3. Review of Numerical Studies of VIM
Comparing with experimental work, numerical studies on VIM are very limited. This section reviews selected numerical simulation work including computational fluid mechanics (CFD) work related to FOWT and VIM.
3.1. Numerical Simulation of FOWT
To study the VIM of spar and mono-column type floating production storage and offloading, a wake oscillator model was proposed by [
77], and results were compared with experiments from [
75,
76].
There exist some notable general numerical studies on spar-type FOWTs [
4,
64,
105,
106,
107,
108].
A linearized aero-hydro-servo-elastic floating wind turbine model was presented and used to perform integrated design optimization of the platform, tower, mooring system, and blade-pitch controller for a 10 MW spar floating wind turbine [
106,
107].
The influence of vortex-induced loads on a spar-type FOWT was investigated in [
105] using a coupled aero-hydro-vortex-mooring numerical model, and the vortex-induced loads are simulated by a CFD approach. It was concluded that the sway and roll motions were dominated by the lift force induced by the vortex shedding. The coupling of different responses and non-linearities of the stiffness was also observed. Ref. [
4] investigated the effect of wave–current–structure interaction on a moored 6MW spar-type FOWT. Regular waves and uniform current were considered, while wind loads were not considered.
Mooring lines are one of the key elements of FOWTs. Digital twins were developed to detect the long-term drift and near-future axial tension of mooring lines to predict the extreme loads and fatigue [
108]. The dynamic response of a fully non-linear model of a DeepCWind FOWT was investigated [
109] after one of its three-catenary mooring systems was broken. It was suggested that the tension change was closely related to the drift motion, necessitating an increase in the minimum breaking load (MBL) of the mooring line components.
A spar-type FOWT with a conventional three-line mooring system in catenary configuration was studied by [
110] using RIFLEX [
111], and it included the non-linear restoring force–offset relationship (restoring stiffness). Such non-linear stiffness has been further confirmed in the data analysis of Hywind Scotland field measurements [
17], resulting in a large variation of natural frequency ratio between IL and CF, which needs to be considered in the VIM analysis.
Along with the collaboration between Equinor and SINTEF on the topic ‘Large floating wind turbines’, SINTEF Ocean carried out relevant numerical studies on the VIM of a FOWT. A case study of a spar-type FOWT using three different analysis methods was carried out [
64]:
Load coefficients established for the VIV of slender structures have been used in the analyses. The focus was on the qualitative characteristics of the predicted response and on what is included in the different types of analyses values. The time domain VIV load model has advantages of handling non-linearities and time-varying flow, it is therefore a promising analysis method for VIM predictions. The hydrodynamic coefficients may be influenced by the high Reynolds numbers and small aspect ratios of FOWTs, which need further investigation.
3.2. Application of CFD on VIM Study
CFD has been used as an important tool for studying the vortex-induced motion of offshore floating structures since the early 2000s, with a major focus on the spar concept. Early studies also investigated the VIM of straked cylinders given the similarities between straked cylinder and spar platforms [
112]. Later on, there have been a good number of publications that used CFD to simulate the VIM of spar, to name a few [
113,
114,
115,
116]. Most of these works have focused on exploring the capabilities of CFD to predict VIM and validate against model tests. A variety of CFD methods have been considered, including Reynolds averaged Navier–Stokes (RANS) equations and Detached Eddy Simulations (DES).
Overall speaking, due to the limitations of computational power, the above-mentioned work could not achieve very high grid resolution. Seeing from today’s standard, one may question the mesh resolution in these studies. However, in most of these papers, a mesh convergence study was presented, giving additional confidence in the results presented therein. Regardless, these early studies already demonstrated that CFD can predict the vortex-induced motion of a spar with satisfactory agreement with model tests. In addition, there are several important conclusions that can be instructive even for CFD studies today:
-
Details of the structure matter. It is practical to ignore some details simply because they may introduce unnecessarily additional work without bringing in equivalent gain, but this must be undertaken with caution. This has been discussed in the above-mentioned papers, and it turned out that by including or excluding some appurtenances on a spar installation, predictions can deviate a lot, and this is confirmed by several model tests [
30,
50,
95]. Yet, choices must be made due to the compromises between cost and accuracy.
-
Flow direction matters. This is straightforward, because when a spar is fully appended with strakes, chains, and pipes, the current from different directions will induce different levels of VIM.
-
Each design is different, and special considerations are needed even with a commonly accepted practice. For example, as [
116] has observed, whether or not flow separation is happening on the spar hull will rather strongly impact the final prediction.
In 2013, a CFD guideline for spar VIM was proposed by [
117], in which different CFD approaches have been reviewed, and some were tested. Numerical details have been discussed in this paper, including choice of turbulence model, grid resolution, time step size and method for handling dynamic motion. This guideline places a solid common practice to increase the reliability of CFD results on spar VIM.
When it comes to more recent research, there is a clear tendency that more work starts to investigate semi-submersibles [
118,
119,
120,
121]. In [
121], the authors made a quite comprehensive review on this topic, so the work mentioned therein is not repeated here.
Compared to spar, semi-submersibles raise different challenges, amongst which the most critical one is that as the structure becomes more complex, wake interactions among different columns play a more important role. This means that the wake has to be properly resolved in addition to the boundary layers and near-structure flow regions. In other words, the application of CFD on semi-submersibles is more expensive. On the other hand, there are more design parameters for a semi-submersible than for a spar platform, where CFD can contribute to the early design stage where the number, size, shape and arrangement of columns together may easily result in a massive parameter matrix. Multiple promising designs may need predictions from CFD rather than theoretical estimations, and the above-mentioned CFD studies demonstrated CFD’s strength in comparing the VIM performances of semi-submersibles under different column arrangements.
The Reproducible Offshore CFD JIP was initiated for developing and verifying a CFD modeling practice for several typical offshore applications [
122,
123,
124], and SINTEF Ocean joined some work packages. One work package was about semi-submersible VIM [
123]. Model tests on squared column semi-submersible were used for benchmarking the CFD models. Generally, the comparison between CFD simulations and model tests was good; however, the yaw responses were over-predicted at higher reduced velocities.
CFD simulation of a multi-mono-column platform FOWT (OC4) was carried out by using OpenFOAM [
125]. A range of reduced velocities was investigated. By comparing the results from current only and collinear wave and current cases, it was observed that the given incident waves (collinear as current) mitigate VIM responses for a wide range of reduced velocities. This finding is useful, and it is of interest to investigate the interaction of incident waves and currents on VIM.
Summary of Application of CFD on VIM Study
-
Using CFD for VIM has been shown to be a promising approach both for spars and semi-submersibles. The comparisons presented above give confidence to the further application of CFD in the design phase, especially when the screening of preliminary designs is finished, and some promising candidates stand out. In this stage, running CFD simulations of these candidates will give more reliable force and VIM predictions than more simplified numerical tools, while also being a lot cheaper/faster compared to model tests.
-
High-quality model test measurements form a solid basis to validate CFD modeling, providing the possibility to make a very detailed comparison and quality control.
-
CFD provides flexibility to extract detailed forces/loads on segments, separated columns, and even some small structural details. This can be important for optimizations. Emphasis can also be put to access the pressure and wall shear stress plots on the structure, so instructive information is more easily extracted from CFD simulations for designers to identify where improvements can potentially be made.
-
Detailed flow visualizations, especially in the wake, are accessible in CFD. This may be especially interesting for semi-submersibles. With the intuitive and detailed flow visualizations, physical insight in the fluid/vortex dynamics could be improved.
4. Review of Field Measurements of FOWTs
High-quality, high-resolution field measurements are essential to either check the ‘scaling effects’ of laboratory tests or validate numerical simulations. For FOWTs, the following measurements are usually made.
The VIM of a prototype Deep Draft Semi-submersible
® (SBM Atlanta) with four square columns was reported and compared with model tests in [
67]. GPS measurements provided the motion of the prototype Semi under current conditions. The measured mean radial offset ranges from 0.2D to 0.6D, and the lock-in region is centered around 0.35D, while the maximum measured Y-direction amplitude was around 0.2D. There was no sea-state information available based on platform measurements. It was assumed that the sea state was less than 6 ft for the presented data time frame based on observations at nearby oceanographic buoys. A key observation from the comparison indicated that the VIM motion from model tests was significantly less than from the field measurements.
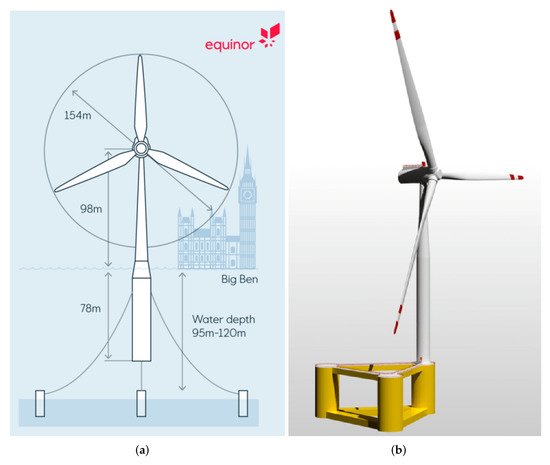
‘The Hywind Demo is a demonstration system that was installed and commissioned in Norway in 2009; it was the world’s first full-scale floating offshore wind turbine. The installed capacity of the demo system is 2.3 MW. The demo unit is located 10 km west of the island of Karmøy off the Norwegian west coast. The water depth is 220 m’
[
127]. Field data of ‘Hywind Demo’ were provided by Equinor (earlier Statoil). The field measurements were used to validate numerical tools [
126,
127].
In [
126], numerical simulations by use of the SIMA analysis tool were carried out and compared to field measurements. Comparative dynamic simulations were carried out with the estimated wave elevation time series as input together with measured and further refined statistical parameters of the wind field. VIM was not considered in the study. Overall, good agreement was seen between the measured and simulated responses, which built confidence to further develop the proposed analysis tool.
In [
127], a FAST model developed by NREL was validated against the field measurement of ‘Hywind Demo’. Measured wind speeds and wave spectra were used to develop the wind and wave conditions used in the model. The overall system performance and behavior were validated for eight sets of field measurements that span a wide range of operating conditions.
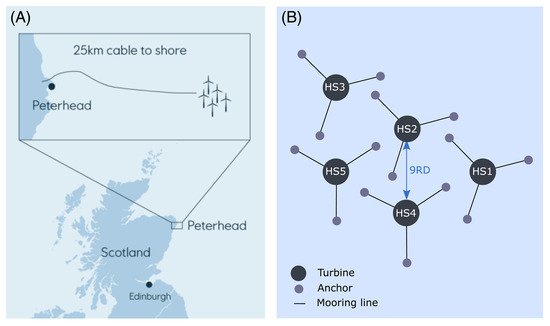
The Hywind Scotland wind park is located about 25 km east of Peterhead in Scotland at water depths in the range of 95–120 m, as illustrated in
Figure 12A. The wind farm consists of five floating units, each equipped with a 6 MW wind turbine. The turbines are installed in two rows with a distance between each neighboring turbine of 9 rotor diameters (RDs), as shown in
Figure 12B [
128].
Figure 12. (
A) The Hywind Scotland wind park is located 25 km east of Peterhead in Scotland. (
B) Layout of the wind park consisting of five turbines labeled HS1 to HS5. A blue arrow marks the distance of 9 rotor diameters (RDs) between the turbines [
128].
Measurements of floater responses from the Hywind Scotland wind farm both for turbines in free wind and in wake and for different atmospheric stability conditions were presented in [
128]. Generally, the floater motions were small for all wind speeds, showing that the design performs satisfactorily in both free wind and wake conditions.
The VIM of Hywind Scotland FOWT was investigated in [
17]. The field measurement data were analyzed and compared with time domain VIV analysis, focusing on the floating unit HS4. Data analysis of field measurements on HS4 was carried out, focusing on the VIM responses and mooring line tension. Key response characteristics such as amplitude and frequency under various environmental loads were investigated and presented. Non-linear time-domain simulation was carried out by using VIVANA-TD. Furthermore, the predicted VIM responses and mooring line tension force were compared with field measurements.