The isolated micro-grid system can be composed of a variety of energy sources such as the Photovoltaic generator, the wind system, a methanation system, possibly even a hydraulic generator in such farm places. All these energy sources must be connected to serve the load part and when there is excessive production of electrical energy, an electrical storage system must appear.
- energy management
- micro-grid
1. Photovoltaic Generator
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| IPh | 7.9163 A | Ki | 0.07 %/deg.C |
| I0 | 1.3196 × 10−10 A | a | 0.9467 |
| Isc | 7.89 A | T | 273 + (10, 15, 25, 30) K |
| Voc | 43.4 V | Tn | 298 K |
| Rs | 0.53082 Ω | G | (500, 750, 1000) W/m2 |
| Rp | 159.1067 Ω | Gn | 1000 W/m2 |
| Vmp | 34.4 V | Imp | 7.27 A |
| K | 1.38 × 10−23 J/K | Eg | 1.2 eV |
| q | 1.6 × 10−19 C | ns | 72 |
| PPV | 5 kW | VPV | 172 V |
| IPV | 29.069 A | Ns∗Np | 5*4 |
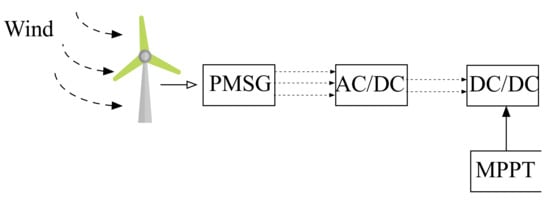
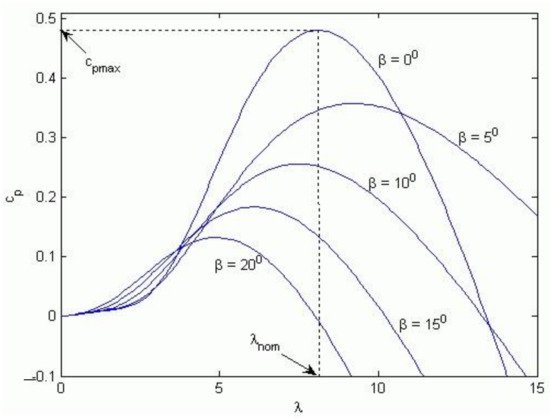
2. Wind Turbine
2.1. Mechanical Subsystem
2.2. Electrical Subsystem
| Mechanical Parameters | Electrical Parameters | ||||
|---|---|---|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value |
| Pme | 13,500 W | C4 | 5 | Te | 50 N.m |
| Cp | 0.48 | C5 | 21 | P | 4 |
| Vw | -- m/s | C6 | 0.0068 | Øm | 0.1688 web |
| λ | 1.2 | S | 33.36 m2 | rs | 0.0918 Ω |
| Ω | 300 tr/min | ρ | 1.292 Kg/m | ωr | 314.159 tr/min |
| R | 3 m | J | 148.5 Kg.m2 | ||
| β | 0 deg | F | 1.4 N.m.s/rad | ||
| C1 | 0.5176 | ωm | 31.41 rad/s | ||
| C2 | 116 | Tm | 45 N.m | ||
| C3 | 0.4 | ||||
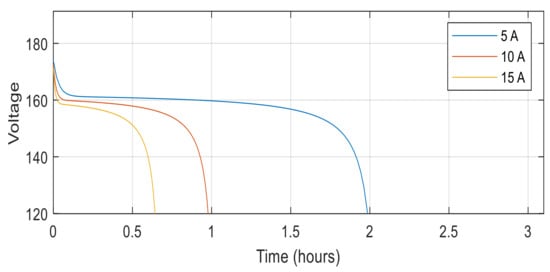
3. Lithium Battery Pack
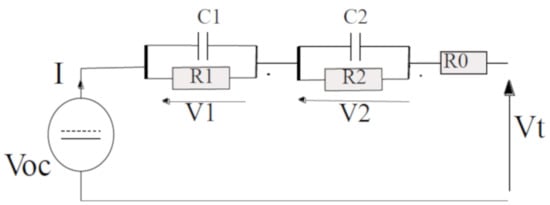
? is the current, ?0 represents the Ohmic resistance of the storage device, ?1 and ?2 denote the polarization voltage over ?1. ?1 and ?2. ?2, respectively. ?? is the terminal voltage, ??? represents the open-circuit voltage (OCV), which is a function of ???.
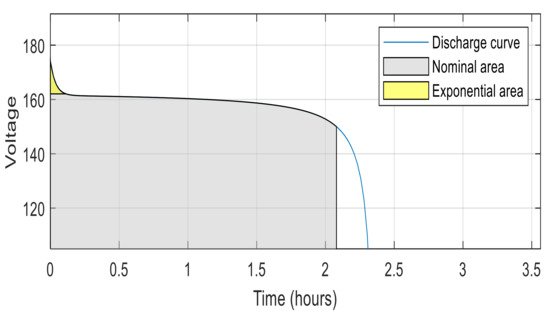
| Parameter | Value |
|---|---|
| Pn | 1500 Wh |
| Vn | 150 V |
| Qn | 10 Ah |
| R0 | 0.15 Ω |
4. Converters
This entry is adapted from the peer-reviewed paper 10.3390/su14052870
References
- Rao, L.N.; Gairola, S. PV System Analysis under Partial Shading Using a Sine Model. Int. J. Renew. Energy Res. 2018, 8, 280–290.
- Radu, R.; Micheli, D.; Alessandrini, S.; Casula, I.; Radu, B. Modeling and Performance Analysis of an Integrated System: Variable Speed Operated Internal Combustion Engine Combined Heat and Power Unit–Photovoltaic Array. J. Energy Resour. Technol. 2015, 137, 32001–32010.
- Chenouard, R.; El-Sehiemy, R.A. An interval branch and bound global optimization algorithm for parameter estimation of three photovoltaic models. Energy Convers. Manag. 2020, 205, 112400.
- Said, M.; Shaheen, A.M.; Ginidi, A.R.; El-Sehiemy, R.A.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Estimating Parameters of Photovoltaic Models Using Accurate Turbulent Flow of Water Optimizer. Processes 2021, 9, 627.
- Hammoumi, D.; El Bekkali, C.; Karim, M.; Taoussi, M.; El Ouanjli, N.; Bossoufi, B. Direct controls for wind turbine with PMSG used on the real wind profile of essaouira-Morocco City. Indones. J. Electr. Eng. Comput. Sci. 2019, 16, 1229–1239.
- Angala Parameswari, G.; Habeebullah Sait, H. A comprehensive review of fault ride-through capability of wind turbines with grid-connected doubly fed induction generator. Int. Trans. Electr. Energy Syst. 2020, 30, e12395.
- Asmine, M.; Brochu, J.; Fortmann, J.; Gagnon, R.; Kazachkov, Y.; Langlois, C.-E.; Larose, C.; Muljadi, E.; MacDowell, J.; Pourbeik, P.; et al. Model Validation for Wind Turbine Generator Models. IEEE Trans. Power Syst. 2011, 26, 1769–1782.
- Sørensen, P.; Andresen, B.; Fortmann, J.; Pourbeik, P. Modular structure of wind turbine models in IEC 61400-27-1. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5.
- Flah, A.; Irfan, A.K.; Agarwal, A.; Sbita, L.; Marcelo, G. Simoes Field-oriented control strategy for double-stator single-rotor and double-rotor single-stator permanent magnet machine: Design and operation. Comput. Electr. Eng. 2021, 90, 106953.
- Ogunjuyigbe, A.S.O.; Ayodele, T.R.; Adetokun, B.B. Modelling and Analysis of Dual Stator-Winding Induction Machine using Complex Vector Approach Engineering Science and Technology, an International Journal Modelling and analysis of dual stator-winding induction machine using complex vector approach. Eng. Sci. Technol. Int. J. 2018, 21, 351–363.
- Rajan Singaravel, M.M.; Arul Daniel, S. Sizing of hybrid PMSG-PV system for battery charging of electric vehicles. Front. Energy 2015, 9, 68–74.
- Rothenberger, M.J.; Safi, J.; Liu, J.; Anstrom, J.; Brennan, S.; Fathy, H.K. Improving Lithium-Ion Battery Pack Diagnostics by Optimizing the Internal Allocation of Demand Current for Parameter Identifiability. J. Dyn. Syst. Meas. Control 2017, 139, 081001.
- Scrosati, B.; Garche, J. Lithium batteries: Status, prospects and future. J. Power Sources 2010, 195, 2419–2430.
- Di Domenico, D.; Stefanopoulou, A.; Fiengo, G. Lithium-Ion Battery State of Charge and Critical Surface Charge Estimation Using an Electrochemical Model-Based Extended Kalman Filter. J. Dyn. Syst. Meas. Control 2010, 132, 061302.
- El-Sehiemy, R.A.; Hamida, M.A.; Mesbahi, T. Parameter identification and state-of-charge estimation for lithium-polymer battery cells using enhanced sunflower optimization algorithm. Int. J. Hydrogen Energy 2020, 45, 8833–8842.
- Kraiem, H.; Flah, A.; Mohamed, N.; Alowaidi, M.; Bajaj, M.; Mishra, S.; Sharma, N.K.; Sharma, S.K. Increasing Electric Vehicle Autonomy Using a Photovoltaic System Controlled by Particle Swarm Optimization. IEEE Access 2021, 9, 72040–72054.
- Hajia, N.; Venkatesh, B. SOC model of high power Lithium-Ion battery. In Proceedings of the 2015 IEEE Electrical Power and Energy Conference, London, ON, Canada, 24 October 2015; pp. 112–119.
- Rezzak, D.; Boudjerda, N. Management and control strategy of a hybrid energy source fuel cell/supercapacitor in electric vehicles. Int. Trans. Electr. Energy Syst. 2017, 27, e2308.
- Tankari, M.A.; Camara, M.B.; Dakyo, B. DC-bus voltage control for multi-sources systems—Battery and Supercapacitors. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 1270–1275.
- Reshma Gopi, R.; Sreejith, S. Converter topologies in photovoltaic applications—A review. Renew. Sustain. Energy Rev. 2018, 94, 1–14.
- Patin, N. 2—DC/AC Converters. In Power Electronics Applied to Industrial Systems and Transports; Elsevier: Amsterdam, The Netherlands, 2015; Volume 2, pp. 35–100. ISBN 978-1-78548-001-0.