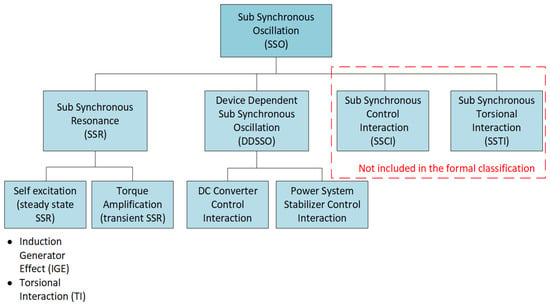
The definition of SSO according to the IEEE Sub Synchronous Resonance Working Group is as follows. “Sub synchronous oscillation is an electric power system condition where the electric network exchanges significant energy with a turbine generator at one or more of the natural frequencies of the combined system below the synchronous frequency of the system following a disturbance from equilibrium”. According to the classification of SSO by the IEEE Sub Synchronous Resonance Working Group, there are two types of SSO, namely sub synchronous resonance (SSR) and device dependent sub synchronous oscillation (DDSSO). Sub synchronous control interaction (SSCI) and sub synchronous torsional interaction (SSTI) are other types of SSO. However, they are not included in the formal classification.
1. Introduction
Figure 2 below shows an extended classification of SSO based on the formal classification by the IEEE Sub Synchronous Resonance Group and other types of SSO.
Figure 2. Extended classification of sub synchronous oscillation.
2. Sub Synchronous Resonance (SSR)
Sub synchronous resonance is defined as the “oscillatory attributes of electrical and mechanical variables associated with turbine generators when coupled to a series capacitor compensated transmission system where the oscillatory energy interchange is lightly damped, undamped or even negatively damped and growing” [
13].
Series compensation is deployed in transmission lines to enhance the power transmission capability. The level of series compensation is the ratio of impedance of the series capacitor and the impedance of the transmission line. Generally, the level of series compensation ranges from 20–80% [
14,
19]. However, when the multi mass turbine generators are connected to series compensated lines, it will cause sustained or growing oscillations due to the exchange of energy between the electric network and the turbine generator at one or more natural frequencies of electrical and mechanical components of the combined system [
13,
14,
20]. This condition is termed as SSR. Self-excitation and torque amplification are the two aspects of SSR.
2.1.Self Excitation
Self-excitation is caused when the sub synchronous armature currents are sustained or enhanced by the sub synchronous armature voltage components, resulting from the induced sub synchronous rotor currents [
13]. It is also referred to as steady state SSR.
Induction generator effect (IGE) is a form of self-excitation which occurs when the negative resistance to the sub synchronous current as viewed from the armature terminal exceeds the sum of armature and network resistance. It is a purely electrical phenomenon [
13,
20]. IGE occurs mostly in power systems with a higher level of series compensation [
21]. Torsional interaction (TI) is the second type of self-excitation and involves electrical and mechanical dynamics of the system. When the equilibrium of the power system is disturbed, the turbine generator shaft system will oscillate at its torsional natural frequencies, thus inducing armature voltage components. If the induced sub synchronous armature voltage components are close to the electrical natural frequency of the system, a rotor torque will be produced. Self-excitation occurs if the sub synchronous torque component in phase with the rotor velocity deviation is equal to or exceeds the inherent damping torque of the rotating system. This is termed as torsional interaction [
13,
20]. TI occurs when the ratio of inertia between the turbine and generator are equal. The occurrence of TI in hydro power plants is less, as the generator inertia is much higher than that of hydro turbines. TI in wind power plants is also rare, as the low shaft stiffness of the wind turbine drive train causes torsional modes with low frequency [
14,
22].
2.2. Torque Amplification (TA)
TA is also called transient SSR and can occur due to network faults or switching operations. If the frequency of the electromagnetic torque component induced due to the interaction of the armature magnetic field with the magnetic field of the rotor coincides with the natural frequencies of the generator shaft, large torques will be observed due to resonance of electrical and mechanical natural frequencies. This phenomenon is defined as TA [
14]. TA may cause fatigue in turbine generator shafts [
13].
2. Device Dependent Sub Synchronous Oscillation (DDSSO)
DDSSO is the type of SSO that occurs when the turbine generator torsional system interacts with other power system components, such as HVDC converter controls, power system stabilizers (PSS), static var compensator (SVC), variable speed drives, or high-speed governor controls. In other words, DDSSO may occur due to the interaction of torsional systems of the turbine generator with any power control device having a wide bandwidth or any device having rapid response to speed or power variations in the sub synchronous frequency range [
13,
20]. DC converter control interaction and power system stabilizer control interaction are the sub classes of DDSSO. DC converter control interaction is caused by the interaction between the speed voltage component of the turbine generator and the firing angle of the of DC converter. Power system stabilizer control interaction occurs due to the voltage modulation of the generator field when there is a significant component of the generator speed in phase with the generator and exciter torque [
13].
3. Sub Synchronous Control Interaction (SSCI)
SSCI is a new type of device dependent SSO caused by the interaction of a series compensated transmission system with a power electronic device. SSCI is differentiated from SSR, by the fact that it involves only electrical and control interactions and does not involve any mechanical interactions [
23]. Although some researchers question whether IGE and SSCI are the same phenomenon, it is worthy to note that SSCI occurs only in asynchronous machines whereas IGE occurs in synchronous and asynchronous machines both [
14]. Furthermore, SSCI occurs quicker in comparison to SSR, as it depends on the power electronic controller algorithm and may also grow faster due to the undamped oscillations being involved only with electrical and control interactions and not on mechanical components [
14,
21,
23]. While SSR and SSTI depend on fixed torsional modes of the turbine generator, SSCI does not depend on a fixed frequency [
23].
4. Sub Synchronous Torsional Interaction (SSTI)
SSTI is a device dependent SSO which occurs when the mechanical masses of a generator interact with power electronic devices, such as HVDC link, FACTS devices, PSS, or other power electronic devices [
14,
21,
23]. SSTI should not be confused with TI. SSTI is different than SSR because the interactions which occur between the generator and power electronic device during SSTI does not involve resonance [
14,
24]. SVC and HVDC converters are the most vulnerable power electronic devices to SSTI [
21]. Risk of SSTI in wind turbine generators is very low. This is because the low shaft stiffness coefficient only leads to low torsional natural frequencies [
24,
25].
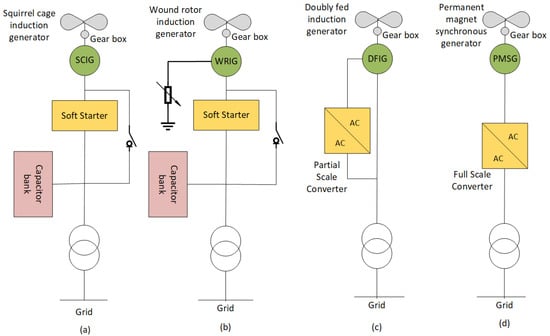
SSO could be triggered by the interaction of various devices with the power network. Potential occurrence of SSO in different devices is summarized in Table 1 below. Figure 3 below indicates the grid interfacing configuration of each WTG type.
Figure 3. Grid interfacing configurations of WTGs (a) Type 1, (b) Type 2, (c) Type 3, and (d) Type 4.
Table 1. Vulnerability of occurrence of SSO in different devices.
| Device Type |
SSR-IGE |
SSR-TI |
SSTI |
SSCI |
| Synchronous generator |
✓ |
✓ |
✓ |
🗶 |
| WTG type 1 |
✓ |
✓ |
🗶 |
🗶 |
| WTG type 2 |
✓ |
🗶 |
🗶 |
🗶 |
| WTG type 3 |
✓ |
✓ |
🗶 |
✓ |
| WTG type 4 |
🗶 |
🗶 |
🗶 |
✓ |
| HVDC |
🗶 |
🗶 |
✓ |
🗶 |
| SVC |
🗶 |
🗶 |
✓ |
✓ |
This entry is adapted from the peer-reviewed paper 10.3390/en15228477