The battery modelling (BM) problem is a constrained, multi-dimensional, mixed variable, non-convex, non-linear optimisation problem. Many bio-inspired techniques have been successfully employed to estimate the battery parameters. When bio-inspired algorithms are implemented for COM to extract parameters in real time, then they are called grey box models.
- electrochemical models
- mathematical models
- circuit-oriented models
- black box modelling
- grey box modelling
1. Introduction
The lifetime of any battery depends on its physical properties. The aging of battery cells is also nonlinear. A battery’s lifetime cannot be extended by minimising the power consumption at a particular point. Rather, it depends on the way the power is consumed, as well as current extraction patterns and current levels. Moreover, continuous drawing of high current inhibits the residual capacity [1]. Battery Management system (BMS) are essential to ensure the safe, fail-safe and efficient operation of batteries.
The main function of battery management systems is ensuring the safe operation of a battery, controlling a battery’s charge and discharge process, cell balancing, over temperature protection and estimating the state-of-charge (SoC) by measuring voltage, current and temperature. BMS monitors the conditions and state of the battery such as SoC, state-of-health (SoH), Depth of Discharge (DoD) and operating temperature [2][3]. However, these states are to be inferred from the state estimators that depend on the battery model. Therefore, the modelling of a battery becomes an important role in studying, estimating or predicting the real-time operation of the battery.
The mathematical modelling of a battery is significant because of the following reasons: (i) Development of efficient BMS. (ii) Key in the improvement of charging/discharging techniques and the enhancement of battery capacity. (iii) Need to capture the influence of power consumption on the battery. (iv) To prevent serious damage to batteries from overcharging or over-discharging. (v) Faster and safer way to study battery behaviour under different operating conditions. (vi) Identifying the operating limits that achieve best lifetime for specific applications.
2. Types of Battery Modelling
A wide variety of battery models have been developed with differing complexities which can be useful in various application areas [4][5][6][7][8][9][10]. According to the degree of physical insight, battery models can be differentiated into three levels, viz., white box model (e.g., electrochemical model), grey box model (e.g., circuit-oriented model) and black box model (e.g., artificial neural network (ANN) model) [11]. An important factor in the modelling of a battery is the estimation of battery parameters. Different modelling strategies for extracting the battery parameters are electrochemical, mathematical, circuit-oriented and data-driven [12][13].
In order to simplify calculations, the SP model was developed for the condition of low-rate charge and discharge. This model makes the assumption of even distribution and concentration of lithium ions in the liquid phase everywhere in the battery and also assumes that the electric potential of the solid phase is constant in the electrode. Compared with the P2D model, the SP model has fewer solving equations, fewer parameters and higher solving efficiency. However, this oversimplification reduced the accuracy of the model. In order to deal with these shortcomings, an extended SP model was developed, in which liquid phase diffusion and heterogenous reactions were considered. While the SP model simplifies the P2D model by virtually eliminating the partial differential equations that deal with liquid phase diffusion and also simultaneously reduces the electrode to a single particle of consideration, the extended SP model further simplifies the electrode into a single active particle but no longer directly solves the partial differential equation by iteration, but uses curve fitting or approximate solution to process the partial differential equation. Although the complexity of the model has increased by this process in the computation of an extended SP model, the actual computational efficiency has not decreased too much due to the avoidance of iterative solving [14].
Summarising, there is no doubt that good electrochemical battery models serve as some of the most accurate among battery models, due to the very fact that they can mathematically explain key behaviours of a battery at the microscopic scale based on the basis of chemical reactions occurring inside the battery in the liquid phase and in the electrode. Considering accuracy as the most important aspect of modelling, these models are excellent and can be used to complement experimental data for evaluation of other models. One advantage of electrochemical models over real data is that internal states are fully observable, allowing ‘virtual measurements’ of quantities that cannot be measured in practice. They are able to even record the changes caused by temperature changes. As these temperature changes result in different responses from an electrochemical perspective, these models can account for fluctuations and changes in temperature [15].
Based on the Shepherd discharge model, mathematical models are mainly developed to predict system-level behaviour. Empirical equations or math-based stochastic models are used in mathematical models, which only evaluate the charge recovery effect and ignores all other factors. The number of equations is reduced and simplified compared to the electrochemical model [16]. These models monitor the non-linear relationship between the real-time operation of the battery and the discharge rate without considering the recovery effect [7][17]. The use of mathematical models is very low, because the relation with the parameters of the model and I-V characteristics is not sufficient [18].
3. Battery Modelling Using Black Box Modelling Data-Driven Techniques
Many soft computing and optimisation techniques have been developed for battery parameter estimation. These techniques are called data-driven approaches which include (a) fuzzy-based estimation, (b) fuzzy-based neural network, (c) artificial neural network, (d) bio-inspired algorithm, (e) support vector machine, etc.
Since the default capabilities required for performing machine learning (ML) algorithms are generally included in BMS, ML techniques for modelling charging/discharging profiles are promising. Large amounts of data storage and robust data analytic tools are essential for ML model implementation. ML techniques are adaptable to any changes in the system and need minimum resources. Modelling is a fairly simple process that can be carried out based on the amount of information given. Modelling the charging/discharging profiles of battery systems can be performed using various machine learning tasks such as pattern recognition, clustering and classification. For predicting the charging and discharging behaviour of any battery system, models based on an artificial neural network and ML techniques other than ANN are also employed.
Machine learning outperforms traditional methods when it comes to predicting battery parameters due to its ability to deal with nonlinearity. By implementing a learning model, a general machine learning system for monitoring battery conditions can simulate the nonlinear relationship between input and output variables. The model’s input variables can be a variety of elements that affect battery performance, while the model’s output variables include battery state characteristics including SOC, remaining useful life (RUL) and capacity.
This framework consists of three steps: data pre-processing, training and estimation.
4. Battery Parameters Extraction Techniques Using Grey Box Modelling Data-Driven Approach
Bio-inspired algorithms have also been extensively researched in recent years owing to their versatility and ease of implementation [19]. To model a battery, the internal circuit parameters need to be estimated. Estimation of these parameters is difficult due to their non-linear behaviour. The battery modelling (BM) problem is a constrained, multi-dimensional, mixed variable, non-convex, non-linear optimisation problem. Many bio-inspired techniques have been successfully employed to estimate the battery parameters [9][18][20][21]. When bio-inspired algorithms are implemented for COM to extract parameters in real time [9], then they are called grey box models. BM stands as a complex iterative procedure, and such complex associated BM analytical calculations are not handled accurately by the derivative-based methods and thus, the optimal solution is not guaranteed by the analytical methods. Apart from the deterministic methods, derivative free soft computing techniques such as GA are needed for the parameter identification to identify the optimal values for the polynomial coefficients of battery parameters of RC model [9]. This type of method is generally called bionic intelligent optimisation algorithms. Compared to all other methods, this technique has obvious advantages in accuracy and reliability, and it has become a popular method for parameter identification [22].
The battery modelling problem is also treated as a bi-objective optimisation problem in most of the recent research. Two objectives such as discharging terminal voltage and surface temperature are minimised using non-dominated sorting GA (NSGA) for lithium-ion batteries. Identified parameters of the P2D electro chemical model can indicate battery internal characteristics accurately, but the charging scenario, ageing mechanism and COM are not analysed. A multi-objective optimisation approach is also applied for COM parameter identification treating charge/discharge data at different currents [23][24][25][26][27].
Direct measurement EMF method is used to determine the state of charge of NiMH batteries for electric cars by employing first and second order equivalent circuit models. Results show that the precision of the second order model is higher than the first order model [28]. A systematic comparative study of various equivalent circuit models, i.e., twelve lumped COMs, was conducted for parameter optimisations [29]. On model comparison, it is suggested to prefer a lower order RC battery model, since other n-order RC models [30] are found expensive, complex and more susceptible to uncertainties [31]. Battery models that are accurate and simple are preferred.
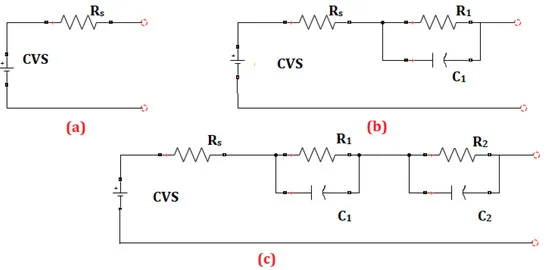
In Figure 1 , RS is the total resistance of the two electrodes, electrolytes and contacts. The transient behaviour of the battery is characterised using R1, R2, C1 and C2. Two RC networks having the time constants τ1 = R1 × C1 and τ2 = R2 × C2 (in the order of seconds and minutes, respectively) are used to depict the internal charge distribution of the battery. Constant voltage source (CVS) represents for the battery’s internal voltage source, which is modelled as the battery’s open circuit voltage (OCV) characteristics. CVS and OCV have been demonstrated to differ experimentally based on the amount of current.
This entry is adapted from the peer-reviewed paper 10.3390/su131810042
References
- Chaudhari, K.; Kandasamy, N.K.; Kanamarlapudi, R.K.; Gooi, H.B.; Ukil, A. Modeling of charging profiles for stationary battery systems using curve fitting approach. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 2777–2781.
- Moura, S.J.; Chaturvedi, N.A.; Krstić, M. Adaptive partial differential equation observer for battery state-of-charge/state-of-health estimation via an electrochemical model. J. Dyn. Syst. Meas. Control 2014, 136, 11.
- He, H.; Xiong, R.; Guo, H.; Li, S. Comparison study on the battery models used for the energy management of batteries in electric vehicles. Energy Convers. Manag. 2012, 64, 113–121.
- Grandjean, T.R.B.; McGordon, A.; Jennings, P.A. Structural identifiability of equivalent circuit models for Li-ion batteries. Energies 2017, 10, 90.
- Jongerden, M.R.; Haverkort, B.R.H.M. Battery Modelling; University of Twente, Faculty of Mathematical Sciences: Enschede, The Netherlands, 2008; ISBN 1381-3625.
- Li, S.; Ke, B. Study of battery modeling using mathematical and circuit oriented approaches. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8.
- El Ghossein, N.; Salameh, J.P.; Karami, N.; El Hassan, M.; Najjar, M.B. Survey on electrical modeling methods applied on different battery types. In Proceedings of the 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2015; pp. 39–44.
- Timmermans, J.-M.; Nikolian, A.; De Hoog, J.; Gopalakrishnan, R.; Goutam, S.; Omar, N.; Coosemans, T.; Van Mierlo, J.; Warnecke, A.; Sauer, D.U.; et al. Batteries 2020—Lithium-ion battery first and second life ageing, validated battery models, lifetime modelling and ageing assessment of thermal parameters. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–8 September 2016; pp. 1–23.
- Thirugnanam, K.; TP, E.R.J.; Singh, M.; Kumar, P. Mathematical modeling of Li-ion battery using genetic algorithm approach for V2G applications. IEEE Trans. Energy Convers. 2014, 29, 332–343.
- Muenzel, V.; de Hoog, J.; Brazil, M.; Vishwanath, A.; Kalyanaraman, S. A multi-factor battery cycle life prediction methodology for optimal battery management. In Proceedings of the 2015 ACM Sixth International Conference on Future Energy Systems, Bangalore, India, 14–17 July 2015; pp. 57–66.
- Yu, Y.; Narayan, N.; Vega-Garita, V.; Popovic-Gerber, J.; Qin, Z.; Wagemaker, M.; Bauer, P.; Zeman, M. Constructing accurate equivalent electrical circuit models of lithium iron phosphate and lead–acid battery cells for solar home system applications. Energies 2018, 11, 2305.
- Seaman, A.; Dao, T.-S.; McPhee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Source 2014, 256, 410–423.
- Singh, P.; Khare, N.; Chaturvedi, P.K. A Comprehensive Review on Li-ion Battery Ageing Estimation Techniques for Green Energy Vehicles. Int. J. Eng. Sci. Res. Technol. 2017, 6, 22–39.
- Zhou, J.; Xing, B.; Wang, C. A review of lithium ion batteries electrochemical models for electric vehicles. In Proceedings of the E3S Web of Conferences, EDP Sciences, Jeju Island, Korea, 7–9 August 2020; Volume 185, p. 4001.
- Fan, G.; Li, X.; Zhang, R. Global Sensitivity Analysis on Temperature-Dependent Parameters of A Reduced-Order Electrochemical Model And Robust State-of-Charge Estimation at Different Temperatures. Energy 2021, 223, 120024.
- Hu, T.; Zanchi, B.; Zhao, J. Simple analytical method for determining parameters of discharging batteries. IEEE Trans. Energy Convers. 2011, 26, 787–798.
- Gao, L.; Liu, S.; Dougal, R.A. Dynamic lithium-ion battery model for system simulation. IEEE Trans. Compon. Packag. Technol. 2002, 25, 495–505.
- Kroeze, R.C.; Krein, P.T. Electrical battery model for use in dynamic electric vehicle simulations. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–16 June 2008; pp. 1336–1342.
- Kai, H.; Yong-Fang, G.; Zhi-Gang, L.; Hsiung-Cheng, L.; Ling-Ling, L. Development of Accurate Lithium-Ion Battery Model Based on Adaptive Random Disturbance PSO Algorithm. Math. Probl. Eng. 2018, 2018, 13.
- Zhang, L.; Chang, H.; Xu, R. Equal-width partitioning roulette wheel selection in genetic algorithm. In Proceedings of the 2012 Conference on Technologies and Applications of Artificial Intelligence, Tainan, Taiwan, 16–18 November 2012; pp. 62–67.
- Kumar, P.; Bauer, P. Parameter extraction of battery models using multiobjective optimization genetic algorithms. In Proceedings of the 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010, Ohrid, Macedonia, 6–8 September 2010; pp. T9-106–T9-110.
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Source 2012, 198, 359–367.
- Brand, J.; Zhang, Z.; Agarwal, R.K. Extraction of battery parameters of the equivalent circuit model using a multi-objective genetic algorithm. J. Power Source 2014, 247, 729–737.
- Zhang, L.; Wang, L.; Hinds, G.; Lyu, C.; Zheng, J.; Li, J. Multi-objective optimization of lithium-ion battery model using genetic algorithm approach. J. Power Source 2014, 270, 367–378.
- Shen, J.; He, Y.; Ma, Z. Simultaneous model selection and parameter estimation for lithium-ion batteries: A sequential MINLP solution approach. AIChE J. 2016, 62, 78–89.
- Sun, X.; Ji, J.; Ren, B.; Xie, C.; Yan, D. Adaptive forgetting factor recursive least square algorithm for online identification of equivalent circuit model parameters of a lithium-ion battery. Energies 2019, 12, 2242.
- Wu, G.; Zhu, C.; CC, C. Comparison of the first order and the second order equivalent circuit model applied in state of charge estimation for battery used in electric vehicles. J. Asian Electr. Veh. 2010, 8, 1357–1362.
- Shen, S.; Sadoughi, M.; Hu, C. Online estimation of lithium-ion battery capacity using transfer learning. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Seogwipo-si, Korea, 5–8 May 2019; pp. 1–4.
- Wang, Z.; Zeng, S.; Guo, J.; Qin, T. Remaining capacity estimation of lithium-ion batteries based on the constant voltage charging profile. PLoS ONE 2018, 13, e0200169.
- Cao, Y.; Kroeze, R.C.; Krein, P.T. Multi-timescale parametric electrical battery model for use in dynamic electric vehicle simulations. IEEE Trans. Transp. Electrif. 2016, 2, 432–442.
- Forman, J.C.; Bashash, S.; Stein, J.L.; Fathy, H.K. Reduction of an electrochemistry-based li-ion battery model via quasi-linearization and pade approximation. J. Electrochem. Soc. 2010, 158, A93.