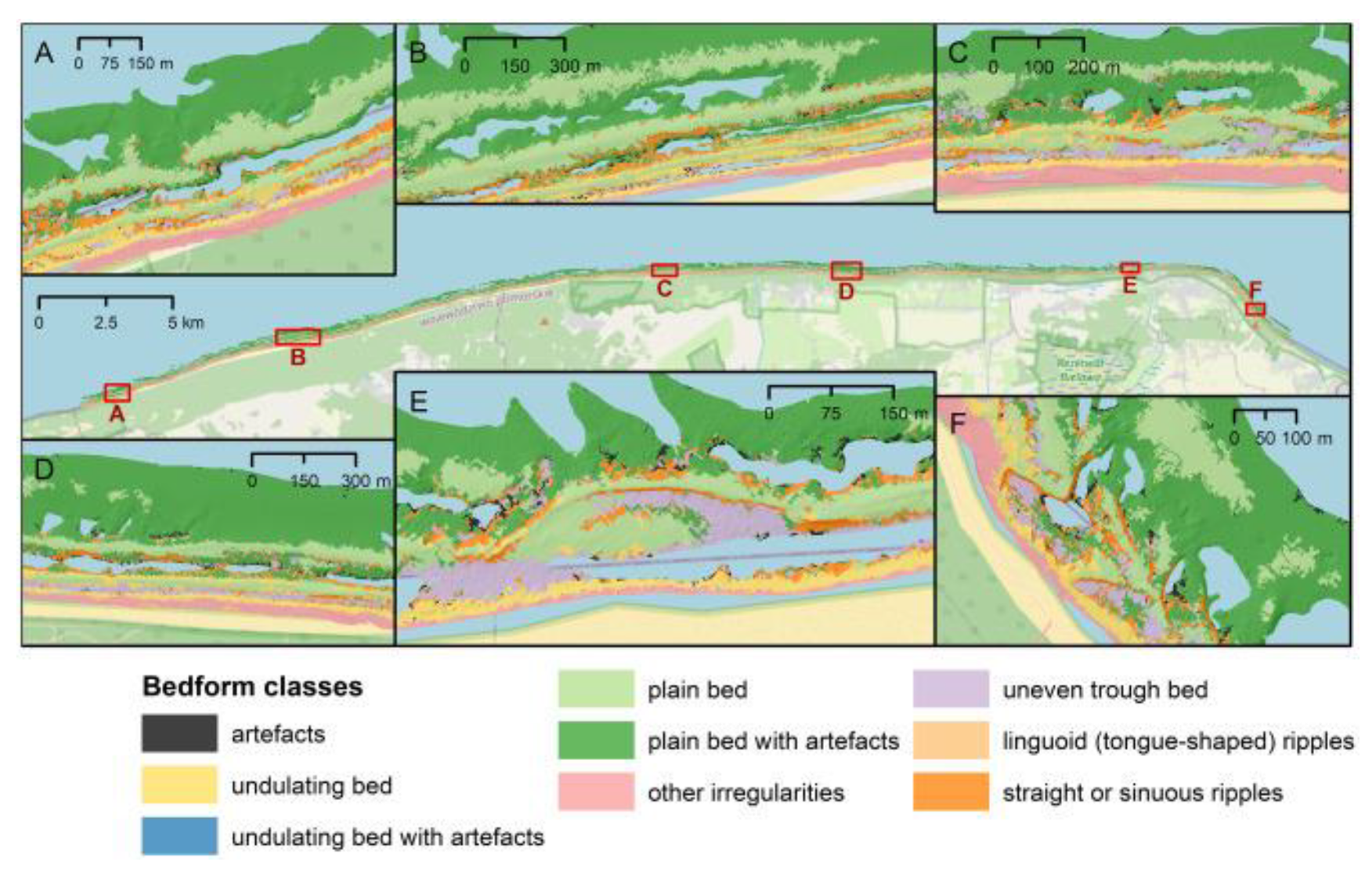
Figure 7. Classes of geomorphological bedforms automatically mapped using ALB and machine learning supervised, (A–F) subsets of the study site marked on the general map [47].
Identification and classification of seabed geomorphology based on remote sensing data (ALB) can be done manually (preferably by one interpreter [58] or by automatic or semi-automatic. Seabed classification methods include unsupervised or supervised approaches. In the first approach, seabed classification is based on properties and relationships, e.g., under Jenks’ unsupervised classification [59]. The second approach involves training with an input data set that can be defined manually or in the field [60]. Both techniques can be applied by performing image pixel analysis or based on image analysis based on geographic features. The latter method has been used in seabed research for over 20 years [61].
Testing the waters with green LiDAR light allows for precise mapping of the bottom of the reservoir in terms of the presence of undesirable objects (explosives, wrecks, garbage, etc.). The possibility of searching for crude oil and natural gas deposits using the DIAL technique is also noteworthy.
The results of research conducted on the basis of ALS data can be used:
-
by the state administration responsible for the safety of the seashore in order to select appropriate methods of its protection against erosion;
-
with safe planning of investments in the coastal zone and preparation of sea space development plans;
-
by local self-government authorities when verifying spatial development plans of seaside towns and making prudent decisions as part of integrated coastal zone management.
3. Directions of Bathymetric LiDAR Development
LiDAR is a tool for civil (commercial), administrative, and military use. There is a growing number of industries in virtually every branch of the economy and research activity. The LiDAR technique can be used to create digital three-dimensional representations of areas on the Earth’s surface and the bottom of water bodies by terrestrial, satellite, aerial and mobile techniques. It is widely used to create high-resolution maps and is used in surveying, geomatics, archeology, geography, geology, geomorphology, seismology, forestry, atmospheric physics, laser guidance, aeronautical laser mapping (ALSM), and laser altimetry. LiDAR is currently the most detailed and accurate method for creating digital terrain models.
ALB aerial bathymetric scanning is a promising technique for measuring the bottom of water reservoirs. This technique has developed a lot in recent years due to the capabilities of the scanner as well as the capabilities of post-processing software. Bathymetric LiDAR is a technology for acquiring data from the air. Unlike the topographic LiDAR in air, which uses 1064 nm infrared, bathymetric LiDAR systems use a 532 nm wavelength to penetrate the water column to measure the bottom of a body of water.
Bathymetric LiDAR is currently the most effective and cost-effective technology to simultaneously record both the terrain surface and the bottom of water bodies to obtain a continuous, detailed 3D model of the measured terrain.
When selecting and using a LiDAR bathymetric sensor, environmental factors and individual features of the system should be taken into account. Even then, the operator’s knowledge and experience often determine the success of a measurement. In addition, the decision to select the best test system for testing will depend on the test area, environment, design requirements, and sensor availability. The considerations that typically determine sensor selection are maximum depth, point density, coverage, end product requirements, and, not least, the intended purpose of the data.
Recent advances in LiDAR bathymetric sensors are going in many different directions. Some of these achievements include efficiency gains by increasing point density and penetration depth while maintaining equal accuracy over clear and cloudy water [62], and fast and automatic work with LiDAR data allowing for automatic calibration, registration and refraction correction, full wave processing, quality control, and data export. A solution to the problem of distinguishing signals reflected from the water surface and the bottom under shallow water conditions (less than 2 m) is also being developed [63]. Moreover, this is only the beginning of the use of LiDAR bathymetric sensors in small unmanned aerial vehicles (UAVs), although this is likely to change over the next decade. Cloud computing and big data processing are also very promising, and it will be fascinating to see how the industry takes advantage of these advances to provide additional end-user opportunities.
The LiDAR technique has many significant advantages that distinguish it from other measurement techniques.
The laser scanner is independent of lighting conditions (it is an active system). Nighttime imaging is even more advantageous due to less air turbulence.
Imaging with this technique is possible even when it is completely cloudy (only conditions limiting the penetration of the laser beam, e.g., heavy rain and fog, represent an obstacle). Spatial data are recorded directly, with a very high accuracy that characterizes elevation data. It is possible to register many reflections (signal echoes), and the cycle of data processing and production of final products is short.
Limitations of LiDAR include lower accuracy relative to altitude accuracy, large volume of data, and relatively high cost of data acquisition and processing.
As LIDAR systems evolve, it becomes more and more useful in many applications. In the future, the entire world will basically depend on various LIDAR systems to detect, collect and update data. So far, the greatest progress has been made in obtaining high-accuracy data by developing their correction and calibration. Research will continue to be undertaken to assess the impact of the laser wavelength on the accuracy of the measurement process (the reflection coefficient can only occur at a certain wavelength). Another direction of the conducted research is to draw attention to the scanning method that can be applied using various mechanisms.
The proliferation of unmanned aerial vehicles (UAVs) will force the use of light and small LiDAR sensors, so work will continue on their continuous miniaturization while maintaining the measurement accuracy parameters. Work will be continued on increasing the density of measurement points in the aquatic environment for better detection of details, objects, and identification of the water table.
The automation of data processing processes will constantly progress to increase efficiency and deliver results faster.
Certainly, in some areas, the collected data will be made available on online platforms, which will force improvements to cloud services.
If we care about a high-quality digital surface model (DSM), a point cloud consisting of points that are the first reflection requires manual editing. Fully automatic filtration methods for this type of points for DSM construction are still under development.
The development of laser scanning systems is aimed at increasing their efficiency and increasing the number of registered reflections (echoes) of a single laser pulse. The increase in efficiency is achieved by increasing the frequency of generating laser pulses. In the field of data processing, the methods of aligning blocks of airborne scanning series as well as methods of point cloud classification and filtration are being improved. Given the huge datasets, automatic methods apply here.
The use of data from airborne bathymetric scanning allows the detection of objects located on the seabed. However, post-processing related to point cloud classification is required beforehand, which leads to the separation of classes that guarantee the correct identification of objects, which affects security and indirectly protects the natural environment. Unfortunately, the transparency of water and the density of the point cloud significantly affect the size and efficiency of detecting objects lying on the seabed. Acquisition of data by aerial bathymetry is cheaper and faster. Therefore, it seems reasonable to search for methods of automatic detection of underwater objects, which will be a further stage of research and will be based on the use of full waveform parameters of aerial bathymetric scanning and neural networks.
One of the directions of ALB development is the use of machine learning methods. The authors examine the possibilities of using many algorithms from the machine learning family, such as random forest (RF), support vector machine (SVM), or deep learning, etc. One of the directions of using machine learning methods in the analysis of scanning data is noise removal. Hu et al. [64] proposes a method based on convolutional autoencoding neural networks (CAENN) for denoising the ALS return signal. According to the authors, this algorithm has a strong adaptive ability, and its excellent denoising effect in relation to the methods used so far, although it has not yet been studied well. Machine learning methods in ALB are further developed in point classification. Kogut and Weistock [65] compare support vector machines (SVM) with the random forest (RF) algorithm for classifying water table and bottom points. Very high classification accuracy of both methods applies to points of the water surface and seabed reaching 100%, although for the remaining objects it was only 60%. Similar values were recorded by Kogut and Slowik [66] who used multilayer perception (MLP) artificial neural networks (ANN) and comparatively SVM, random forest, and RUSBusted trees to classify sea surface and seabed points and to detect the location of artificial objects on the seabed.
Due to the fact that the original lidar echo carries a lot of information, the use of machine learning may, compared to traditional methods of classification, offer greater possibilities, e.g., for mapping the formations that build the bottom or aquatic vegetation habitats.
This type of research on aquatic plant habitats is presented by [67][68] in which machine learning techniques are used (Random Forest). The authors use single wavelength or bispectral barymetric lidar. The results obtained have a classification accuracy of up to 85%, which, as the authors themselves indicate, can be improved by using various methods of filtering points with a low prediction confidence. Similar studies on the use of supervised classifiers in mapping seabed morphology are presented by Janowski et al. [47].
Deep learnin-based classification of scanning data is one of the main fields currently being developed in photogrammetry and remote sensing [69][70]. This type of research is also conducted in lidar bathymetry. Shanjiang et al. [71] used the original bispectral bathymetric echo to classify points (sea-land). For this purpose, a multi-layer fully connected neural network and a one-dimensional convolutional neural network (1D CNN) were utilized. They obtained classification accuracy of up to 99.6%, although these are the best quoted data out of 200 attempts. A key factor in obtaining high-quality results is the appropriate number of network training epochs. Mismatch of the training series may result in under- or over-fitting of the network. In the works [72][73] summarizing the current applications of deep learning in laser scanning, further dynamic development of these techniques in the classification and detection of objects is predicted.
This entry is adapted from the peer-reviewed paper 10.3390/s23010292
References
- Idris, M.S.; Siang, H.L.; Amin, R.M.; Sidik, M.J. Two-decade dynamics of MODIS-derived Secchi depth in Peninsula Malaysia waters. J. Mar. Syst. 2022, 236, 103799.
- Mandlburger, G.; Pfennigbauer, M.; Steinbacher, F.; Pfeifer, N. Airborne hydrographic LiDAR mapping—Potential of a new technique for capturing shallow water bodies. In Proceedings of the 19th International Congress on Modelling and Simulation, Perth, Australia, 12–16 December 2011.
- Schmidt, A.; Rottensteiner, F.; Soergel, U. Classification of airborne laser scanning data in wadden sea areas using conditional random fields. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXIX-B3, 161–166.
- Tysiąc, P. Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sens. 2020, 12, 3740.
- Bailly, J.S.; le Coarer, Y.; Languille, P.; Stigermark, C.J.; Allouis, T. Geostatistical estimations of bathymetric LiDAR errors on rivers. Earth Surf. Process. Landf. 2010, 35, 640–650.
- Feurer, D.; Bailly, J.S.; Puech, C.; le Coarer, Y.; Viau, A.A. Very-high-resolution mapping of river-immersed topography by remote sensing. Prog. Phys. Geogr. 2008, 32, 403–419.
- Gręplowska, Z.; Korpak, J.; Lenar-Matyas, A. Fundamentals of River Geomorphology and Morphodynamics; PK Publishing House: Cracow, Poland, 2022; 153p.
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Merz, J.; Pasternack, G.B.; Sear, D.; Vericat, D. Linking geomorphic changes to salmonid habitat at a scale relevant to fish. River Res. Appl. 2010, 26, 469–486.
- Brasington, J.; Rumsby, B.T.; McVey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. 2000, 25, 973–990.
- Merz, J.E.; Pasternack, G.B.; Wheaton, J.M. Sediment budget for salmonid spawning habitat rehabilitation in a regulated river. Geomorphology 2006, 76, 207–228.
- Heritage, G.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surf. Process. Landf. 2007, 32, 66–74.
- Hodge, R.; Brasington, J.; Richards, K. Analysing laser-scanned digital terrain models of gravel bed surfaces: Linking morphology to sediment transport processes and hydraulics. Sedimentology 2009, 56, 2024–2043.
- Notebaert, B.; Verstraeten, G.; Govers, G.; Poesen, J. Qualitative and quantitative applications of LiDAR imagery in fluvial geomorphology. Earth Surf. Process. Landf. 2009, 34, 217–231.
- Marcus, W.A.; Fonstad, M.A. Optical remote mapping of rivers at sub-meter resolutions and watershed extents. Earth Surf. Process. Landf. 2008, 33, 4–24.
- Legleiter, C.J.; Roberts, D.A.; Lawrence, R.L. Spectrally based remote sensing of river bathymetry. Earth Surf. Process. Landf. 2009, 34, 1039–1059.
- Legleiter, C.J. Remote measurement of river morphology via fusion of LiDAR topography and spectrally based bathymetry. Earth Surf. Process. Landf. 2012, 37, 499–518.
- Williams, R.D.; Brasington, J.; Vericat, D.; Hicks, D.M. Hyperscale terrain modelling of braided rivers: Fusing mobile terrestrial laser scanning and optical bathymetric mapping. Earth Surf. Process. Landf. 2014, 39, 167–183.
- Moretto, J.; Rigon, E.; Mao, L.; Delai, F.; Picco, L.; Lenzi, M. Short-term geomorphic analysis in a disturbed fluvial environment by fusion of LiDAR, colour bathymetry and dGPS surveys. Catena 2014, 122, 180–195.
- Delai, F.; Moretto, J.; Picco, L.; Rigon, E.; Ravazzolo, D.; Lenzi, M. Analysis of morphological processes in a disturbed gravel-bed river (Piave River): Integration of LiDAR data and colour bathymetry. J. Civil Eng. Archit. 2014, 8, 639–648.
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156.
- Mandlburger, G.; Hauer, C.; Wieser, M.; Pfeifer, N. Topo-Bathymetric LiDAR for Monitoring River Morphodynamics and Instream Habitats—A Case Study at the Pielach River. Remote Sens. 2015, 7, 6160–6195.
- Aggett, G.R.; Wilson, J.P. Creating and Computing a High-Resolution DTM with a 1-D Hydraulic Model in GIS for Scenario-Based Assessment of Avulsion Hazard in Grave-Bed River. Geomorphology 2009, 113, 21–34.
- Frankel, K.L.; Dolan, J.F. Characterizing Arid Region Alluvial Fan Surface Roughness with Airborne Laser Swath Mapping Digital Topographic Data. J. Geophys. Res. 2007, 112, F02025.
- Jones, A.; Brewer, P.A.; Johnstone, E.; Macklin, M.G. High-resolution interpretative geomorphological mapping of river valley environments using airborne LiDAR data. Earth Surf. Process. Landf. 2007, 32, 1574–1592.
- Cavalli, M.; Tarolli, P.; Marchi, L.; Fontana, G.D. The effectiveness of airborne LiDAR data in the recognition of channel-bed morphology. Catena 2008, 73, 249–260.
- Wu, W.; Rodi, W.; Wenka, T. 3D numerical modeling of flow and sediment transport in open channels. J. Hydraul. Eng. 2000, 126, 4–15.
- Gueudet, P.; Wells, G.; Maidment, D.R.; Neuenschwander, A. Influence of the postspacing density of the LiDAR-derived DEM on flood modeling. In Proceedings of the Geographic Information Systems and Water Resources III—AWRA Spring Specialty Conference, Nashville, TN, USA, 17–19 May 2004.
- Omer, C.R.; Nelson, J.; Zundel, A.K. Impact of varied data resolution on hydraulic modeling and flood-plain delineation. J. Am. Water Resour. Assoc. 2003, 39, 467–475.
- Bates, P.D.; Marks, K.J.; Horritt, M.S. Optimal use of high resolution topographic data in flood inundation models. Hydrol. Process. 2003, 17, 537–557.
- Marks, K.; Bates, P. Integration of high-resolution topographic data with floodplain flow models. Hydrol. Process. 2000, 14, 2109–2122.
- Ali, H.L.; Yusuf, B.; Mohammed, T.A.; Shimizu, Y.; Ab Razak, M.S.; Rehan, B.M. Enhancing the Flow Characteristics in a Branching Channel Based on a Two-Dimensional Depth-Averaged Flow Model. Water 2019, 11, 1863.
- Hasenhündl, M.; Blanckaert, K. A Matlab script for the morphometric analysis of subaerial, subaquatic and extra-terrestrial rivers, channels and canyons. Comput. Geosci. 2022, 162, 105080.
- Hodgson, E.; Bresnahan, P. Accuracy of airborne LiDAR-derived elevation: Empirical assessment and errorbudget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339.
- Hyyppa, H.; Yu, X.; Hyyppa, J.; Kaartinen, H.; Honkavaara, E.; Ronnholm, P. Factors affecting the qualityof DTM generation in forested areas. In Proceedings of the ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2005.
- Coveney, S.; Monteys, X. Integration Potential of INFOMAR Airborne LiDAR Bathymetry with External Onshore LiDAR Data Sets. J. Coast. Res. 2011, 10062, 19–29.
- Culver, M.; Schubel, J.; Davidson, M.; Haines, J. Building a sustainable community of coastal leaders to deal with sea level rise and inundation. Shifting Shorelines: Adapting to the Future. In Proceedings of the 22nd International Conference of the Coastal Society, Wilmington, NC, USA, 13–16 June 2010.
- Lin, N.; Emanuel, K.; Oppenheimer, M.; Vanmarcke, E. Physically based assessment of hurricane surge threat under climate change. Nat. Clim. Change 2012, 2, 462–467.
- Spalding, M.D.; Ruffo, S.; Lacambra, C.; Meliane, I.; Hale, L.Z.; Shepard, C.C.; Beck, M.W. The role of ecosystems in coastal protection: Adapting to climate change and coastal hazards. Ocean. Coast. Manag. 2014, 90, 50–57.
- Kendall, M.S.; Buja, K.; Menza, C.; Battista, T. Where, what, when, and why is bottom mapping needed? An on-line application to set priorities using Expert Opinion. Geosciences 2018, 8, 379.
- Robertson, Q.; Dunkin, L.; Dong, Z.; Wozencraft, J.; Zhang, K. Florida and US East Coast Beach Change Metrics Derived from LiDAR Data Utilizing ArcGIS Python Based Tools. In Beach Management Tools-Concepts, Methodologies and Case Studies; Botero, C., Cervantes, O., Finkl, C., Eds.; Coastal Research Library; Springer: Cham, Switzerland, 2018; Volume 24.
- Wehr, A.; Lohr, U. Airborne Laser Scanning—An Introduction and Overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82.
- llouis, T.; Bailly, J.S.; Pastol, Y.; le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landf. 2010, 35, 640–650.
- Yang, A.; Wu, Z.; Yang, F.; Su, D.; Ma, Y.; Zhao, D.; Qi, C. Filtering of airborne LiDAR bathymetry based on bidirectional cloth simulation. ISPRS J. Photogramm. Remote Sens. 2020, 163, 49–61.
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sens. 2017, 9, 710.
- Pe’eri, S.; Philpot, W. Increasing the Existence of Very Shallow-Water LiDAR Measurements Using the Red-Channel Waveforms. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1217–1223.
- Guo, K.; Li, Q.; Wang, C.; Mao, Q.; Liu, Y.; Zhu, J.; Wu, A. Development of a single-wavelength airborne bathymetric LiDAR: System design and data processing. ISPRS J. Photogramm. Remote Sens. 2022, 185, 62–84.
- Janowski, L.; Wroblewski, R.; Rucinska, M.; Kubowicz-Grajewska, A.; Tysiac, P. Automatic classification and mapping of the seabed using airborne LiDAR bathymetry. Eng. Geol. 2022, 301, 106615.
- Beck, I.J.; Losada, P.; Menéndez, B.G.; Reguero, P.; Díaz-Simal, F. Fernández The global flood protection savings provided by coral reefs. Nat. Commun. 2018, 9, 2186.
- Turmel, D.; Parker, G.; Locat, J. Evolution of an anthropic source-to-sink system: Wabush Lake. Earth-Sci. Rev. 2015, 151, 227–243.
- Hui, G.; Li, S.; Guo, L.; Wang, P.; Liu, B.; Wang, G.; Li, X.; Somerville, I. A review of geohazards on the northern continental margin of the South China Sea. Earth-Sci. Rev. 2020, 220, 103733.
- Cottin, A.G.; Forbes, D.L.; Long, B.F. Shallow seabed mapping and classification using waveform analysis and bathymetry from SHOALS LiDAR data. Can. J. Remote Sens. 2014, 35, 422–434.
- Xhardé, R.; Long, B.F.; Forbes, D.L. Short-Term Beach and Shoreface Evolution on a Cuspate Foreland Observed with Airborne Topographic and Bathymetric LiDAR. J. Coast. Res. 2011, 62, 50–61.
- Wozencraft, J.; Millar, D. Airborne LiDAR and Integrated Technologies for Coastal Mapping and Nautical Charting. Mar. Technol. Soc. J. 2005, 39, 27–35.
- Andersen, M.S.; Gergely, Á.; Al-Hamdani, Z.; Steinbacher, F.; Larsen, L.R.; Ernstsen, V.B. Processing and performance of topobathymetric LiDAR data for geomorphometric and morphological classification in a high-energy tidal environment. Hydrol. Earth Syst. Sci. 2017, 21, 43–63.
- Collin, A.; Archambault, P.; Long, B. Mapping the Shallow Water Seabed Habitat with the SHOALS. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2947–2955.
- Close, M.; Doneus, I.; Miholjek, G.; Mandlburger, N.; Doneus, G.; Verhoeven, C.; Briese, M. Pregesbauer Airborne Laser Bathymetry for Documentation of Submerged Archaeological Sites in Shallow Water. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 99–107.
- Long, B.; Aucoin, F.; Montreuil, S.; Robitaille, V.; Xhardé, R. Airborne LiDAR Bathymetry Applied to Coastal Hydrodynamic Processes. Coast. Eng. Proc. 2011, 1, 26.
- Diesing, M.; Mitchell, P.; Stephens, D. Image-based seabed classification: What can we learn from terrestrial remote sensing? ICES J. Mar. Sci. 2016, 73, 2425–2441.
- Fogarin, S.; Madricardo, F.; Zaggia, L.; Sigovini, M.; Montereale-Gavazzi, G.; Kruss, A.; Lorenzetti, G.; Manfé, G.; Petrizzo, A.; Molinaroli, E.; et al. Tidal inlets in the Anthropocene: Geomorphology and benthic habitats of the Chioggia inlet, Venice Lagoon (Italy). Earth Surf. Process. Landf. 2019, 44, 2297–2315.
- Brown, C.J.; Todd, B.J.; Kostylev, V.E.; Pickrill, R.A. Image-based classification of multibeam sonar backscatter data for objective surficial sediment mapping of Georges Bank, Canada. Cont. Shelf Res. 2011, 31, S110–S119.
- Lucieer, V.; Lucieer, A. Fuzzy clustering for seafloor classification. Mar. Geol. 2009, 264, 230–241.
- Li, G.; Zhou, Q.; Xu, G.; Wang, X.; Han, W.; Wang, J.; Zhang, G.; Zhang, Y.; Yuan, Z.; Song, S.; et al. LiDAR-radar for underwater target detection using a modulated sub-nanosecond Q-switched laser. Opt. Laser Technol. 2021, 142, 107234.
- Chen, X.; Kong, W.; Chen, T.; Liu, H.; Huang, G.; Shu, R. High-repetition-rate, sub-nanosecond and narrow-bandwidth fiber-laser-pumped green laser for photon-counting shallow-water bathymetric LiDAR. Results Phys. 2020, 19, 103563.
- Hu, M.; Mao, J.; Li, J.; Wang, Q.; Zhang, Y. A Novel Lidar Signal Denoising Method Based on Convolutional Autoencoding Deep Learning Neural Network. Atmosphere 2021, 12, 1403.
- Kogut, T.; Weistock, M. Classifying airborne bathymetry data using the Random Forest algorithm. Remote Sens. Lett. 2019, 10, 874–882.
- Kogut, T.; Slowik, A. Classification of Airborne Laser Bathymetry Data Using Artificial Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1959–1966.
- Hansen, S.S.; Ernstsen, V.B.; Andersen, M.S.; Al-Hamdani, Z.; Baran, R.; Niederwieser, M.; Steinbacher, F.; Kroon, A. Classification of Boulders in Coastal Environments Using Random Forest Machine Learning on Topo-Bathymetric LiDAR Data. Remote Sens. 2021, 13, 4101.
- Letard, M.; Collin, A.; Corpetti, T.; Lague, D.; Pastol, Y.; Ekelund, A. Classification of Land-Water Continuum Habitats Using Exclusively Airborne Topobathymetric Lidar Green Waveforms and Infrared Intensity Point Clouds. Remote Sens. 2022, 14, 341.
- Wang, A.; He, X.; Ghamisi, P.; Chen, Y. LiDAR Data Classification Using Morphological Profiles and Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 774–778.
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 1–14.
- Shanjiang, H.; Yan, H.; Bangyi, T.; Jiayong, Y.; Weibiao, C. Classification of sea and land waveforms based on deep learning for airborne laser bathymetry. Infrared Laser Eng. 2019, 48, 1113004.
- Liu, W.; Sun, J.; Li, W.; Hu, T.; Wang, P. Deep Learning on Point Clouds and Its Application: A Survey. Sensors 2019, 19, 4188.
- Diab, A.; Kashef, R.; Shaker, A. Deep Learning for LiDAR Point Cloud Classification in Remote Sensing. Sensors 2022, 22, 7868.
This entry is offline, you can click here to edit this entry!