In mathematics, the sine is a trigonometric function of an angle. The sine of an acute angle is defined in the context of a right triangle: for the specified angle, it is the ratio of the length of the side that is opposite that angle, to the length of the longest side of the triangle (the hypotenuse). For an angle [math]\displaystyle{ x }[/math], the sine function is denoted simply as [math]\displaystyle{ \sin x }[/math]. More generally, the definition of sine (and other trigonometric functions) can be extended to any real value in terms of the length of a certain line segment in a unit circle. More modern definitions express the sine as an infinite series, or as the solution of certain differential equations, allowing their extension to arbitrary positive and negative values and even to complex numbers. The sine function is commonly used to model periodic phenomena such as sound and light waves, the position and velocity of harmonic oscillators, sunlight intensity and day length, and average temperature variations throughout the year. The function sine can be traced to the jyā and koṭi-jyā functions used in Gupta period Indian astronomy (Aryabhatiya, Surya Siddhanta), via translation from Sanskrit to Arabic, and then from Arabic to Latin. The word "sine" (Latin "sinus") comes from a Latin mistranslation by Robert of Chester of the Arabic jiba, which is a transliteration of the Sanskrit word for half the chord, jya-ardha.
- sine function
- oscillators
- model
1. Right-angled Triangle Definition
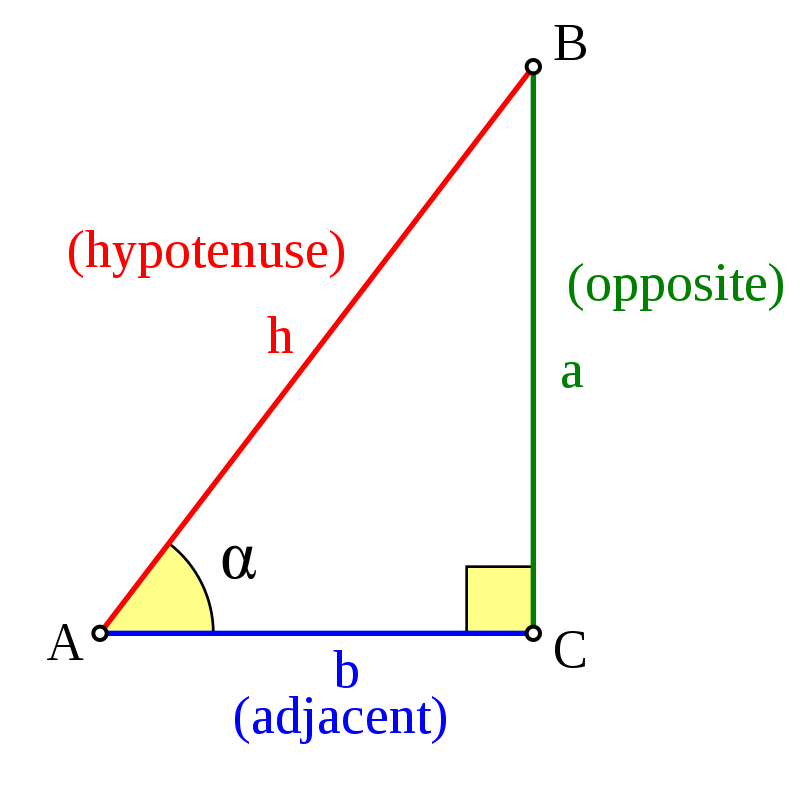
To define the sine function of an acute angle α, start with a right triangle that contains an angle of measure α; in the accompanying figure, angle α in triangle ABC is the angle of interest. The three sides of the triangle are named as follows:
- The opposite side is the side opposite to the angle of interest, in this case side a.
- The hypotenuse is the side opposite the right angle, in this case side h. The hypotenuse is always the longest side of a right-angled triangle.
- The adjacent side is the remaining side, in this case side b. It forms a side of (and is adjacent to) both the angle of interest (angle A) and the right angle.
Once such a triangle is chosen, the sine of the angle is equal to the length of the opposite side, divided by the length of the hypotenuse:[1]
- [math]\displaystyle{ \sin(\alpha) = \frac {\textrm{opposite}} {\textrm{hypotenuse}} }[/math]
The other trigonometric functions of the angle can be defined similarly; for example, the cosine of the angle is the ratio between the adjacent side and the hypotenuse, while the tangent gives the ratio between the opposite and adjacent sides.[1]
As stated, the value [math]\displaystyle{ \sin(\alpha) }[/math] appears to depend on the choice of right triangle containing an angle of measure α. However, this is not the case: all such triangles are similar, and so the ratio is the same for each of them.
2. Unit Circle Definition
In trigonometry, a unit circle is the circle of radius one centered at the origin (0, 0) in the Cartesian coordinate system.
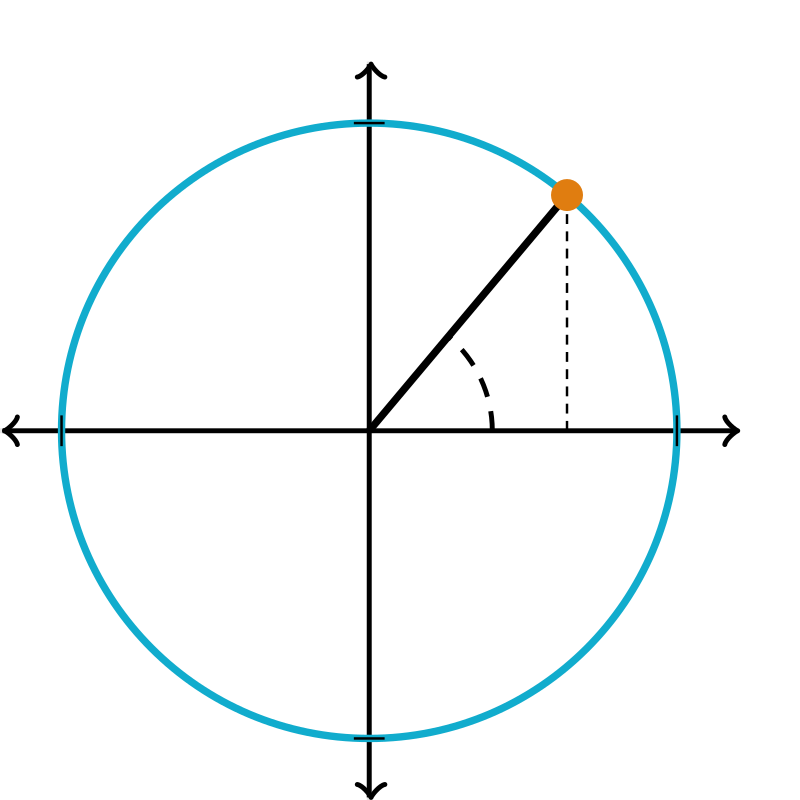
Let a line through the origin intersect the unit circle, making an angle of θ with the positive half of the x-axis. The x- and y-coordinates of this point of intersection are equal to cos(θ) and sin(θ), respectively. This definition is consistent with the right-angled triangle definition of sine and cosine when 0° < θ < 90°: because the length of the hypotenuse of the unit circle is always 1, [math]\displaystyle{ \sin(\theta) = \frac {\text{opposite}} {\text{hypotenuse}} = \frac {\text{opposite}} {1} = {\text{opposite}} }[/math]. The length of the opposite side of the triangle is simply the y-coordinate. A similar argument can be made for the cosine function to show that [math]\displaystyle{ \cos (\theta) = \frac {\text{adjacent}}{\text{hypotenuse}} }[/math] when 0° < θ < 90°, even under the new definition using the unit circle. tan(θ) is then defined as [math]\displaystyle{ \frac{\sin(\theta)}{\cos(\theta)} }[/math], or, equivalently, as the slope of the line segment.
Using the unit circle definition has the advantage that the angle can be extended to any real argument. This can also be achieved by requiring certain symmetries, and that sine be a periodic function.

Animation showing how the sine function (in red) [math]\displaystyle{ y = \sin(\theta) }[/math] is graphed from the y-coordinate (red dot) of a point on the unit circle (in green), at an angle of θ. By Lucas Vieira - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=31642523
3. Identities
Exact identities (using radians):
These apply for all values of [math]\displaystyle{ \theta }[/math].
- [math]\displaystyle{ \sin(\theta) = \cos\left(\frac{\pi}{2} - \theta \right) = \frac{1}{\csc(\theta)} }[/math]
3.1. Reciprocal
The reciprocal of sine is cosecant, i.e., the reciprocal of sin(A) is csc(A), or cosec(A). Cosecant gives the ratio of the length of the hypotenuse to the length of the opposite side:
- [math]\displaystyle{ \csc(A) = \frac{1}{\sin(A)} = \frac {\textrm{hypotenuse}} {\textrm{opposite}} = \frac{h}{a}. }[/math]
3.2. Inverse
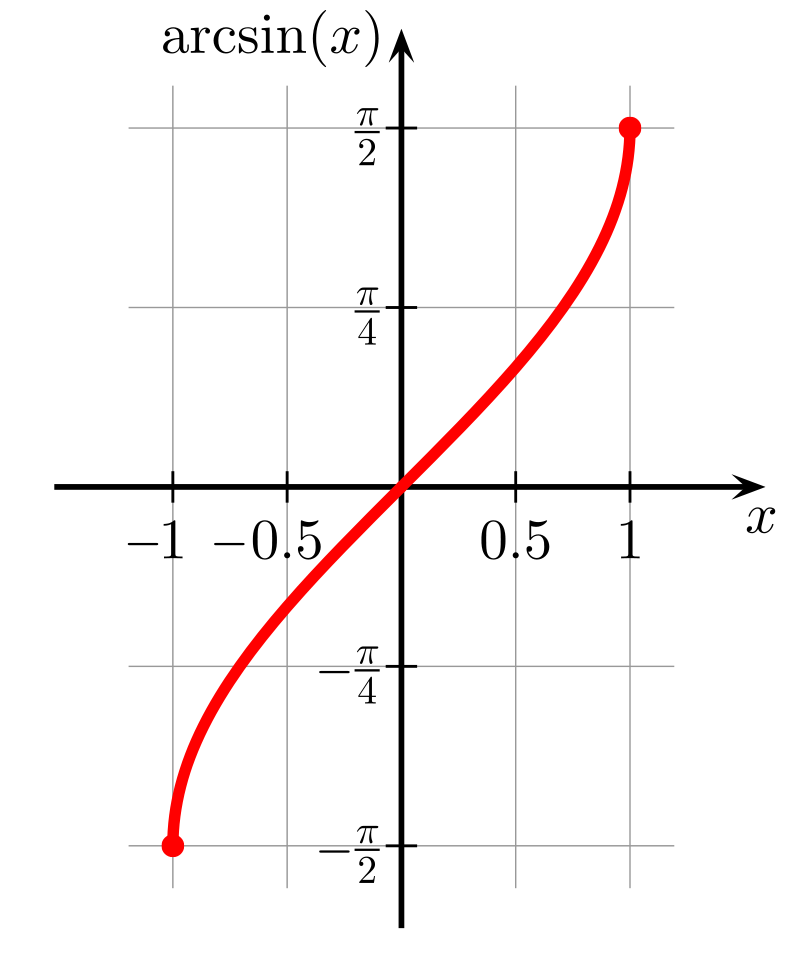 The usual principal values of the arcsin(x) function graphed on the Cartesian plane. Arcsin is the inverse of sin. By Geek3 - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=4033749
The usual principal values of the arcsin(x) function graphed on the Cartesian plane. Arcsin is the inverse of sin. By Geek3 - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=4033749The inverse function of sine is arcsine (arcsin or asin) or inverse sine (sin−1).As sine is non-injective, it is not an exact inverse function, but a partial inverse function. For example, sin(0) = 0, but also sin(π) = 0, sin(2π) = 0 etc. It follows that the arcsine function is multivalued: arcsin(0) = 0, but also arcsin(0) = π, arcsin(0) = 2π, etc. When only one value is desired, the function may be restricted to its principal branch. With this restriction, for each x in the domain, the expression arcsin(x) will evaluate only to a single value, called its principal value.
- [math]\displaystyle{ \theta = \arcsin \left( \frac{\text{opposite}}{\text{hypotenuse}} \right) = \sin^{-1} \left( \frac {o}{h} \right). }[/math]
where (for some integer k):
- [math]\displaystyle{ \begin{align} \sin(y) = x \iff & y = \arcsin(x) + 2\pi k , \text{ or }\\ & y = \pi - \arcsin(x) + 2\pi k \end{align} }[/math]
Or in one equation:
- [math]\displaystyle{ \sin(y) = x \iff y = (-1)^k \arcsin(x) + \pi k }[/math]
By definition, arcsine satisfies the equation:
- [math]\displaystyle{ \sin(\arcsin(x)) = x }[/math]
and
- [math]\displaystyle{ \arcsin(\sin(\theta)) = \theta\quad\text{for }-\frac{\pi}{2} \leq \theta \leq \frac{\pi}{2}. }[/math]
3.3. Calculus
For the sine function:
- [math]\displaystyle{ f(x) = \sin(x) }[/math]
The derivative is:
- [math]\displaystyle{ f'(x) = \cos(x) }[/math]
The antiderivative is:
- [math]\displaystyle{ \int f(x)\,dx = -\cos(x) + C }[/math]
where C denotes the constant of integration.[2]
3.4. Other Trigonometric Functions
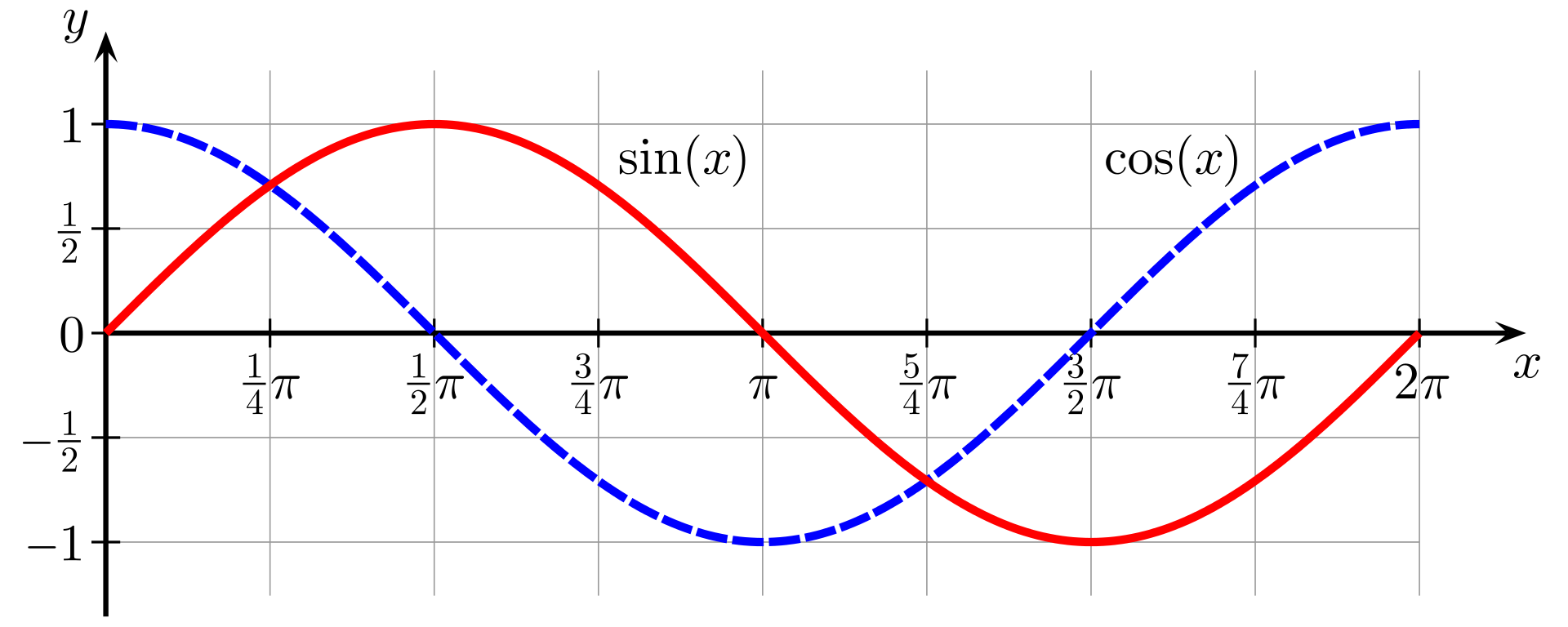 The sine and cosine functions are related in multiple ways. The two functions are out of phase by 90°: [math]\displaystyle{ \sin(\pi/2 - x) }[/math] = [math]\displaystyle{ \cos(x) }[/math] for all angles x. Also, the derivative of the function sin(x) is cos(x). By Geek3 - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=10904768
The sine and cosine functions are related in multiple ways. The two functions are out of phase by 90°: [math]\displaystyle{ \sin(\pi/2 - x) }[/math] = [math]\displaystyle{ \cos(x) }[/math] for all angles x. Also, the derivative of the function sin(x) is cos(x). By Geek3 - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=10904768It is possible to express any trigonometric function in terms of any other (up to a plus or minus sign, or using the sign function).
The following table documents how sine can be expressed in terms of the other common trigonometric functions:
| f(θ) | |f(θ)| | Sign | |||||
|---|---|---|---|---|---|---|---|
| By quadrant | Sign function (sgn) | ||||||
| I | II | III | IV | ||||
| cos | [math]\displaystyle{ \sin(\theta) }[/math] | [math]\displaystyle{ \sqrt{1 - \cos^2(\theta)} }[/math] | + | + | − | − | [math]\displaystyle{ \sgn\left(\cos \left(\theta - \frac{\pi}{2}\right)\right) }[/math] |
| [math]\displaystyle{ \cos(\theta) }[/math] | [math]\displaystyle{ \sqrt{1 - \sin^2(\theta)} }[/math] | + | − | − | + | [math]\displaystyle{ \sgn\left(\sin\left(\theta + \frac{\pi}{2}\right)\right) }[/math] | |
| cot | [math]\displaystyle{ \sin(\theta) }[/math] | [math]\displaystyle{ \frac{1}{\sqrt{1 + \cot^2(\theta)}} }[/math] | + | + | − | − | [math]\displaystyle{ \sgn\left(\cot\left(\frac{\theta}{2}\right)\right) }[/math] |
| [math]\displaystyle{ \cot(\theta) }[/math] | [math]\displaystyle{ \frac{\sqrt{1 - \sin^2(\theta)}}{\sin(\theta)} }[/math] | + | − | − | + | [math]\displaystyle{ \sgn\left(\sin\left(\theta + \frac{\pi}{2}\right)\right) }[/math] | |
| tan | [math]\displaystyle{ \sin(\theta) }[/math] | [math]\displaystyle{ \frac{\tan(\theta)}{\sqrt{1 + \tan^2(\theta)}} }[/math] | + | − | − | + | [math]\displaystyle{ \sgn\left(\tan\left(\frac{2\theta + \pi}{4}\right)\right) }[/math] |
| [math]\displaystyle{ \tan(\theta) }[/math] | [math]\displaystyle{ \frac{\sin(\theta)}{\sqrt{1 - \sin^2(\theta)}} }[/math] | + | − | − | + | [math]\displaystyle{ \sgn\left(\sin\left(\theta + \frac{\pi}{2}\right)\right) }[/math] | |
| sec | [math]\displaystyle{ \sin(\theta) }[/math] | [math]\displaystyle{ \frac{\sqrt{\sec^2(\theta) - 1}}{\sec(\theta)} }[/math] | + | − | + | − | [math]\displaystyle{ \sgn\left(\sec\left(\frac{4 \theta - \pi}{2}\right)\right) }[/math] |
| [math]\displaystyle{ \sec(\theta) }[/math] | [math]\displaystyle{ \frac{1}{\sqrt{1 - \sin^2(\theta)}} }[/math] | + | − | − | + | [math]\displaystyle{ \sgn\left(\sin\left(\theta + \frac{\pi}{2}\right)\right) }[/math] | |
For all equations which use plus/minus (±), the result is positive for angles in the first quadrant.
The basic relationship between the sine and the cosine can also be expressed as the Pythagorean trigonometric identity:[2]
- [math]\displaystyle{ \cos^2(\theta) + \sin^2(\theta) = 1 }[/math]
where sin2(x) means (sin(x))2.
3.5. Sine Squared Function
 Sine function in blue and sine squared function in red. The X axis is in radians. By Comfr - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=81225531
Sine function in blue and sine squared function in red. The X axis is in radians. By Comfr - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=81225531The graph shows both the sine function and the sine squared function, with the sine in blue and sine squared in red. Both graphs have the same shape, but with different ranges of values, and different periods. Sine squared has only positive values, but twice the number of periods.
The sine squared function can be expressed as a modified sine wave from the Pythagorean identity and power reduction—by the cosine double-angle formula:[3]
- [math]\displaystyle{ \sin^2(\theta) = \frac{1 - \sin\left(2\theta + \frac{\pi}{2}\right)}{2} }[/math]
4. Properties Relating to the Quadrants
 The four quadrants of a Cartesian coordinate system. By Pengo - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=11500082
The four quadrants of a Cartesian coordinate system. By Pengo - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=11500082The table below displays many of the key properties of the sine function (sign, monotonicity, convexity), arranged by the quadrant of the argument. For arguments outside those in the table, one may compute the corresponding information by using the periodicity [math]\displaystyle{ \sin(\alpha + 360^\circ) = \sin(\alpha) }[/math] of the sine function.
| Quadrant | Angle | Value | Sign | Monotony | Convexity | |
|---|---|---|---|---|---|---|
| Degrees | Radians | |||||
| 1st quadrant, I | [math]\displaystyle{ 0^\circ \lt x\lt 90^\circ }[/math] | [math]\displaystyle{ 0 \lt x \lt \frac{\pi}{2} }[/math] | [math]\displaystyle{ 0 \lt \sin(x) \lt 1 }[/math] | [math]\displaystyle{ + }[/math] | increasing | concave |
| 2nd quadrant, II | [math]\displaystyle{ 90^\circ \lt x \lt 180^\circ }[/math] | [math]\displaystyle{ \frac{\pi}{2} \lt x \lt \pi }[/math] | [math]\displaystyle{ 0 \lt \sin(x) \lt 1 }[/math] | [math]\displaystyle{ + }[/math] | decreasing | concave |
| 3rd quadrant, III | [math]\displaystyle{ 180^\circ \lt x \lt 270^\circ }[/math] | [math]\displaystyle{ \pi \lt x \lt \frac{3\pi}{2} }[/math] | [math]\displaystyle{ -1 \lt \sin(x) \lt 0 }[/math] | [math]\displaystyle{ - }[/math] | decreasing | convex |
| 4th quadrant, IV | [math]\displaystyle{ 270^\circ \lt x \lt 360^\circ }[/math] | [math]\displaystyle{ \frac{3\pi}{2} \lt x \lt 2\pi }[/math] | [math]\displaystyle{ -1 \lt \sin(x) \lt 0 }[/math] | [math]\displaystyle{ - }[/math] | increasing | convex |
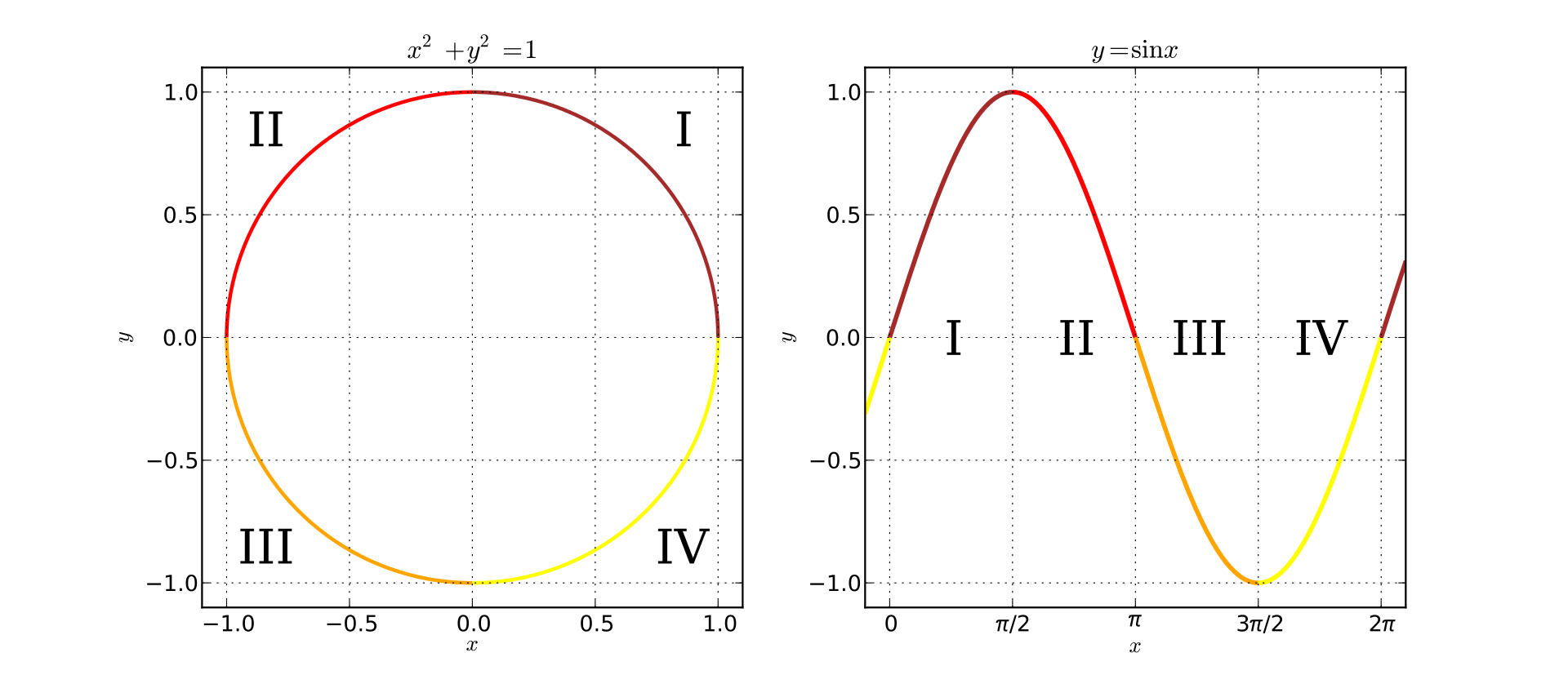 The quadrants of the unit circle and of sin(x), using the Cartesian coordinate system. By Pengo - Own work, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=11540847
The quadrants of the unit circle and of sin(x), using the Cartesian coordinate system. By Pengo - Own work, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=11540847The following table gives basic information at the boundary of the quadrants.
| Degrees | Radians | [math]\displaystyle{ \sin(x) }[/math] | Point type |
|---|---|---|---|
| [math]\displaystyle{ 0^\circ }[/math] | [math]\displaystyle{ 0 }[/math] | [math]\displaystyle{ 0 }[/math] | Root, inflection |
| [math]\displaystyle{ 90^\circ }[/math] | [math]\displaystyle{ \frac{\pi}{2} }[/math] | [math]\displaystyle{ 1 }[/math] | Maximum |
| [math]\displaystyle{ 180^\circ }[/math] | [math]\displaystyle{ \pi }[/math] | [math]\displaystyle{ 0 }[/math] | Root, inflection |
| [math]\displaystyle{ 270^\circ }[/math] | [math]\displaystyle{ \frac{3\pi}{2} }[/math] | [math]\displaystyle{ -1 }[/math] | Minimum |
5. Series Definition
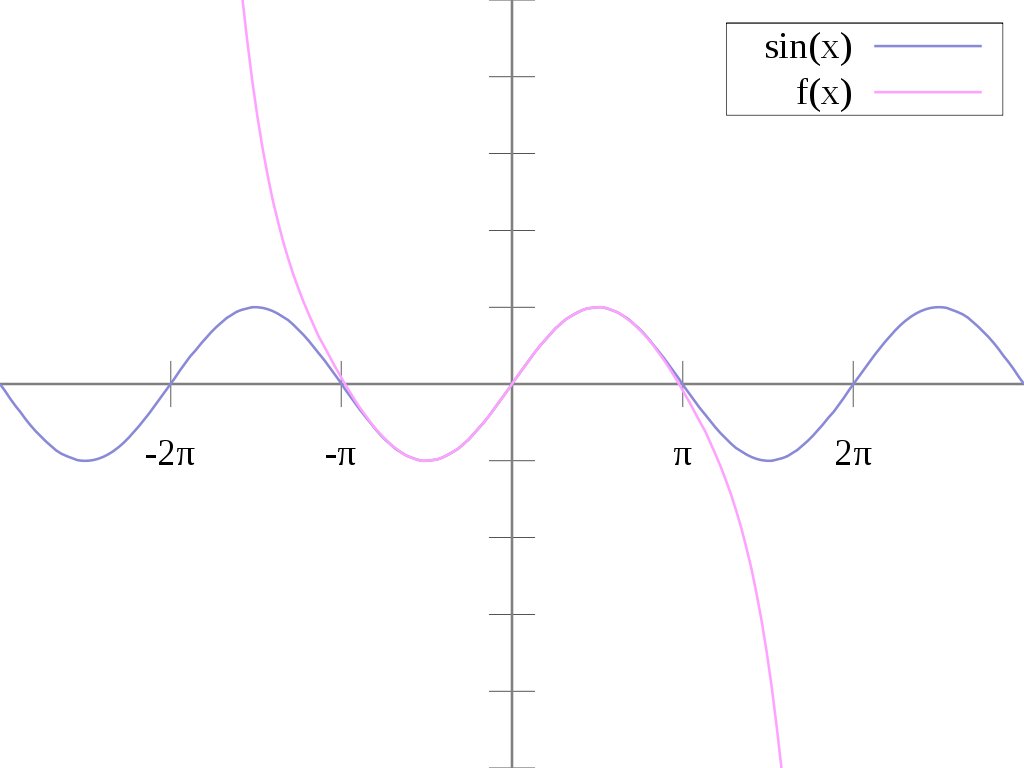 The sine function (blue) is closely approximated by its Taylor polynomial of degree 7 (pink) for a full cycle centered on the origin. By No machine-readable author provided. Riojajar~commonswiki assumed (based on copyright claims). - No machine-readable source provided. Own work assumed (based on copyright claims)., Public Domain, https://commons.wikimedia.org/w/index.php?curid=825819
The sine function (blue) is closely approximated by its Taylor polynomial of degree 7 (pink) for a full cycle centered on the origin. By No machine-readable author provided. Riojajar~commonswiki assumed (based on copyright claims). - No machine-readable source provided. Own work assumed (based on copyright claims)., Public Domain, https://commons.wikimedia.org/w/index.php?curid=825819
Using only geometry and properties of limits, it can be shown that the derivative of sine is cosine, and that the derivative of cosine is the negative of sine.
Using the reflection from the calculated geometric derivation of the sine is with the (4n+k)-th derivative at the point 0:
- [math]\displaystyle{ \sin^{(4n+k)}(0)=\begin{cases} 0 & \text{when } k=0 \\ 1 & \text{when } k=1 \\ 0 & \text{when } k=2 \\ -1 & \text{when } k=3 \end{cases} }[/math]
This gives the following Taylor series expansion at x = 0. One can then use the theory of Taylor series to show that the following identities hold for all real numbers x (where x is the angle in radians):[4]
- [math]\displaystyle{ \begin{align} \sin(x) &= x - \frac{x^3}{3!} + \frac{x^5}{5!} - \frac{x^7}{7!} + \cdots \\[8pt] & = \sum_{n=0}^\infty \frac{(-1)^n}{(2n+1)!}x^{2n+1} \\[8pt] \end{align} }[/math]
If x were expressed in degrees then the series would contain factors involving powers of π/180: if x is the number of degrees, the number of radians is y = πx /180, so
- [math]\displaystyle{ \begin{align} \sin(x_\mathrm{deg}) & = \sin(y_\mathrm{rad}) \\ & = \frac{\pi}{180} x - \left (\frac{\pi}{180} \right )^3 \frac{x^3}{3!} + \left (\frac{\pi}{180} \right )^5 \frac{x^5}{5!} - \left (\frac{\pi}{180} \right )^7 \frac{x^7}{7!} + \cdots . \end{align} }[/math]
The series formulas for the sine and cosine are uniquely determined, up to the choice of unit for angles, by the requirements that
- [math]\displaystyle{ \begin{align} \sin(0) = 0 & \text{ and } \sin(2x) = 2 \sin(x) \cos(x) \\ \cos^2(x) + \sin^2(x) = 1 & \text{ and } \cos(2x) = \cos^2(x) - \sin^2(x) \\ \end{align} }[/math]
The radian is the unit that leads to the expansion with leading coefficient 1 for the sine and is determined by the additional requirement that
- [math]\displaystyle{ \sin(x) \approx x \text{ when } x \approx 0. }[/math]
The coefficients for both the sine and cosine series may therefore be derived by substituting their expansions into the Pythagorean and double angle identities, taking the leading coefficient for the sine to be 1, and matching the remaining coefficients.
In general, mathematically important relationships between the sine and cosine functions and the exponential function (see, for example, Euler's formula) are substantially simplified when angles are expressed in radians, rather than in degrees, grads or other units. Therefore, in most branches of mathematics beyond practical geometry, angles are generally assumed to be expressed in radians.
A similar series is Gregory's series for arctan, which is obtained by omitting the factorials in the denominator.
Continued fraction
The sine function can also be represented as a generalized continued fraction:
- [math]\displaystyle{ \sin(x) = \cfrac{x}{1 + \cfrac{x^2}{2\cdot3-x^2 + \cfrac{2\cdot3 x^2}{4\cdot5-x^2 + \cfrac{4\cdot5 x^2}{6\cdot7-x^2 + \ddots}}}}. }[/math]
The continued fraction representation can be derived from Euler's continued fraction formula and expresses the real number values, both rational and irrational, of the sine function.
6. Fixed Point
 The fixed point iteration xn+1 = sin(xn) with initial value x0 = 2 converges to 0. CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=1641553
The fixed point iteration xn+1 = sin(xn) with initial value x0 = 2 converges to 0. CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=1641553Zero is the only real fixed point of the sine function; in other words the only intersection of the sine function and the identity function is [math]\displaystyle{ \sin(0)=0 }[/math].
7. Arc Length
The arc length of the sine curve between [math]\displaystyle{ a }[/math] and [math]\displaystyle{ b }[/math] is [math]\displaystyle{ \int_a^b\!\sqrt{1+\cos^2(x)}\, dx =\sqrt{2}(\operatorname{E}(b,1/\sqrt{2})-\operatorname{E}(a,1/\sqrt{2})) }[/math], where [math]\displaystyle{ \operatorname{E}(\varphi,k) }[/math] is the incomplete elliptic integral of the second kind with modulus [math]\displaystyle{ k }[/math].
The arc length for a full period is [math]\displaystyle{ L = 4\sqrt{2\pi ^3}/\Gamma(1/4)^2 + \Gamma(1/4)^2/\sqrt{2\pi} = 7.640395578\ldots }[/math] where [math]\displaystyle{ \Gamma }[/math] is the gamma function. This can be calculated very rapidly using the arithmetic–geometric mean: [math]\displaystyle{ L=2\operatorname{M}(1,\sqrt{2})+2\pi /\operatorname{M}(1,\sqrt{2}) }[/math].[5] In fact, [math]\displaystyle{ L }[/math] is the circumference of an ellipse when the length of the semi-major axis equals [math]\displaystyle{ \sqrt{2} }[/math] and the length of the semi-minor axis equals [math]\displaystyle{ 1 }[/math].[5]
The arc length of the sine curve from [math]\displaystyle{ 0 }[/math] to [math]\displaystyle{ x }[/math] is [math]\displaystyle{ Lx/(2\pi) }[/math], plus a correction that varies periodically in [math]\displaystyle{ x }[/math] with period [math]\displaystyle{ \pi }[/math]. The Fourier series for this correction can be written in closed form using special functions. The sine curve arc length from [math]\displaystyle{ 0 }[/math] to [math]\displaystyle{ x }[/math] is[6]
- [math]\displaystyle{ \left(\frac{\operatorname{M}(1,\sqrt{2})}{\pi}+\frac{1}{\operatorname{M}(1,\sqrt{2})}\right)x+\sqrt{2}\sum_{n=1}^\infty \frac{(-1)^n\tbinom{n-3/2}{n}}{2^{3n}n} {}_2F_1\left(n-\frac{1}{2},n+\frac{1}{2};2n+1;\frac{1}{2}\right)\sin (2nx), }[/math]
where [math]\displaystyle{ {}_2F_1 }[/math] is the hypergeometric function. The terms of the arc length expression can be approximated as
- [math]\displaystyle{ 1.21600672x + 0.10317093 \sin(2x) - 0.00220445\sin(4x) + 0.00012584\sin(6x) - 0.00001011\sin(8 x) + \cdots }[/math]
8. Law of Sines
The law of sines states that for an arbitrary triangle with sides a, b, and c and angles opposite those sides A, B and C:
- [math]\displaystyle{ \frac{\sin A}{a} = \frac{\sin B}{b} = \frac{\sin C}{c}. }[/math]
This is equivalent to the equality of the first three expressions below:
- [math]\displaystyle{ \frac{a}{\sin A} = \frac{b}{\sin B} = \frac{c}{\sin C} = 2R, }[/math]
where R is the triangle's circumradius.
It can be proven by dividing the triangle into two right ones and using the above definition of sine. The law of sines is useful for computing the lengths of the unknown sides in a triangle if two angles and one side are known. This is a common situation occurring in triangulation, a technique to determine unknown distances by measuring two angles and an accessible enclosed distance.
9. Special Values
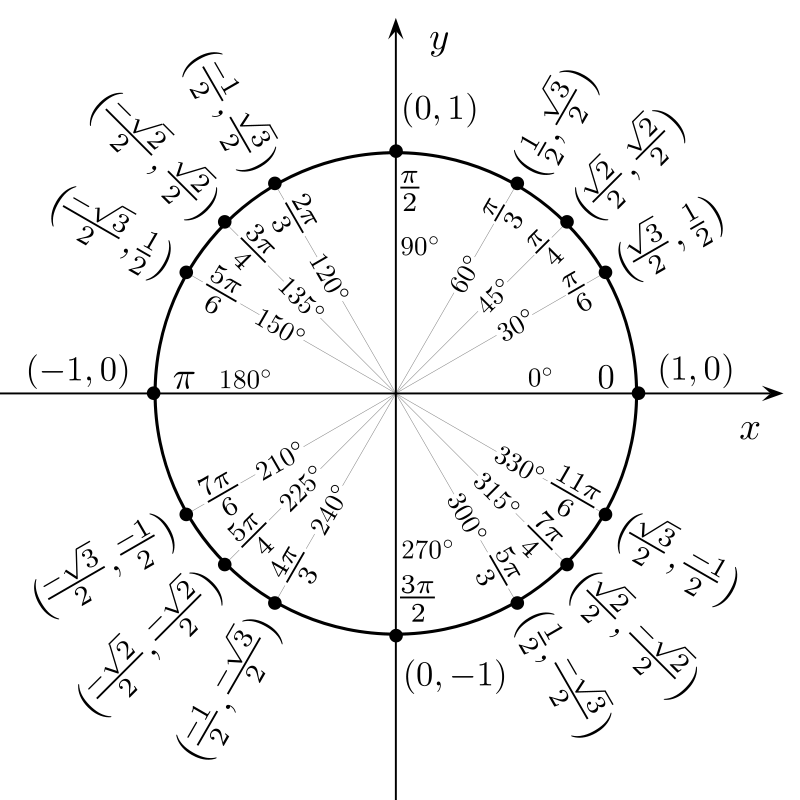 Some common angles (θ) shown on the unit circle. The angles are given in degrees and radians, together with the corresponding intersection point on the unit circle, (cos(θ), sin(θ)). By Gustavb (talk · contribs) - Own work using: Eukleides, Public Domain, https://commons.wikimedia.org/w/index.php?curid=584159
Some common angles (θ) shown on the unit circle. The angles are given in degrees and radians, together with the corresponding intersection point on the unit circle, (cos(θ), sin(θ)). By Gustavb (talk · contribs) - Own work using: Eukleides, Public Domain, https://commons.wikimedia.org/w/index.php?curid=584159For certain integral numbers x of degrees, the value of sin(x) is particularly simple. A table of some of these values is given below.
| Angle, x | sin(x) | ||||
|---|---|---|---|---|---|
| Degrees | Radians | Gradians | Turns | Exact | Decimal |
| 0° | 0 | 0g | 0 | 0 | 0 |
| 180° | π | 200g | 1/2 | ||
| 15° | 1/12π | 16+2/3g | 1/24 | [math]\displaystyle{ \frac{\sqrt{6}-\sqrt{2}}{4} }[/math] | 0.258819045102521 |
| 165° | 11/12π | 183+1/3g | 11/24 | ||
| 30° | 1/6π | 33+1/3g | 1/12 | 1/2 | 0.5 |
| 150° | 5/6π | 166+2/3g | 5/12 | ||
| 45° | 1/4π | 50g | 1/8 | [math]\displaystyle{ \frac{\sqrt{2}}{2} }[/math] | 0.707106781186548 |
| 135° | 3/4π | 150g | 3/8 | ||
| 60° | 1/3π | 66+2/3g | 1/6 | [math]\displaystyle{ \frac{\sqrt{3}}{2} }[/math] | 0.866025403784439 |
| 120° | 2/3π | 133+1/3g | 1/3 | ||
| 75° | 5/12π | 83+1/3g | 5/24 | [math]\displaystyle{ \frac{\sqrt{6}+\sqrt{2}}{4} }[/math] | 0.965925826289068 |
| 105° | 7/12π | 116+2/3g | 7/24 | ||
| 90° | 1/2π | 100g | 1/4 | 1 | 1 |
90 degree increments:
| x in degrees | 0° | 90° | 180° | 270° | 360° |
|---|---|---|---|---|---|
| x in radians | 0 | π/2 | π | 3π/2 | 2π |
| x in gons | 0 | 100g | 200g | 300g | 400g |
| x in turns | 0 | 1/4 | 1/2 | 3/4 | 1 |
| sin x | 0 | 1 | 0 | −1 | 0 |
Other values not listed above:
- [math]\displaystyle{ \sin\left(\frac{\pi}{60}\right) = \sin(3^\circ)=\frac{(2-\sqrt{12})\sqrt{5+\sqrt5}+(\sqrt{10}-\sqrt2)(\sqrt3+1)}{16} }[/math] OEIS: A019812
- [math]\displaystyle{ \sin\left(\frac{\pi}{30}\right) = \sin(6^\circ)=\frac{\sqrt{30-\sqrt{180}}-\sqrt5-1}{8} }[/math] OEIS: A019815
- [math]\displaystyle{ \sin\left(\frac{\pi}{20}\right) = \sin(9^\circ)=\frac{\sqrt{10}+\sqrt2-\sqrt{20-\sqrt{80}}}{8} }[/math] OEIS: A019818
- [math]\displaystyle{ \sin\left(\frac{\pi}{15}\right) = \sin(12^\circ)=\frac{\sqrt{10+\sqrt{20}}+\sqrt{3}-\sqrt{15}}{8} }[/math] OEIS: A019821
- [math]\displaystyle{ \sin\left(\frac{\pi}{10}\right) = \sin(18^\circ)=\frac{\sqrt5-1}{4}=\tfrac{1}{2}\varphi^{-1} }[/math] OEIS: A019827
- [math]\displaystyle{ \sin\left(\frac{7\pi}{60}\right) = \sin(21^\circ)=\frac{(2+\sqrt{12})\sqrt{5-\sqrt5}-(\sqrt{10}+\sqrt2)(\sqrt3-1)}{16} }[/math] OEIS: A019830
- [math]\displaystyle{ \sin\left(\frac{\pi}{8}\right) = \sin(22.5^\circ)=\frac{\sqrt{2-\sqrt2}}{2} }[/math]
- [math]\displaystyle{ \sin\left(\frac{2\pi}{15}\right) = \sin(24^\circ)=\frac{\sqrt3+\sqrt{15}-\sqrt{10-\sqrt{20}}}{8} }[/math] OEIS: A019833
- [math]\displaystyle{ \sin\left(\frac{3\pi}{20}\right) = \sin(27^\circ)=\frac{\sqrt{20+\sqrt{80}}-\sqrt{10}+\sqrt2}{8} }[/math] OEIS: A019836
- [math]\displaystyle{ \sin\left(\frac{11\pi}{60}\right) = \sin(33^\circ)=\frac{(\sqrt{12}-2)\sqrt{5+\sqrt5}+(\sqrt{10}-\sqrt2)(\sqrt3+1)}{16} }[/math] OEIS: A019842
- [math]\displaystyle{ \sin\left(\frac{\pi}{5}\right) = \sin(36^\circ)=\frac{\sqrt{10-\sqrt{20}}}{4} }[/math] OEIS: A019845
- [math]\displaystyle{ \sin\left(\frac{13\pi}{60}\right) = \sin(39^\circ)=\frac{(2-\sqrt{12})\sqrt{5-\sqrt5}+(\sqrt{10}+\sqrt2)(\sqrt3+1)}{16} }[/math] OEIS: A019848
- [math]\displaystyle{ \sin\left(\frac{7\pi}{30}\right) = \sin(42^\circ)=\frac{\sqrt{30+\sqrt{180}}-\sqrt5+1}{8} }[/math] OEIS: A019851
10. Relationship to Complex Numbers
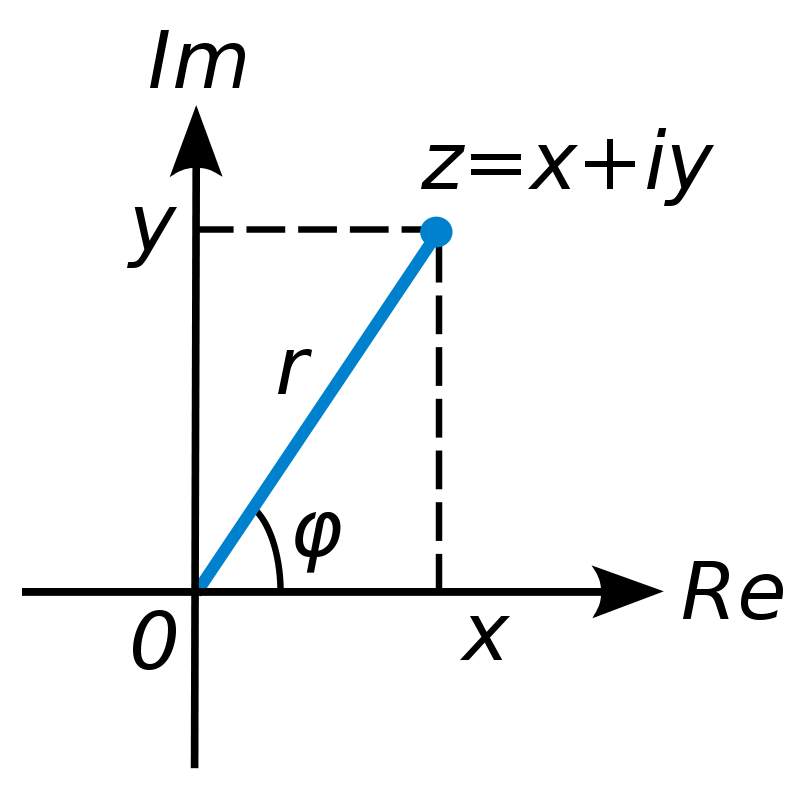 An illustration of the complex plane. The imaginary numbers are on the vertical coordinate axis. By This version, simplified for use in en:Sine: Pengo (talk)First version: http://ja.wikipedia.org/wiki/画像:Complex.png by jp:user:たまなるたみVectorized and tweaked: Complex_conjugate_picture.svg by Oleg Alexandrov - Complex_conjugate_picture.svg, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=11500957
An illustration of the complex plane. The imaginary numbers are on the vertical coordinate axis. By This version, simplified for use in en:Sine: Pengo (talk)First version: http://ja.wikipedia.org/wiki/画像:Complex.png by jp:user:たまなるたみVectorized and tweaked: Complex_conjugate_picture.svg by Oleg Alexandrov - Complex_conjugate_picture.svg, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=11500957Sine is used to determine the imaginary part of a complex number given in polar coordinates (r, φ):
- [math]\displaystyle{ z = r(\cos(\varphi) + i\sin(\varphi)) }[/math]
the imaginary part is:
- [math]\displaystyle{ \operatorname{Im}(z) = r \sin(\varphi) }[/math]
r and φ represent the magnitude and angle of the complex number respectively. i is the imaginary unit. z is a complex number.
Although dealing with complex numbers, sine's parameter in this usage is still a real number. Sine can also take a complex number as an argument.
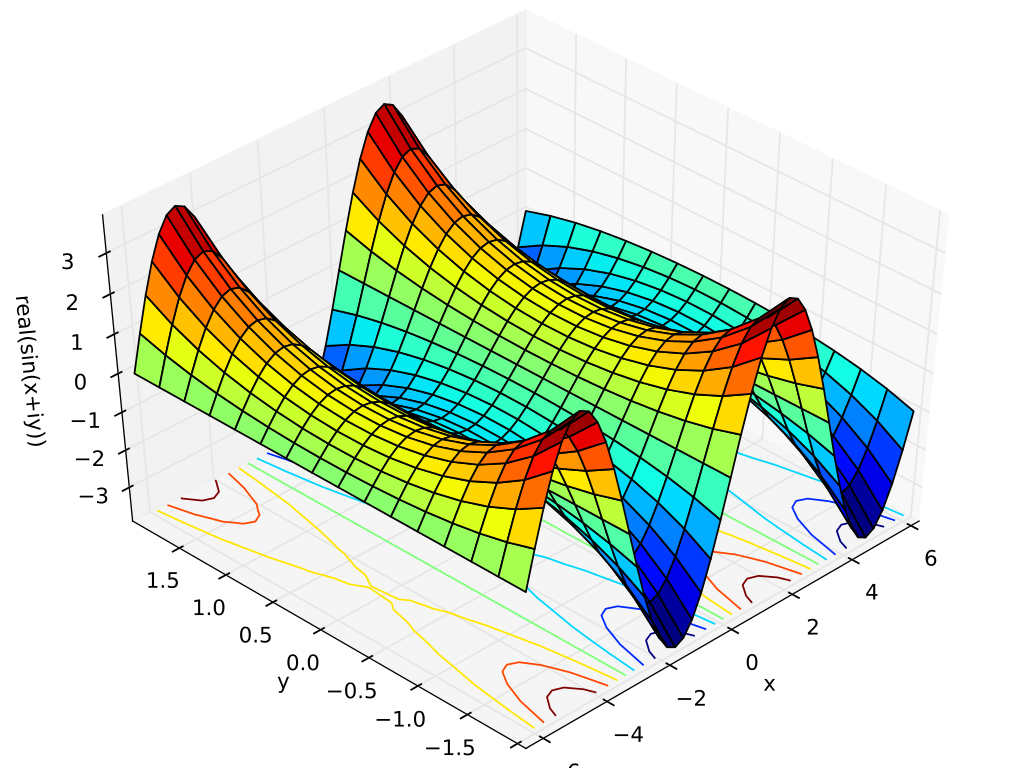
10.1. Sine with a Complex Argument
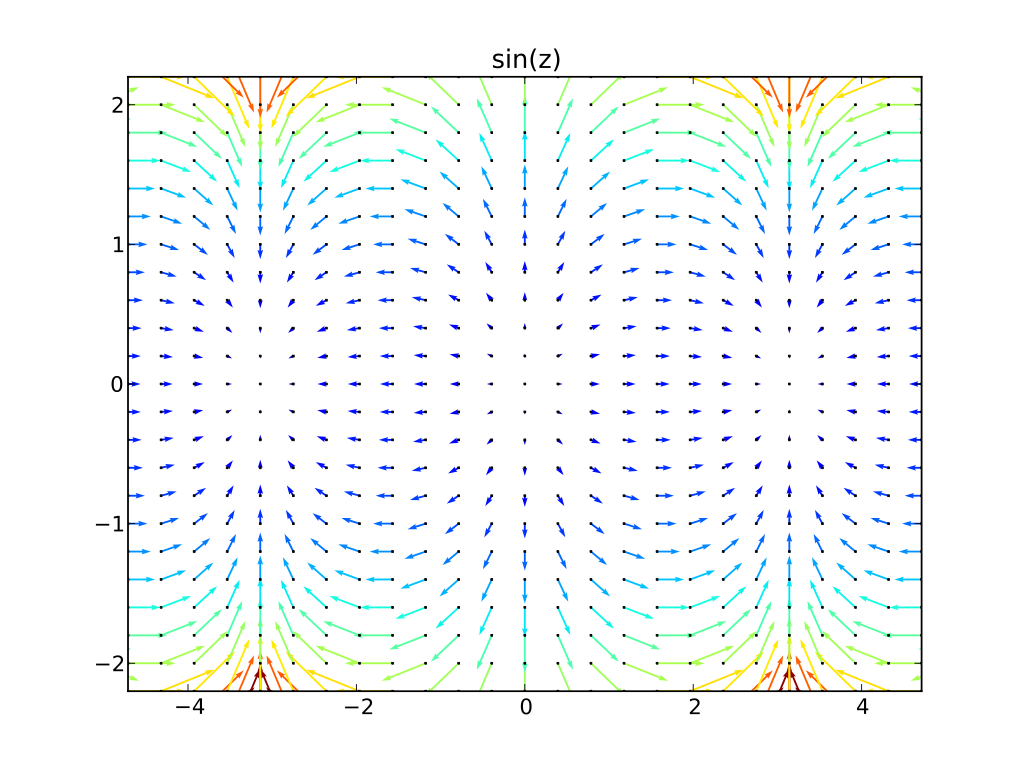 sin(z) as a vector field. By Pengo - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=11478667
sin(z) as a vector field. By Pengo - Own work, Public Domain, https://commons.wikimedia.org/w/index.php?curid=11478667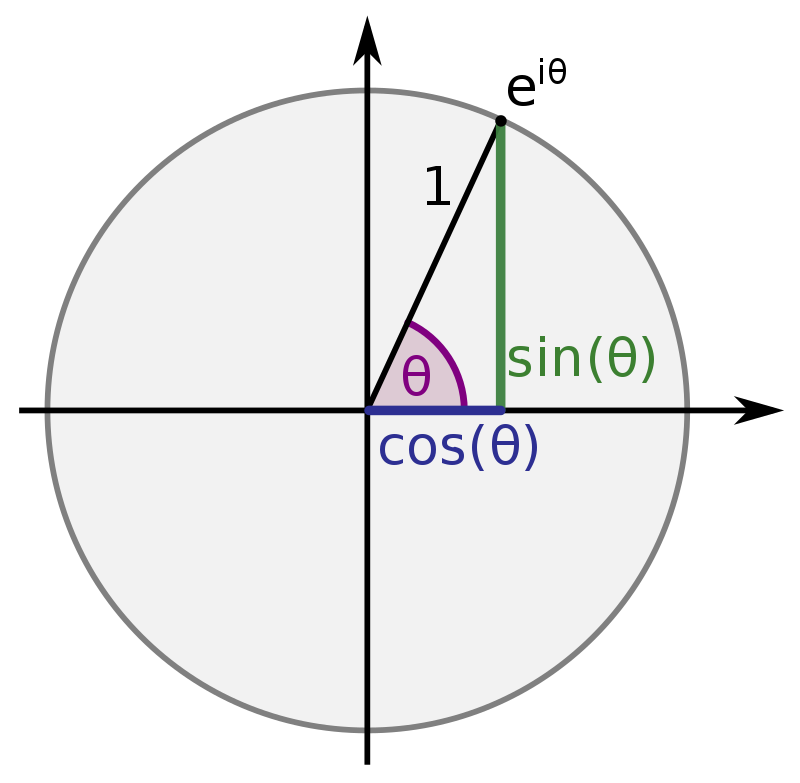 [math]\displaystyle{ \sin(\theta) }[/math] is the imaginary part of [math]\displaystyle{ e^{i\theta} }[/math]. By Stephan Kulla (User:Stephan Kulla) - Own work, CC0, https://commons.wikimedia.org/w/index.php?curid=57563357
[math]\displaystyle{ \sin(\theta) }[/math] is the imaginary part of [math]\displaystyle{ e^{i\theta} }[/math]. By Stephan Kulla (User:Stephan Kulla) - Own work, CC0, https://commons.wikimedia.org/w/index.php?curid=57563357The definition of the sine function for complex arguments z:
- [math]\displaystyle{ \begin{align} \sin(z)& = \sum_{n=0}^\infty \frac{(-1)^{n}}{(2n+1)!}z^{2n+1} \\ & = \frac{e^{i z} - e^{-i z}}{2i} \\ & = \frac{\sinh \left( i z\right) }{i} \\ & = -i \sinh \left(i z\right) \end{align} }[/math]
where i 2 = −1, and sinh is hyperbolic sine. This is an entire function. Also, for purely real x,
- [math]\displaystyle{ \sin(x) = \operatorname{Im}(e^{i x}). }[/math]
For purely imaginary numbers:
- [math]\displaystyle{ \sin(iy) = i \sinh(y). }[/math]
It is also sometimes useful to express the complex sine function in terms of the real and imaginary parts of its argument:
- [math]\displaystyle{ \begin{align} \sin (x + iy) &= \sin(x) \cos(iy) + \cos(x) \sin(iy) \\ &= \sin(x) \cosh(y) + i \cos(x) \sinh(y). \end{align} }[/math]
Partial fraction and product expansions of complex sine
Using the partial fraction expansion technique in complex analysis, one can find that the infinite series
- [math]\displaystyle{ \sum_{n = -\infty}^{\infty}\frac{(-1)^n}{z-n} = \frac{1}{z} -2z \sum_{n = 1}^{\infty}\frac{(-1)^n}{n^2 - z^2} }[/math]
both converge and are equal to [math]\displaystyle{ \frac{\pi}{\sin (\pi z)} }[/math]. Similarly, one can show that
- [math]\displaystyle{ \frac{\pi^2}{\sin^2 (\pi z)} = \sum_{n=-\infty}^\infty \frac{1}{(z - n)^2}. }[/math]
Using product expansion technique, one can derive
- [math]\displaystyle{ \sin(\pi z) = \pi z \prod_{n = 1}^\infty \left( 1 - \frac{z^2}{n^2} \right). }[/math]
Alternatively, the infinite product for the sine can be proved using complex Fourier series.
|
Proof of the infinite product for the sine
|
|---|
|
Using complex Fourier series, the function [math]\displaystyle{ \cos (zx) }[/math] can be decomposed as
Setting [math]\displaystyle{ x = \pi }[/math] yields
Therefore we get
The function [math]\displaystyle{ \pi \cot (\pi z) }[/math] is the derivative of [math]\displaystyle{ \ln (\sin (\pi z)) + C_0 }[/math]. Furthermore, if [math]\displaystyle{ \frac{df}{dz} = \frac{z}{z^2 - n^2} }[/math], then the function [math]\displaystyle{ f }[/math] such that the emerged series converges on some open and connected subset of [math]\displaystyle{ \mathbb{C} }[/math] is [math]\displaystyle{ f = \frac{1}{2}\ln \left(1 - \frac{z^2}{n^2}\right) + C_1 }[/math], which can be proved using the Weierstrass M-test. The interchange of the sum and derivative is justified by uniform convergence. It follows that
Exponentiating gives
Since [math]\displaystyle{ \lim_{z\to 0}\frac{\sin (\pi z)}{z} = \pi }[/math] and [math]\displaystyle{ \lim_{z\to 0}\prod_{n=1}^\infty \left(1 - \frac{z^2}{n^2}\right) = 1 }[/math], we have [math]\displaystyle{ e^C = \pi }[/math]. Hence
for some open and connected subset of [math]\displaystyle{ \mathbb{C} }[/math]. Let [math]\displaystyle{ a_{n}(z) = -\frac{z^2}{n^2} }[/math]. Since [math]\displaystyle{ \sum_{n=1}^\infty |a_{n}(z)| }[/math] converges uniformly on any closed disk, [math]\displaystyle{ \prod_{n=1}^\infty (1 + a_{n}(z)) }[/math] converges uniformly on any closed disk as well. It follows that the infinite product is holomorphic on [math]\displaystyle{ \mathbb{C} }[/math]. By the identity theorem, the infinite product for the sine is valid for all [math]\displaystyle{ z\in\mathbb C }[/math], which completes the proof. [math]\displaystyle{ \blacksquare }[/math] |
Usage of complex sine
sin(z) is found in the functional equation for the Gamma function,
- [math]\displaystyle{ \Gamma(s)\Gamma(1 - s) = {\pi\over\sin(\pi s)}, }[/math]
which in turn is found in the functional equation for the Riemann zeta-function,
- [math]\displaystyle{ \zeta(s) = 2(2\pi)^{s-1}\Gamma(1 - s)\sin\left(\frac{\pi}{2} s\right)\zeta(1 - s). }[/math]
As a holomorphic function, sin z is a 2D solution of Laplace's equation:
- [math]\displaystyle{ \Delta u(x_1, x_2) = 0. }[/math]
The complex sine function is also related to the level curves of pendulums.[7]
10.2. Complex graphs
 |
 |
 |
| real component | imaginary component | magnitude |
 |
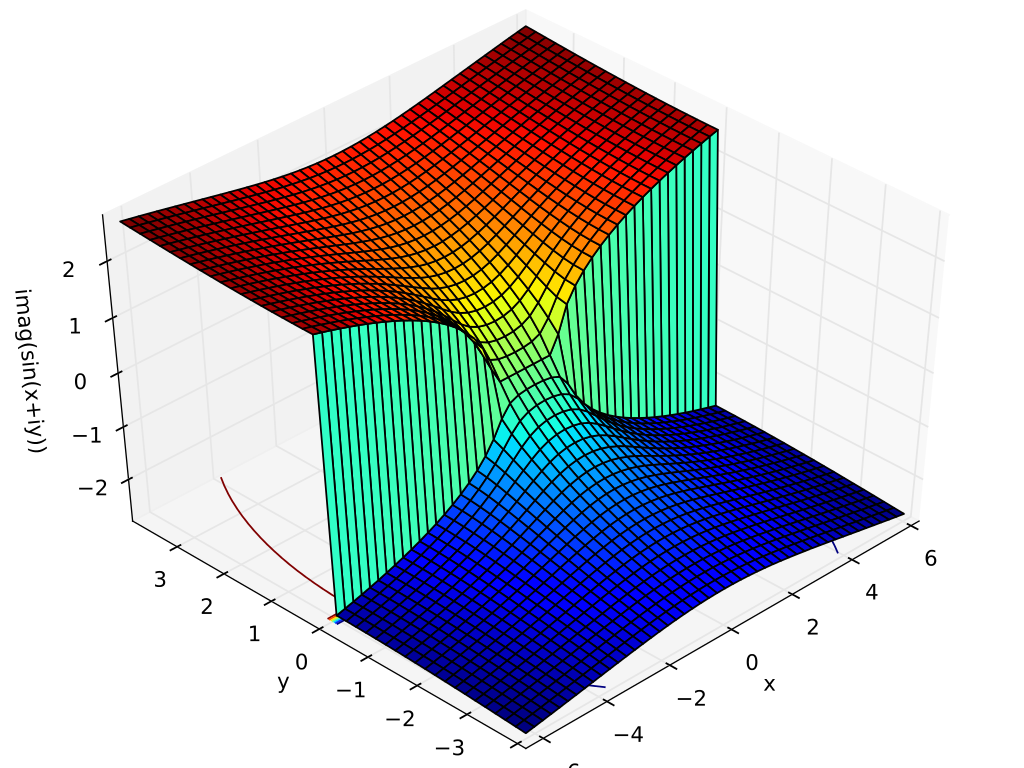 |
 |
| real component | imaginary component | magnitude |
11. History
While the early study of trigonometry can be traced to antiquity, the trigonometric functions as they are in use today were developed in the medieval period. The chord function was discovered by Hipparchus of Nicaea (180–125 BCE) and Ptolemy of Roman Egypt (90–165 CE). See in particular Ptolemy's table of chords.
The function of sine and versine (1 − cosine) can be traced to the jyā and koṭi-jyā functions used in Gupta period (320 to 550 CE) Indian astronomy (Aryabhatiya, Surya Siddhanta), via translation from Sanskrit to Arabic and then from Arabic to Latin.[8]
All six trigonometric functions in current use were known in Islamic mathematics by the 9th century, as was the law of sines, used in solving triangles.[9] With the exception of the sine (which was adopted from Indian mathematics), the other five modern trigonometric functions were discovered by Arabic mathematicians, including the cosine, tangent, cotangent, secant and cosecant.[9] Al-Khwārizmī (c. 780–850) produced tables of sines, cosines and tangents.[10][11] Muhammad ibn Jābir al-Harrānī al-Battānī (853–929) discovered the reciprocal functions of secant and cosecant, and produced the first table of cosecants for each degree from 1° to 90°.[11]
The first published use of the abbreviations 'sin', 'cos', and 'tan' is by the 16th century French mathematician Albert Girard; these were further promulgated by Euler (see below). The Opus palatinum de triangulis of Georg Joachim Rheticus, a student of Copernicus, was probably the first in Europe to define trigonometric functions directly in terms of right triangles instead of circles, with tables for all six trigonometric functions; this work was finished by Rheticus' student Valentin Otho in 1596.
In a paper published in 1682, Leibniz proved that sin x is not an algebraic function of x.[12] Roger Cotes computed the derivative of sine in his Harmonia Mensurarum (1722).[13] Leonhard Euler's Introductio in analysin infinitorum (1748) was mostly responsible for establishing the analytic treatment of trigonometric functions in Europe, also defining them as infinite series and presenting "Euler's formula", as well as the near-modern abbreviations sin., cos., tang., cot., sec., and cosec.[14]
Etymology
Etymologically, the word sine derives from the Sanskrit word for chord, jiva*(jya being its more popular synonym). This was transliterated in Arabic as jiba جيب, which however is meaningless in that language and abbreviated jb جب . Since Arabic is written without short vowels, "jb" was interpreted as the word jaib جيب, which means "bosom". When the Arabic texts were translated in the 12th century into Latin by Gerard of Cremona, he used the Latin equivalent for "bosom", sinus (which means "bosom" or "bay" or "fold").[15][16] Gerard was probably not the first scholar to use this translation; Robert of Chester appears to have preceded him and there is evidence of even earlier usage.[17] The English form sine was introduced in the 1590s.
12. Software Implementations
There is no standard algorithm for calculating sine. IEEE 754-2008, the most widely used standard for floating-point computation, does not address calculating trigonometric functions such as sine.[18] Algorithms for calculating sine may be balanced for such constraints as speed, accuracy, portability, or range of input values accepted. This can lead to different results for different algorithms, especially for special circumstances such as very large inputs, e.g. sin(1022).
A common programming optimization, used especially in 3D graphics, is to pre-calculate a table of sine values, for example one value per degree, then for values in-between pick the closest pre-calculated value, or linearly interpolate between the 2 closest values to approximate it. This allows results to be looked up from a table rather than being calculated in real time. With modern CPU architectures this method may offer no advantage.
The CORDIC algorithm is commonly used in scientific calculators.
The sine function, along with other trigonometric functions, is widely available across programming languages and platforms. In computing, it is typically abbreviated to sin.
Some CPU architectures have a built-in instruction for sine, including the Intel x87 FPUs since the 80387.
In programming languages, sin is typically either a built-in function or found within the language's standard math library.
For example, the C standard library defines sine functions within math.h: sin(double), sinf(float), and sinl(long double). The parameter of each is a floating point value, specifying the angle in radians. Each function returns the same data type as it accepts. Many other trigonometric functions are also defined in math.h, such as for cosine, arc sine, and hyperbolic sine (sinh).
Similarly, Python defines math.sin(x) within the built-in math module. Complex sine functions are also available within the cmath module, e.g. cmath.sin(z). CPython's math functions call the C math library, and use a double-precision floating-point format.
Turns based implementations
Some software libraries provide implementations of sine using the input angle in half-turns, a half-turn being an angle of 180 degrees or [math]\displaystyle{ \pi }[/math] radians. Representing angles in turns or half-turns has accuracy advantages and efficiency advantages in some cases.[19][20]
| Environment | Function name | Angle units |
|---|---|---|
| MATLAB | sinpi[19] |
half-turns |
| OpenCL | sinpi[21] |
half-turns |
| R | sinpi[20] |
half-turns |
| Julia | sinpi[22] |
half-turns |
| CUDA | sinpi[23] |
half-turns |
| ARM | sinpi[24] |
half-turns |
The accuracy advantage stems from the ability to perfectly represent key angles like full-turn, half-turn, and quarter-turn losslessly in binary floating-point or fixed-point. In contrast, representing [math]\displaystyle{ 2\pi }[/math], [math]\displaystyle{ \pi }[/math], and [math]\displaystyle{ \frac{\pi}{2} }[/math] in binary floating-point or binary scaled fixed-point always involves a loss of accuracy.
Turns also have an accuracy advantage and efficiency advantage for computing modulo to one period. Computing modulo 1 turn or modulo 2 half-turns can be losslessly and efficiently computed in both floating-point and fixed-point. For example, computing modulo 1 or modulo 2 for a binary point scaled fixed-point value requires only a bit shift or bitwise AND operation. In contrast, computing modulo [math]\displaystyle{ \frac{\pi}{2} }[/math] involves inaccuracies in representing [math]\displaystyle{ \frac{\pi}{2} }[/math].
For applications involving angle sensors, the sensor typically provides angle measurements in a form directly compatible with turns or half-turns. For example, an angle sensor may count from 0 to 4096 over one complete revolution.[25] If half-turns are used as the unit for angle, then the value provided by the sensor directly and losslessly maps to a fixed-point data type with 11 bits to the right of the binary point. In contrast, if radians are used as the unit for storing the angle, then the inaccuracies and cost of multiplying the raw sensor integer by an approximation to [math]\displaystyle{ \frac{\pi}{2048} }[/math] would be incurred.
The content is sourced from: https://handwiki.org/wiki/Sine
References
- "Sine, Cosine, Tangent". https://www.mathsisfun.com/sine-cosine-tangent.html.
- Weisstein, Eric W.. "Sine" (in en). https://mathworld.wolfram.com/Sine.html.
- "Sine-squared function". https://calculus.subwiki.org/wiki/Sine-squared_function#Identities.
- See Ahlfors, pages 43–44.
- Adlaj, Semjon (2012). "An Eloquent Formula for the Perimeter of an Ellipse". p. 1097. https://www.ams.org/notices/201208/rtx120801094p.pdf.
- https://functions.wolfram.com/EllipticIntegrals/EllipticE2/06/01/10/0009/
- "Why are the phase portrait of the simple plane pendulum and a domain coloring of sin(z) so similar?". https://math.stackexchange.com/q/220418.
- Uta C. Merzbach, Carl B. Boyer (2011), A History of Mathematics, Hoboken, N.J.: John Wiley & Sons, 3rd ed., p. 189.
- "Islamic Astronomy". Scientific American 254: 74. 1986. http://faculty.kfupm.edu.sa/PHYS/alshukri/PHYS215/Islamic_astronomy.htm. Retrieved 2010-07-13.
- Jacques Sesiano, "Islamic mathematics", p. 157, in Selin, Helaine; D'Ambrosio, Ubiratan, eds (2000). Mathematics Across Cultures: The History of Non-western Mathematics. Springer Science+Business Media. ISBN 978-1-4020-0260-1.
- "trigonometry". Encyclopedia Britannica. http://www.britannica.com/EBchecked/topic/605281/trigonometry.
- Nicolás Bourbaki (1994). Elements of the History of Mathematics. Springer. https://archive.org/details/elementsofhistor0000bour.
- "Why the sine has a simple derivative ", in Historical Notes for Calculus Teachers by V. Frederick Rickey http://www.math.usma.edu/people/rickey/hm/CalcNotes/Sine-Deriv.pdf
- See Merzbach, Boyer (2011).
- Eli Maor (1998), Trigonometric Delights, Princeton: Princeton University Press, p. 35-36.
- Victor J. Katz (2008), A History of Mathematics, Boston: Addison-Wesley, 3rd. ed., p. 253, sidebar 8.1. "Archived copy". http://deti-bilingual.com/wp-content/uploads/2014/06/3rd-Edition-Victor-J.-Katz-A-History-of-Mathematics-Pearson-2008.pdf.
- Smith, D.E. (1958), History of Mathematics, I, Dover, p. 202, ISBN 0-486-20429-4
- Grand Challenges of Informatics, Paul Zimmermann. September 20, 2006 – p. 14/31 "Archived copy". http://www.jaist.ac.jp/~bjorner/ae-is-budapest/talks/Sept20pm2_Zimmermann.pdf.
- "MATLAB Documentation sinpi https://www.mathworks.com/help/matlab/ref/double.sinpi.html
- "R Documentation sinpi https://www.rdocumentation.org/packages/base/versions/3.5.3/topics/Trig
- "OpenCL Documentation sinpi https://www.khronos.org/registry/OpenCL/sdk/1.0/docs/man/xhtml/sin.html
- "Julia Documentation sinpi http://www.jlhub.com/julia/manual/en/function/sinpi
- "CUDA Documentation sinpi https://docs.nvidia.com/cuda/cuda-math-api/group__CUDA__MATH__DOUBLE.html
- "ARM Documentation sinpi https://developer.arm.com/docs/100614/latest/b-opencl-built-in-functions/b2-math-functions
- "ALLEGRO Angle Sensor Datasheet https://www.allegromicro.com/en/Products/Magnetic-Linear-And-Angular-Position-Sensor-ICs/Angular-Position-Sensor-ICs/AAS33051.aspx