Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Electrical & Electronic
It is expected that more vehicles will be electrified in the coming years. This will require reliable access to charging infrastructure in society, and the charging will include data exchange between different actors. This suggests a variety of future charging strategies, charging patterns, system types, and charging infrastructures to match the specific vehicle- and user requirements. The electricity available for EV charging locally can be generated to the grid from fossil fuels, nuclear power, or renewable energy sources (RES), such as hydropower.
- charging infrastructure
- electric vehicles
- data
- autonomous electric vehicle
1. Introduction
There are more electric vehicles (EV) on the roads today, with a continuous charging need. It is expected that there will be a further significant increase in EVs on the roads, in the air, and on the water in the future, i.e., electric cars, trucks, aircraft, and boats. Thus, there is a trend toward the decarbonization of all modes of transportation [1]. This suggests a variety of future charging strategies, charging patterns, system types, and charging infrastructures to match the specific vehicle- and user requirements. The electricity available for EV charging locally can be generated to the grid from fossil fuels, nuclear power, or renewable energy sources (RES), such as hydropower. Intermittent RES can include e.g., solar [2], wind [3], or wave power [4]. The grids can be supported by battery energy storage (BES) for power balancing. In many countries, legislations, targets, or regulations to limit the amount of fossil fuels, internal combustion engine (ICE) vehicles, and pollutions will lead to a further enhancement of the amount of EVs in coming years [5], and installation of grid connected RES.
2. Conductive Charging
Today, charging with cables, i.e., conductive charging, is the most common charging strategy of EVs [24]. Conductive charging can occur at home or at other private or public charging stations. The opportunities of charging EVs at home, at work, or at a public facility, as well as utilizing a supplementary vehicle for some longer trips, were discussed in [25] for Seattle, based on GPS data. The charging stations for conductive charging EVs can be residential or non-residential, with fast or slow charging, with unidirectional power flow, or enabling a bidirectional power flow from the vehicle to the grid [7]. The AC or DC conductive charging can be classified in three different levels: Level 1, Level 2, and Level 3. In some cases, Level 3 is not included and denoted as DC charging instead. Level 1 is typically AC charging at low power levels; Level 2 is AC charging at slightly higher power levels; and Level 3, or DC fast charging (DCFC), includes higher power levels. The charging time is shorter with Level 3 charging and DCFC [7]. Slower charging is also known as destination charging, and fast charging is also called rapid charging [26]. A tool for modeling Level 3 charging stations was presented in [27]. The power level of DCFC could today be from around 50 kW, but the power levels could be increased in the future [28]. There is ongoing work on increasing the charging level to high-power charging (HPC) at about 350 kW to limit the charging time of a personal EV to about 15 min. This could, however, result in very high temperatures around the connector and safety issues [29]. Heavier vehicles could benefit from HPC. Charging at even higher power levels, around 400 kW, is known as extreme fast charging [28]. Thus, there are goals of reducing the charging time of EVs to be comparable to the refueling time of an ICE vehicle. This may lead to shorter battery lifetime [30]. Data on the battery system of the vehicle include, for example, weight, energy density, volume, degradation and the time it takes to charge, costs, and safety [31]. Data that could inform the EV driver of the charging time and driving range of (i.e., fast charging speed) are estimated in km/min [30]. On-board charging means that the charging system with a converter, etc., is mainly included inside the vehicle itself, whereas off-board charging means that the charging system with a converter, etc., is mainly inside the charging station [32]. AC charging is on-board charging and DC charging is off-board charging. The power electronic converters are discussed in [31]. Information on weight, size and space is more relevant for on-board charging, as the EV will include more equipment, whereas costs of the system are relevant for both on-board and off-board charging [33]. The on-board charging is more commonly used for slower charging rates, whereas faster charging can be done with off-board charging [24]. For AC charging, one single phase or all three of the phases could be used [26]. There are national and international standards to follow when charging an EV, affecting the design of the ports and connectors [7]. There are several strategies for battery charging proposed in different charging protocols, such as constant current constant voltage (CC-CV) [34]. As described in [35], in USA, EU, and Asia, the chargers used are for example of the types Tesla, J1772, GB/T, Mennekes, and CHAdeMO, an abbreviation for Charge de Move [26].
It has been highlighted that an inconvenience in charging, due to a lack of Level 2 chargers at home, can contribute to the discontinuation of using EVs [36]. The placement of charging stations for conductive charging was discussed in [37], where information that could be used to optimize placement was, for example, the number of EVs charged, energy delivered to the EVs, infrastructure cost, distance to a charging station, degree of utilization of the chargers, and waiting time at charging stations. Cloud-based systems have been proposed for EV charging, to handle large amounts of data [38]. In [38], their framework included data on SOC to describe the state of the battery, locations, energy of the charging, data on climate and on vehicle properties. Vehicle-to-cloud models have been proposed [39]. Charging clouds were used for data on the battery cell level in [40], including information on current, voltage, temperature and time. As highlighted in [41], apart from SOC, input data for the modeling of EVs generally include weather (e.g., temperature), travelling (time of the travel and estimated daily distance travelled, from either real data from GPS, data from travel surveys, or estimated patterns), date (time of the day, day of the week and season), and economy (e.g., gross domestic product and electricity prices). An overview of datasets available for studying charging of EVs was recently presented in [41]. Real datasets of residential charging of EVs for apartment buildings in Norway were presented in [42,43], with data on the energy use for garages with hourly resolution if an increasing number of EVs are charged there. It is noted that the EV charging times vary with personal access to a parking spot with a charging system [42]. It has been proposed that data could be simulated to emulate the charging of EVs, if real-world data are hard to receive [44], including data on the arrival of EVs, departure time, and need of charging. Additionally, although the number of EVs is increasing globally, there are not so many EVs in all cities where there are available larger data sets on the charging of similar EVs [45].
3. Controlled Charging
When the charging typically occurs, i.e., the charging profile, it varies with the season, time of the day, location, and if it is a workday or holiday [46]. How EVs are charged was the topic of [47], analyzing the travel data along with theories from behavioral economics. The charging demand can be estimated based on electricity price, patterns in driving, SOC values, where the charging station is located, charging time, type of charging, amount of people charging there, and the overall experience of the costumer [48]. To better understand to what extent different EV charging behaviors could affect the grid, increasing the peak-demand, non-preferred voltage levels, and system losses, a model and analysis for EV charging, with a case study of EVs in the UK, was presented in [49]. The charging of EVs can be coordinated to limit the load on the grid at certain times. The control or management of charging is known as smart charging, including the concept of V1G, where the (unidirectional) charging of the vehicle is coordinated in time, and vehicle-to-grid (V2G) with the coordination of bidirectional power flows between the vehicles and the grid, which is considered more complicated to implement [50]. The EV can be discharged to other systems as well, through vehicle-to-everything (V2X), vehicle-to-home (V2H), or vehicle-to-vehicle (V2V), and an overview is shown in Figure 3. EV owners can prefer to charge when the electricity price is low. A dynamic electricity price can enhance charging at certain times, to balance and coordinate charging from a grid perspective [51]. An EV aggregator is an actor between the grid owners and EV owners and could be useful for the implementation of smart charging or V2G, where the EV can both charge and discharge power to the grid. The aggregators would be part of coordinating V2G to ensure that it is beneficial for all actors [52]. As highlighted in [51], the data exchange between the EV and the aggregator could include SOC, charging time, battery capacity and location of the vehicle. The opportunity of utilizing V2G for a fleet of EVs was described in [53], utilizing DC-to-AC converters inside the EVs. An aggregator planned charging and discharging of the EV fleet to ensure the low cost of electricity, and the regulation of voltage and frequency, as well as not significantly decreasing the battery lifetime. The data used were current- and final SOC value, time of arrival and departure, cost of electricity, power availability and the preferred power regulation for the grid [53]. Some positive aspects with V2G are to support grid stability, power quality, good power factor, frequency regulation, reduce costs and limit voltage fluctuations [54]. Carbon emissions may be reduced by smart charging [55,56], and generally, purchasing a new EV rather than a new ICE vehicle may, in many countries, lead to lower life cycle emissions [57]. The control of EV charging could be designed to ensure a long lifetime of the technical systems, such as ensuring a long lifetime of the transformer connected to the grid [58]. Some downsides with V2G are that there could be additional wear of the batteries, higher costs, and limited access to stations equipped and adapted for V2G [52]. The willingness of the vehicle owners and grid operators to use their EVs for smart charging or V2G can vary.
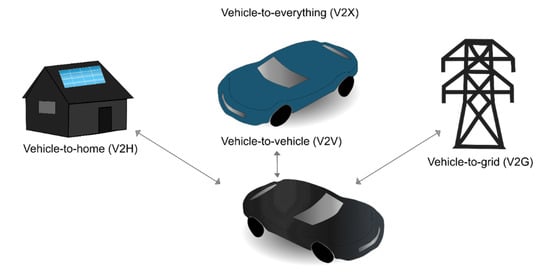
Figure 3. Sketch of concepts of V2X, with bidirectional power flow from the vehicle.
4. Wireless Charging and Dynamic Charging
The wireless charging of EVs, i.e., wireless power transfer (WPT), has been proposed as an alternative to cable charging. The EV can be charged wirelessly during the drive (dynamic charging) or when it stands still (static charging) [59]. Inductive wireless charging does not require a physical connection between the vehicle and the grid [33]. Bidirectional power flow is not relevant for WPT yet [7]. As described in [59], data sharing between the vehicle assembly (i.e., the system for wireless charging on the vehicle) and the ground assembly (i.e., the system in the road) is done through communication links, and the information necessary is e.g., SOC-value, and power level for charging. Other data transferred between systems are the detection of the vehicle and request, as well as the approval or denial of charging and ensuring that the vehicle is at the right position throughout the charging. If the charging is dynamic, the speed of the vehicle should be within a certain limit, and there may be additional vehicles on the road. The ground assembly must ensure that no other objects are on the charging area, i.e., ensure foreign object detection (FOD), including both people, animals, and objects, to ensure that no one will be harmed. Finally, the payment should be done. The charging of many vehicles with wireless charging was discussed in [60], proposing a system that would limit the need for transformers. Data suggested for dynamic charging are presented in Figure 4, and could include the arrival and departure time of EVs and unplanned or planned charging based on the historic data of driving [7], as well as the following: when and where to charge and when the charging should start and stop, when the connection is done, the cost of electricity in real time but also as expected in the future, potential cheaper prices at certain times, grid load, time of day, charging rate and power level, scheduling and location of the EVs to be charged, location of the charging stations, traffic on the roads to different charging stations and road conditions.
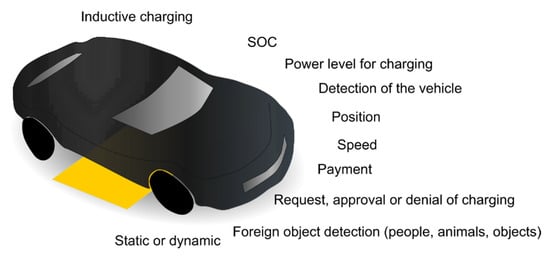
Figure 4. Sketch of some of the useful data during static or dynamic inductive charging.
There can be both inductive and conductive charging in the road for dynamic charging. Electric road systems (ERS) include inductive charging, power tracks in the road, and charging from overhead power lines, enabling dynamic charging. Thus, the dynamic wireless charging (DWC) can include a power track in the road to charge while the EV is driving over the power track [61]. The potential benefits with such a system could be a longer range of driving, a potential cost reduction, and improved use of the batteries. However, the too-small batteries for EVs with DW may have a shorter lifetime and be degraded, which could increase battery costs in the longer perspective, as discussed in [61], and there are the costs of installing and maintaining the power tracks.
5. Battery Swapping
Battery swapping could be a solution for fleets of electrified taxi cabs, where the discharged battery would just quickly be swapped to a fully charged one at a specific battery swapping station (BSS) [62]. The information includes the EV position in the station, info on requiring a new battery, how to dismount and mount batteries properly [63], the battery model and number of swaps per day at a station [64]. The possible locations of BSSs were analyzed in [64]. Battery swap could be an alternative to ensure a fully charged EV, with the benefit that it could take less time than cable charging. In [65], the infrastructure for EV charging is divided in three different categories; distributed infrastructure (i.e., small charging systems, at home or by the office, connected to the grid utilizing transmission lines, but adding on systems and functionality for V2G), fast charging infrastructure (i.e., with charging stations with use of high power rates from grid, but no functionality for V2G), and battery swapping infrastructure (i.e., battery swapping stations with many charged batteries and opportunity to recharge the battery at a central station). The consumers view on battery swap technology (BST), with regards to risks and usefulness, affect how much it will be implemented in the future [63].
6. Mobile Charging
In large cities, fixed charging piles may be expensive to install due to the high costs of land; the EV driver could spend a lot of time at charging stations, and parking places with charging piles could be hard to find due to the large amount of traffic. In such circumstances, mobile charging could be an interesting option for the driver [66]. Mobile charging or portable charging includes charging stations that can change its location. As described in [66], the mobile charging piles, including a van with battery to charge from, could be called to a specific EV for charging with the use of an app in a smartphone, and the payment of the charging, including a fee for the service, would be made afterwards using the phone. In [67], the problem of the high interest of EV drivers to charge during specific hours and demand on the power grid at these times was solved by including extra portable charging stations (PCS). The vehicles can be charged by mobile robots in a garage, where the charger moves to the car that needs charging, either with a conductor or with inductive charging [68]. A mobile robot charger with energy storage and conductor in a parking area was proposed in [69], discussing that the cost of installing fixed charging piles at parking spaces could be reduced. Data in the model of charging robots in [69] included information of the size, overall outline and number of parking lots of the parking area, data on when the vehicles arrive and leave, how many of the vehicles that are EVs, EV charging requests, battery information, which parking lot the EV is placed on, when the vehicle should be done with its charging, and the EVs will be put in a line to fulfill the charging demand of several EVs. To communicate between EVs and chargers, internet-of-vehicle (IoV) was suggested in [70] for mobile charging solutions with data on charging stations and number of plugs, waiting time, cost of charging, GPS data on roads and traffic jams, data on EVs and charging need, budget for charging, etc.
Mobile charging stations were outlined in a recent review paper [71], dividing different charging strategies in the three main categories: mobile charging (including the subcategories: portable charging station, truck mobile charging stations and vehicle-to-vehicle (V2V) power transfer), fixed charging (private and public charging stations) and contact-less charging (battery swapping and wireless road charging). Data from the driver for mobile charging include the suggested location for the charging event, electricity need, and time to charge, and after a correct charging, the driver will receive information on total cost of the charging [71]. Some benefits of utilizing a mobile charging strategy are that it does not require building more new fixed charging stations with secure access to an electric grid, or new costly infrastructure, and the system could be charged during the times that are beneficial for the grid [71]. In general, mobile charging could become a complement, enable flexible charging, reduce traffic jams, and become a support to fixed charging stations during times with high demands. V2V charging was analyzed in [72], discussing that data are required from the driver in need of charging (consumers) to the driver who offers charging and sells it to the other vehicle (providers), and that vehicular ad-hod networks (VANETs) could be used for data-sharing between the vehicles.
This entry is adapted from the peer-reviewed paper 10.3390/wevj13080139
This entry is offline, you can click here to edit this entry!