Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Transportation Science & Technology
Congestion is an ongoing problem for many urban centres worldwide, leading to excessive delays, noise and air pollution, frustrated drivers, and high energy consumption. The carbon footprint of conventional transport systems can be high as a result and transport is among the highest contributors of greenhouse gas emissions. Therefore, with the growing interest in developing connected fully autonomous vehicles (ConFAVs), there is a pressing need to consider their effects within the congested urban setting.
- connected autonomous vehicles
- sustainable transportation
- traffic congestion
1. Introduction
Rapid urbanisation of many large cities around the world has led to a sharp increase in heavy vehicle congestion. Traffic congestion is known to degrade ambient air quality and increase noise pollution, collisions, and driver frustration [1,2]. London, being the largest city in the UK and among the most populated urban city centres of the world (this estimate does not include the thousands that travel from the suburbs to the capital for work daily), suffers from the worst traffic congestion in the UK, and is among the worst in Europe [3]. The Congestion Charge was introduced to specific areas within the centre of London with the aim to reduce congestion and ensuing greenhouse gas emissions. There is now an ultra-low emission zone (ULEZ) charge in operation in central and outer London aimed at reducing nitrogen dioxide by around 30% across London [4].
Connected fully autonomous vehicles (ConFAVs) have the potential to increase road capacity using vehicle platooning [5], with a lower impact on land occupancy due to a reduced demand in available parking spaces, while allowing basic access to transport for individuals who are unable to drive and promoting equity among the able-bodied and disabled users. However, many public opinion surveys have been undertaken worldwide about the use of autonomous and self-driving vehicles, and the results have shown common concerns that lead to public hesitance towards the technology. Some common concerns included software misuse/hacking, data privacy, inclement weather, interacting with conventional vehicles, interaction with vulnerable road users (i.e., pedestrians and cyclists), user safety, affordability, equipment failure, legal liability of owners, and allowing their child to ride in the car by themselves [6,7,8,9,10,11,12]. Studies have shown that it may be difficult for passengers to tell the difference between the vehicle driving autonomously and them being driven by a human [13],
Using vehicle-to-vehicle communication, ConFAVs on similar route trajectories can travel together in a platoon to increase efficiency. Research has defined a vehicle platoon as a group of connected automated vehicles (CAVs) traveling together at a consensual speed, following the leading vehicle while maintaining a predetermined inter-vehicle distance [14]. Platooning is considered to contribute to the improvement of mobility, fuel consumption, travel time, and traffic safety. The concept has been tested in a series of real-world trials [15,16] funded by government bodies and private firms, to study the strategies and technologies for platooning vehicles on un-modified public highways [17,18].
1.1. The Definition of Traffic Congestion
Researchers have over the years published different definitions of traffic congestion, with the most common being defined as a traffic state impacted by traffic flow parameters—such as volume, speed, and density—or as a phenomenon of lost time caused by slow moving vehicles. Another theory looks at the relationship between traffic supply and demand, where traffic congestion develops when the traffic demand exceeds the amount of traffic that the road can supply (capacity) [19]. The term ‘congestion’ is therefore defined in the context of this research as the state of traffic impacted by lost time (delay) caused by slow-moving vehicles.
1.2. Maximising Transportation Resources Using Intelligent Transport Systems
Jiehao Sun et al. (2021) analysed the control and management of urban traffic congestion, proposing countermeasures and solutions to alleviate traffic congestion by breaking down six specific ways in which urban congestion could be optimised. These are listed in Table 1 [19]. Their research argues that one way to optimise conditions to reduce congestion is “vigorously” developing intelligent transportation systems to make use of and improve the existing road resources.
Table 1. Specific measures to optimise urban congestion by Jiehao Sun et al. (2021) [19].

Intelligent Transport Systems or ‘ITS’—as described by the European Commission’s Directive 2010/40/EU in Figure 1 [20]—could play a significant role in reducing some negative effects of transport and potentially become a major contributor for fulfilling the European Union’s aim of a ‘sustainable and well-functioning’ transport sector increasing safety while tackling Europe’s growing emission and congestion problems [21,22].
Figure 1. Proportion of net greenhouse gas emissions in each end user sector, UK 2020 [20].
1.3. The Impact of the Transportation Sector on Greenhouse Gas Emissions
According to statistics published by the Department of Business, Energy & Industrial Strategy, the transportation sector was responsible for around 28% of UK greenhouse gas end-user emissions in 2020—mostly by measuring carbon dioxide emissions [23]. This national figure is measured only by vehicles used in road transport, domestic aviation, railways, and domestic shipping; emissions from transport related infrastructure, air conditioning, international aviation and shipping emissions are not accounted for. Figure 2 shows how the transport sector compares against others.
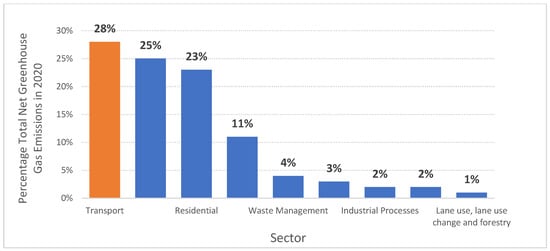
Figure 2. Proportion of net greenhouse gas emissions in each end user sector (adopted from UK Department for Business, Energy & Industrial Strategy [23]).
It should be noted that carbon dioxide emissions measured in the statistics above for the transportation sector were closely related to the amount of fuel used, whilst nitrous oxide and methane emissions were influenced more by the age and type of vehicle [23]. Research shows that drivers go through a variety of driving cycles during congested conditions, which leads to extra fuel consumption [24].
2. The Presence of Autonomous Vehicle Technology
The public has already accepted the technology in some controlled environments, as driverless trains have been operating in some parts of the world for decades, such examples include Paris, Copenhagen, London, and Barcelona. London’s automated lines—which include the Victoria, Central, Jubilee, and Northern Lines—have been in operation from as far back as 1968. However, they continue to have drivers in the front carriages, to open/close the doors and occasionally control the speed of the train. The Docklands Light Railway (DLR), which is currently operating in East London, is fully automated and has operated without a driver sitting at the helm. In DLR trains, there is only an agent on board to attend to passengers. Furthermore, in London, driverless trains operate at Heathrow, Gatwick, and Stanstead airports. In 2011, the Heathrow Airport in London launched the first commercial application of an Urban Light Transport (ULTra) system, which introduced driverless pods on a 4 km guideway that shuttled passengers between a car park and Terminal 5 [27].
It should be noted that other autonomous vehicle (AV) technology has already been operational in other areas of the transport industry for decades. For example, airplanes have been equipped with computer assisted flight systems to automate flying and landing from as early as 1912 and 1948 respectively (Rao, 1993). In 2018, there were 64 fully automated metro lines in 42 cities, operating at a combined 1026 km. Figure 3 below shows how the 1026 km of operating lines are divided among the world regions. In the UK, the Docklands Light Railway (DLR)—which operates throughout East London—has been fully automated since its inception in 1987 with a passenger service agent on onboard to take over, if necessary, as well as to ensure safe boarding and attend to passengers.
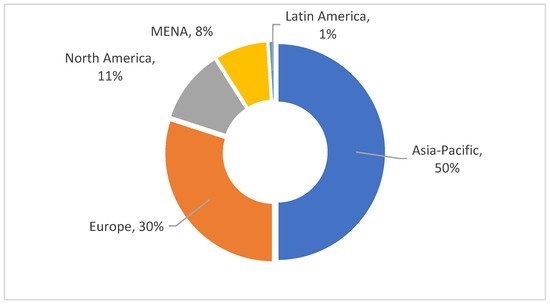
Figure 3. Percentage of auto lines [28].
3. State of the Art of ConFAVs
The past 30 years have seen major strides in the successful implementations of intelligent transportation systems (ITSs). Connected vehicles collect data about their surroundings and use this information to support the driver in their operation. This has been accomplished through the use of strategically placed sensors both on-board (on-board units: OBU) and along the sides of the road (roadside units: RSU), using vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), infrastructure-to-vehicle (I2V), and inter-infrastructure (I2I) communication technology [29]. The data collection is facilitated through the use of dedicated short-range wireless communication (DSRC), which forms vehicular ad-hoc networks (VANETs) that allow vehicles to exchange information about road conditions and their trajectories [30,31].
Currently, the connected vehicle uses radar and vision sensors to warn drivers of a range of hazards, alerting them to sudden braking ahead, collision paths, deviations toward the road edge, sharp curves, slippery patches, lane closures, and risks of overturning. When hazards are detected, these systems activate mitigation mechanisms in order to counteract the problem. This is carried out in a variety of ways from warning messages sent to the driver to the automatic correction of vehicular operations (for example: automatic braking or lane correction) in the more autonomous vehicle.
4. Examples of Autonomous Vehicle and Vehicle Technology Trials in Europe
In the United Kingdom, an autonomous Nissan LEAF was successfully introduced to the streets of Europe for the first time in February 2017 during their piloted test drive in London [32,33,34,35,36]. According to a January 2017 publication by Ashley Coates in The Independent, the new Nissan LEAF and Qashqai models are to be equipped with systems enabling single-lane autonomous driving on motorways.
Humandrive, the UK government-backed project had set out to test an autonomous 100% electric Nissan LEAF equipped with GPS, radar, LIDAR (laser scanners) and camera technologies within the UK. The autonomous system was capable of making decisions to navigate roads and obstacles, to change lanes, to merge with traffic, and to come to a stop or move off at the appropriate time while traversing a roundabout or signal-controlled junction. The findings of this 230-mile autonomous journey, undertaken in November of 2019 with two test engineers on board, have ranked the UK as one of the best locations worldwide to develop and deploy connected autonomous vehicle technology [37].
The elite technology and innovation centre established and overseen by Innovate UK [38] Transport Systems Catapult (TS Catapult), in partnership with the Mobile Robotics Group (MRG) at the Oxford University, has been leading the research into the development of self-driven pods [39]. As briefly mentioned before, the centre modelled a two-seater autonomous vehicle which has been fitted with stereo cameras, LIDAR (light detection and ranging system) and radar-based obstacle detectors. The vehicle would continue to have a steering wheel, accelerator, and brake pedal until testing is complete.
The Swedish car company Volvo entered a joint engineering venture with Uber in 2016 to produce a self-driving system with full automation [40]. The Volvo XC90 was equipped with Uber’s autonomous system, which features numerous back up system for steering, braking, and battery power, designed to bring the vehicle to a halt in the case of an emergency. Volvo Trucks also developed a connected electric autonomous vehicle called “Vera”, aimed to transport goods between a logistics centre to a port terminal in Gothenburg, Sweden. This experiment resulted from a partnership between Volvo Trucks and the ferry and logistics company, DFDS. The joint venture aimed to design a repetitive and continuous flow operating under 40 kph (25 mph) that is responsive to demands, while maintaining maximum efficiency, flexibility, and sustainability.
5. Autonomous Vehicle Behaviour
An automated vehicle’s operation can be summarised by its performance of three steps [41]:
- Sensing the environment through the detection of obstacles and other vehicles.
- Planning future actions using local measurements and (where available) information received through vehicle-to-vehicle communication.
- Executing the planned actions while following the programmed trajectory.
As such, most research publications tend to focus on the autonomous vehicle navigation and its understanding of the surrounding environment, using intelligent algorithms [42,43,44,45,46,47] as well as using the sensor data for the internal condition of the vehicle to govern the optimal driving strategy [48]. To enhance the overall efficiency of traffic flow, hazard detection, and collision avoidance of the autonomous vehicle, it would need to be programmed to coexist in the public domain alongside human drivers, and to learn to recognise and adapt to human behaviour [49]. A vehicle platoon can be defined as a group of connected automated vehicles (CAVs) traveling together at a consensual speed, following the leading vehicle while maintaining a predetermined inter-vehicle distance [14]. Platooning is said to contribute to the improvement of mobility, fuel consumption, travel time, and traffic safety, and so there are many research projects funded by government bodies and private tech and/or automotive firms. The UK Heavy Goods Vehicle (HGV) Platooning project is a series of real-world trials to take place in a live commercial operating environment [15]. Backed by the policy direction of the UK’s Department for Transport and the technical leadership of Highways England (now known as National Highways), Transport Research Laboratory (TRL) Limited leads the consortium of project partners in achieving their research objective of understanding the requirements of operating a live platoon on UK roads.
The European Commission, under the Framework 7 programme, funded the Safe Road Trains for the Environment (SARTRE) project to study the strategies and technologies for platooning vehicles on un-modified public highways [16]. The technology is meant to operate platoons on public highways, without the need for modification to the actual road infrastructure, alongside other conventional non-platooning vehicles, while addressing safety, congestion, and environmental concerns. The company claims that platoons are estimated to provide up to 20% reduction in emissions, reduce collisions caused by human actions, and provide smoother traffic flow increasing throughput. This project is a joint venture of seven entities across four countries [17,18].
6. Lane Changing Behaviour and Congestion
Considering the route intention, desired speed, and comfort, a driver may choose to change lanes, which involves the lateral movement from their current lane to an adjacent lane. Depending on the environment, this could be considered as arbitrary or mandatory lane change, where the latter must be accomplished within a given timeframe. The length of time it takes the driver from the start of the manoeuvre to the point of lane crossing is also considered a function of the driving behaviour [50].
Autonomous vehicles undertaking co-operative lane changing using coordination protocols could provide a safer and more efficient lane changing manoeuvre [51]. Researchers have agreed that optimised lane-changing manoeuvres in conjunction with smaller headway gap between trailing ConFAVs have the potential to significantly reduce congestion [52]. Congestion is typically caused by the unbalanced usage of lanes and abrupt lane-changing behaviours within a high-volume traffic environment, causing a chain reaction of vehicles braking and slowing down, creating what is known as a shockwave [53]. Co-operative lane changing and platooning could be a solution to these shockwaves.
7. Testing Safety of ConFAVs
ConFAVs are able to acquire information about their surrounding more efficiently with high-precision sensors, potentially eliminating common human driver errors due to tiredness, maloperation, and reckless driving. Thus, they are commonly advertised as providing an efficient solution to many safety-related issues. However, fatal collisions over the years involving these autonomous technologies [54,55] have shown that whilst the technology is very advanced, there is still a long way to go to ensure safe driving.
Traditional road-testing method for vehicles would prove very difficult to achieve the test requirements of autonomous vehicles. Zheng et al. (2020) explains that research data show that an autonomous vehicle would have to drive at least 240 million kilometres to prove that their safety parameters are not less than that of the conventional human driver. This amounts to a fleet of 100 cars being tested at 50 kph continuously over a period of 6.8 years, which would need to be restarted if there were any modifications. Thus, the simulation method of testing is preferred [56].
8. Current Gaps in Research
In a study undertaken by the National Highway Traffic Safety Administration (NHTSA) involving two light vehicles, it was determined that vehicle following behaviours were on a list of 37 pre-crash scenarios identified as the most common driving situations that lead to crash events. The operational safety of autonomous vehicles has to be quantified using defined metrics to provide a clear understanding of the level of risk associated with AV deployment on public highways [57].
In 2016, the UK government in collaboration with ATKINS released a two-stage report on the impact of connected autonomous vehicles on traffic flow, laying out the parameters that needed to be changed within graphical user interface (GUI) simulation software PTV VISSIM [58,59] to adequately represent their driving behaviour. They assessed nine capability levels where 0 was the most cautious behaviour and 9 represented the most assertive behaviour [60]. The European Union’s Horizon 2020 project named “CoEXist”, which aimed to provide vital information for the transition phase from conventional vehicles to automated vehicle on urban roads, published a series of documents in 2018 which covered the technical behavioural parameter sets for automated vehicles [61]. These behavioural sets were validated [62] and published for four types of driving logic: rail safe, cautious, normal, and all-knowing. The shortfall of both models was that a global value was assigned to each of the Wiedemann 99 parameters, without altering the behaviour of ConFAV to act differently when following a conventional human driven vehicle, versus another ConFAV.
This entry is adapted from the peer-reviewed paper 10.3390/su14116910
This entry is offline, you can click here to edit this entry!