Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Communication establishment is crucial for rescue operations in disaster affected areas. A standard tool for communication is the use of cell phones. However, they can be useless in situations where the cellular network’s base stations are damaged in a disaster. A contemporary approach to re-establishing a communication network is by hosting base stations in drones.
- drone networks
- drone-based disaster recovery
- drone-based communication establishment
1. Introduction
The human race has always shown immense potential to manage and cope with natural disasters. As humans, we have developed various techniques to prevent and mitigate these life-threatening disasters. Setting up a communication infrastructure is widely discussed among such techniques, as normal means of communication might be devastated during disasters [1]. One of the most critical parts of disaster response is effective information exchange between information sources, emergency managers, and those impacted by the disaster event. During disaster events, the terrestrial communications infrastructure, such as mobile phone networks, TV networks, and radio networks, are frequently affected by the disaster impacts. This situation has a considerable impact on all preparedness, response, and recovery processes in disaster conditions [2]. Hence, there is always a need to maintain the entire disaster affected region under communication coverage throughout the rescue operations.
The communication between disaster management organizations, the general public, and other actors is a critical and fundamental factor in providing a quick and opportune response to all aspects of the disaster event. Many practical experiences show the importance of communication during a disaster [3].
One such case is the Pettimudi Landslide [4] that occurred in India on 6 August 2020. The disaster resulted in the snapping of communication lines and blockage of roads due to the uprooting of trees. This made it challenging for the local search groups to contact the base station. It was reported in the leading dailies that rescue groups had to stay near dead bodies for nearly three hours [5]. They needed to wait for other teams to arrive with a vehicle or wireless device before they were able to share messages. The rescue operations were effective only after the restoration of mobile towers.
Another case is the Sichuan Earthquake [6] that occurred in China on 12 May 2008. During the disaster, telecommunication systems were affected. The Chinese government activated the use of the national communications satellite network to recover communication services in all affected areas and support other solution implementations for different types of data exchange between the entities in charge of disaster management. The importance of communication during a disaster can be seen in other events as well. Recent examples include Typhoon Faxai in 2019 in Chiba, Japan [7] and bush fires of New South Wales in 2019–2020 [8]. In the former case, the damage mainly happened to the roofs of buildings, and prompt damage assessment was able to quickly facilitate disaster insurance relief. The latter case required aerial monitoring of areas in order to understand the status and severity of the bush fires.
Drones are increasingly becoming a viable alternative to conventional cellular infrastructure in disaster-struck regions thanks to their low cost and availability [9]. Their easy availability and low weight make them potential candidates as communication support in any terrain [10]. An example of such a communication network establishment is shown in Figure 1. Drones can easily be deployed to the affected region from one or more base stations, although performance in terms of flight time due to battery power restrictions, the number of drones required, and terrain constraints all remain matters of concern [11].
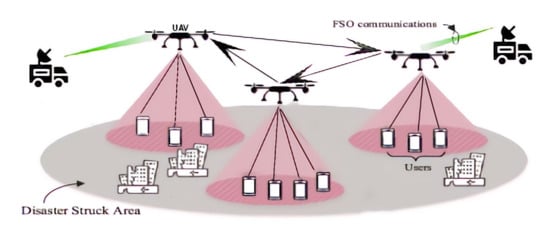
Figure 1. An example of a drone-based communication system.
2. The State-of-the-Art Work on Drone Network-Based Disaster Recovery
There have been trials in establishing communication in a post-disaster region. AT&T is an American telecommunication company that provides AT&T Network Disaster Recovery (NDR) [12] units that restore their network in a disaster area by bringing in portable cellphone towers on trucks called Cell on Wheels (COW) [13]. The NDR team was a great aid during the California wildfires (2017), Hurricane Irene (2011), Hurricane Irma (2017), and Hurricane Maria (2017) [14], although transporting the COW is difficult when roads are damaged due to disaster impact. Furthermore, COW is unsuitable for disasters such as floods, landslides etc.
Another method is the use of satellite phones or two-way radios as communication devices [15]; however, these devices are not affordable for the general public, and government regulations may prevent the general public from using these devices. In addition, it is not easy to track their locations.
Using drones for communication is a growing research field due to their on-demand deployment and high flexibility [16]. Park et al. [17] proposed a formation control algorithm for a drone-based network in a planar region. The algorithm increases the network throughput by improving the network infrastructure. Zhang et al. [18] proposed deployment algorithms for a drone network that maximize the leftover energy of all drones. The algorithm takes account of any no-fly-zone constraints in the operational region. Ruan et al. [19] proposed a multi-drone coverage deployment model that focuses on efficient network coverage and energy conservation. Pankaj Kumar et al. [20] provided a framework for a network that uses drones as a relay node to achieve good quality of service, better spectral efficiency, and improved diversity. Mozaffari et al. [21] proposed a novel framework for a drone-enabled antenna array system that provides better service to users. It considers each drone as an element in the antenna array system and optimizes the drone positions in the array to maximize the antenna gain and minimize the service time for the ground users. Namvar et al. [22] developed an algorithm for deploying a heterogeneous set of drones that provide maximum wireless coverage for ground users in a planar area.
There have been attempts to improve the performance and efficiency of drone-based networks. Thibbotuwawa et al. [23] derived the energy consumption of drones and determined the influence of various parameters that affect the energy of the drones. Theys and Schutter [24] provided experimental results on the relationship between various factors of a quadcopter. Sundaresan et al. [25] developed the designs of low-altitude drone networks that provide Long-Term Evolution (LTE) connectivity. Panda et al. [26] proposed a drone-based network that uses Wi-Fi as an emergency communication network for disaster management. Li et al. [27] proposed a deployment algorithm for drone-based networks that improves network throughput and coverage in the disaster area. Ishigami and Sugiyama [28] proposed a method to improve drone network throughput by controlling the drones’ height with respect to the number of users. Shakhatreh et al. [29] proposed an algorithm for drone deployment that minimizes the number of drones required for the network.
Lyu et al. [30] introduced a spiral algorithm that aims to minimize the number of base stations mounted on grounded vehicles. However, in situations where such vehicle access is limited, the technology is not applicable at all. A research paper by Plachy et al. [31] discussed the positioning of base stations in unmanned aerial vehicles. They developed an algorithm to find the optimal positions of the base stations through association of the Genetic Algorithm (GA) and Particle Swarm Optimization (PSO) evolutionary strategies. However, GA is computationally complex and PSO tends to fall into local optima. A paper by Ruzicka et al. [32] introduced a conditional generative adversarial neural network-based algorithm to optimize network coverage in similar situations. Their simulations showed that the algorithm converges to a quasi-optimal solution.
Recently, drone network-based disaster recovery has attained even wider acceptance. Furutani and Minami [33] discussed the various aspects of using drones for disaster risk mitigation and crisis response, especially in Japanese contexts. They explain the need for drones in disaster risk reduction, the different technologies applicable to this use case, and a variety of such cases in Japan. There have been studies focusing on the communication aspects as well; Chen and Cheng [34] proposed Reconfigurable Intelligent Surface (RIS) technology to support communications in post-disaster areas. In [35], the authors explained how a drone equipped with RIS can be used to cover users with an mmWave base station. An energy-aware multi-armed bandit algorithm is used to cover several high-capacity network hotspots while minimizing the energy consumption. In [36], the authors proposed the use of access and gateway drones to support communication over disaster-affected areas. An access drone collects information from its assigned area and flies to the nearby gateway drone to transfer the information. In order to avoid two access drones targeting the same gateway, the authors employ two multi-armed bandit-based algorithms, namely, the Kullback–Leibler upper confidence bound (KLUCB) and minimax optimal stochastic strategy (MOSS) algorithms. However, frequent flying can drain the energy of drones very quickly in this case.
This entry is adapted from the peer-reviewed paper 10.3390/computers11090139
This entry is offline, you can click here to edit this entry!